陆地生态系统碳监测卫星植被测量子系统无控定位方法
2023-01-30 06:07岳春宇周楠杨舒琪何红艳
航天返回与遥感 2022年6期
岳春宇 周楠 杨舒琪 何红艳
陆地生态系统碳监测卫星植被测量子系统无控定位方法
岳春宇 周楠 杨舒琪 何红艳
(北京空间机电研究所,北京 100094)
陆地生态系统碳监测卫星植被测量子系统包含多波束激光雷达和0°相机。同时开机对地观测时,多波束激光雷达可提供高精度测距值转化的广义高程控制点,参与0°相机平差定位,实现在轨无控测图。文章基于陆地生态系统碳监测卫星植被测量子系统探测体制,建立图像与激光对地观测模型及其几何关系模型,引入公开粗格网数字高程模型(DEM)约束,实现激光辅助图像摄影测量平差计算。通过仿真实验分析,陆地生态系统碳监测卫星植被测量子系统无控测图方法可提升0°相机图像平面定位精度,仿真数据最优实验结果从613.05m提高到15.35m。对参与平差计算的激光控制点数量和布设位置开展了讨论,仿真数据一景图像当采用上中下三行均匀布设激光控制点时,精度最高。
植被测量子系统 无控定位 联合平差 陆地生态系统碳监测卫星
0 引言
陆地生态系统碳监测卫星主要用于陆地生态系统碳储量监测、生态资源调查、国家重大生态工程监测评价等领域,并为环保、测绘、气象、农业、减灾等领域提供业务支撑和研究服务,提高中国应对全球气候变化的话语权和主导权。陆地生态系统碳监测卫星植被测量子系统由多波束激光雷达、光轴监视相机和0°相机组成。当卫星处于光照区且侧摆角小于5°的情况下,可同时进行多波束激光雷达和0°相机高分辨率对地观测。激光雷达采用全波形探测体制接收地表激光回波,0°相机采用星下点对地成像模式获取高分辨率多光谱图像数据,而光轴监视相机同时获取激光雷达各波束及0°相机的指向信息。通过光轴监视中继匹配,可以得到多波束激光雷达对地观测脚点在0°相机中的位置,达到同时获取观测区域平面高程三维信息的目的。
