
适用于半桥型MMC附加限流控制的直流线路纵联保护方案
2023-02-07 10:22束洪春田鑫萃薄志谦
电力自动化设备 2023年1期
束洪春,任 敏,田鑫萃,李 涛,薄志谦
(昆明理工大学电力工程学院,云南昆明 650051)
0 引言
随着不可再生能源的日益衰竭及环境压力的不断增大,提高水能、风能等清洁能源的发电比例是大势所趋。中国幅员辽阔,清洁能源基地主要在西北和西南地区,而负荷中心主要集中在中部及东部沿海地区,能源资源和负荷中心呈逆向分布,采用高压直流输电技术实现大容量远距离输电是解决上述问题的有效手段[1-3]。柔性直流输电技术不存在换相失败、无功补偿问题,且具有谐波水平低、控制灵活等一系列的优势,因此得到了广泛的关注与迅速的发展,但当直流侧发生故障时,子模块电容迅速放电,过冲电流上升速率极快,对换流站等一次设备造成威胁[4-5]。
目前工程中主要通过大容量的直流断路器(DC circuit breaker,DCCB)或具有故障自清除能力的子模块(如全桥型子模块)这2 种方式清除直流侧故障。全桥型子模块能有效清除故障电流,但相比于半桥型子模块,增加了大量的电力电子器件,提高了换流站的成本[6]。DCCB 造价昂贵,且开断容量有限,通过有效的限流措施可降低对DCCB 和直流线路保护速动性的要求,目前较多文献讨论了通过增设硬件限流装置以抑制故障电流,较常见的为在一次回路中串入限流电抗器,但限流电抗器的参数值过大将影响稳定运行,限流效果有限[7-8]。文献[9-10]提出利用超导限流器抑制故障电流的幅值和上升率,但其造价较高,且需要低温等特殊的运行环境,故障后不易恢复超导状态,难以满足大容量直流输电系统的需求。
半桥型子模块虽然不具备清除故障电流功能,但通过设计合理的控制方法,可快速有效地抑制故障电流发展,目前常见的控制方法有虚拟阻抗法、参考值置零法、直流电流反馈控制法等[11-12]。文献[13-14]提出了一种利用电流变化率迅速减少子模块投入数的控制策略,该策略能有效抑制故障电流的上升率和幅值。文献[15]设计了一种根据直流电流和子模块电容电压大小重构直流电压指令值的自适应控制器,在故障状态下能有效抑制故障电流。上述方案仅考虑抑制故障极电流,但正、负极直流线路间存在耦合,因此健全极的电流波动会导致该极换流器的限流控制误投入。本文提出一种基于半桥型子模块换流器的主动限流控制策略:单极故障下,通过零模电压变化率在故障极启动该策略;双极故障下,通过两极的线路电压变化率启动该策略,通过获取的直流电流实际值与指令值的偏差量将有功类的偏差量与有功类指令值进行对比,从而得到修改因子以作用于脉冲生成环节,快速减少子模块的投入数。
