
三维激光扫描仪的精度评价分析
2023-02-02 09:18李振国
浙江工业大学学报 2023年1期
李振国,王 林,韦 征,张 豪
(1.浙江交工集团股份有限公司,浙江 杭州 310051;2.浙江工业大学 土木工程学院,浙江 杭州 310023;3.浙江省交通工程管理中心,浙江 杭州 310005;4.东南大学 土木工程学院,江苏 南京 211189)
近些年来,隧道建设或运营过程中的塌方事故常有发生,隧道施工阶段的断面检测和监控量测是保障隧道安全施工及运营的关键。三维激光扫描仪技术作为一门新兴的测量技术,被誉为继GPS之后的又一次测绘技术革命,相较于传统测量技术(全站仪、GPS和近景摄影测量技术等)的单点坐标采集,该技术可全面快速获取目标物的三维空间信息,读取目标物表面的三维坐标,实现点测量到面测量的转换,为构建三维全景隧道样貌提供了全新的技术手段[1-5]。与传统测量技术相比,三维激光扫描仪的优势主要体现在非接触式测量、数据量多且全面、工作效率高以及受工作环境影响较小等方面[6]。
作为测绘仪器,三维激光扫描仪在出厂时都有标称精度,然而该精度是在理想环境下测得的,在实际使用中是否能达到标称精度往往难以确定,因此需要对扫描仪的实测精度有一个系统的认识和评价[7-8]。笔者从测距、测角、入射角和竖向变形位移4个方面来分析三维激光扫描仪的实测精度,对三维激光扫描仪用于隧道施工中断面检测和监控量测进行评价。
1 仪器选择