传统的卫星对地测绘采用立体相机空中三角测量,实现地表三维模型重构,即数字表面模型(Digital Surface Model,DSM)+数字正摄影像(Digital Orthophoto Map,DOM)[1-3]。“资源三号”02星搭载了我国首台星载对地观测激光雷达,文献[4]使用激光辅助立体测量,在陕西渭南试验区进行试验,结果表明,可以将“资源三号”02星立体测图无控高程精度从11.54m提高到1.90m,并建议后续立体测绘卫星可搭载激光雷达业务化应用。“高分七号”卫星要实现1:10 000卫星立体测图时,依靠摄影测量外方位元素观测精度,无法满足高程1.5m和平面5m的精度设计指标。增加激光雷达,观测数据作为广义高程控制点,利用光学立体测绘定位高程与激光测高的差异建立高程约束,进行联合空中三角平差测量,最终实现无控平面定位精度7.2m,高程精度1.2m,达到了1:10 000的测绘指标[5-6]。当前激光辅助立体测绘机制下,采用激光测高数据作为高程控制点的方法对光斑大小要求较高,当光斑较大时,只能选择平坦地区的光斑,且控制点分布的均匀性比较难实现。对于非测绘卫星弱交会条件下的立体测绘,一般利用地面已有数字高程模型(Digital Elevation Model,DEM)内插连接点高程方法,避免交会角度太小、平差计算不收敛的问题[7-8]。
陆地生态系统碳监测卫星植被测量子系统多波束激光雷达与0°相机同时对地探测成像,多波束激光雷达以40Hz工作频率提供地面高密度测距格网,可以作为控制点与0°相机图像联合平差定位,实现无控测图。本文基于陆地生态系统碳监测卫星植被测量子系统探测方法,通过建立图像几何成像模型和激光对地观测模型之间的关系,构建激光辅助面阵摄影测量平差模型。最后经过数据仿真计算,对无地面控制情况下的测图精度开展实验验证。
1 植被测量子系统定位平差模型
1.1 遥感图像的几何定位平差模型
卫星遥感图像的成像几何模型用式(1)表示[9-11]

通过少数地面控制点,根据式(1),构建光束法区域网平差模型,如式(2)所示[12-14]
根据光束法区域网平差原理,通过构建上述误差方程,可以实现遥感图像检校和几何校正以及DOM制作[15-16]。
1.2 激光雷达对地定位模型