与硬件限流方案相比,基于控制策略的限流措施有较高的经济性。控制器的响应速度理论上为微秒级,能在故障电流达到安全阈值之前将其抑制,但也改变了故障电流这一电气特征量,从而对基于故障电流信息的纵联保护造成影响,降低了保护的灵敏性,甚至导致其拒动。文献[16]通过线路两端的故障电压、电流获取线路的计算电阻,根据其大小判别区内、外故障。文献[17]根据发生区内故障时线路两端的电流故障分量极性相同,发生区外故障时线路两端的电流故障分量极性相反构成纵联保护。文献[18]提出对分布电容电流进行补偿,从而提出改进的电流差动保护。直流侧过冲电流在1~2 ms甚至更短时间内即可达到闭锁值[19],有效的限流措施可延缓故障电流上升率,而上述文献的关注点为故障区域识别,未考虑主动限流控制投入下的故障电流特性。本文根据换流阀两端获取的故障电流瞬时值,提出一种基于换流阀电流两侧差流的纵联保护方案,并利用所提限流控制策略中的修改因子调整线路保护判据的门槛值,使所提保护方案不受限流控制的影响,具有自适应性。讨论了该保护方案在直流电网等拓扑结构下的适用性。最后,基于PSCAD/EMTDC 进行大量仿真,验证了本文所提限流控制器的有效性,证明了本文所提保护方案不受分布电容影响,能可靠地识别故障区域。
1 模块化多电平换流器主动限流控制策略
模块化多电平换流器(modular multilevel converter,MMC)拓扑结构如图1所示。图中:Udc为直流电压测量值;uj(j=a,b,c)为阀侧j相交流电压;Ldc为平波电抗器的电感;L0、R0和C0分别为桥臂电感、桥臂等效电阻和子模块电容;Rg为接地极等效电阻;Lac为交流系统等效电感;HBSM表示半桥型子模块。
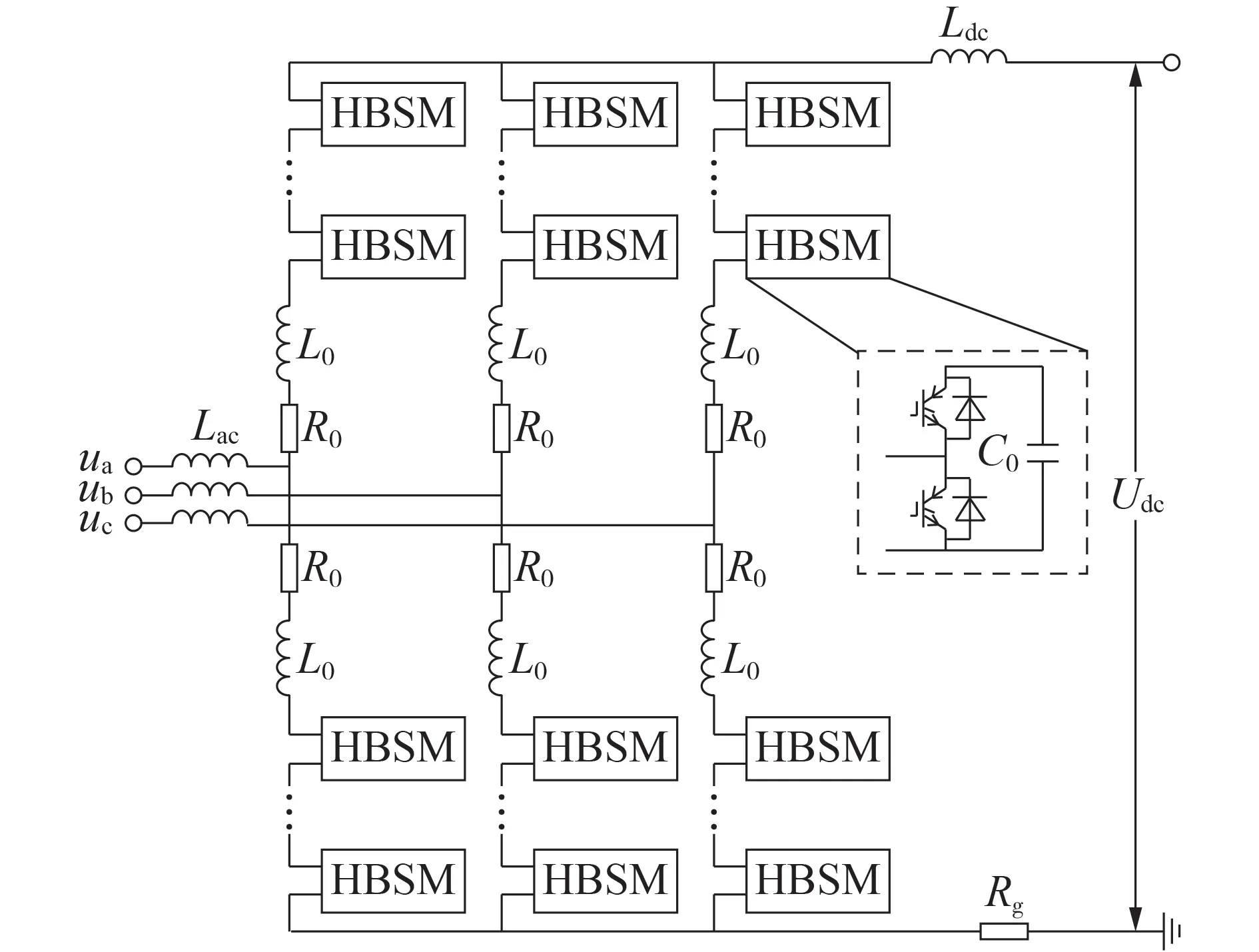
图1 MMC拓扑结构Fig.1 MMC topology
1.1 主控制器工作原理
1.2 限流控制器工作原理
限流控制器应在故障状态下尽快抑制故障电流,并且要保证不需要投入时不误动,为满足上述2点要求,本文设计了如图A1所示的限流控制器。以MMC 定直流电压控制为例,为防止限流控制器在非故障扰动的情况下投入,应设计一个有效的控制启动环节。
鉴于零模量能快速、灵敏地反映单极故障,将零模电压u0的变化率与滞回比较器得到的动作信号作为单极故障下故障极的MMC 限流控制器启动信号,其中滞回比较器在输入信号大于设定值时输出1,小于设定值时输出0。双极故障下,两极电压迅速下降,由于该故障危害极大,一般不考虑维持功率传输,而是直接闭锁停运。鉴于此,可取躲过非故障扰动引起的两极电压变化率最大值作为双极故障下限流控制器的启动信号。
考虑到故障会引起直流电压发生高频振荡,使得限流控制器频繁退出与启动,所以增设了单稳触发器,仅采用限流控制器启动信号的第1 个有效区间,每次启动后,需初始化单稳触发器。
假设桥臂上每个子模块具有相同的电容电压uc,每个桥臂均有2N个子模块,则有:
式中:kp3、ki3分别为限流控制器的比例、积分系数。
定义修改因子kmod为:
2 基于附加限流控制器下的直流侧故障电流特性分析
双极基于MMC 的高压直流输电(MMC-based high voltage direct current,MMC-HVDC)系统拓扑结构如图2 所示。图中:PDL1+和PDL1-分别为整流侧正极和负极电流测量元件;PDL2+和PDL2-分别为逆变侧正极和负极电流测量元件;PNL1+、PNL1-和PNL2+、PNL2-分别为整流侧和逆变侧的中性点两侧的测量元件;f1—f4为不同位置的故障,对于线路保护元件而言,f1为区内故障,f2—f4为区外故障。
