
基于Halcon的单目相机标定方法与测量实验
2023-01-30 07:32李晓晓孙付春吴昊荣
技术与市场 2023年1期
李晓晓,杨 涛,雷 进,孙付春,吴昊荣
(1.成都大学机械工程学院,四川 成都 610106;2.成都农业科技职业学院机电信息学院,四川 成都 611130;3.成都大学电子信息与电信工程学院,四川 成都 610106)
0 引言
在自动化生产过程中,机器视觉广泛地应用于尺寸测量、工况监控和缺陷检测等领域[1-2]。相机标定直接影响视觉测量结果的精准性[3]。基于机器视觉在智能制造测量领域的广泛应用,越来越多的从业人员开始在标定方面进行研究。张梦洋[4]针对单目相机,利用遗传算法对相机内参优化求解,获得更加精确的相机内参,该方法在精度上优于张正友法,但实时性较差。田少兵等[5]利用改进粒子群算法进行相机内参标定,相机内参准确性更高,收敛速度更快。覃兴胜等[6]针对激光雷达三维目标识别采用棋盘格板定板提出一种标定外参的标定方法,提高了现行外参标定法的精度。赫美琳等[7]和赖文敬等[8]针对棋盘格板定板提出了一种快速获取单目相机内部参数的标定方法,其中赖文敬提出的方法对高精度相机内参获取更为有效。考虑到圆点标定板在相机标定中也得到相当多的应用,利用机器视觉商业软件Halcon对原点标定板进行相机标定研究,探索圆点标定板图像数量对相机参数的影响及验证圆点标定板的标定精度是十分有意义的。
1 单目视觉系统实验平台搭建
视觉系统由工业相机、镜头、照明光源、标定板、工作平台及相关软件等组成,单目视觉系统指的是系统中只使用了一个相机。图1是为案例搭建的单目视觉测量系统,可用来进行缺陷检测和尺寸测量等实验。利用视觉系统进行视觉标定或测量实验时,通过光源控制器根据工业环境需求调整光源。
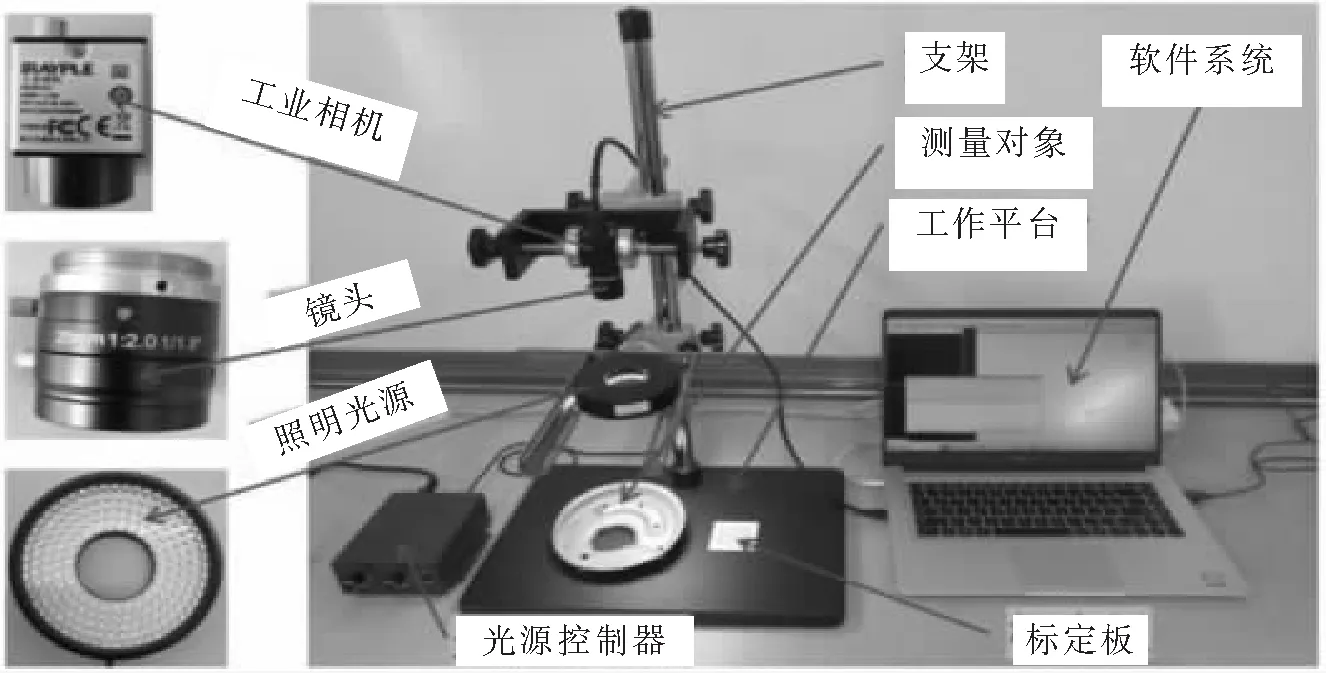
图1 单目视觉测量系统实验平台
2 单目视觉系统标定工作原理
