
基于计算机视觉的径向跳动公差检测实验平台开发
2023-02-02 09:09陈永清郭建亮吴增文陈廉清
浙江工业大学学报 2023年1期
陈永清,贾 虹,郭建亮,吴增文,陈廉清
(1.宁波工程学院 机器人学院,浙江 宁波 315211;2.浙江工业大学 特种装备制造与先进加工技术教育部重点实验室,浙江 杭州 310023)
“互换性与测量技术”是高等工科院校机械类、近机类各专业的专业必修课,其中“几何公差及检测”内容抽象、生涩,是“教与学”的难点。几何公差的项目理论教学若辅以相应实验,可使“教与学”由难转易。然而,由于学时所限,不少高校针对几何公差相关实验仅开展直线度、平行度与垂直度误差测量实验,学生较难理解,而必须掌握的径向跳动公差往往被忽略。生产中,各类轴、圆形法兰、轴承内外圈和阀芯等回转体零件的设计和制造通常要求满足径向跳动误差。如果学生对径向跳动误差不理解,在设计中标注不当或不懂标注,轻则造成设计失败、产品报废,重则发生事故。常规的径向跳动误差检测方式是用偏摆仪两顶尖定位回转体零件,使百分表的触头与被测件外圆周径向垂直轻触,然后转动被测工件至少一周,读出百分表的最大及最小值并作差,即为被测工件该横截面的径向圆跳动误差。该检测方式效率低、操作繁琐、搬移困难、结果展示不形象,在用于检测径向全跳动、斜向圆跳动误差时,学生更是难以理解。因此,开发基于计算机视觉技术的便捷式径向跳动公差实验平台来辅助教学,既可有力补充高校的理论教学,又可启发学生的创新意识。
1 实验平台设计及工作原理