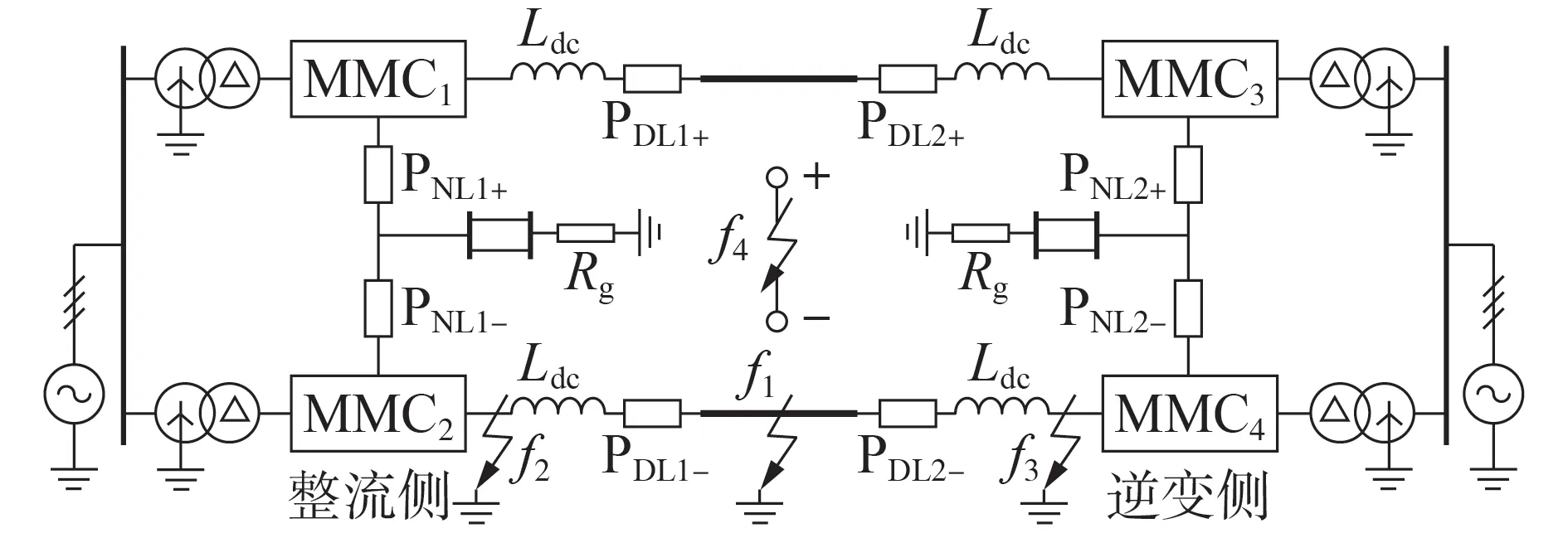
图2 双极MMC-HVDC系统拓扑结构图Fig.2 Topology of bipolar MMC-HVDC system
直流故障特性分析是构成保护方案的基础,基于控制等限流方案的投入,理论上能抑制故障电流的发展,但同时也改变了电气特征量,考虑到控制系统的响应时间为微秒级[22],而纵联差动保护受通信时延的影响,速动性较差,此时两端控制系统在保护出口前就已经先后投入,若保护仍依据原有的整定值,则可能引起保护的误动或拒动,很大程度上影响了保护动作的可靠性,因此有必要分析限流控制器投入前、后的故障电流特征,并依此提出适用于限流控制器投入的纵联保护方案。
2.1 限流控制器投入前的故障电流特性分析
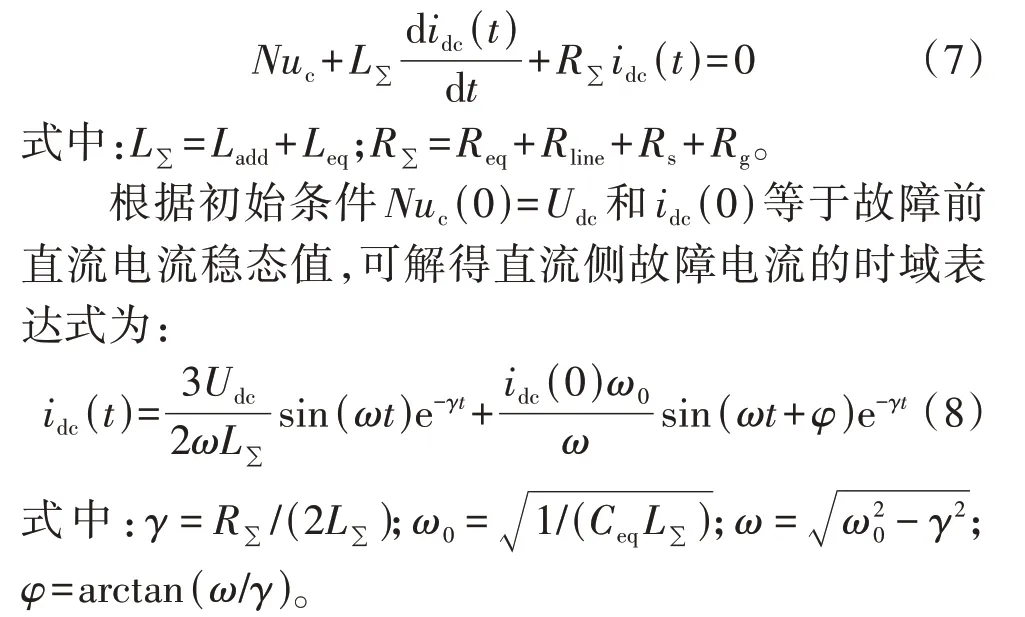
由于两极换流站及线路参数均对称,在忽略接地极阻值的情况下,双极故障理论上可视为两极分别发生了单极故障,以正极线路接地故障为例,闭锁前故障极电流回路如图1所示,对图1中的桥臂列写基尔霍夫电压定律方程如式(5)所示。
由于桥臂等效电阻极小,故近似认为故障初始时刻下,每相桥臂等效电容电压等于直流线路电压。图1 简化后的等效电路图如附录A 图A2 所示。图中:Ladd为平波电抗器电感与线路等效电感之和;Rline为线路等效电阻;Ceq=6C0/N;Leq=2L0/3;Req=2R0/3;Rs为过渡电阻。由图A2 可知故障回路的微分方程为:
2.2 限流控制器投入后故障电流特性分析
假设限流控制器t0时刻启动,根据图A1 可知,通过控制将部分子模块旁路相当于在回路中串入一个激励(kmod-1)Nucε(t),其中ε(t)为单位阶跃函数。因此限流控制器投入后,等效电容电压突变为:
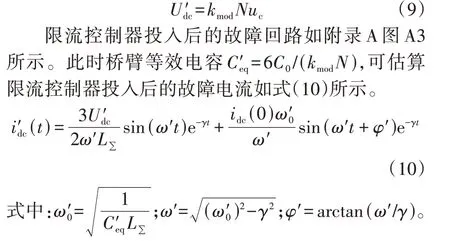
主动限流控制投入后,直流侧故障极线路电流如附录A 图A4 所示。通过式(8)、(10)可看出:限流控制器投入前,直流侧故障电流受稳态运行下的Udc、idc(0)和故障回路的结构影响;限流控制器投入后,直流侧故障电流受时变的kmod影响。限流控制器动作后,保护装置测量的值为控制响应后的电气量,若令kmod=1,则将其代入式(10)即可得到式(8),以此估算限流控制器未起作用时的故障电流。由式(8)、(10)可得到限流控制器投入前、后的电流差Δimod为:

3 适用于主动限流控制的自适应纵联保护方案
控制系统响应速度理论上达到微秒级,具有良好的速动性,不需要引入额外的硬件类限流设备,有利于降低对保护速动性的要求。这类限流方案成为近年来的研究热点,虽然控制方式各有不同,但基本通过增大虚拟阻抗、降低指令值等办法抑制故障电流上升率。
考虑到控制响应速度与线路保护在同一时间级别,故障后主动投入的附加限流控制器会导致电气特征变化,给保护准确识别故障区域带来困难。针对该问题,本文结合第2 节提出了主动限流控制策略,考虑限流控制对故障电流的影响,提出一种适用于主动限流控制的纵联保护方案。
