
基于边缘检测的大规模风电场送出线路纵联保护算法
2023-02-07 10:22徐艳春范钟耀孙思涵MILu
电力自动化设备 2023年1期
徐艳春,范钟耀,孙思涵,MI Lu
(1. 三峡大学梯级水电站运行与控制湖北省重点实验室,湖北宜昌443002;2. Department of Electrical and Computer Engineering,Texas A&M University,College Station 77840,USA)
0 引言
近年来,风力发电得到了快速的发展,为实现碳达峰、碳中和目标,提高风能消费占一次能源消费的比例,规模化风电场并网发电已经成为中国能源电力领域的必然趋势[1]。大规模风电场的送出线路一般为110 kV 及以上的电压等级,如果考虑风电系统阻抗不稳定、弱馈、频偏、高谐波含量等故障特征,则采用常规的输电线路保护方案进行保护配置,将会导致传统保护装置的保护性能下降[2-6]。因此研究适用于风电场送出线路的纵联保护显得尤为重要[7]。
目前,已有学者对风电场的短路电流特性和送出线路的纵联保护进行了一定的研究,并取得了一些成果。文献[8]通过仿真指出当外部系统为弱系统时,若逆变型电源送出线路发生两相短路故障,则其故障相电流差动保护存在拒动现象。文献[9]指出双馈风机的低电压穿越控制方式会对其输出的短路电流产生影响,不再与传统电网短路电流的特征相同。对于这些问题,文献[10]利用区内、外故障下线路两侧电流主要分量的衰减速度差异来构造基于衰减因子差的纵联保护判据,文献[11]利用故障后线路两侧电流的频率差异提出了基于电流频率差的线路纵联保护,但这2 种算法仅适用于双馈风机撬棒电路投入的情况,而不适用于永磁直驱风电场。文献[12]利用递推最小二乘法计算线路两侧保护装置感受到的阻抗值,提出了一种时域距离纵联方向保护,但其需要同时采集电流值与电压值,对数据的要求更高。文献[13]和文献[14]利用发生故障时线路两侧电流时域波形的特征,分别提出了基于皮尔逊相关系数和斯皮尔曼等级相关系数的线路纵联保护新原理,但其本质都是求相关系数的变化,且文献[13]所提出的保护算法未考虑风机弱出力的情况,当风电场出力为0 时,将面临失效的风险;文献[14]虽然考虑了风电场弱出力的情况,但未考虑其整定值受数据窗长度的影响,在数据窗减小时可能发生误动。
本文首先分析了不同类型风电场的暂态电流特征;然后通过发生故障时风电场送出线路两侧的电流采样值分别构造汉克尔矩阵并计算它们的梯度,找出线路两侧电流采样值变化大的部分并进行比较与计算,进而提出了一种基于边缘检测的大规模风电场送出线路纵联保护算法,该算法亦适用于风电场弱出力的情况,且识别故障的速度更快;最后在PSCAD/EMTDC 软件平台搭建了风电场送出线路仿真模型,基于该模型在不同场景下对所提保护方案进行了检验。
1 不同风机的暂态电流波形特征
1.1 双馈风机的暂态电流波形特性分析
当双馈风机的机端电压跌落严重时,通常投入撬棒电路保护逆变器,此时双馈风电机组的故障电流is如式(1)所示[15]。

式中:a1—a3为各分量的常数幅值,其大小与电压的跌落深度和电机的内部阻抗有关,且a3≫a1;ω1和ωr分别为与电网频率对应的角速度和与转子转速对应的角频率;φ为撬棒电路投入时,定子电流的初始相位;T′s为定子回路的时间常数;T′r为转子回路的时间常数。
当机端电压跌落不严重时,双馈风电机组的故障电流如式(2)所示[16]。

