基于磁流变阻尼器的半主动悬架研究
2023-01-31 02:12李强飞
汽车实用技术 2023年1期
李强飞
(长安大学 汽车学院,陕西 西安 710064)
相比于乘用车,商用车运行工况更为恶劣,商用车行驶平顺性成为研究热点。其中可控智能悬架是提升商用车平顺性的主要途径,根据悬架参数可调性,可控智能悬架分为主动悬架与半主动悬架。由于商用车运行工况多变,传统被动悬架无法保证在任意工况下,悬架都拥有最佳减振性能。而可控悬架可结合实时工况调节悬架参数,确保任意时刻汽车具有最佳平顺性和行驶安全性[1-2]。
半主动悬架不需要增加额外的作动器,能耗更小,市场应用前景广泛,本文提出一种基于磁流变半主动悬架的商用车平顺性优化方法。
1 设计原理
磁流变液(Magneto-Rheological Fluid, MRF)是一种由非导磁性液体和均匀分散于其中的高磁导率微小磁性颗粒组成的新型智能材料,MRF是产生磁流变效应的物质载体。在无外加磁场条件下,磁粒分子分布和运动状态是随机的,其迁徙和转动只受热运动影响,而当外加磁场强度时,则会产生磁流变效应,粒子相互靠近有序排列,随着磁场强度增加有序相联,最后以长链为核心吸收短链形成固态相,最终实现MRF流动性与粘性变化的特点。通过改变磁场来改变MRF流动性与粘性间接改变阻尼器结构参数,从而为半主动悬架结构设计提供基本依据[3]。
2 结构设计与优化
2.1 磁流变阻尼器结构
本文提出的磁流变阻尼器结构如图 1所示,其中设置有双线圈活塞,由于磁流变阻尼器为有杆腔活塞。因此,设置有一个补偿腔,一个补偿阀,一个浮动活塞来平衡阻尼器内部压力。活塞电源线分布于活塞杆内部,为活塞线圈提供电源,通过控制活塞线圈电流大小来控制磁场大小,最终实现阻尼器阻尼力大小可控,结构示意图如图1所示。

图1 磁流变阻尼器基本结构
本研究选用 MRF21322型磁流变体。根据磁流变效应的工作模式主要分为剪切,流动,挤压三种模式,分别如图 2所示。由于挤压模式所提供的的阻尼力与行程有限,而商用重型载货车需要大阻尼大行程,因此,本研究采用流动模式与剪切模式的混合模式进行集成应用。

图2 磁流变效应工作模式示意图
2.2 新型磁流变阻尼器阻尼力计算
MRF力学模型主要有 Sigmoid模型以及Bingham粘塑性模型等。本研究采用Bingham磁流变模型,其将阻尼器分为了两个力学模块元件,其中第一项是关于速度的动摩擦力,第二项是关于场强的磁流变粘滞力。结合Bingham磁流变模型分别建立拉伸与压缩状态下阻尼力计算公式,拉伸状态下阻尼力计算公式[4]为