单端换流站结构如图3 所示。图中:iDL+、iDL-分别为正、负极线上的电流;iGND为接地极线路电流;fex、fin分别表示换流站出口故障和正极直流线路故障。
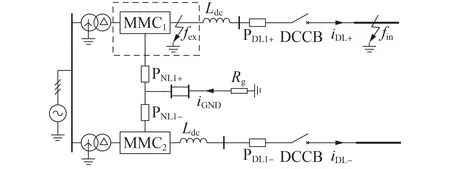
图3 单端换流站结构示意图Fig.3 Structural diagram of single terminal converter station
若将换流阀及换流站直流出口部分看作1 个节点,则该节点内部故障对于线路保护而言,均属于区外故障,如图3 中的虚线框所示,因此通过线路测量元件PDL+/-和中性线路测量元件PNL+/-构造换流阀两侧差流以识别故障方向,其中,PDL+/-取母线指向线路的电流方向为正方向,PNL+/-取换流阀指向中性点的电流方向为正方向。
3.1 保护启动判据
本文以改进电压梯度算法作为保护启动判据[23],如式(12)所示。

式中:udc(l)为时刻l的直流电压值;Δumax为保护启动门槛值。为保证保护启动的灵敏性和可靠性,Δumax按躲过交流侧故障引起直流侧电压梯度值进行整定,取Kop=1.3,因此设:

式中:Δumax,ac为交流侧最严重故障下引起的直流电压梯度最大值。该启动判据简单,具有较高的灵敏度。
3.2 故障选极判据
利用零模量可实现准确选择故障极,若令:

式中:iNL+、iNL-分别为测量元件PNL+和PNL-获取的电流测量值。
可知i0的本质为零模电流。若i0未达到门槛值,则判断为双极故障。为提高保护方案的可靠性,增加根据两极线路电流判断是否为双极故障或非故障扰动的判据。则本文的故障选极判据如式(15)所示。
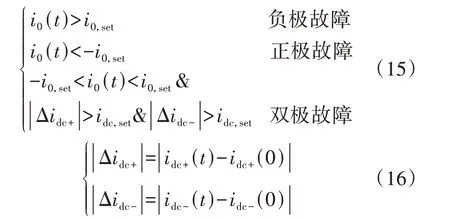
式中:idc+(0)、idc-(0)分别为正、负极线稳态下的直流电流;idc+(t)、idc-(t)分别为正、负极线的实时测量电流;i0,set按躲过非单极接地故障下最大不平衡电流Δi0,max整定;idc,set按躲过非直流侧故障下的最大扰动电流Δidc,max整定。
正极故障下,限流控制器投入后,有i′0=i′NL++iNL-,即i0=i′0+Δimod+。双极故障下,若两极限流控制器同时投入,则有i′0=i′NL++i′NL-=(iNL+-Δimod+)+(iNL--Δimod-)(Δimod+、Δimod-分别为限流控制器投入前后正、负极的电流差),而idc+=i′dc++Δimod+,idc-=i′dc-+Δimod-,理论上Δimod+与Δimod-大小相同、方向相反。
综上所述,单极故障下,i0(t)仅受限流控制的影响,而双极故障下,i0(t)不受限流控制的影响。取可靠系数Krel=1.3,因此考虑限流控制器投入后的整定值应为:
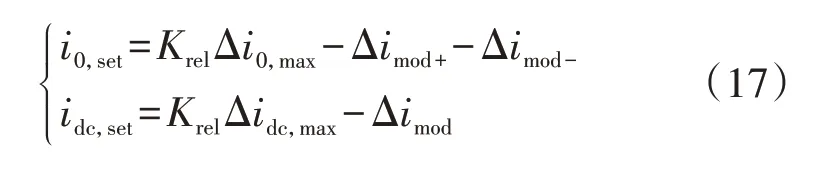
Δimod+和Δimod-分别由正、负极限流控制器投入后,各自计算得到的kmod决定。
3.3 故障区域识别