目前三维激光扫描仪的品牌众多,各项指标各有区别,应用目的不同,仪器精度侧重点各有不同,这也为实际工程提供了选择的方向。笔者对比了3台扫描仪的型号参数,具体如表1所示。

表1 三维激光扫描仪参数对比Table 1 Comparison of 3D laser scanner parameters
从表1中可以看出:Trimble SX10具备较高的扫描速度,能够提升工作效率,且测距和测角精度都很高,并有着600 m的扫描距离,更适用于隧道工程中。因此,本研究选用如图1所示的Trimble SX10三维激光扫描仪作为试验仪器。

图1 Trimble SX10三维激光扫描仪Fig.1 3D laser scanner Trimble SX10
2 三维激光精度试验仪器和方法
影响三维激光扫描仪测量精度的误差主要来源于3个方面:扫描仪仪器本身的误差(仪器误差)、外界环境引起的误差(环境误差)和由被测目标物引起的误差(反射面误差)[9]。仪器误差是三维激光扫描仪所测点云数据精度的主要误差来源,其中测距和测角是影响精度的两个主要因素;环境误差可通过保证试验环境的温度和气压稳定来降低;在实际隧道工程中,同一隧道中围岩的粗糙程度一致,反射面误差可忽略不计[10]。
2.1 测距试验
测距精度检验采用6段解析法[11],通过全组合方式获得21段测量数据,利用间接平差原理求得加常数和测距标准偏差值,进而修正全站仪的实测值,并将三维激光扫描仪测得的结果与全站仪修正后的测距值进行比较,校验扫描仪的测距精度。按图2所示进行布设,X=5 m,Y=10 m,试验测得的21段距离值如表2所示。