式中:Vs1和Vs2分别为故障发生前、后双馈风机的机端电压;ωs为同步角频率;Ls和Lm分别为定子电感和励磁电感;Rs为定子电阻;Ir为转子电流;t0为故障时刻。
由式(1)可知,撬棒电路投入后,故障电流中衰减的交流分量为主要分量,其频率与转子的转速有关。由式(2)可知,故障发生后,转子电流由于逆变器控制的波动而发生变化,导致故障电流频率存在偏移。
1.2 永磁直驱风机的暂态电流波形特性分析
当永磁直驱风机的机端电压跌落不严重时,其故障电流iϕ表达式为[16]:
式中:imax为逆变器能够输出的最大电流;iq为逆变器输出电流交轴分量。
由式(3)和式(4)可知,永磁直驱风机输出的故障电流受其逆变器控制参数的控制。控制系统达到稳态前,逆变器的输出存在波动。且逆变器中锁相环的响应存在一定的滞后,发生故障后其检测到的频率也不再为工频。
综上所述,风电场的故障电流存在频率偏移特性,会使得基于工频量的传统保护的灵敏度降低,甚至出现拒动的风险[2]。
当送出线路发生区外故障时,流经送出线路的电流为穿越性电流,线路两侧的电流采样值的变化大小相同、方向相反;当送出线路发生区内故障时,线路两侧的电流采样值的变化大小不同、方向相同。根据上述时域电流的波形特征,本文提出了不受频率影响的基于边缘检测的大规模风电场送出线路纵联保护。
2 基于边缘检测的风电场送出线路纵联保护
2.1 电流值汉克尔矩阵与Sobel 算子边缘检测的基本原理
2.1.1 电流值汉克尔矩阵的基本原理
对采集到的J个电流信号i1—iJ按照时间顺序进行排列,如式(5)所示。

汉克尔矩阵是指每条逆对角线上的元素都相等的矩阵,将电流采样值构造为汉克尔矩阵可使得矩阵中的每个电流采样值的相邻元素都在时域上与其相邻。基于电流信号构成的汉克尔矩阵Ih如式(6)所示。
式中:n为汉克尔矩阵列数,1<n<J;m为汉克尔矩阵行数,m=J-n-1。
将构造的汉克尔矩阵视作1 张“图像”,每个电流采样值视作1 个“像素点”,进而可以通过Sobel 算子计算梯度值。
2.1.2 Sobel算子边缘检测基本原理
Sobel 算子边缘检测是基于一阶微分的边缘检测方法,首先对像素的上、下、左、右邻域的灰度进行平均或加权平均,然后进行一阶微分处理,检测出边缘点[17],其基本步骤如下。
1)计算水平方向和垂直方向的梯度。本文采用的Sobel算子模块如图1所示。

图1 Sobel算子模块图Fig.1 Module diagram of Sobel operator
将水平、垂直梯度方向的Sobel算子分别与需要进行边缘检测的图像f(i,j)(本文中为电流采样值矩阵Ih)进行卷积,可以得到水平方向的梯度值矩阵Gx与垂直方向的梯度值矩阵Gy,其计算表达式分别如式(7)、式(8)所示。

式中:“*”表示卷积运算。
2)计算总的梯度幅值矩阵并进行标准化处理。
按照式(9)计算图像f(i,j)对应的梯度幅值矩阵G;按照式(10)对G进行标准化处理,得到标准化后的梯度幅值矩阵M。
式中:max(·)表示求矩阵元素中的最大值。
由于此时的梯度值为水平方向的梯度与垂直方向的梯度的平方和的平方根,无法表示梯度的正负方向,考虑下文计算平均梯度幅值的需要,本文采用具有方向信息的梯度值矩阵,如式(11)所示。

3)梯度幅值矩阵二值化。
将标准化后的梯度幅值矩阵M通过门限值K进行二值化得到二值化矩阵E,如式(12)所示。

二值化矩阵E中,值为1、0 的部分分别对应图像f(i,j)的边缘位置、非边缘位置。
考虑到本文使用Sobel 算子是为了找到数据窗中电流采样值变化大的部分,并且是将电流值汉克尔矩阵Ih作为图像来进行边缘检测。由于汉克尔矩阵具有逆对角线上的元素都相等的特点,会使得检测到的边缘位置对应的电流采样值有较多的重复。如果门限值过大,则边缘点的数量会过少,其对应的不重复电流采样值过少,导致异常数据的影响较大,不利于下文平均梯度幅值的计算。此外,考虑到门限值过小会导致无法准确区分电流采样值变化大的部分,本文选取门限值K=0.5。
2.2 电流采样值索引集合的确认及分区原理
本文通过边缘检测识别到的边缘位置包含很多重复的电流采样值,提取不重复部分构成索引集合Z。边缘检测只能确定电流采样值变化大的部分,无法区分变化的方向。由于电力系统正常工作时,电流波形为正弦波,进行边缘检测可能会同时识别到电流幅值正向增大和负向增大的部分,基于下文计算平均梯度幅值的需求,本文对电流采样值索引集合Z进行分区。
2.2.1 电流采样值索引集合Z的确认
找出识别到的边缘(二值化矩阵E中值为1 的部分)在电流值汉克尔矩阵Ih中所对应的电流采样值构成索引集合Z,如式(13)所示。