相机成像依据的是小孔成像原理,由图像像素坐标转换为空间坐标实质是一个坐标系转换过程。在像素距离与实际距离的转换过程中,涉及相机的内部参数和外部参数,相机标定的目的在于获取相机内部参数和外部参数。
2.1 机器视觉坐标系
标定过程实质是机器视觉坐标系的转换。机器视觉涉及世界坐标系、相机坐标系、图像物理坐标系和像素坐标系。机器视觉4个坐标系间的关系[6]见图2。
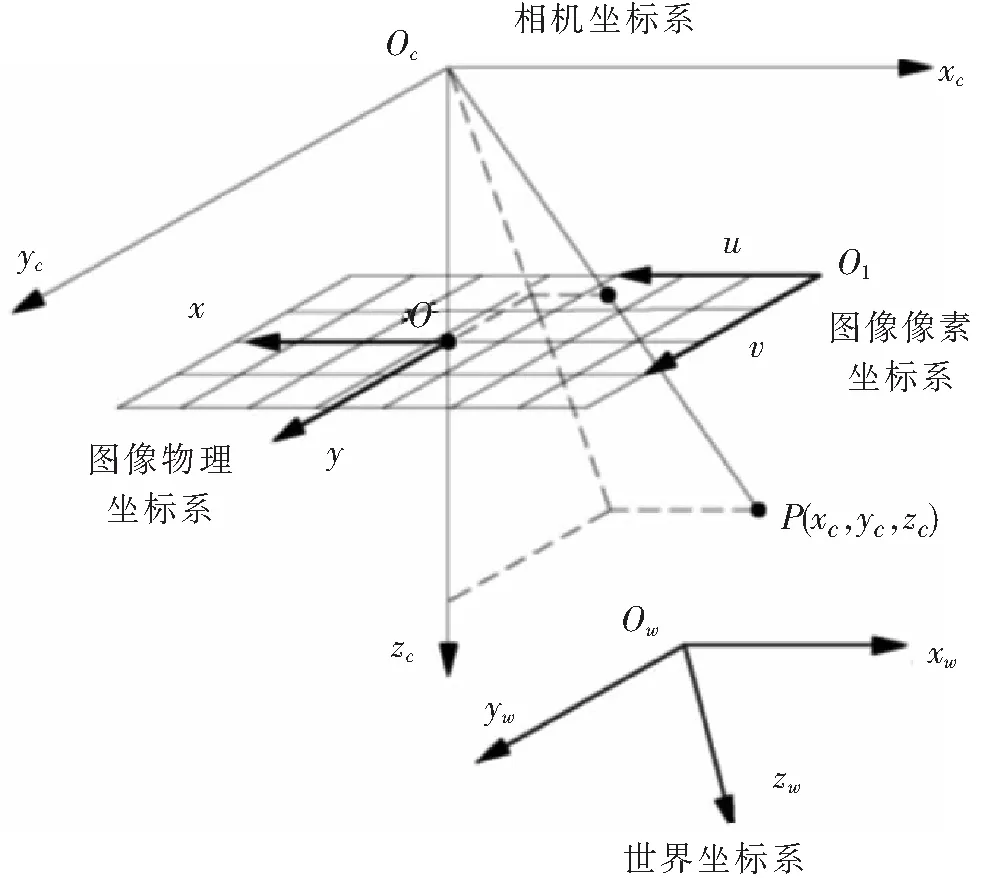
图2 机器视觉坐标系空间关系
1)像素坐标系(O1-uν):以像平面左上角顶点为坐标系原点,从左往右为u轴正方向,从上往下为ν轴正方向,单位为像素。
2)图像物理坐标系(O-xy):以像平面横纵坐标中点为坐标原点O,x轴与u轴平行,y轴与ν轴平行,单位为mm。
3)相机坐标系(Oc-xcyczc):原点Oc位于镜头光心处,xc轴与yc轴分别与像面两边平行,zc轴为镜头光轴。
4)世界坐标系(Ow-xwywzw):用于描述待测物体在三维世界中的位置,可根据实际需求确定坐标原点。
2.2 机器视觉坐标系转换
假设在世界中存在一点,其世界坐标为(xw,yw,zw,1),相机坐标为(xc,yc,zc,1)。该点世界坐标系和相机坐标系的转化是通过旋转R和平移T两个过程完成的,则:
(1)
式中:R=R(γ)R(δ)R(θ),为3×3旋转矩阵;T=T(xt,yt,zt),为3×1平移矩阵,xt,yt,zt的数值分别为世界坐标系和相机坐标系原点之间的差值;γ,θ,δ分别为世界坐标系(Ow-xwywzw)向相机坐标系(Oc-xcyczc)转换过程中绕xw轴、yw轴、zw轴旋转的角度,故而有:
相机坐标系中的点投影到图像物理坐标系中,可用式(2)表示:
(2)
式中:焦距f表示焦点到镜头中心OcO距离。像素坐标系(O1-uν)和图像坐标系(O-xy)之间关系如式(3):
(3)
结合公式(1)~(3),三维空间中任一点的世界坐标与像素坐标关系有:
(4)