图2 测距精度试验布设图Fig.2 Layout of the ranging accuracy test
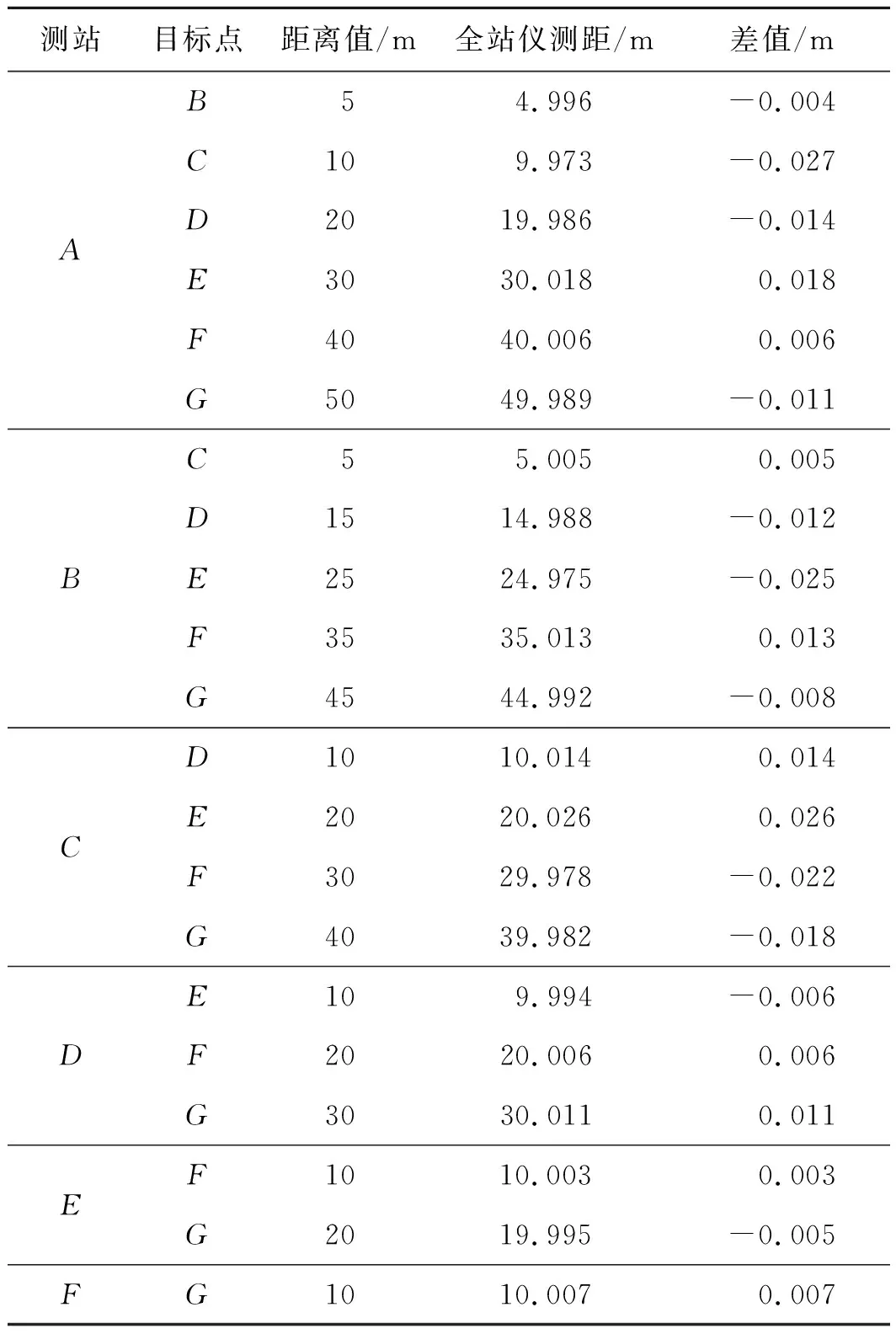
表2 全站仪全组合测距值及差值Table 2 Total station range measurement values and difference values
2.2 测角试验

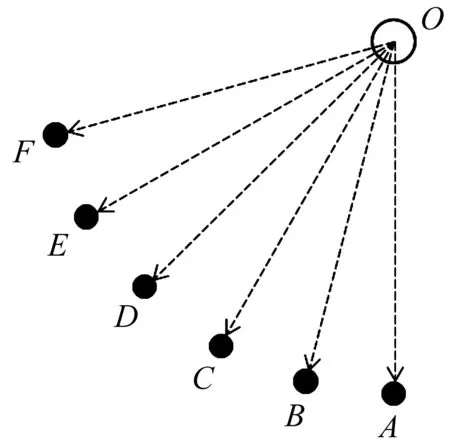
图3 测角精度试验图Fig.3 Test diagram of angle measurement accuracy
2.3 入射角试验

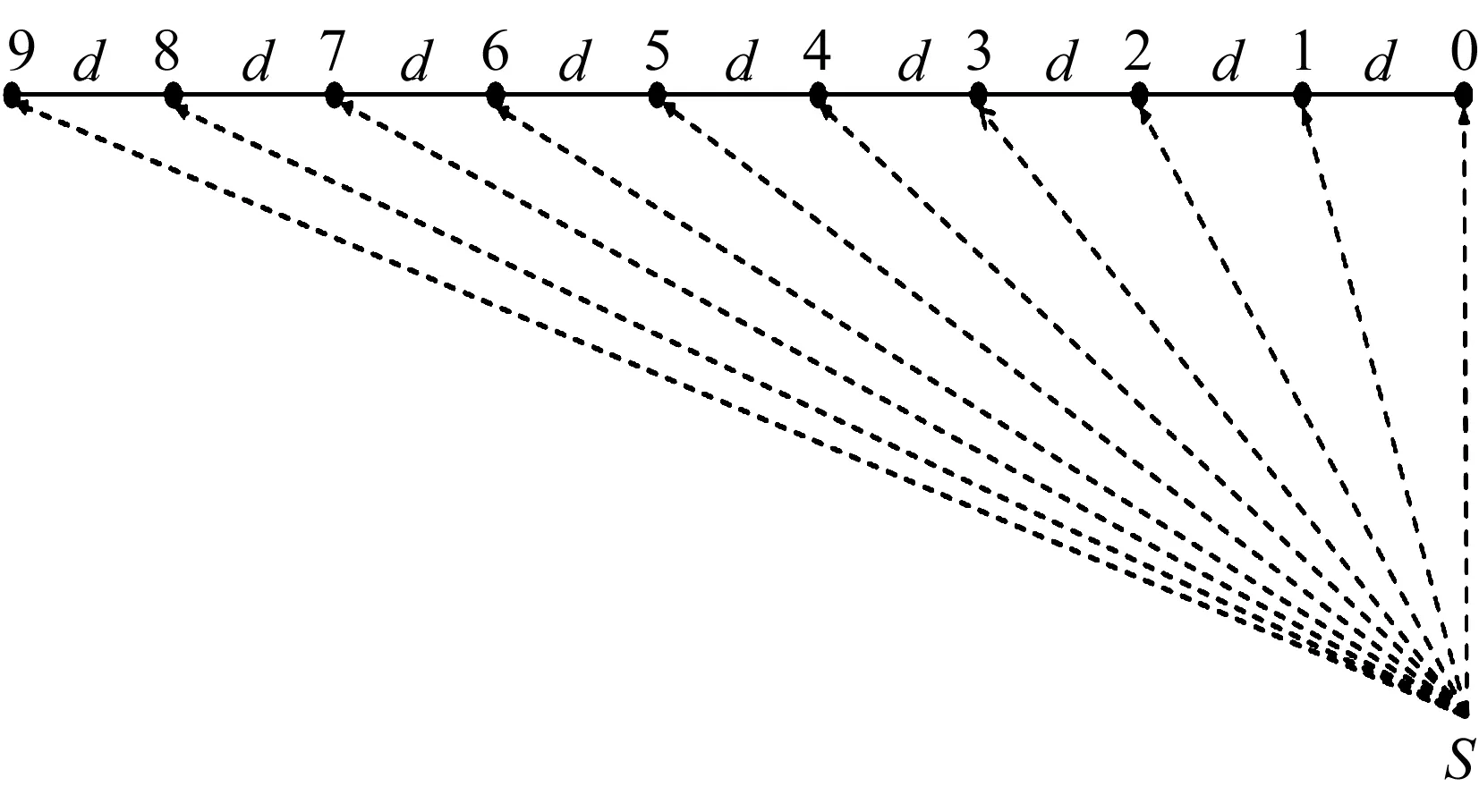
图4 入射角试验图Fig.4 Test diagram of incident angle
2.4 竖向变形位移试验
由于隧道初期支护的混凝土一直受围岩的作用力,三维激光扫描仪的初衬会一直处于受力状态。在受力状态下的实际变形位移与扫描仪监测的变形位移是否一致值得分析研究。笔者主要通过两组试验分析受力前后的位移变形,以百分表的位移变形值为基准。第1组通过固定入射角,分析不同测量距离下受力前后的变形位移情况;第2组通过固定测量距离,分析在给定距离下受力前后的位移变化情况。