道路工程竖曲线测设精准计算模型
2023-01-30 13:09郭旭徐万鹏
城市勘测 2022年6期
郭旭,徐万鹏
(1.深圳市勘察测绘院(集团)有限公司,广东 深圳 518028; 2.中铁十五局集团有限公司,上海 200070)
1 引 言
铁路、公路、轨道交通等道路工程的线路纵断面,是由许多不同坡度的坡段连接而成的。两相邻坡段的连接点,称为变坡点。车辆通过变坡点时,由于坡度方向发生突变,会产生附加的力和加速度,对车辆平稳运行和乘坐舒适性造成很大影响。为了缓解变坡点处坡度的急剧变化,使车辆平稳通过变坡点,应在相邻两坡段间设置竖曲线[1]。
在我国,竖曲线通常采用圆曲线或二次抛物线[1,2]。其原因如下:
如图1所示,标准抛物线的基本方程为[2]

图1 标准抛物线与圆曲线的几何关系
x2=2Py
若取抛物线参数P为竖曲线的半径r,则有:
(1)
另外,以点R(r,0)为圆心,半径为r的圆的方程为:
x2+(y-r)2=r2
即,对于圆曲线,有
(2)
设计道路纵断面时,由相邻坡段引起的转坡角ω非常小,对于切点A和切点B之间的竖曲线而言,y远小于x,所以,y2≪x2
于是,从式(2)中舍去更高阶无穷小y2,对y的影响可以忽略不计,因此,可得:
(3)
由式(1)和式(3)可知,竖曲线采用圆曲线或二次抛物线,几乎是等价的。
在式(1)和式(2)中,y坐标是计算竖曲线对应的道路设计高程的一个最重要的参数。很显然,对于计算y坐标而言,式(1)比式(2)要简单得多。因此,在电算不普及的手算年代,通常利用二次抛物线来计算竖曲线对应的线路高程,并一直沿用至今。由于二次抛物线的弦长计算复杂,在实际应用时,通常利用圆曲线计算竖曲线要素,利用抛物线计算竖曲线的设计高程。
2 传统竖曲线测设计算方法存在的问题
设前、后坡段的坡度为i1和i2。设置竖曲线时,如果i1
如图2所示,如果前、后坡度大小相等,符号相反,则变坡点E将位于y轴上。除此而外,变坡点会偏离y轴一定距离t。为精确计算竖曲线头、尾,即垂足A和B的里程和高程,从理论上讲,首先应求得竖曲线对应的切线长AE和BE,然后利用变坡点里程KE,减去切线AE的平面投影长度,可以得到竖曲线起点A的精确里程KA,即:

图2 竖曲线传统算法示意图
KA=KE-AE·cos(tan-1i1)
进而可求得A点的精确高程
HA=HE+i1(KA-KE)
同理,可以得到竖曲线终点B的精确里程和高程,即
KB=KE+BE·cos(tan-1i2)
和
HB=HE+i2(KB-KE)
实际计算时,二次抛物线对应的切线长T很难精确求得,通常是利用圆曲线对应的参数,近似代替二次抛物线对应的参数[4~6]。具体算法如下:
(1)利用转坡角和圆曲线的半径,近似求得竖曲线的近似长度,即:
L=rω≈r(tan-1i1-tan-1i2)
由于i1和i2都很小,近似可得:
L≈r(i1-i2)
(2)假定t=0,可得竖曲线切线长的近似值:
之所以假定t=0,其原因如下:
如图1,假定前、后坡段不以y轴左右对称,则前、后坡道引起的转坡角的绝对值不相等,设其差值为dω,则有:
dω≈|i1|-|i2|
于是,可得圆曲线的圆心偏离y轴的水平距离为:
dR≈r·dω
假定变坡点对应的圆曲线的正矢为e,则有:
对于实际道路,正矢e非常小,通常在厘米至分米的量级上,dω更小,通常小于0.01,因此,假定t=0,几乎不影响运算结果。