式中:unique(·)表示找出数组中的唯一值。
电流采样值索引集合示意图如图2 所示,图中NZ为集合Z的长度。将Z中元素对应的电流采样值在梯度值矩阵D中的梯度值集合记为D。
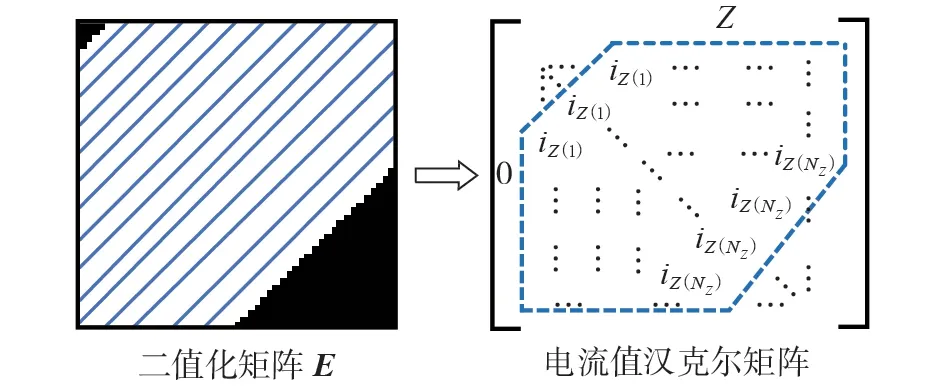
图2 电流采样值索引集合示意图Fig.2 Schematic diagram of index set of current sampling values
考虑电流采样值存在干扰时,电流波形如附录A图A1(a)所示。图中电流为标幺值,后同。采集到的异常数据会对梯度幅值矩阵G的二值化过程产生影响,如附录A 图A1(b)所示。由图A1 可知,数据窗中出现的异常数据会使得异常点及其周围点的梯度值增大,且远大于其他数据点,导致对梯度幅值矩阵G进行二值化处理后无法正常区分出电流采样值变化大的部分。
因此当计算得到的电流采样值索引集合Z中的元素数量小于阈值ε时,舍去当前梯度幅值矩阵G中的最大值,重新对其进行标准化处理,直至Z中的元素数量大于阈值ε。
考虑到阈值ε过大会延长本文所提保护算法识别故障的时间,而阈值ε过小则无法有效剔除数据窗中的异常数据,故本文将阈值ε确定为:

剔除异常数据后的二值化矩阵如附录A 图A2所示,经处理后的二值化矩阵能够正常区分出电流采样值变化大的部分。
2.2.2 电流采样值索引分区
电力系统正常工作时,电流波形为正弦波,所以电流采样值索引集合Z对应的电流采样值存在以下2种情况。
1)电流采样值索引集合Z中的元素是连续的,且集合对应的电流采样值单调递增或递减。此时的分区公式如式(15)所示,分区示意图见附录A 图A3,图中NZ1为集合Z1的长度。每段分区对应的梯度值集合D也和Z进行同等长度的分区,如式(16)所示。
2)电流采样值索引集合Z中的元素不连续且可以分为2段,2段元素的集合对应的电流采样值的变化具有单调性,但方向相反,此时需要将Z分为Z1和Z2,对应的梯度值集合分别为d1、d2。Z1、Z2和d1、d2的公式分别如式(17)和式(18)所示,分区示意图见附录A图A4,图中NZ2为集合Z2的长度。考虑到从线路上采集到的电流信号值不可避免地存在噪声,使得电流采样值的变化趋势发生变化,导致电流采样值索引集合Z中元素不连续,且不再只有2个分区。当分区数量大于2个时,仅保留长度最长的2个分区分别作为Z1和Z2。
2.3 基于Sobel算子边缘检测的线路纵联保护算法
风电场送出线路的结构拓扑图如图3 所示,风电场电源通过汇集系统汇集,最后通过主变压器升压送出至电网。