径向跳动公差测量实验平台结构如图1所示。平台主要包括大恒MER-1810-21U3C相机、COMPUTAR0814镜头、LED背光源、计算机、调速电机和顶针及支座等。相机镜头与光源分别置于工件两侧,中心轴线水平垂直。相机、镜头和光源三者中心平面与水平放置的待检件上边缘等高,实验平台如图2所示。图像采集工作过程:调速电机以预设速度带动待检件匀速转动,相机以设定频率采集图像,并将图像信息传送至计算机,由公差检测程序系统读取。电机旋转一周,相机即可采集圆周面均匀分布的素线图像信息。平台的电机转速、相机采集图像频率均可以按检测实际要求设定。采集的待检件(阀芯)源图像如图3所示。
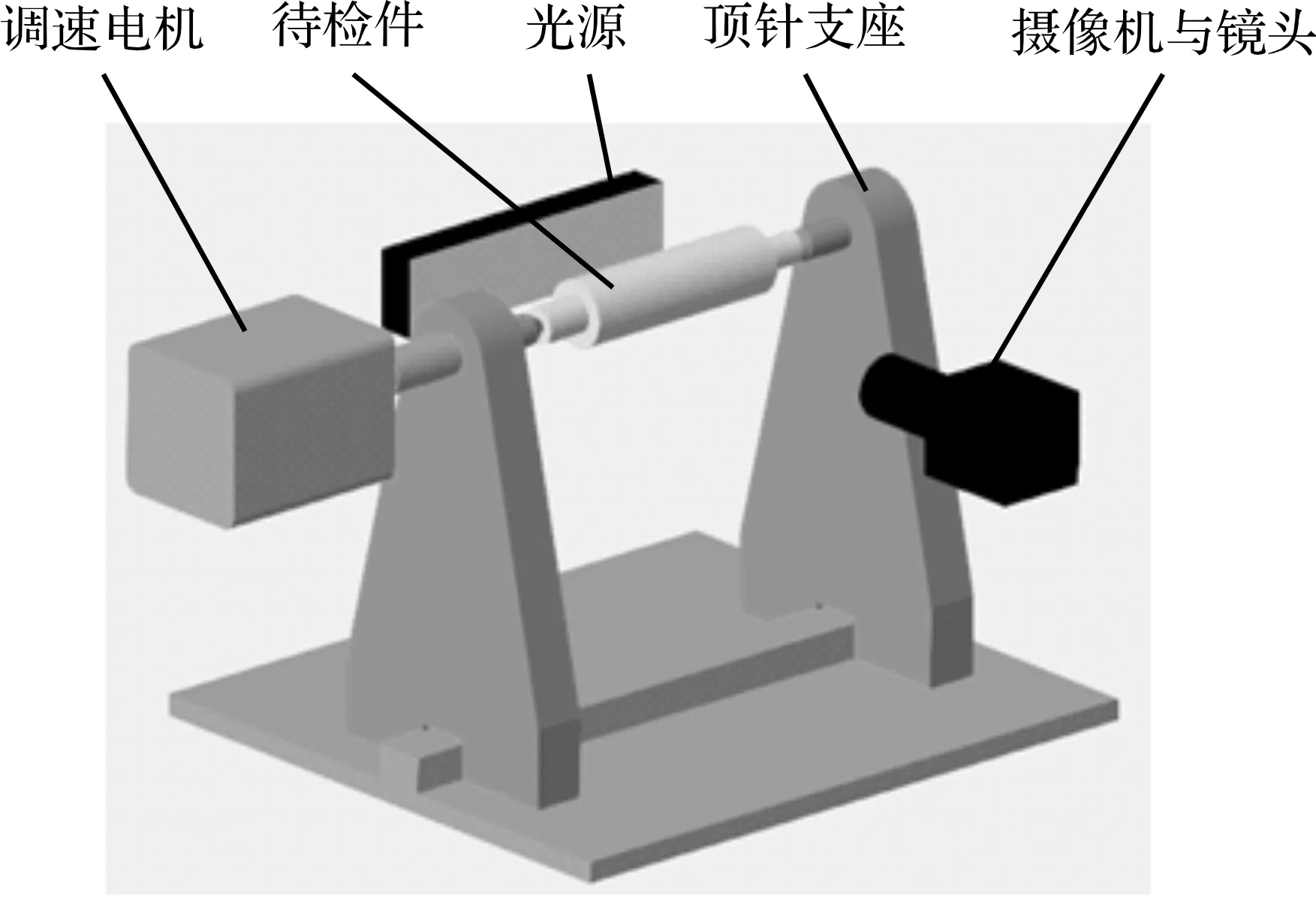
图1 实验平台结构图Fig.1 Structure drawing of experimental platform

图2 实验平台Fig.2 Experimental platform

图3 源图像Fig.3 Original image
2 径向跳动公差检测程序算法设计
2.1 图像去噪
受工况等客观条件的影响,采集的源图像存在噪声信息,这些噪声通常会对特征提取造成干扰,因此首先要进行图像去噪[1]。中值滤波是一种保边缘的非线性图像平滑方法,能快速、有效和简单地抑制噪声[2],笔者采用中值滤波对源图像进行去噪处理。
中值滤波的效果依赖于两个要素:邻域的空间范围和中值计算中涉及的像素数[3]。二维的中值滤波可以表示为
(1)
式中:Yij为输出图像;Xij为源图像;A为窗口。
笔者选用窗口大小为3×3的中值滤波对待检工件源图像进行处理,消除噪声。