由图3 可知,在正极发生反向故障fex或换流阀内部故障的情况下,测量元件PDL1+、PNL1+测得的电流之和idiff迅速增大,若正极发生线路故障fin,则idiff理论上为0,鉴于此,基于换流阀两侧电流的差流构造故障区域识别判据,如式(18)所示。

式中:idiff,set应按躲过非区外故障下的最大不平衡电流Δidiff,max整定,如式(19)所示。

式中:Krel,I为可靠系数,取值为1.3。
线路故障下,限流控制器投入后,有:

可见线路故障下,换流阀两端的差流i′diff不受限流控制投入的影响。而直流侧出口故障下,换流阀两端的差流为:

式中:Δimod,op为对端换流阀限流控制器投入后产生的故障电流差值。可见该故障工况下,i′diff受本端和对端限流控制的影响,考虑限流控制对阈值整定的影响较为困难,但直流侧出口故障与线路故障下,换流阀两侧差流的差异明显,阈值极小。直流侧出口故障下,即使受限流控制的影响,造成保护灵敏度下降,换流阀两侧差流仍远大于保护动作的阈值,不会影响动作的可靠性和速动性。
以整流侧为例,逻辑信号传输示意图如图4 所示,图中Sid1、Sid2分别为换流站MMC1、MMC2发出的逻辑信号。若单端判定为区外故障,则该端发送给对端的逻辑信号为1;若单端判定为区内故障,则该端发送给对端的逻辑信号为0。
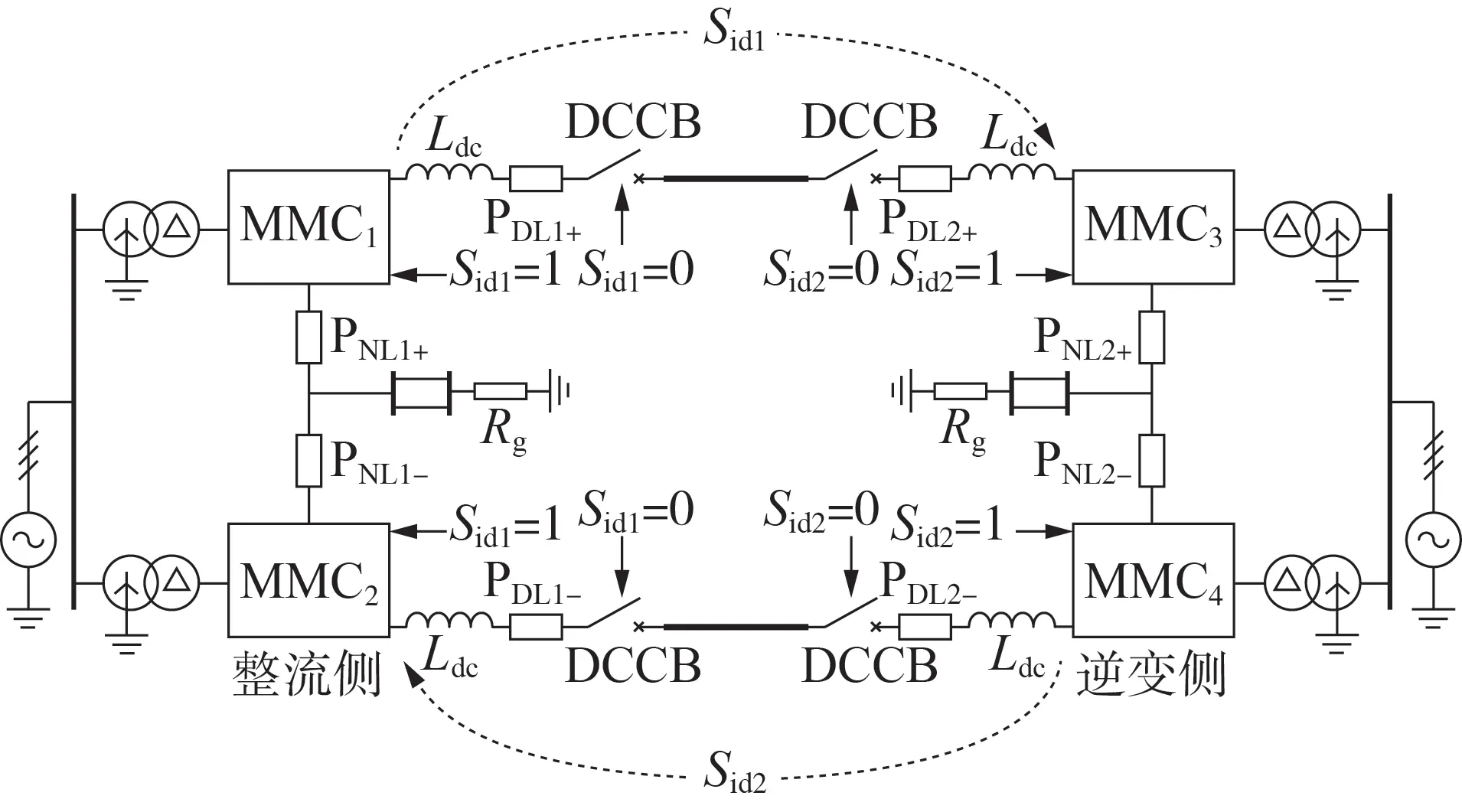
图4 逻辑信号传输示意图Fig.4 Schematic diagram of logic signals transmission
考虑到保护的目的在于有选择性地迅速隔离故障,因此若本端识别为反向故障,则闭锁本端换流器;若本端识别为正向故障,则线路保护动作。该策略无需通信即可实现,能快速、有选择性地清除故障电流。DCCB 断开后,由于故障点去游离和断路器恢复断开能力需要一定时间(一般不少于几十毫秒),在此期间内,根据对端信息即可判断故障是否为线路故障,从而决定是否进行重合。
3.4 保护方案
综合3.1—3.3 节的分析,本文所提保护方案的整体流程如附录A 图A5 所示。根据直流电压梯度值判断是否启动保护。保护启动后,特征量在一定时间内可能达不到整定值,考虑到线路长度、过渡电阻等因素,为提高保护可靠性,以采样频率10 kHz为例,以连续的5 个采样点为周期判断特征量是否达到门槛值,取每个判断环节时窗为1 ms。在本端判断出正向故障或反向故障后,根据接收对端发送的逻辑信号Sid即可确定故障区域。
分布电容电流的存在使线路两端的测量电流不再满足基尔霍夫电流定律,因此分布电容对纵联电流差动保护的影响较大,而由图A5 可知,本文所提保护方案仅用到了换流站本地量,无需对端换流站的电气量,因而不受分布电容影响。
3.5 保护方案适用性分析
前文介绍了保护方案在双端柔性直流输电系统下的适用性,柔性直流电网拓扑结构也较为常见。考虑通过控制策略限流,本节以张北柔性直流电网输电工程为背景,以图5 所示的四端MMC-HVDC 环网拓扑结构为例,分析本文所提保护方案的实用性。图中:L12、L24、L34、L13为直流线路;f1—f8为不同位置的故障;MMC1+为MMC1的正极换流阀;PDL12+、PDL13+分别为MMC1+所连的2条直流线路电流测量元件。