激光雷达对地定位几何模型如式(3)所示[17-21]

陆地生态系统碳监测卫星光轴监视相机能够记录激光出光时的光斑图像,从而获得激光出射时的指向角。光轴监视相机中激光出光指向与卫星坐标系之间的关系如图1所示。
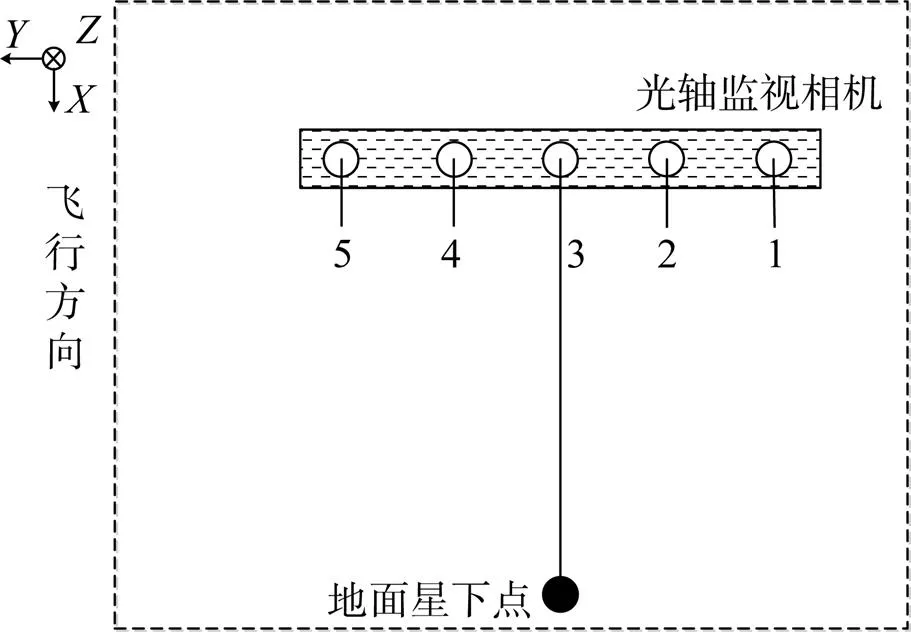
图1 光轴监视相机坐标系示意图

式(3)与式(4)联立,即构建了激光雷达与光轴监视相机的对地定位三维关联模型。
1.3 植被测量子系统区域网平差模型
陆地生态系统碳监测卫星植被测量子系统5波束激光雷达与0°相机同时工作。0°相机地面分辨率2m,幅宽20km,5波束激光雷达每波束每秒发射40个脉冲,获取与0°相机同视场下均匀分布的测距值,并由光轴监视相机记录光斑的地面位置。配准光轴监视相机图像与0°相机图像,将激光光斑位置转刺到0°相机图像上,作为控制点。联立式(1)、(3),建立连接点的激光辅助面阵相机定位方程
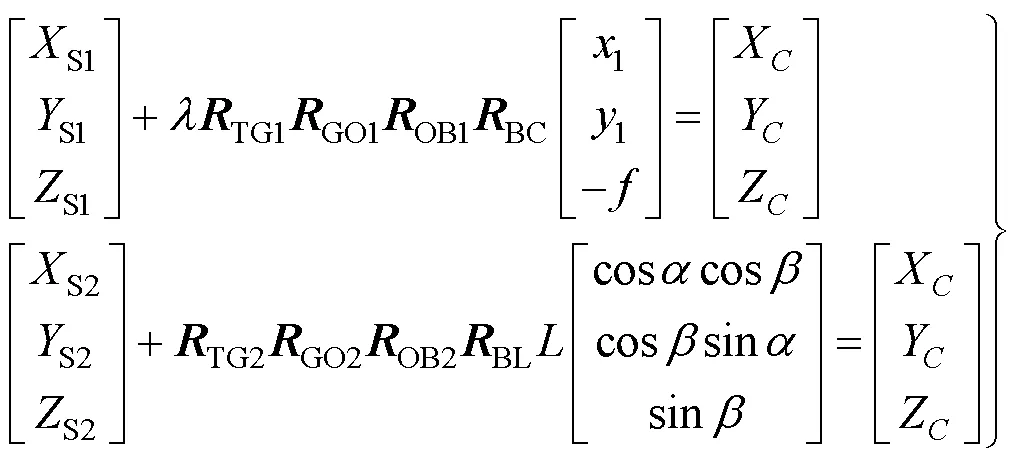

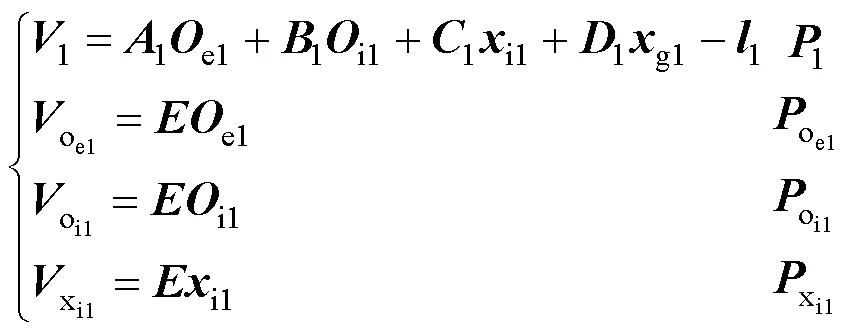
在式(2)基础上,建立激光辅助面阵相机无控制图,针对上述误差改正数的联合平差模型
由于激光雷达与0°相机姿轨精度一致且均由卫星平台确定,直接联合平差对平面定位精度提升有限,一般需要先对激光雷达几何检校后使用[23]。本文为了实现无控测图,可先将5波束激光雷达生成的激光控制点格网与粗格网DEM数据匹配,修正激光控制点平面定位精度。经过修正后的激光控制点,可以作为平高控制点,进一步提升系统定位精度。
2 植被测量子系统无控平差实验与分析
2.1 实验流程
本文方法算法流程如图2所示。由多波束激光雷达对地探测几何模型获取激光地面三维坐标,与公开粗格网DEM匹配提升平面定位精度,作为激光控制点,与0°相机图像构建激光辅助自检校联合平差模型,平差计算0°相机及多波束激光雷达几何模型的内外方位元素改正数,同时获取地面点三维坐标。
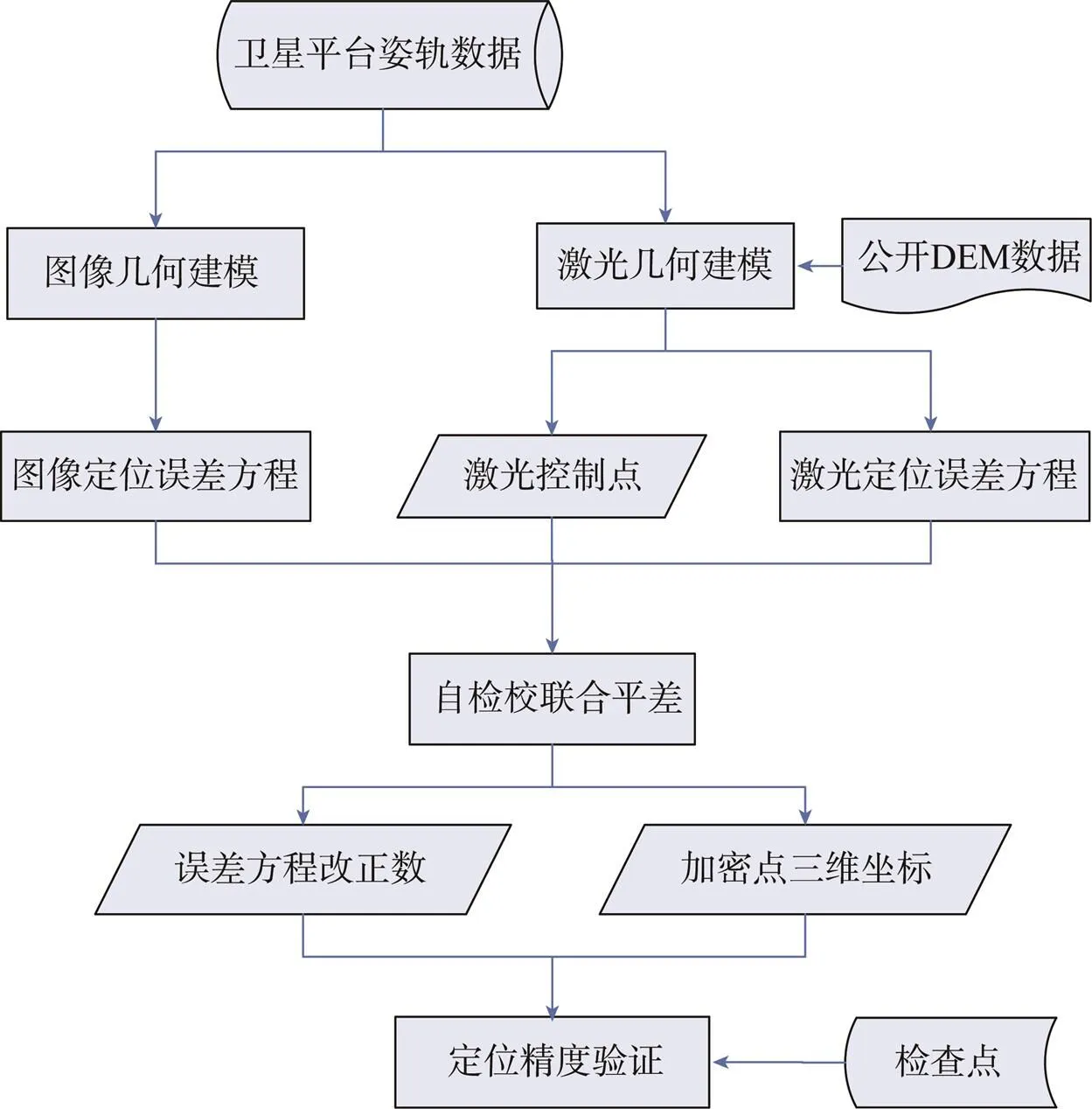