图3 风电场送出线路结构拓扑图Fig.3 Topology of wind farm outgoing transmission line structure
当送出线路发生区外故障时,以故障点为K1为例,故障示意图如附录A 图A5 所示。由图可见,此时故障电流为穿越性电流,线路两侧的电流IM、IN方向相反。
以10 kHz 的频率对线路M、N两侧的电流进行采样,并以10 ms为1个数据窗。将数据窗中的电流采样值构造为汉克尔矩阵形式,通过Sobel算子进行边缘检测,并对识别到的边缘位置进行处理和分区。线路M侧和N侧的边缘检测示意图分别如附录A 图A6 和图A7 所示。由图可见,当风电场送出线路发生区外故障时,由于流经线路两侧的电流波形幅值相差不大、方向相反,通过Sobel 算子识别到的电流采样值变化大的区域一致,且线路两侧相对应的分区所对应的梯度值正负相反。
当风电场送出线路发生区内故障时,以故障点为K3为例,故障示意图如附录A图A8所示。此时流经M、N两侧的电流不再由同一电源提供,两侧电流方向相同。
通过Sobel 算子对M、N两侧电流进行边缘检测,找出电流采样值变化大的区域并进行分区,具体过程分别如附录A 图A9 和图A10 所示。由图可见,当风电场送出线路发生区内故障时,线路两侧电流虽然会受到两侧电源电动势及阻抗角的影响,但在10 ms的数据窗内,两侧的电流采样值变化趋势总体相同。所以通过Sobel 算子进行边缘检测识别到的电流采样值变化大的区域趋于一致,且线路两侧对应的分区所对应的梯度值正负相同。
考虑到风电场电流的故障电流具有频偏特性,会使得送出线路M侧和N侧通过Sobel 算子所识别到的电流采样值变化大的区域及分区数量可能不再相同,还会出现线路一侧有2 个电流采样值变化大的区域,而另一侧只有1 个电流采样值变化大的区域的情况,如附录A 图A11 所示。图中:ZM1为风电场送出线路M侧电流采样值的1 个分区;ZN1和ZN2为风电场送出线路N侧电流采样值的2个分区。
通过上述风电场送出线路发生区外、区内故障时,使用Sobel算法进行边缘检测所得到电流采样值变化大的区域及分区的差异,本文提出通过平均梯度幅值S来识别区内故障。根据线路两侧所识别到电流采样值变化大的区域的分区数量不同,平均梯度幅值的计算方法如下。
1)当线路两侧电流都识别到2 个电流采样值变化大的分区时,有:

式中:dM1、dM2和dN1、dN2分别为线路M侧和N侧所识别到的Z1、Z2对应的梯度值;mean(·)表示求取平均值。
2)当线路两侧均只识别到1 个电流采样值变化大的分区时,有:

3)线路一侧识别到1 个电流采样值变化大的分区,而另一侧识别到2个电流采样值变化大的分区。
以M侧仅识别到1 个分区ZM1为例,此时ZM1对应的M侧电流采样值的变化方向可能为正也可能为负,所以需要考虑ZM1在N侧对应的是分区ZN1还是ZN2。
如果ZM1与ZN1存在交集,则有:

如果ZM1与ZN2存在交集,则有:

同理,当只有N侧识别到1 个分区ZN1时,如果ZN1与ZM1存在交集,则有:

如果ZN1与ZM2存在交集,则有:

4)其他情况下,将S置为2。
由上述计算过程可知,S的最大值为2。当风电场送出线路正常工作及发生区外故障时,S→0;当发生区内故障时,S>0。
由此可得保护动作的判据为:

式中:Sset为区分线路区内、外故障的平均梯度幅值的整定值。
由于在计算S时已经进行了标准化处理,所以电流幅值不同对保护算法的性能影响不大,Sset的选取主要考虑线路两侧电流数据传输、线路阻抗等因素造成的数据不同步的影响。文献[18]指出对于选用乒乓对时类同步方案的纵联保护通信,存在固有的同步误差为Δt=0.5 ms,对应工频角度为9°;另外,线路两侧的电流互感器在正常工作时有7°的角度误差[19],将两者相加并考虑一定的裕度,将线路两端的通信延时整定为1 ms。
正常运行时线路的电流表达式等效为式(26),其对侧电流所测电流波形及其延时1 ms 的电流波形如附录A图A12所示。