试验设计如图5所示,试验步骤如下:1) 混凝土试块加载前,扫描仪架设在某一站点扫描反射片,即为变形前点云数据,百分表读取加载前的初始读数;2) 在跨中加载混凝土试块,扫描仪在同一站点、同一高度下扫描反射片,即为变形后点云数据,百分表读取加载后的变形读数;3) 其他站点观测步骤同步骤1)和步骤2);4) 提取反射片的中心点坐标,计算扫描仪扫描前后的位移变化值,同时计算百分表在每个站点处的变化值。

图5 竖向变形试验示意图Fig.5 Schematic diagram of vertical deformation experiment
3 结果分析和讨论
3.1 测距对精度的影响
利用MATLAB软件解算出全站仪测距值的加常数0.001 6和标准偏差值(0.001 8 0.008 60.009 3 0.004 3 0.007 0 0.010 8)T,将解算得到的标准偏差值对全站仪(思拓力R2,2 mm+2 pm,1″)测距值进行修正,得到标准参考值。将三维激光扫描仪测得的距离值与标准参考值进行比较,站点A的比较结果如表3所示。
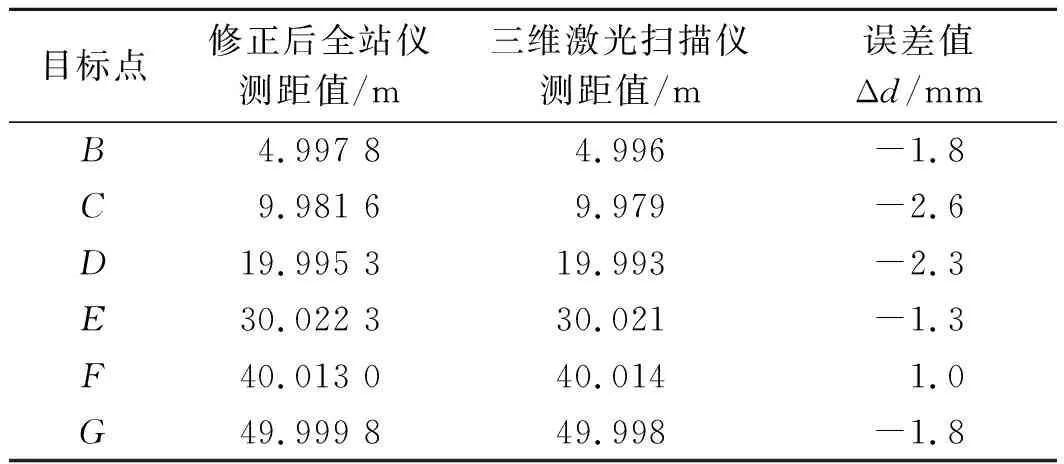
表3 扫描仪测距值与标准参考值比较表Table 3 Comparison table of scanner ranging values and standard reference values