图2 激光辅助0°相机无控定位方法
具体流程为:
1)分别对0°相机和多波束激光雷达构建几何定位模型;
2)根据多波束激光雷达几何定位模型计算激光控制点坐标;
3)激光控制点构成DEM与公开粗格网DEM匹配,精化激光控制点平面坐标;
4)分别根据0°相机和多波束激光雷达几何定位模型构建其定位误差方程;
5)以激光控制点为控制点,构建0°相机和多波束激光雷达自检校联合平差模型,解算0°相机和多波束激光雷达定位误差方程改正数及地面加密点三维坐标;
6)使用检查点验证自检校平差后的图像几何定位精度。
2.2 实验及分析
采用某区域“资源三号”03星下视2.1m分辨率图像和仿真多波束激光雷达数据进行无控平差实验。为了仿真0°相机图像大小,将“资源三号”03星下视图像裁剪为20km×20km范围,激光雷达控制点布设方案采用中间布设、上中下布设和5×5均匀布设三种模式,图3中三角形代表选用的激光控制点。
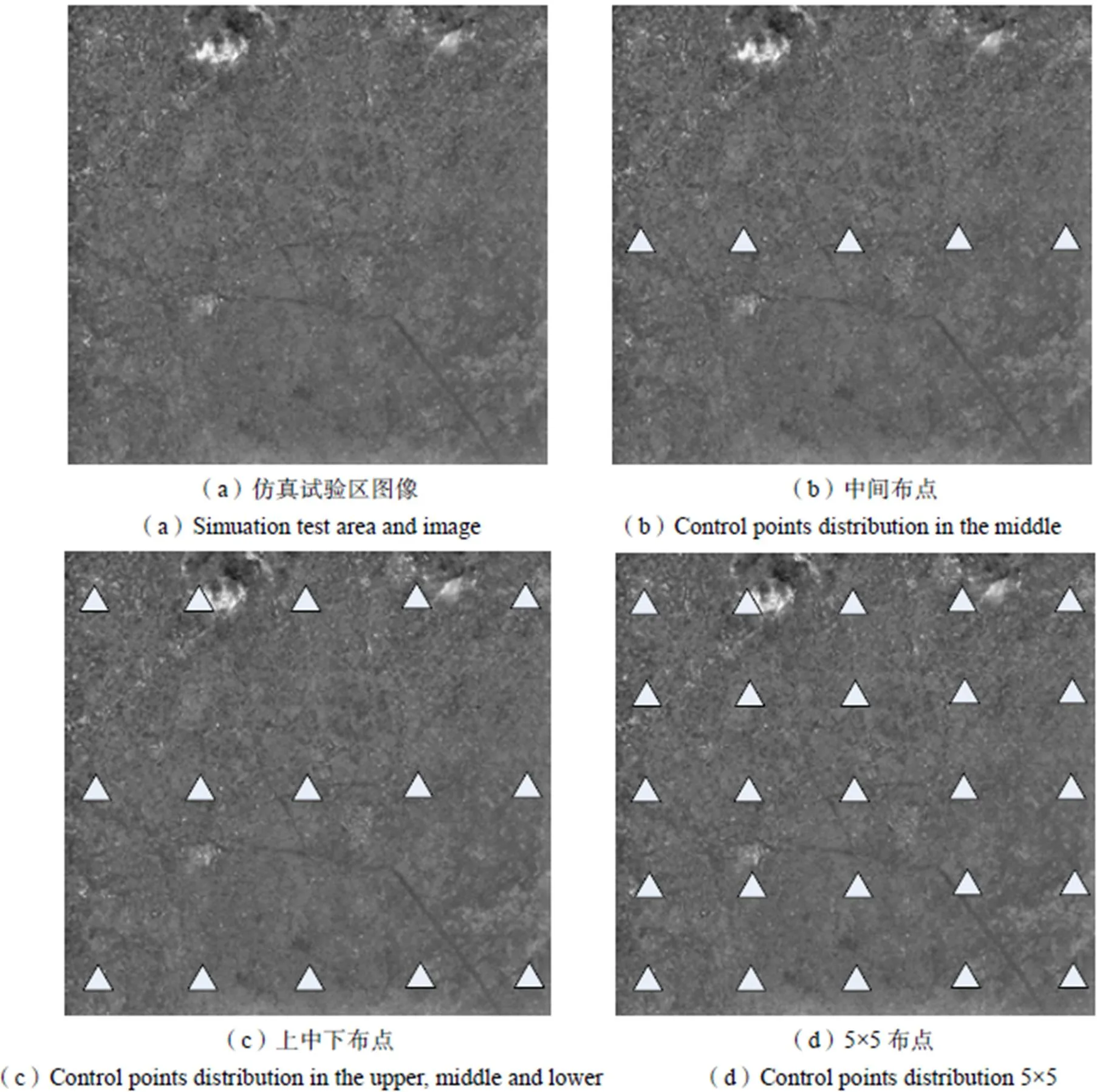
图3 试验区及激光控制点布设方案
仿真实验参数见表1。
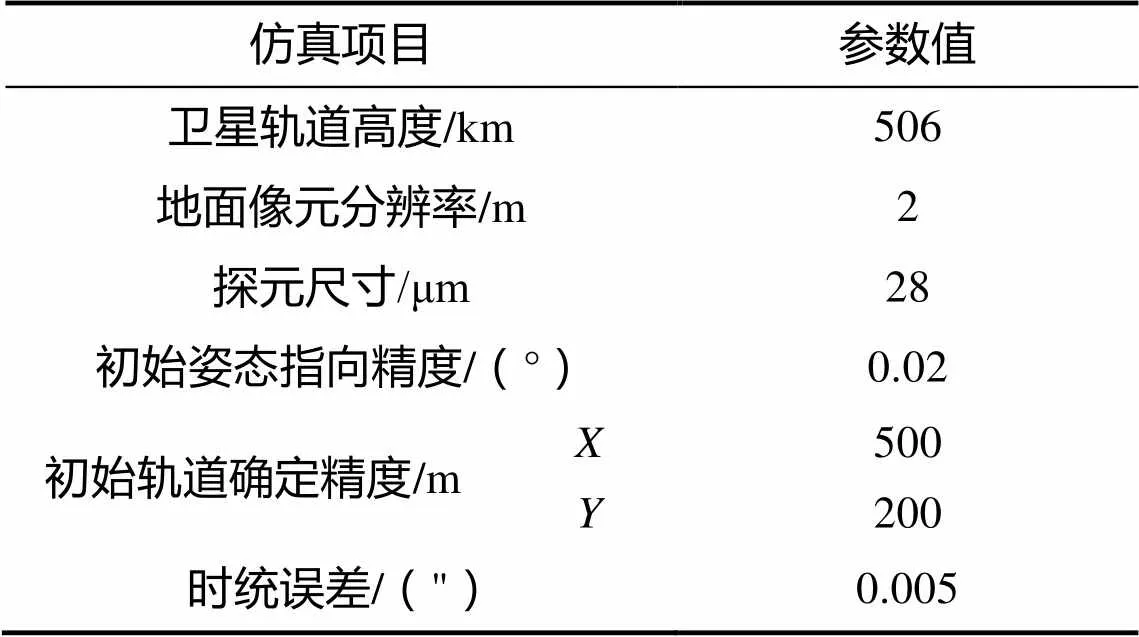
表1 仿真实验参数
不实际平差计算,使用该仿真实验参数,由共线条件方程误差传播公式预估得到的定位精度结果为方向529.61m,方向265.39m,平面592.39m。
采用试验区50个检查点对平差结果进行精度评价。
(1)实验1
图像直接无控平差结果见表2。

表2 0°相机图像直接定位精度
从表2可以看出,仿真图像直接在没有任何控制点约束的情况下,平面定位精度为613.05m,与根据仿真参数精度预估的定位精度结果相仿,证明平差仿真计算结果正确。
(2)实验2
采用图3(b)方案平差结果见表3。

表3 0°相机图像与中间5波束激光联合定位平差精度
加入5波束激光雷达获取的激光控制点后,平面定位精度有了显著提升。仿真误差定轨精度方向优于方向,所以在没有控制约束的情况下,定位精度方向应优于方向,与表3中计算结果一致。由于激光控制点与粗格网DEM匹配后,修正了激光控制点的平面定位精度方向到相同水平,所以在表3中平差精度与方向已没有明显差异,且得到了整体提升,平面总体定位精度与无控制点相比提升近10倍。