式中:is为电流采样值;f=50 Hz。
对加入传输误差的两侧电流进行边缘检测并计算平均梯度幅值,结果如图4所示。

图4 传输误差对平均梯度幅值的影响Fig.4 Influence of transmission error on mean gradient amplitude
由图4 可知,当存在传输误差时,由于两侧电流不再同步导致平均梯度幅值存在波动,选取一定裕度Sset1=0.1,且考虑到采集到的电流值可能存在噪声,选择Sset2=0.1。由式(27)可计算得到选择的Sset=0.2。

考虑到风电场出力为0 的条件下发生内部短路故障以及重合于永久性故障时(假设系统侧先行重合)会出现系统侧电流较大(大于电容电流的10 倍)而风电场侧电流为0 的特殊情况[12],此时通过Sobel算子对风电场侧电流进行边缘检测将无法识别电流采样值变化大的区域,对应的电流采样值索引集合Z为空集,此时S=2,远大于整定值,线路纵联保护正常动作。
综上所述,基于边缘检测的风电场送出线路纵联保护算法流程图如图5所示。
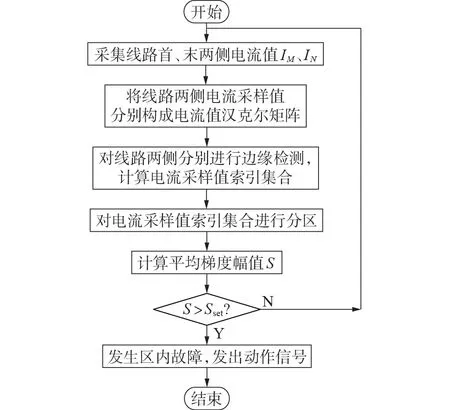
图5 基于边缘检测的风电场送出线路纵联保护算法流程图Fig.5 Flowchart of pilot protection algorithm of wind farm outgoing transmission line based on edge detection
3 仿真分析
为了验证本文所提风电场送出线路纵联保护算法的可行性,在PSCAD/EMTDC 中搭建了如图3 所示的风电场送出系统,风电场的参数见附录B。采样频率为10 kHz,数据窗长为10 ms,保护数据窗逐点向前滚动,每移动1次输出1个值。
3.1 不同故障位置以及不同故障类型影响分析
为了验证在不同的故障场景下本文所提保护算法的性能,本文在风电场送出系统中的风电场侧出口处,送出线路距离风电场10、20、30 km 处,以及系统侧外部出口处设置故障,将故障点分别记为K1—K5;故障类型设置为A相接地、AB两相相间短路、AB两相接地、三相短路故障,分别记为AG、AB、ABG、ABC。
3.1.1 风电场送出线路区内故障
以点K4在t=0 ms 时发生A 相接地故障为例,双馈风电场与永磁直驱风电场送出线路两侧的A 相暂态电流波形如附录C 图C1 所示。图中电流值为以数据窗中最大值为基准的标幺值,后同。本文所提保护算法的动态性能如图6所示。
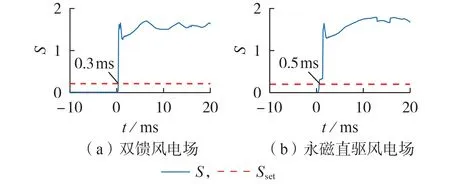
图6 风电场送出线路发生区内故障时,本文所提保护算法的动态性能Fig.6 Dynamic performance of proposed protection algorithm when internal fault occurs on wind farm outgoing transmission line
由图6 可知,双馈风电场和永磁直驱风电场采用本文所提保护算法后,其S值分别在故障发生后的0.3 ms 和0.5 ms 大于Sset,线路纵联保护能够快速可靠动作。另外,由于本文所提保护算法采用时域电流值,其不再受到风电场短路电流频率偏移的影响。
由于本文所提保护算法采用的是时域电流信号,故障发生的时刻可能对保护的性能产生影响。因此对故障时刻分别为3、6、9 ms 的情况进行仿真,保护算法的动态特性见附录C 图C2。由图可以看出,双馈风电场和永磁直驱风电场在不同时刻发生故障时,本文方法计算得到的S值均能在故障后快速地大于Sset,使得保护能够可靠动作。
3.1.2 风电场送出线路发生区外故障
以风电场出口处点K1及系统侧外部出口处点K5在t=0 ms 时分别发生A 相接地故障为例,双馈风电场和永磁直驱风电场送出线路两侧的A 相暂态电流波形如附录C 图C3 所示,保护算法的动态性能如图7所示。
由图C3 和图7 可知,不同风电场的不同区域发生区外故障时,送出线路两侧的电流幅值大小基本相同,方向相反,因此计算得到的S→0,远小于Sset,线路纵联保护不动作。