压缩状态下阻尼器阻尼力计算公式为

式中,F1为摩擦黏滞力;F2为库伦力;η为磁流变液体的零场粘度;L1与L2为磁极宽度;AP1,AP2,AP3为活塞面积;h1与h2为阻尼通道宽度;D为活塞外径;τy为磁流变液的剪切屈服强度;v为相对速度,b1,b2为磁场间隙距离。
混合模式下的磁流变阻尼器的最小阻尼力为零磁场下的粘滞力,通过调节励磁电流大小进行磁场强度大小调节,实现最大阻尼力控制,并定义间隙比为Q=h/D。分析可知动力调节倍数与间隙比有关,因此,可以设计相应的间隙比来设定阻尼力调节范围。取整车结构参数为,空载质量为12 500 kg,满载质量为25 000 kg,前桥负荷比为45%,簧下总质量为2 600 kg,结合汽车整车参数与性能分析,初选阻尼通道间隙比为 0.04,阻尼通道间隙宽度为2 mm。其次对磁场结构参数进行设计,选用铜线尺寸为0.6 mm,根据电磁场基本规律,选用功率为3 kW,最大电流为3 A,根据估算活塞线圈数为84.8,取整为85,将活塞缠绕六层,每层4圈,共84圈,计算单级阻尼通道为36.8 mm。
2.3 磁流变阻尼器结构优化
Ansoft Maxwell是一种电磁场分析软件。因磁路在任何一处磁通达到饱和,将进一步影响整个磁路磁场增强。磁流变阻尼器设计中应遵守两点优化原则,首先避免磁芯局部区域处出现提前磁饱和;其次保证阻尼通道区域磁流变液充分磁饱和,充分发挥磁流变效应[5]。结合基本结构设计,采用有限元分析软件Ansoft Maxwell对磁流变阻尼器结构参数进行优化。根据基础设计范围,选取系列磁芯半径参数进行有限元仿真。首先进入Ansoft Maxwell 2D建立界面,设置完毕后选择magnetostatic静态磁场求解器、Master/Slave边界条件,进行网格划分设置求解参数并执行 Maxwell 2D/Validation check,对模型进行检测,检测后启动仿真。仿真结果如图 3所示,其为磁流变阻尼器磁路磁感应强度云图,从图中可得到最高磁密为2.5 T,位于活塞上下两端面,磁路各区域的饱和磁感应强度均在材料的最大饱和磁感应强度范围之内,没有过饱和,磁路设计合理,可得半径为11 mm能满足优化原则。

图3 磁芯半径为11 mm的磁路模型有限元分析
3 控制策略设计
模糊控制是一种具有人工智能特征的不依赖精确数学模型,适用于时变系统的智能控制方法;所谓模糊PID控制是以偏差e及偏差的变化ec为输入,利用模糊控制规则在线对 PID参数进行调整,以满足不同的偏差e和偏差的增量ec对PID参数的不同要求。由于磁流变悬架系统结构复杂,工况多变,其所受的被迫振动具有非线性与时变性,本研究采用模糊控制与 PID控制相结合的方法。
本研究输入变量为车辆悬挂位置簧载质量的垂向速度偏差,与簧载质量加速度偏差,模糊论域设为[-3,-2,-1,0,1,2,3]七个语言参量,分别为负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)。由此获得 kp,ki,kd的模糊控制规则表,如表 1所示。输出变量分别为对 PID控制器积分系数、比例系数、微分系数的调整量。PID控制器的输入变量是模糊控制器的输出变量,输出变量为期望控制力。输入输出变量均采用三角形隶属度函数,模糊推理采用Mamdani法。模糊控制的控制规则一般为动态的,如果偏差数值较小,可适量降低kp与ki值,避免系统超调,提升系统对的稳定性,而当出现偏差较大时,通过提升kp与ki值可以尽快消除偏差,提高系统鲁棒性。