(3)实验3
采用图3(c)方案平差结果见表4。

表4 0°相机图像与上中下15波束激光联合定位平差精度
加入少量均匀分布的激光控制点后,平差结果平面精度有了大幅提升,得益于控制点位分布对图像边缘和中心都能够有效控制,且平面定位精度已达到公开粗格网DEM平面精度,基本达到了修正后激光控制点的平面绝对定位精度。
(4)实验4
采用图3(c)方案平差结果见表5。

表5 0°相机图像与5×5均匀分布25波束激光联合定位平差精度
在上中下均匀分布的基础上再加密到5×5共25个激光控制点后,平面定位精度比实验(3)下降了一倍,但是方向没有明显下降。这是由于多波束激光雷达外方位元素一致,获取的激光控制点手段具有强相关性,超过一定数量造成过度参数化[24]。而方向的定位精度主要由激光测距值来控制,激光控制点的激光测距值相对于平面定位精度受到外方位元素的影响小,更加可靠稳定,这也是“资源三号”系列卫星采用激光测距值作为广义高程控制点的原因。
由上述实验分析可知,本文方法使用激光控制点可有效提升0°相机图像平面定位精度,仅在图像中央布设激光控制点不如采用少量激光控制点均匀布设在图像边缘,每景图像采用5×3均匀分布的激光控制点,参与激光与图像联合平差,可实现与参考公开粗格网DEM一致的平面定位精度。采用5×5密集分布激光控制点时,则精度有所下降。对于陆地生态系统碳监测卫星植被测量子系统高重频激光雷达来说,可间隔采样,避免参数强相关性影响定位精度。
3 结束语
陆地生态系统碳监测卫星植被测量子系统无控测图方法是利用激光测高数据和公开粗格网修正后获取的激光控制点,提供给0°相机图像和多波束激光雷达定位联合平差,实现无控定位测图。通过仿真实验分析,以公开粗格网DEM为参考,测图平面定位精度可达到15.35m。另外根据多波束激光雷达对地观测设计,对激光控制点选取不同分布方案,根据平差结果分析可知,应采用少量均匀分布在图像边缘的激光控制点,才能获取最优定位精度。对于激光控制点的分布及数量对平差结果的影响后续应进一步讨论分析。
[1] 孙承志, 唐新明, 翟亮. 我国测绘卫星的发展思路和应用展望[J]. 测绘科学, 2009, 34(2): 5-7.
SUN Chengzhi, TANG Xinming, ZHAI Liang. Development Ideas and Application Prospects of Surveying and Mapping Satellite in China[J]. Science of Surveying and Mapping, 2009, 34(2): 5-7. (in Chinese)
[2] 李德仁. 我国第一颗民用三线阵立体测图卫星——资源3号测绘卫星[J]. 测绘学报, 2012, 41(3): 317-322.
LI Deren. China’s First Civilian Three-line-array Stereo Mapping Satellite: ZY-3[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(3): 317-322. (in Chinese)
[3] 曹海翊, 戴君, 张新伟, 等. “高分七号”高精度光学立体测绘卫星实现途径研究[J]. 航天返回与遥感, 2020, 41(2): 17-28.
CAO Haiyi, DAI Jun, ZHANG Xinwei, et al. Study on the Development Approach of GF-7 High Precision Optical Stereo Mapping Satellite[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(2): 17-28. (in Chinese)
[4] 李国元, 唐新明. 资源三号(02)星激光测高精度分析与验证[J]. 测绘学报, 2017, 46(12): 1939-1949.