根据表3中的误差值计算出测距的均方根误差值σ。计算得到均方根误差值σ=1.88 mm,该测距精度小于扫描仪的标称精度2 mm,满足扫描测距精度。σ计算式为
(1)
式中:i为第i个测段;n为测段数。
3.2 测角对精度的影响
根据试验设计,记录三维激光扫描仪提取的测角值与全站仪测得的测角值,测站O点的测量结果如表4所示。
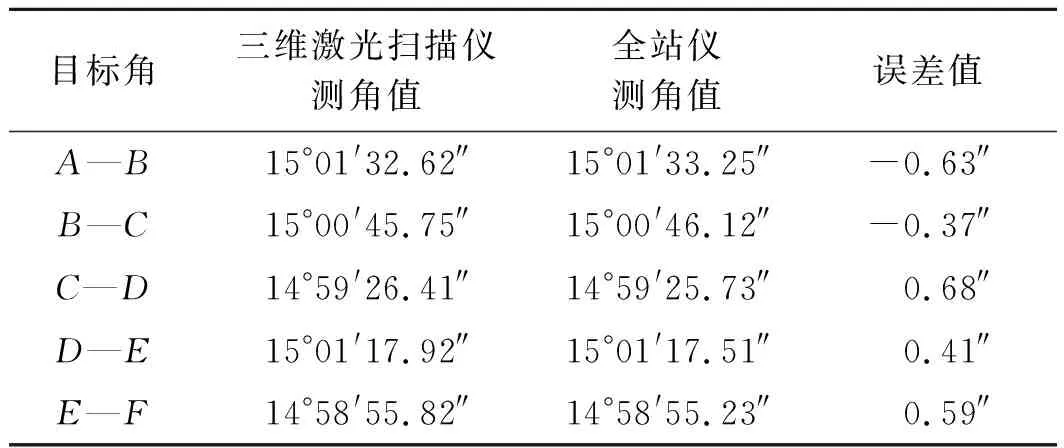
表4 全站仪与扫描仪的测角比较值Table 4 Angle measurement comparison values of total station and scanner
从表4中可以看出:全站仪测角值与扫描仪测角值的误差绝对值小于1″,满足扫描仪的测角精度,对测量结果的影响较小,故角度测量值是可靠的。
3.3 入射角对精度的影响
根据试验设计,记录三维激光扫描仪到发射片的入射角与每个反射片上全站仪和扫描仪所测的中心坐标差值ΔD,结果如表5所示。
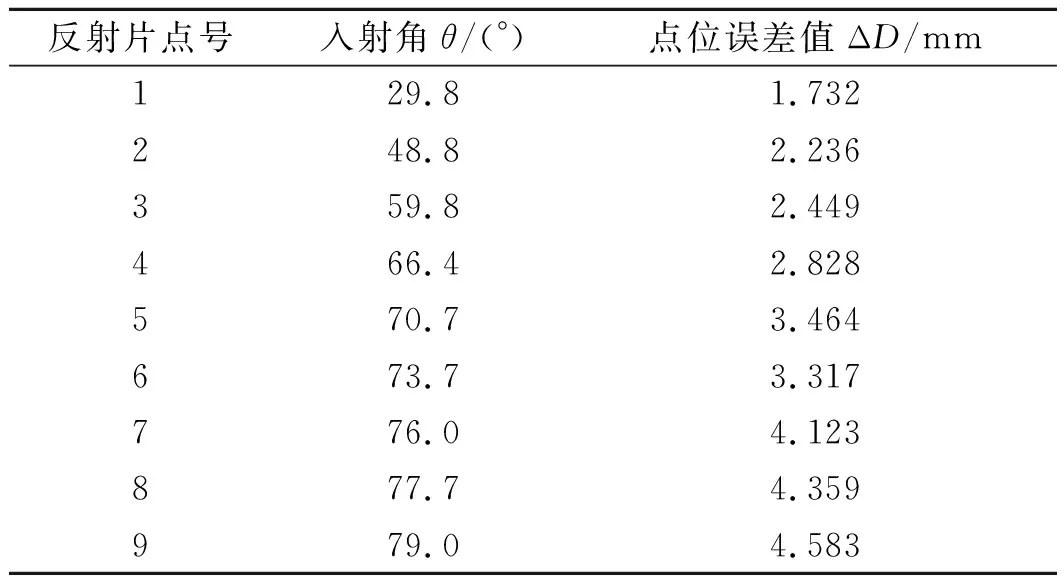
表5 不同入射角度的误差值Table 5 Error values of different incident angles
不同入射角下的点位误差值如图6所示。从图6中可以看出:随着入射角的增加,点位误差值呈现增大的趋势,同时也显著影响点云精度;当入射角超过73.7°后,点位误差值变化幅度明显增加;当入射角不超过70.7°时,点位误差值小于3.5 mm。