图7 风电场送出线路发生区外故障时,本文所提保护算法的动态性能Fig.7 Dynamic performance of proposed protection algorithm when external fault occurs on wind farm outgoing transmission line
不同风电场在所有故障位置和故障类型的仿真结果附录C 表C1。由表可见:在各种故障情况下2种类型的风电场在发生区内故障时,故障相的平均梯度幅值均大于整定值0.2;非故障相以及发生区外故障时,平均梯度幅值均小于整定值0.2。上述结果表明,基于边缘检测的风电场送出线路纵联保护算法在各种故障情况下均能可靠、准确地识别出故障线路,具有良好的动作性能。
3.2 不同过渡电阻及不同负载场景
线路的接地故障一般为非金属接地故障,存在过渡电阻。考虑到220 kV 线路的最大过渡电阻为100 Ω[19],为了验证本文所提保护算法的抗过渡电阻能力,以点K3发生过渡电阻为30、60、90、120 Ω 的A 相接地故障为例,计算不同过渡电阻场景下所提保护算法得到的S值,结果如表1 所示,表中Rf为过渡电阻。
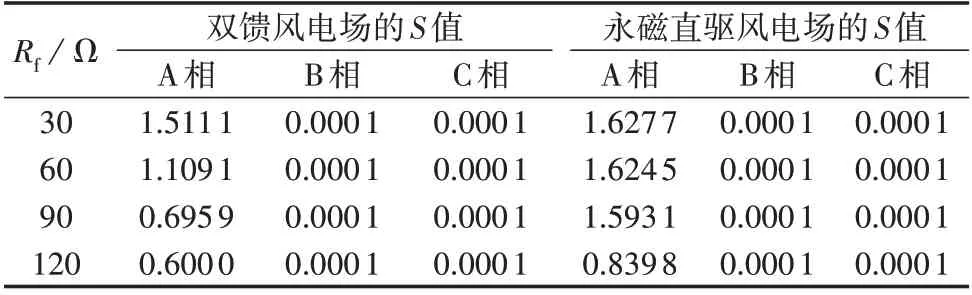
表1 不同过渡电阻场景下,本文所提保护算法的动作性能Table 1 Performance of proposed protection algorithm under different transition resistance scenarios
由表1 可知,在不同过渡电阻场景下,无论是双馈风电场或永磁直驱风电场,线路两侧非故障相的平均梯度幅值均趋于0,而故障相的平均梯度幅值随着过渡电阻值的增加而减小,但在120 Ω 的过渡电阻场景下仍能远大于整定值0.2,使得保护可靠动作。
考虑线路工况由轻载变为重载,线路两端功角差δ以及负荷电流变大,且线路内部出现高阻接地故障时故障电流变小,严重影响线路纵联保护的可靠动作[20]。因此,以双馈风电场送出线路点K3发生A 相接地故障为例,在线路不同工况及不同过渡电阻下,验证本文所算法的适应性,其动态性能如附录C 图C4 所示。由图可知:随着线路由轻载(δ=15°)至重载(δ=60°)[21]、过渡电阻由0提高到120 Ω,本文所提算法在线路轻载条件下均可灵敏动作;但在线路重载时,线路两侧的电流波形相位差变大,使得平均梯度幅值S产生波动。另外,由图C4(c)、(d)可见,当t=5 ms时,线路两侧电流经过边缘检测后出现分区完全不一致的情况,使得平均梯度幅值变为2。除此之外,当线路重载且发生区内高阻接地故障时,如果故障没有及时切除,由于线路两侧电流的相位差过大,两侧电流经过边缘检测后所得分区对应的采样电流值出现变化方向相同的部分,使得S值快速减小,线路纵联保护面临拒动风险。因此可以通过在继电保护装置中添加自保持回路,使其接收到动作信号后持续动作不返回,以此提高本文所提保护算法的可靠性。
3.3 不同风速下保护动作情况
考虑风速不同会导致风电场的出力也会存在差异,在不同风速下,以点K4发生不同故障为例对保护性能进行测试,额定风速为11 m/s。不同风速下的保护动作性能如附录C 表C2 所示,表中风速为标幺值。由表可知:在不同风速下本文所提保护算法均能正常动作;当风速大于额定风速时,由于风机存在桨距角控制,风机的出力维持在额定功率附近,计算得到的平均梯度幅值也与额定风速时基本一致。
3.4 数据窗长度的影响
数据窗长度的选择会直接影响到保护算法的性能。当数据窗的长度分别为20、10、5 ms 时,双馈风电场送出线路点K3在0 ms 时发生A 相接地故障时,平均梯度幅值的动态变化附录C 图C5 所示。由图可知:在不同数据窗下,本文所提保护算法在故障发生后均能快速识别故障;且由于边缘检测算法对电流采样值变化敏感,当数据窗中出现连续且变化大的电流采样值时均能快速判别出故障,所以在不同时间窗下的保护算法动作时间基本一致。
考虑到电流值的采集可能出现1 ms 的传输误差,在电力系统正常工作情况下,本文所提保护算法在选取不同的数据窗时的动态特性如附录C 图C6所示。由图可知,考虑传输误差后,如果选择5 ms的数据窗,计算得到的平均梯度幅值会产生周期性波动且保护会出现误动现象。对5 ms 数据窗波形中的第29 个采样点所对应的数据窗进行分析,结果如附录C 图C7 所示。由于数据窗过小,当数据窗位于电流波形的波峰附近时,线路两侧识别到的电流采样值变化大的区域不再对应,导致两侧识别到的电流采样值索引集合对应的梯度值集合dM1与dN1由异号变为同号,使得计算得到的平均梯度幅值远大于整定值,最终导致线路纵联保护误动。
综上所述,选择5 ms 数据窗会使得本文所提保护算法面临误动的风险;10、20 ms 数据窗均能使保护算法准确动作且动态性能相似,但20 ms 的数据窗所需要的数据量更大,计算时间更长。因此本文选择10 ms 的数据窗,这样既能有较好的速动性和灵敏性,又能保证所提保护算法的可靠性。
3.5 与纵联电流差动保护对比
在风力发电机进行低电压穿越时,在撬棒电路投入后其短路电流存在频率偏移特性。
3.5.1 频偏特性对线路纵联电流差动保护的影响
由于风机接入后的故障电流包含大量的非工频分量,使得傅里叶算法获取的基频信号幅值不再恒定。
当考虑频率偏移时,差动动作电流Iap如式(28)所示[2]。