(3)切线上任意点与竖曲线之间的竖距
即
由于
所以
(4)
式(4)中,l为竖曲线上任一点至竖曲线起点(或终点)的距离,r为竖曲线的半径。
(4)当l=T时,由式(4)可求得竖曲线的外距:
由以上推导可知,竖曲线计算的最终目的是确定道路设计纵坡上指定桩号的设计高程。即,求得竖曲线上任一点的切线高程
HQ≈HE±i(T-l)
及其改正值
进而求得该点的设计高程。对于凹型竖曲线,其设计高程为:
Ha≈HQ+h
对于凸型竖曲线,其设计高程为:
Ht≈HQ-h
经过以上分析,可知竖曲线测设的传统算法主要存在以下问题:一是数学模型不严密,用在教科书上,不利于学生理解;二是近似计算,舍入误差较大;三是计算过程烦琐,容易出错;四是需要大量的判断,不利于电脑编程运算。
目前,编程计算器和电脑已经非常普及,加之交通运输的速度不断提高,特别是高速铁路的普及,竖曲线的测设精度通常要达到毫米至亚毫米级,计算精度要求更高,采用传统近似算法,已远远无法满足高精度测量和计算的需要,规范和教科书也亟待更新。诸如文献[3]等大量的文献,也都对上述问题进行过很多研究和论述,并提供了一些精确算法,遗憾的是:这些文献只注重了计算精度,没能找出简单实用的计算公式。
3 精准竖曲线测设计算统一模型
3.1 精确确定竖曲线的桩号范围
如图3和图4所示,无论是凹型竖曲线,还是凸型竖曲线,由于前、后纵坡线和竖曲线在同一个铅锤面内,圆曲线的圆心O也在该铅锤面内,且凹型竖曲线的圆心位于道路中心线的正上方,凸型竖曲线的圆心位于道路中心线的正下方。由图3可知,前、后坡段引起的转坡角分别为:
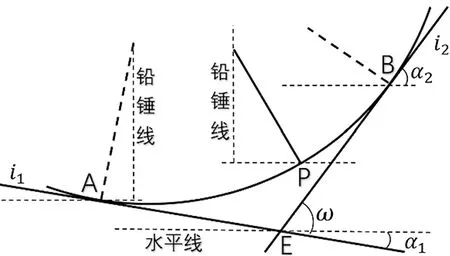
图3 凹型竖曲线计算示意图
α1=tan-1i1
(5)
和
α2=tan-1i2
(6)
上坡为仰角,转坡角为正,下坡为俯角,转坡角为负。
前、后坡段引起的总的转坡脚为:
ω=α1-α2
(7)
由图1可知,竖曲线对应的圆心角为|ω|。设圆曲线半径为r,则可求得竖曲线对应的切线长T为:
(8)
利用切线长和前、后坡段引起的转坡角,可求得竖曲线起点A和终点B的精确桩号,以及A和B的精确高程分别为:
KA=KE-Tcos(a1)
(9)
KB=KE+Tcos(a2)
(10)
HA=HE+i1(KA-KE)
(11)
HB=HE+i2(KB-KE)
(12)
因此,竖曲线精确的里程范围,即桩号范围,位于闭区间[KA,KB]上。
3.2 凹型竖曲线计算的精确模型
如图3所示,对于凹型竖曲线,其圆心O位于道路中心线的正上方,无论是上坡或下坡,利用竖曲线起点A或终点B,都能精确求得圆心O的高程,和其对应的桩号,即:
HO=HA+rcosα1=HB+rcosα2
(13)
和
KO=KA-rsinα1=KB-rsinα2
(14)
如图3,假定凹型竖曲线上任意一点P对应的里程,即桩号为KP∈[KA,KB],可求得圆心O到P点的里程的差值,即桩号差值,为:
d=KP-KO
(15)
于是,利用圆心O的高程,可以精确求得P点的高程为:
(16)
式(13)、式(14)、式(15)、式(16),即为计算凹型竖曲线的严密、精确模型。其中,式(15)的几何意义是:d的绝对值,就是竖曲线对应的圆心O,以及竖曲线上任意点P,在水平面上的投影点之间的距离。
3.3 凸型竖曲线计算的精确模型