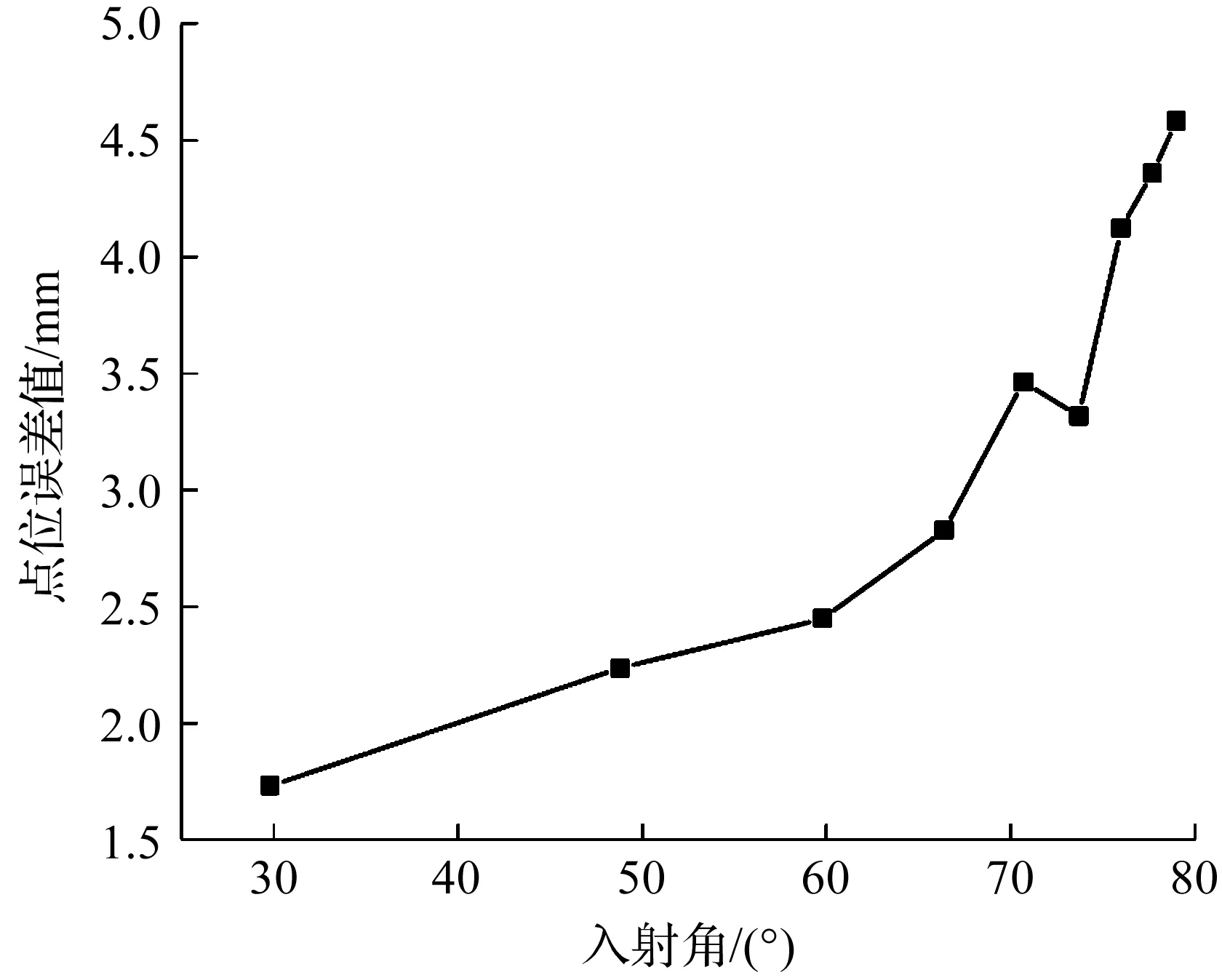
图6 不同入射角下的点位误差值Fig.6 Point position error values under different incident angles
3.4 竖向变形对精度的影响
根据试验设计,记录受力前后百分表的变形值与三维激光扫描仪监测到的竖向位移变化值。第1,2组试验结果分别如表6,7所示。
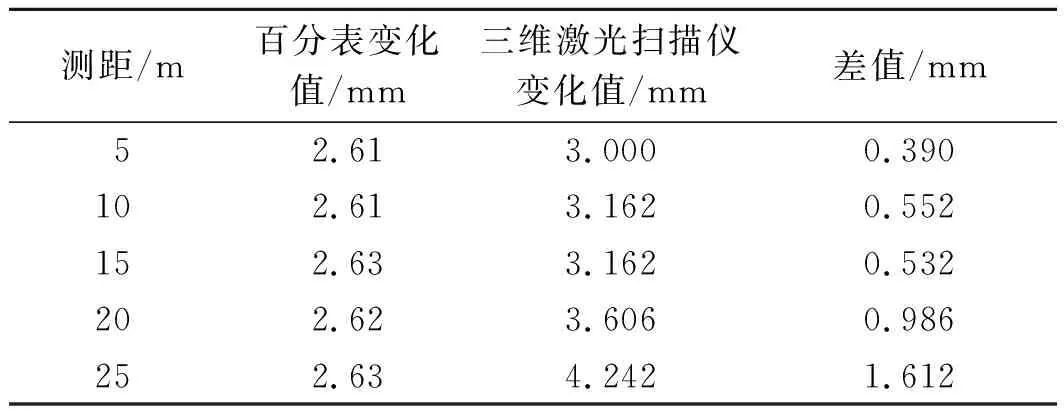
表6 同入射角下三维激光监测变形值与百分表变化值比较表Table 6 Comparison table of the deformation values of the three- dimensional laser monitoring and the change values of the dial indicator under the same incident angle
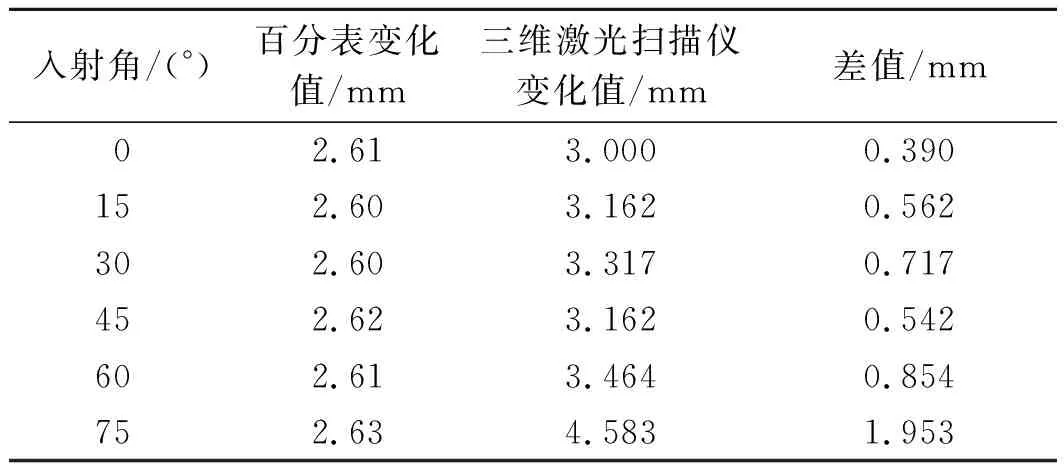
表7 等测距下三维激光监测变形值与百分表变化值比较表Table 7 Comparison table of the deformation values of the three- dimensional laser monitoring and the change values of the dial indicator under the same distance measurement