相机外参中,R=R(γ)R(δ)R(θ),R(γ)、R(δ)、R(θ)为3个分别与γ,θ,δ相关的独立参数;T=T(xt,yt,zt),xt,yt,zt也为3个独立参数。故相机外参共含有6个参数,且可表示为x平移、y平移、z平移、x旋转、y旋转、z旋转。同时在面阵相机(division)模式中,其内参表示为:Focus、Kappa、Sx、Sy、Cx、Cy、W、H,Focus为镜头焦距;Kappa为镜头畸变系数;Sx,Sy为单个像素宽和高;Cx,Cy为图像中心点坐标;W、H为图像的宽和高。即相机标定就是为了获得相机外参的x平移、y平移、z平移、x旋转、y旋转、z旋转6个参数,以及相机内参的Focus、Kappa、Sx、Sy、Cx、Cy、W、H 8个参数。
3 单目相机视觉标定方法
Halcon为德国MVtec公司开发的机器视觉软件,其自带相机标定助手,有助于快速精准实现相机参数标定。图3为利用Halcon软件的相机标定流程。

图3 相机标定流程
实验所用圆点标定板型号为GB050-2-7×7,如图4所示,由7×7的圆点阵列和一个带切角的边框组成,边框切角描述的是-x和-y的方向,每个圆点理论直径为2 mm,理论圆心距4 mm,精度±0.1 mm。

图4 相机参数标定用标定板
3.1 利用Halcon标定助手的相机标定过程
采用Halcon标定助手的具体操作步骤如下。
1)生成标定板描述文件。在桌面建立命名为“50-38”的文件夹,在程序窗口运行代码:gen_caltab(7,7,0.004,0.5,′C:/Users/Desktop/50-38/caltab50-38.descr′,′C:/Users/Desktop/50-38/caltab50-38.ps′),运行该行代码后,在文件夹“50-38”内会生成文件名为“caltab50-38.descr”的标定板描述文件。
2)安装标定板描述文件,初步设置相机参数。在“安装”标题栏下,加载“50-38”文件夹内的标定板“描述文件”,即文件名为“caltab50-38.descr”的文件。摄像机模型默认“面扫描(多项式)”,通过相机厂家提供的产品说明书提供的相机参数,设置单个像元尺寸的宽和高为1.85 μm×1.85 μm,焦距25 mm。在标定助手中安装好的“描述文件”和设置的摄像机参数如图5所示。