如图4所示,对于凸型竖曲线,其圆心O位于道路中心线的正下方,无论是上坡或下坡,利用竖曲线起点A或终点B,也能精确求得圆心O的高程,和其对应的桩号。即,不仅式(15)有效,还有:
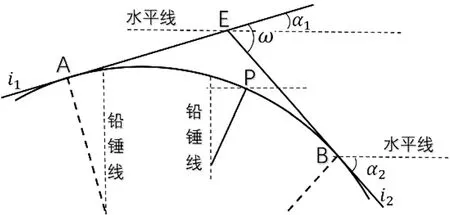
图4 凸型竖曲线计算示意图
HO=HA-rcosα1=HB-rcosα2
(17)
和
KO=KA+rsinα1=KB+rsinα2
(18)
因此,利用圆心O的高程,也可精确求得P点的高程为:
(19)
式(15)、式(17)、式(18)、式(19),即为计算凸型竖曲线的严密、精确模型。
3.4竖曲线计算的统一模型
定义符号变量f
(20)
对于竖曲线,式(20)中的i1=i2实际上是不存在的,之所以列立出来,只是为了表达数学推理的严密性。
综合式(13)和式(17),可得圆心O的高程:
HO=HA+f·r·cosα1=HB+f·r·cosα2
(21)
综合式(14)和式(18),可得圆心O的里程:
KO=KA-f·r·sinα1=KB-f·r·sinα2
(22)
综合式(16)和式(19),可得:
(23)
将式(5)和式(22)代入式(15),可得:
d=KP-KA+f·r·sin(tan-1i1)
(24)
将式(5)和式(21)代入式(23),可得:
(25)
式(24)和式(25),即为计算竖曲线的严密、精确的数学模型。
式中:KA、HA为竖曲线起点A对应的里程和高程;
f为符号变量,凹曲线取1,凸曲线取-1;
r为竖曲线的半径;
i1为竖曲线起点A所在坡道的坡度;
KP为竖曲线上任意一点P对应的里程,即桩号。
4 工程应用与模型评价
本文导出的竖曲线计算模型,基于严密推理,不存在舍入误差,因而,计算是精准的。该模型于2010年首先应用于上海力信研制的盾构导向系统中。该导向系统在国内的市场份额一度超出50%,在北京、上海、广州、深圳等众多城市地铁工程中大量采用,效果良好。不仅如此,该模型易于理解,公式简单,规律性强,适合计算机编程运算,已被多家软件公司采用。京沪高铁建设期间,多期高级测量工培训班讲解该模型,学员普遍反映该模型规律性强,易于理解。下面是笔者基于C语言编写的竖曲线计算的程序片段。
{
int f=(i1 double d=Kp-Ka-f*r*sinl(atanl(i1))); return Ha+f*(r*cosl(atanl(i1))-sqrtl(r*r-d*d)); } 可以看出,短短3行代码,就能解决复杂问题,且得到的计算结果不存在模型误差,而采用传统算法,通常需要上百行代码才能解决同样的问题。
猜你喜欢
中学生数理化(高中版.高二数学)(2022年1期)2022-04-26
中学生数理化(高中版.高二数学)(2022年1期)2022-04-26
中学生数理化·中考版(2021年10期)2021-11-22
中学生数理化(高中版.高二数学)(2021年2期)2021-03-19
中学生数理化(高中版.高二数学)(2021年2期)2021-03-19
新世纪智能(数学备考)(2020年12期)2020-03-29
中等数学(2018年1期)2018-08-01
课程教育研究(2017年26期)2017-08-02
数学教学通讯·初中版(2014年1期)2014-02-14
数学大世界·初中生辅导版(2010年2期)2010-03-08