图5 四端MMC-HVDC环网拓扑结构Fig.5 Topology of four terminal MMC-HVDC loop network
根据3.2 节的分析,四端MMC-HVDC 环网的故障选极判据仍根据式(14)—(16)构成,各特征量的阈值同样以3.2节的整定原则为依据。
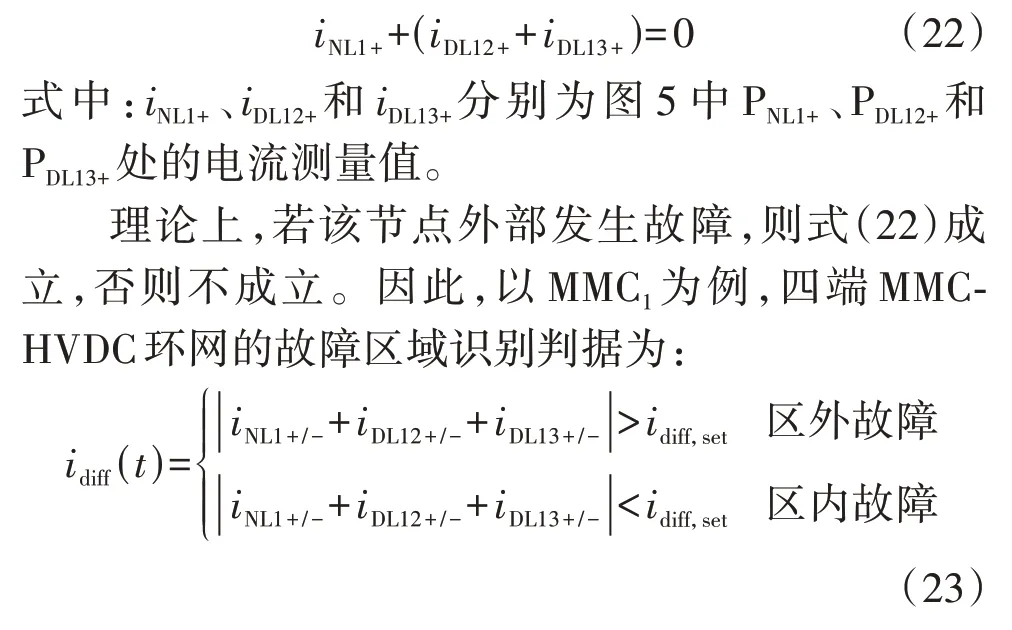
将MMC1+及其直流侧出口部分视作1 个节点,如图5 中虚线框区域所示。PDL+/-取母线指向线路的电流方向为正方向,PNL+/-取换流阀指向中性点的电流方向为正方向。稳态运行下有:
式中:idiff,set同样以3.3节给出的整定原则为依据。
虽然根据式(23)能有效识别正向故障和反向故障,但无法识别故障发生在哪条线路,因此不能将本端的逻辑信号作用于DCCB 断开。某直流线路故障下,所有换流站均向故障点放电,因而故障线路两端电流突变方向必然相同,而健全线路上无故障点,电流突变方向必然相反,取:

式中:Krel.Ⅱ为可靠系数,取值为1.3。
可知故障线路两端测得的电流应满足式(24),而健全线路则不满足。以图5 所示的电网中发生正极故障为例,保护方案识别结果如表1 所示,表中Sid3、Sid4分别为MMC3、MMC4发出的逻辑信号。若发生线路故障,则Sid1—Sid4均为0,根据两端电流突变方向均为正识别出故障线路;若为某一换流站反向故障,则该换流站发出的逻辑信号为1。综上所述,结合线路电流突变方向,本文所提保护方案在直流电网中仍能准确快速识别故障。
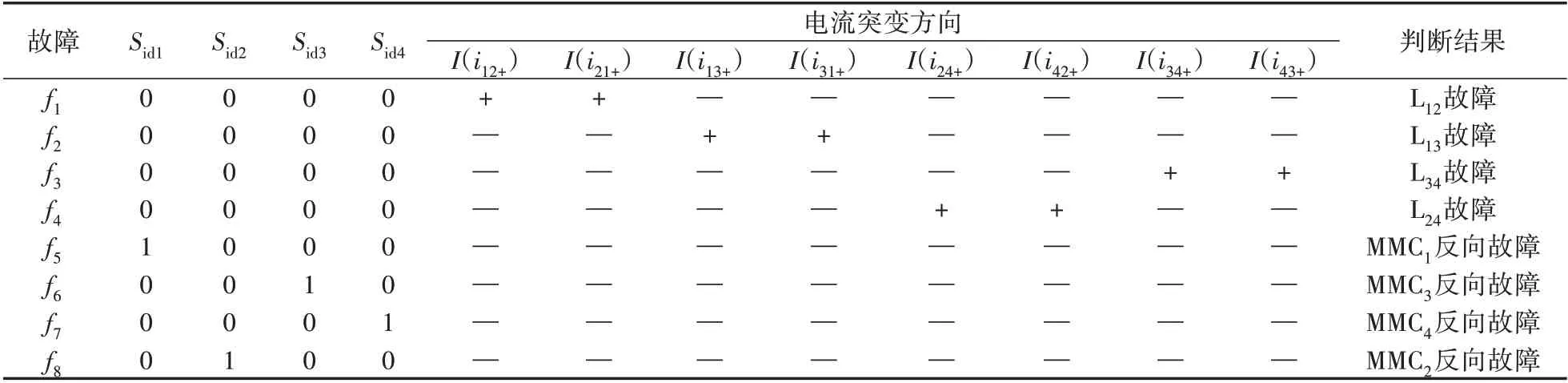
表1 不同故障下保护方案的判断结果Table 1 Judgement results of protection schemes under different faults
4 仿真验证
利用PSCAD/EMTDC 分别搭建如图2、5 所示的双端MMC-HVDC 系统和四端MMC-HVDC 环网仿真模型,模型参数分别如附录B 表B1 和表B2 所示。架空线路采用依频模型,双端MMC-HVDC 系统的线路长度为180 km,双端MMC-HVDC系统中线路L12、L13、L24、L34的长度分别为207.9、49.9、192.7、217.6 km。在图2 和图5 中的测量元件处配置保护,采样频率设置为10 kHz。
4.1 双端MMC-HVDC系统典型故障仿真分析
取故障时刻t0=1 ms,设置负极线路单极故障f1、反向区外故障f2、正向区外故障f3和线路双极故障f4。
考虑最严重的扰动情况,根据仿真获取交流侧故障引起的直流电压梯度最大值Δumax,ac=33 kV,中性母线上的最大不平衡电流Δi0,max=0.38 kA,根据式(16),在限流控制器未投入的情况下,i0,set=0.5 kA;直流线路上最大不平衡电流Δidc,max=0.96 kA,因此取idc,set=1.3 kA。非换流阀内部及其出口故障下,最大不平衡电流Δidiff,max<0.03 kA,参考柔性直流相关规范后[24],在工程合理的设计范围内取idiff,set=0.1 p.u.。