同入射角下三维激光扫描仪和百分表比较值与测距的关系图如图7所示,同测距下三维激光扫描仪和百分表比较值与入射角的关系如图8所示。从图7,8可以看出:当测距在20 m以内以及入射角在60°以内时,百分表和三维激光扫描仪的误差绝对值不超过1 mm。当三维激光扫描仪应用到隧道的变形监控量测时,建议现场使用过程中扫描小范围测程,以满足隧道变形监控量测精度0.5~1.0 mm的要求。
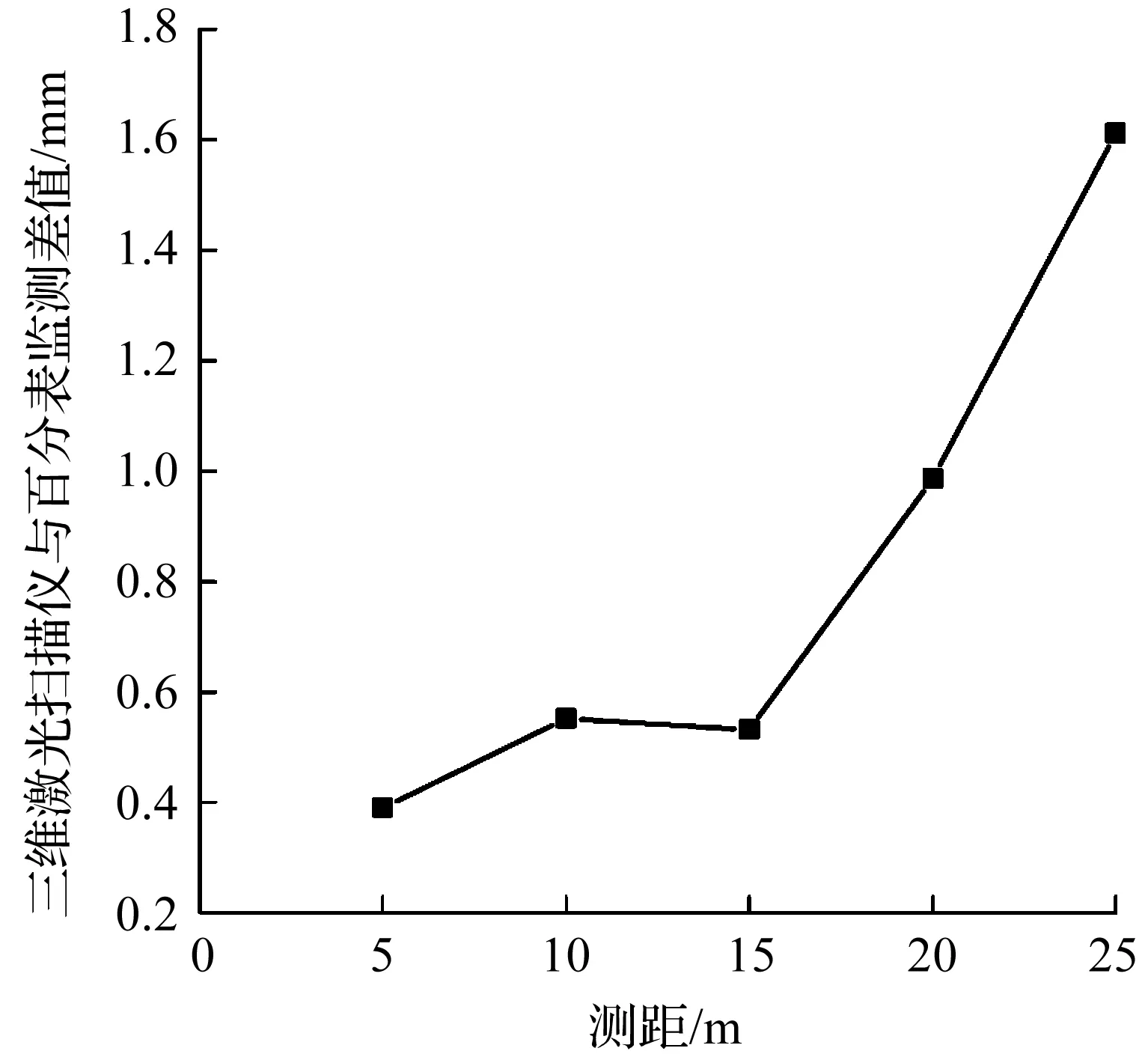
图7 同入射角下三维激光扫描仪和百分表比较值与测距的关系图Fig.7 The relationship between the comparison values of the three- dimensional laser scanner and the dial indicator and the distance measurement under the same incident angle
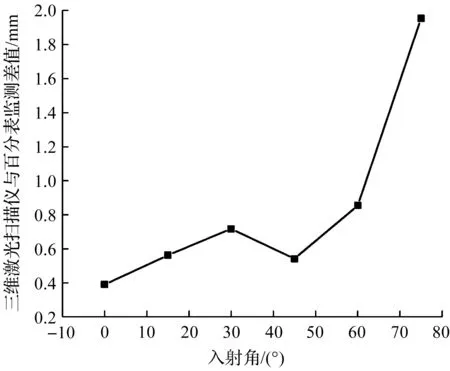
图8 同测距下三维激光扫描仪和百分表比较值与入射角的关系图Fig.8 The relationship between the comparison values of the three- dimensional laser scanner and the dial indicator and the incident angle under the same distance measurement
4 结 论
根据上述试验和分析可得以下结论:1) 在实际工作中,仪器的测距、测角精度达到了标称精度,随着距离的增长,测距精度呈下降趋势;2) 随着入射角的增加,误差值显著增大,点位精度降低,当入射角不超过70.7°时,点位误差值小于3.5 mm;3) 在测距20 m内和入射角60°内,点位竖向变形误差绝对值不超过1 mm,可应用到小范围测程的隧道监控量测中。故三维激光扫描仪在实际工作环境下可以达到标称精度,将该仪器应用到隧道施工过程的断面检测和监控量测中具有可行性,测量结果可靠。考虑到隧道施工环境复杂多样,建议扫描仪在少粉尘、少人员走动和少台车的环境下进行工作,以减少扫描误差。
猜你喜欢
大众标准化(2022年17期)2022-09-27
中学数学研究(广东)(2019年12期)2019-07-18
模具制造(2019年3期)2019-06-06
弹箭与制导学报(2018年3期)2018-08-28
石油地球物理勘探(2017年2期)2017-11-23
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
质量技术监督研究(2015年5期)2015-02-10
时代农机(2014年11期)2014-09-23
现代营销·经营版(2013年5期)2013-05-14