2.2 二值化处理
二值化处理是把完整的目标特征从背景中分割出来[4]。图像二值化处理既要保证质量,又要兼顾运算速度。图像二值化处理的方法较多,当图像主要由两个灰度值构成,且灰度分布均匀时,适合运用最大类间方差阈值法作分割处理[5-7]。待检件源图像基本由亮(背景)、黑(待检件)两类特征组成,因此选择最大类间方差法对中值处理后的图像作二值化处理,将图像分割为待检件(黑区域)与背景(白区域)两部分。二值化处理速度快、效果好,边缘信息无丢失、冗余,处理结果如图4所示。

图4 二值化处理Fig.4 Binary process
2.3 Roberts边缘检测
要测量回转零件的径向跳动,即测量回转零件截面圆的半径值,需要先选取有效的方法提取待检件素线边缘特征。Roberts算子是一种利用局部差分算子搜索边缘的交叉微分算子,边缘检测定位精度高、运算速度快,适合用来提取待检件边缘特征[8-9]。Roberts算子表达式为
(2)
式中:g(i,j)为输出图像;f(i,j)为具有整数像素坐标的输入图像。
采用Roberts算子提取待检件边缘特征,边缘清晰、连续,结果如图5所示,适合测量边缘上各点位置信息。
图5 边缘检测Fig.5 Edge detection
2.4 径向跳动误差检测
径向圆跳动公差是指在被测圆柱面的某一固定参考点上,在垂直于基准轴线的方向上,绕基准轴线旋转一周时允许指示器跳动的最大读数的差值[10-12]。实验平台检测程序系统工作过程:公差检测程序系统读取源图像,对图像作去噪处理、二值化处理和边缘特征提取;在边缘上定位某一固定参考点,测量该点Y坐标像素数值,Y与标定值的乘积即为长度单位的半径R,将第i幅图像参考点半径值记作Ri(i=1,2,…,n。