4.1.1 区内单极故障
中性点不平衡电流和换流阀两侧差流仿真结果如附录B 图B1 所示。可以看出,限流控制器的投入能有效抑制直流故障电流,但也降低了保护方案的灵敏性。保护方案在ts时刻启动,i0(t)在t1时刻到达整定值,保护判断为直流侧接地故障,此后idiff(t)在10 个采样点内未达到整定值,在t2时刻结束计算,两端均判断为负极正向接地故障,故Sid1=Sid2=0,并向DCCB发送触发信号,线路在一段时间后重启。
将限流控制对故障电流的影响考虑在内,可知该保护动作的灵敏性与可靠性不受其影响。图B1中,若不对整定值进行调整,则限流后的i0(t)在保护启动后的10 个采样点内,不能满足5 个连续的采样点达到整定值,从而导致保护拒动。
4.1.2 区外故障
1)反向区外故障f2。
整流侧换流站正极出口处发生接地故障,仿真结果如附录B 图B2 所示。图B2(a)中,由于近端换流站放电回路阻尼小,在限流控制器投入后的故障电流i0(t)仍能在保护启动后的1 ms 内达到阈值0.5 kA。判断为负极接地故障后,整流侧idiff(t)满足阈值条件,t2时刻结束计算,判断为反向区外故障,Sid1=1,并闭锁本侧故障极换流阀。图B2(b)中,逆变侧在t1时刻判断为负极接地故障,t2时刻判断为正向故障,断开本侧断路器,在接收到对端发送的Sid1逻辑信号后,闭锁断路器,中断线路重启。
2)正向区外故障f3。
逆变侧换流站正极出口处发生接地故障,仿真结果如附录B 图B3 所示。图B3(a)中,整流侧保护在ts时刻启动,t1时刻判断为负极接地故障,此后idiff(t)不满足阈值条件,t2时刻结束计算,判断为正向故障,Sid1=0,并断开本侧断路器,在准备重合闸期间等待对端逻辑信号。图B3(b)中,逆变侧在t1时刻判断为负极接地故障,t2时刻idiff(t)达到门槛值,对于逆变侧,判断为反向故障,闭锁本侧故障极换流阀,并发出逻辑信号Sid2=1。
4.1.3 线路双极故障
线路中点发生双极故障f4,由于两极电流对称,因此仅展示正极仿真结果,如附录B 图B4 所示。图中:两端的保护启动后,i0(t)在1 ms内不满足阈值条件,保护在t1时刻判断不为接地故障;直流线路电流在t2时刻达到整定值,保护判断为双极故障,两端换流站闭锁。
4.1.4 保护方案抗过渡电阻能力分析
双极故障或区外故障一般为金属性故障,高过渡电阻出现在线路单极故障中的可能性较大,因此本节验证保护方案在单极故障下的抗过渡电阻能力。
单极故障下,仅i0(t)受过渡电阻影响,idiff(t)只与换流阀两侧差流有关,不受过渡电阻影响,而系统稳态运行时,零模电流基本为0,故i0(t)的门槛值低,具有较好的灵敏性。设置图2 中f1的过渡电阻为300 Ω,仿真结果如附录B 图B5 所示。过渡电阻越大,i0(t)的值越小,限流控制对故障电流的抑制程度也越小,可以看出,在300 Ω 的过渡电阻下,本文所提保护方案仍能准确识别故障区域。大量仿真实验结果表明,当过渡电阻在300 Ω 以下时,本文所提保护方案均能准确动作。