LI Guoyuan, TANG Xinming. Analysis and Validation of ZY-3 02 Satellite Laser Altimetry Data[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(12): 1939-1949. (in Chinese)
[5] 曹海翊, 刘付强, 赵晨光, 等. 高分辨率立体测绘卫星技术研究[J]. 遥感学报, 2021, 25(7): 1400-1410.
CAO Haiyi, LIU Fuqiang, ZHAO Chenguang, et al. The Study of High Resolution Stereo Mapping Satellite[J]. National Remote Sensing Bulletin, 2021, 25(7): 1400-1410. (in Chinese)
[6] 张新伟, 贺涛, 赵晨光, 等. 高分七号卫星测绘体制与性能评估[J]. 航天器工程, 2020, 29(3): 1-11.
ZHANG Xinwei, HE Tao, ZHAO Chenguang, et al. Demonstration of Surveying and Mapping System and Performance Evaluation of GF-7 Satellite[J]. Spacecraft Engineering, 2020, 29(3): 1-11. (in Chinese)
[7] 曹宁. 以DEM为高程辅助的弱交会卫星影像的区域网平差[D]. 兰州: 兰州交通大学, 2014.
CAO Ning. DEM-aided Block Adjustment for Satellite Images with Weak Convergence Geometry[D]. Lanzhou: Lanzhou Jiaotong University, 2014. (in Chinese)
[8] 曹辉, 陶鹏杰, 李海鸿, 等. DEM约束的卫星影像定位法[J]. 测绘学报, 2020, 49(1): 79-91.
CAO Hui, TAO Pengjie, LI Haihong, et al. Using DEM as Full Controls in Block Adjustment of Satellite Imagery[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(1): 79-91. (in Chinese)
[9] POLI D. General Model for Airborne and Spaceborne Linear Array Sensors[C]//ISPRS Commission I Symposium—— Integrating Remote Sensing at the Global, Regional and Local Scale, November 10-15, 2002, Denver, CO (USA). ISPRS, 2002: 177-182.
[10] KIM T, KIM H, RHEE S, et al. Investigation of Physical Sensor Models for Modeling SPOT 3 Orbits[J]. The Photogrammetric Record, 22(119): 257-273.
[11] 余俊鹏. 高分辨率卫星遥感影像的精确几何定位[D]. 武汉: 武汉大学, 2009.
YU Junpeng. Accurate Geometric Positioning of High Resolution Satellite Remote Sensing Imagery[D]. Wuhan: Wuhan University, 2009. (in Chinese)
[12] 贾博, 姜挺, 张锐, 等. 基于定向片模型的SPOT-5遥感影像自检校光束法平差[J]. 测绘科学, 2014, 39(9): 3-10.
JIA Bo, JIANG Ting, ZHANG Rui, et al. Self-calibration Bundle Adjustment of SPOT-5 Remote-sensing Imagery Based on Orientation Image Model[J]. Science of Surveying and Mapping, 2014, 39(9): 3-10. (in Chinese)
[13] TOUTIN T. Spatiotriangulation with Multisensor VIR/SAR Images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2004, 42(10): 2096-2103.
[14] TOUTIN T. Generation of DSMs from SPOT-5 In-track HRS and Across-track HRG Stereo Data using Spatiotriangulation and Autocalibration[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 60(3): 170-181.
[15] 张过. 缺少控制点的高分辨率卫星遥感影像几何纠正[D]. 武汉: 武汉大学, 2005.
ZHANG Guo. Rectification for High Resolution Remote Sensing Image Under Lack of Ground Control Points[J]. Wuhan: Wuhan University, 2005. (in Chinese)
[16] 张过, 厉芳婷, 江万寿, 等. 推扫式光学卫星影像系统几何校正产品的3维几何模型及定向算法研究[J]. 测绘学报, 2010, 39(1): 34-38.
ZHANG Guo, LI Fangting, JIANG Wanshou, et al. Study of Three-dimensional Geometric Model and Orientation Algorithms for Systemic Geometric Correction Product of Pushbroom Optical Satellite Image[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(1): 34-38. (in Chinese)
[17] XIE J, TANG X, MO F, et al. In-Orbit Geometric Calibration and Experimental Verification of the ZY3-02 Laser Altimeter[J]. The Photogrammetric Record, 2018, 33(163): 341-362.