n为待检件旋转一周,相机采集图像的幅数,n越大,检测结果越准确);比较Ri大小,得到半径最大值Rmax与最小值Rmin,Rmax与Rmin差值即为径向跳动误差W。系统将实测值W与径向跳动公差值T进行比较,判断产品的径向跳动误差是否合格。在程序检测前2幅图像时,先将第1幅图像R1设为Rmax,将第2幅图像的R2与R1进行比较,两者中大的记为Rmax,小的记为Rmin。检测、判断系统程序流程如图6所示。
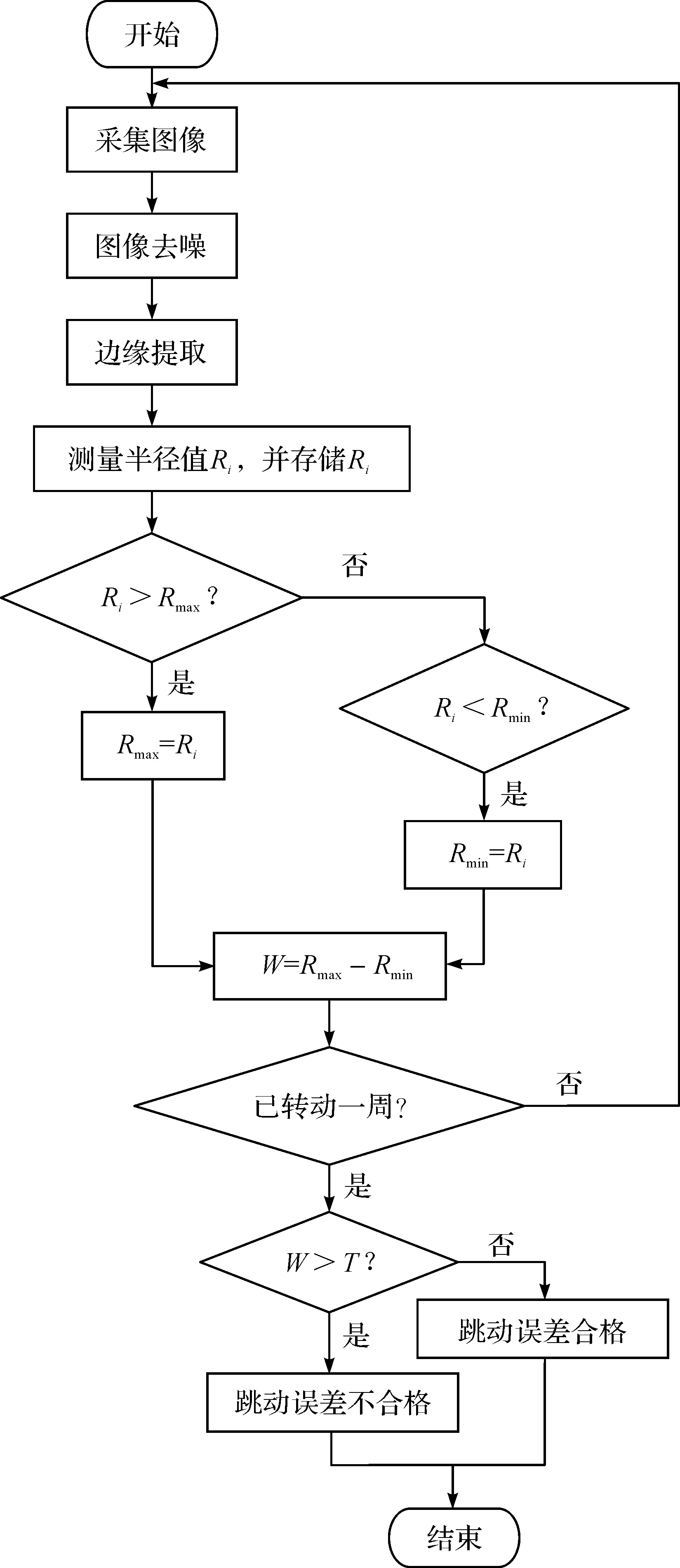
图6 检测流程图Fig.6 Detection flow chart
3 实验及结果
LabVIEW软件是一款高效的图形化设计软件,具有强大的图形显示能力,在实验或实践教学中的应用日趋广泛和多样。实验平台检测程序系统基于LabVIEW软件开发完成,径向圆跳动误差检测及结果如图7所示。在界面“公差值”里输入公差值(如0.1,实验零件粗车制作完成),点击左上角的运行箭头,系统开始检测。图7中竖直线为检测圆截面位置,可根据检测要求确定。界面同时显示提取的工件边缘曲线、检测点圆周径向跳动曲线以及圆周展开图,在圆周展开图中给出检测到的误差最大值。为了兼顾效率与准确性,待检回转体转过约0.2 mm弧长,相机即采集一幅图像。检测直径为4 mm的阀芯,系统采集频率为60幅/周,整个检测过程用时少于2 min。实验耗时短,图像展示结果形象,有助于学生对知识点的理解,课堂教学效果好。此外,适当增加截面圆数量还可检测径向全跳动误差,选取圆锥体截面圆也可检测斜向圆跳动误差。