式中:b1—b4均为常数,大小取决于电流偏移系数λ;Ns为1个周期内的采样点数;ns为当前采样点。
由式(28)可以看出,差动电流值会因故障电流频率偏移发生波动,使得纵联差动保护的可靠性下降。
3.5.2 外部系统为弱系统时的线路纵联保护性能分析
文献[22]和文献[8]指出当逆变型新能源场站(包含双馈风机)和外部系统的短路容量变为1∶4时,若发生两相短路故障,则比率式电流差动保护面临误动的风险。
将模型中的系统阻抗改为0.52+j11.513 Ω,使得风电场侧短路容量与系统短路容量比约为1∶4。当送出线路中点在0 ms 时发生AB 两相短路故障,比率制动式电流差动保护的动作性能如附录C 图C8所示,图中r为差动电流与制动电流的比值。本文所提保护算法的动态性能如附录C 图C9 所示。由图C8 可知,采用比率制动式差动保护的情况下,在发生AB 两相短路故障时,B 相差动电流与制动电流的比值r接近制动系数0.8,B 相差动保护灵敏度下降且面临拒动的风险。由图C9可知,本文所提保护算法得到的A、B两相的平均梯度幅值远大于整定值0.2,线路纵联保护能可靠动作。
3.6 与斯皮尔曼等级相关系数算法对比
文献[14]提出采用斯皮尔曼等级相关系数对新能源场站送出线路两侧电流波形的相似度进行度量,进而区分送出线路区、外故障。斯皮尔曼等级相关系数的计算不再是根据原始数据值本身的大小,而是通过数据的排列位置度量2 组数据的相关性,其计算公式如式(29)所示。