表1 kp/ki/kd间的模糊控制规则表
4 车辆悬架系统动力学仿真
根据上述整车参数与设定控制策略,对某商用车 1/2平面模型进行性能仿真分析,其中利用Matlab/Simulink仿真软件进行响应的仿真分析,振动冲击的描述方法采用滤波白噪声进行描述分析,对路面激励进行输入,输入时选取车辆经常行驶的B级路面参数作为模型输入。
为了直观观测优化效果,分别建立传统被动悬架与模糊 PID磁流变阻尼器半主动悬架仿真模型,如图4所示。图5给出了两者簧载质量运动加速度大小随时间变化的关系曲线图,可得出同等大小激励,半主动悬架拥有较小的簧载质量加速度。图 6给出了车轮与路面之间的动载随时间的变化关系曲线。分析可得,受到同等程度大小的路面冲击时,本研究所设计的半主动悬架相比于被动悬架,相对动载数值更小,因而拥有更好的舒适性,汽车亦拥有更好的安全性。受到同等程度大小的路面冲击时,本研究所设计的半主动悬架相比于被动悬架,平顺性更好,相对动载更小,拥有更好的舒适性与行驶安全性。
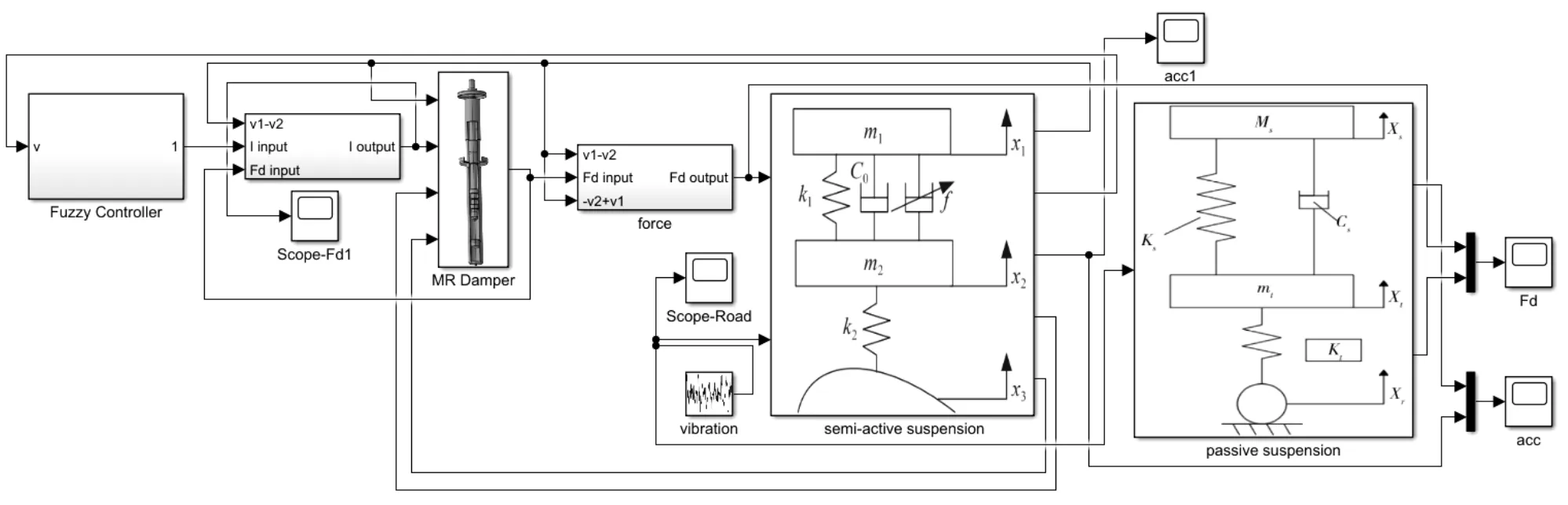
图4 磁流变模糊PID半主动悬架系统仿真模型

图5 半主动悬架与被动悬架簧载质量加速度大小

图6 半主动悬架与被动悬架车轮与路面动载大小
5 结束语
本研究设计了一种新型的磁流变半主动电控悬架,首先对基础结构进行设计,采用有限元分析软件Ansoft在一定区间中对结构进行优化,其次采用模糊控制与PID控制相结合的控制策略,对磁流变阻尼器输出特性进行控制,采用Matlab/Simulink进行了振动特性性能仿真,从分析可以看出,本研究设计的磁流变半主动悬架能够使得车辆拥有良好的隔振特性,当簧载质量受到所设置的B级路面激励振动时,簧载质量加速度数值与相对动载数值更小,具有良好的平顺性与舒适性,能够极大地降低相对动载,使得汽车行驶安全性也得到极大改善。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
施工技术(中英文)(2022年9期)2022-06-21
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
装备制造技术(2020年11期)2021-01-26
北京理工大学学报(2020年11期)2020-12-15
汽车工程学报(2015年6期)2016-03-23
太原理工大学学报(2015年3期)2015-12-17
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
噪声与振动控制(2015年4期)2015-01-01