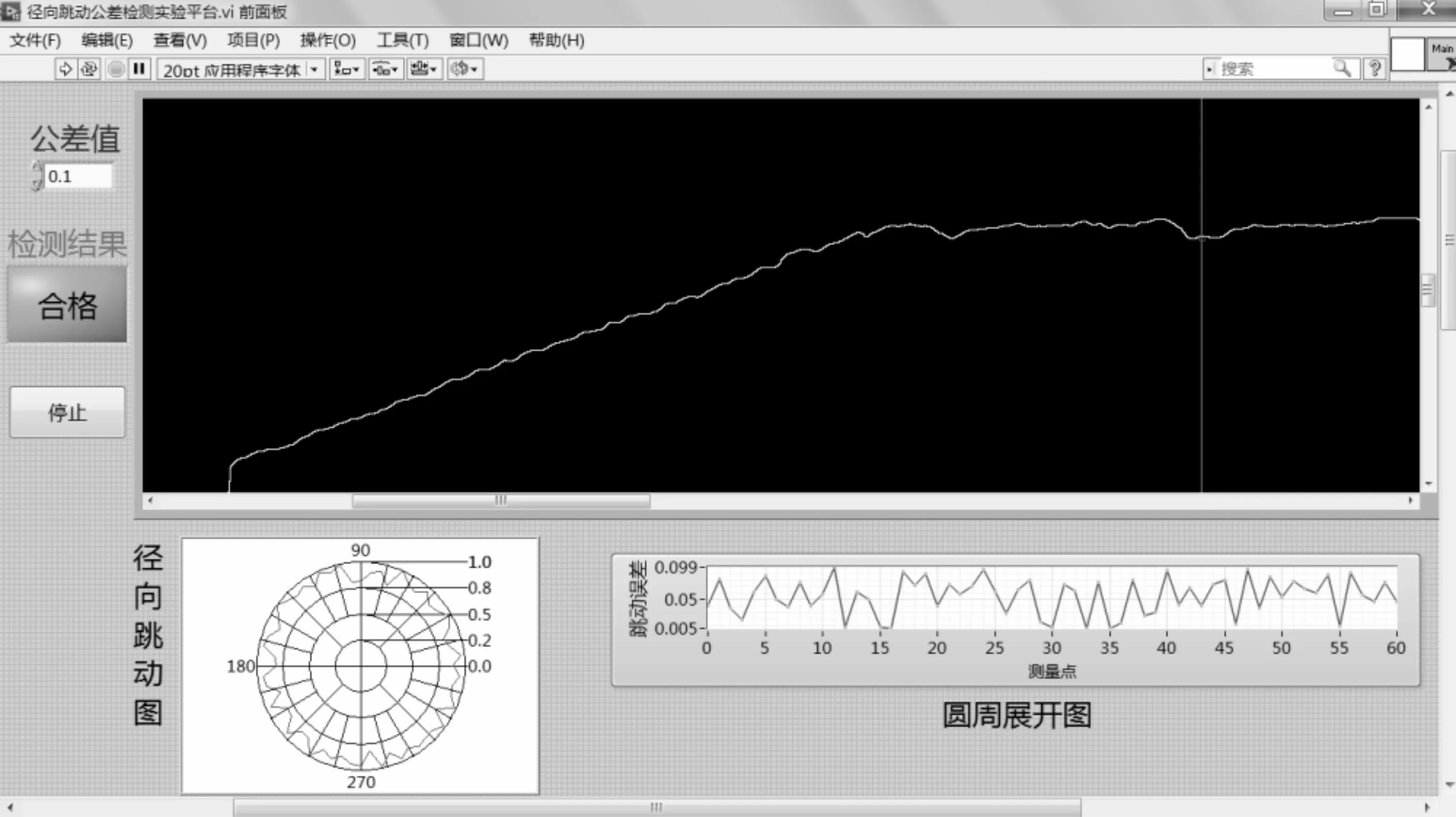
图7 径向圆跳动误差检测及结果Fig.7 Error detection and result for radial run-out
4 结 论
从课程教学的难点出发,设计了实验装置,结合计算机视觉技术与LabVIEW软件,开发了便捷式径向跳动公差实验平台。平台能实现回转体零件径向跳动误差的检测,使径向跳动公差的“教与学”由难变易,满足了教学与实验需求,使学生加深对概念的理解、提高学习兴趣。该实验平台尤其适合径向圆跳动、斜向圆跳动与径向全跳动公差实验,进一步开发还可用于圆度、圆柱度、素线、直线度及同轴度误差等实验。径向跳动公差检测实验平台是创新自制实验设备,是学以致用的实践,对实验教学改革、大学生创新能力的培养起到积极作用。
猜你喜欢
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
学生天地(2020年17期)2020-08-25
重型机械(2020年3期)2020-08-24
农村青少年科学探究(2020年4期)2020-06-24
数学年刊A辑(中文版)(2019年3期)2019-10-08
红领巾·探索(2018年11期)2018-12-10
综合智慧能源(2017年10期)2017-01-18
综合智慧能源(2016年1期)2016-02-03
太空探索(2014年3期)2014-07-10