式中:rs为斯皮尔曼等级相关系数;xi为2 组数据的序列差;Nsw为1个数据窗中的采样点总数。
由式(29)可知,rs∈[-1,1]。当2 组数据完全正相关时,rs=1;当2组数据完全负相关时,rs=-1。
由于斯皮尔曼算法忽略了数据值的大小,而采用了序列的概念,当应用到线路纵联保护时,线路两侧采集到的电流值的具体大小可以忽略,仅需要注意整个数据窗中的电流采样值按大小排列的序列号,因此两侧电流波形是否同步、是否存在相位差对斯皮尔曼算法有巨大的影响。
3.6.1 数据窗对斯皮尔曼等级相关系数保护算法的影响
本文所提保护算法选择的数据窗为10 ms,远小于基于斯皮尔曼等级相关系数的保护原理的20 ms数据窗,且能正确动作。而当基于斯皮尔曼算法的保护原理取数据窗为10 ms、送出线路两侧波形存在1 ms 的传输误差且未发生故障的情况下,线路的一侧等效电流值以式(26)为例,另一侧电流与式(26)相反并加入1 ms 的延时。斯皮尔曼等级相关系数的变化如附录C 图C10 所示。由图C10(a)可见,当风电场送出线路两侧电流采样值数据不同步时,两侧电流波形不再满足完全负相关,斯皮尔曼等级相关系数偏离-1。由图C10(b)可见,加入1 ms延时后,在不考虑其他因素影响的情况下,斯皮尔曼等级相关系数在(-1,-0.8)范围内波动。而文献[14]中的整定值仅在(-0.92,0.87)范围内,导致线路纵联保护在正常工况下存在误动风险。所以使用斯皮尔曼算法在选取整定值时还应该考虑数据窗大小产生的影响。
3.6.2 保护动作速度对比
本文保护原理采用的数据窗长度为10 ms,采样频率为10 kHz,整定值为0.3;基于文献[14]所提斯皮尔曼算法的保护原理采用的数据窗为20 ms,采样频率为5 kHz,整定值取-0.9。双馈风电场送出线路点K3在0 ms 分别发生A 相接地、AB 两相相间短路、AB 两相相间接地、三相短路故障时,本文和文献[14]所提线路纵联保护的性能对比如附录C 图C11所示。表2 给出了在不同风电场送出线路的不同位置发生区内故障时,2 种保护算法的动作时间对比。表中tr和ts分别为本文和文献[14]所提保护算法的动作时间。
由图C11 和表2 可知,2 种保护算法在发生区内故障时均能正确动作,但在各种不同故障情况下本文所提保护算法的动作时间均小于基于斯皮尔曼等级相关系数的保护算法动作时间的1/2。这是因为在故障初期时,斯皮尔曼等级相关系数的计算受到故障前的数据影响,数据窗中需要有足够多的故障后的电流数据才能使得保护动作;而基于边缘检测的保护原理对故障的识别主要受到电流变化快慢的影响,能在故障后更快速地识别到故障的发生。

表2 2种保护算法的动作时间对比Table 2 Comparison of action time between two protection algorithms
4 结论
本文根据大规模风电场送出线路发生故障时,暂态电流的时域波形特征不同,提出了一种基于边缘检测的线路纵联保护算法,得到如下结论:
1)与传统的线路纵联保护相比,本文所提保护算法使用的数据是时域的电流采样值,不需要提取工频分量,所以不再受风电场暂态电流频率偏移特性的影响;
2)本文所提所提保护算法在故障后1 ms 内即可准确识别故障,且在风电场不同出力、不同故障类型、不同故障位置时均能可靠动作。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
计量学报(2020年7期)2020-08-07
应用数学(2020年2期)2020-06-24
液压与气动(2020年4期)2020-04-10
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
电子制作(2017年7期)2017-06-05
通信电源技术(2016年4期)2016-04-04