4.1.5 保护方案的抗噪声干扰能力分析
考虑到实际工程中存在外界噪声和二次系统噪声对保护造成干扰,在故障f1—f4的情景中加入30 dB 高斯白噪声,检验所提保护方案动作的可靠性,仿真结果如附录B图B6和图B7所示。
噪声为一种高频的波动信号,对于电流幅值影响较小,但使电流信号产生多个奇异点,会对电流的变化率产生较大影响。本文所提保护方案仅用到了求和函数、abs 函数和比较函数,算法简单,可靠性高,具有良好的抗噪声干扰能力。由图B6、B7 可以看出,在包含30 dB 高斯白噪声的不同故障下,本文所提保护方案均能可靠动作。
4.2 四端MMC-HVDC环网典型故障仿真分析
为分析保护方案在四端柔性直流电网中的适用性,以图5中故障f1和f5为例进行仿真验证。
4.2.1 线路L12的单极故障f1
根据图B8 和图B9,保护启动到完成本地识别不超过2 ms,假定换流站将本地识别结果以光速向其他换流站传播,由于最长线路L34的长度为217.6 km,故通信时延不超过1 ms。综上所述,本文所提保护方案能在3 ms 内完成故障识别,在四端直流环网中同样具有较好的速动性。
4.2.2 换流站1出口故障f5
换流站1 正极出口故障的仿真结果如附录B 图B10所示,可以看出,MMC1—MMC4的i0(t)均能在保护启动后1 ms 内达到阈值,故障选极结果为正极。图B10(a)中,idiff(t)大于阈值,保护判断结果为换流站1出口故障。
5 结论
本文提出一种基于零模电压和线路电压变化率启动的限流控制策略,分析了限流控制对故障电流的影响,并提出了适用于半桥型MMC 主动限流控制下的纵联保护方案,所得结论如下。
1)限流控制通过零模电压和线路电压变化率启动,能快速有效地抑制直流故障电流发展;避免了健全极限流控制受耦合的影响而误启动。
2)保护方案根据限流控制对故障电流的抑制程度自动调整阈值,使其不受限流控制投入的影响,提升了动作的可靠性。
3)保护方案算法简单,仅用到各换流站端本地量,并与其对端换流站交换其判别结果,不依赖线路边界元件,不受线路分布电容影响,换流站间数据无需同步,有较好的耐受过渡电阻及抗噪声能力。
4)保护方案在点对点、直流环网等拓扑结构中均有较好的适用性。
直流侧故障过冲电流严重危害一次设备,有效的限流措施尤为重要,保护方案应在限流措施迅速投入的情况下保证动作的灵敏性与可靠性。本文所提思路在工程应用方面还需进一步研究。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
电力自动化设备(2022年11期)2022-11-19
电气技术(2022年1期)2022-01-26
太原科技大学学报(2021年4期)2021-08-30
广东电力(2020年12期)2021-01-05
通信电源技术(2018年3期)2018-06-26
广西电力(2016年4期)2016-07-10
湖北电力(2016年8期)2016-05-09
湖北电力(2016年8期)2016-05-09
中国科技信息(2015年18期)2015-11-10
中国医疗器械信息(2015年10期)2015-04-13