图5 标定板图像采集
3)加载标定板图像,完成相机标定。单击“标定”标签,相机标定需要的标定板图像可以通过事先采集好的图像文件导入,也可以利用“图像采集助手”实时采集。以利用“图像采集助手”实时采集方式为例,通过手动调整光源、相机光圈和镜头,界面中实时采集的标定板图像名称后的“状态”栏下会出现“特征提取失败”“检测出品质问题”“确定”3种状态。当出现“特征提取失败”提示时,表明该标定板图像特征提取失败,需要重新采集,其余2种状态则可以实现相机标定,但在“检测出品质问题”状态下标定结果精度略有不足。图5为本案例采集的27张标定板图像。
当所有的标定板图像特征提取成功后,还需要设置一个参考位姿。参考位姿要求靠近相机视野的中心,“01#”标定板图像为本案例参考位姿。单击“标定”按钮完成相机标定,获得相机标定结果。从标定结果可知:摄像机位姿态(也称相机外参)[x平移、x旋转、y平移、y旋转、z平移、z旋转]=[-0.632 341,359.215,0.857 009,0.747 602,329.119,359.356],摄像机参数(也称相机内参)[Focus、Kappa、Sx、Sy、Cx、Cy、W、H]=[25.000 5,-39.893,1.849 93,1.85,1 999.94,1 499.97,4 000,3 000],且标定后的平均误差为0.070 706 7 mm。
4 标定结果测量验证实验
对目标图像进行视觉测量时,对被测目标图像进行校正有利于提高精度。图6为倾斜的标定板图像校正图。其中,图6(a1)和图6(a2)分别为相机采集的第4帧和第9帧的原始图像;图6(b1)和图6(b2)为图像旋转角度特征提取过程,红色连线为图像旋转角度特征提取路径;图6(c1)和图6(c2)为校正后的标定板图像。
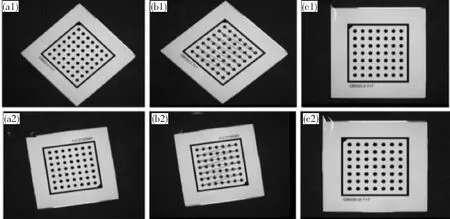
图6 标定板图像校正
将加载的图像矫正后,利用Halcon软件的“测量助手”模块进行测量。利用Halcon测量助手测量时,选择被测量对象的图像显示形式,在“边缘”标签下,选择“测量/绘制线段”,在被测量对象上“划线”测量,划线的特征圆点如图7所示。选择校正后的第7帧标定板图像,对第4行、第2列的特征圆点进行直径测量。

图7 标定板单个特征圆点测量
表1为实验中标定板圆点(第4行、第2列)的实际测量数据。因为标定板图像上划线区域与特征圆点只有2个接触点,所以测量结果只显示2个点,2点间的距离即为标定板特征圆点的直径。标定板圆点理论直径为2 mm,测量结果为1.961 38 mm,偏差为0.038 62 mm,相对误差为1.93%,证实了标定结果的准确性。

表1 单个特征圆点实际图像的测量尺寸
同时,用同一条测量曲线圈定标定板上的多个特征圆点,如图7标定板图像上第3行的全部7个特征圆点。表2为该排特征圆点实际测量结果。由表2可以得到,7个特征圆点与划线区域共有14个交点,测量的标定板特征圆点与标定板理论偏差中,最大偏差为0.070 38 mm,最小偏差为0.039 92 mm,平均偏差为0.056 55 mm,精度都高于0.1 mm,说明利用Halcon标定助手标定的准确性可以得到保障,且利用机器视觉测量物体的尺寸精度较高。

表2 多个特征圆点实际图像测量尺寸
5 结语
利用自搭建的单目视觉系统实验平台,借助视觉软件Halcon对圆点标定板进行标定实验,获取标定板图像数量对相机标定参数的影响,并通过实验验证了圆点标定板的标定精度。在本实验条件下,对圆点标定板单个特征圆点进行测量时得到偏差为0.038 62 mm,对多个特征圆点进行测量时得到平均偏差为0.056 55 mm,二者测量精度都高于0.1 mm,证明了Halcon软件在相机标定中的准确性。显然,作为机器视觉测量应用的基础,未来相机标定精度和操作简易度将会得到进一步发展。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
汽车维修与保养(2020年11期)2020-06-09
数学小灵通·3-4年级(2019年11期)2019-11-26
小猕猴智力画刊(2019年10期)2019-11-23
中国惯性技术学报(2019年1期)2019-05-21
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
小猕猴智力画刊(2019年12期)2019-01-08
电子制作(2018年12期)2018-08-01
北京航空航天大学学报(2017年4期)2017-11-23