[18] 张过, 李少宁, 黄文超, 等. 资源三号02星对地激光测高系统几何检校及验证[J]. 武汉大学学报(信息科学版), 2017, 42(11): 1589-1596.
ZHANG Guo, LI Shaoning, HUANG Wenchao, et al. Calibration and Validation of ZY3-02 Satellite Laser Altimeter System[J]. Geomatics and Information Science of Wuhan University, 2017, 42(11): 1589-1596. (in Chinese)
[19] LUTHCKE S B, STONEKING E. Spaceborne Laser-altimeter-pointing Bias Calibration from Range Residual Analysis[J]. Journal of Spacecraft and Rockets, 2000, 37(3): 374-384.
[20] MAGRUDER L A, WEBB C E, URBAN T J, et al. ICESat Altimetry Data Product Verification at White Sands Space Harbor[J]. IEEE Transactions on Geosciences and Remote Sensing, 2007, 45(1): 147-155.
[21] 田世强. 国产星载激光雷达在轨几何检校与验证技术研究[D]. 西安: 长安大学, 2017.
TIAN Shiqiang. Geometric Calibration and Validation of Domestic Space-Borne Laser Altimeter[D]. Xi’an: Chang’an University, 2017. (in Chinese)
[22] 岳春宇, 郑永超, 陶宇亮. 星载激光测高仪辅助卫星摄影测量浅析[J]. 航天返回与遥感, 2013, 34(4): 71-76.
YUE Chunyu, ZHENG Yongchao, TAO Yuliang. Study on Space-borne Laser Altimeter Supported Satellite Photogrammetry[J]. Spacecraft Recovery & Remote Sensing, 2013, 34(4): 71-76. (in Chinese)
[23] 唐新明, 刘昌儒, 张恒, 等. 高分七号卫星立体影像与激光测高数据联合区域网平差[J]. 武汉大学学报(信息科学版), 2021, 46(10): 1423-1430.
TANG Xinming, LIU Changru, ZHANG Heng, et a1. GF-7 Satellite Stereo Images Block Adjustment Assisted with Laser Altimetry Data[J]. Geomatics and Information Science of Wuhan University, 2021, 46(10): 1423-1430. (in Chinese)
[24] PI Y, LI X, YANG B. Global Iterative Geometric Calibration of a Linear Optical Satellite Based on Sparse GCPs[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(1): 436-446.
Positioning without Ground Control Points of Vegetation Measurement System on Terrestrial Ecosystem Carbon Inventory Satellite
YUE Chunyu ZHOU Nan YANG Shuqi HE Hongyan
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
The Vegetation Measurement System on Terrestrial Ecosystem Carbon Inventory Satellite includes a multi-beam LiDAR and a 0° camera, the high accuracy distance obtained by multi-beam LiDAR can be used as generalized elevation control point for the 0°camera image positioning adjustment without control points, when they are working at the same time in-orbit. In this paper, the positioning combined adjustment model is based on the geometric model of multi-beam LiDAR and the 0° camera, with the LiDAR control points corrected by public coarse grid DEM. The location accuracy of 0° camera is improved in the simulation experiment from 613.05m to 15.35m in the best case. And the number and the distribution of LiDAR control points are also analysed, when the LiDAR control points are evenly set in the upper, middle, and lower three lines of one scene image, the location accuracy is the highest.
vegetation measurement system; positioning without ground control points; combined adjustment; Terrestrial Ecosystem Carbon Inventory Satellite
TP751
A
1009-8518(2022)06-0050-09
10.3969/j.issn.1009-8518.2022.06.005
2022-10-17
国家重大科技专项工程
岳春宇, 周楠, 杨舒琪, 等. 陆地生态系统碳监测卫星植被测量子系统无控定位方法[J]. 航天返回与遥感, 2022, 43(6): 50-58.
YUE Chunyu, ZHOU Nan, YANG Shuqi, et al. Positioning without Ground Control Points of Vegetation Measurement System on Terrestrial Ecosystem Carbon Inventory Satellite[J]. Spacecraft Recovery & Remote Sensing, 2022, 43(6): 50-58. (in Chinese)
岳春宇,男,1983年生,2012年获武汉大学摄影测量与遥感专业博士学位,高级工程师。主要研究方向航天摄影测量与遥感。E-mail:ycy1893@163.com。
(编辑:庞冰)
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
通信技术(2019年3期)2019-05-31
中国交通信息化(2019年1期)2019-03-26
制造技术与机床(2018年10期)2018-10-13
电子制作(2018年16期)2018-09-26