
基于激光多普勒原理的超高冲击加速度校准系统
2023-01-28 13:28:58刘格格吕东锴刘科廖舒琅王聪何斌
计测技术 2022年6期
刘格格,吕东锴,刘科,廖舒琅,王聪,何斌
(中国工程物理研究院计量测试中心,四川 绵阳 621900)
0 引言
高g值冲击加速度传感器在武器研制、航空航天等高过载测量中发挥了重要的作用。例如,在某些冲击过程中,瞬时冲击加速度峰值可达到2.5× 105g(g = 9.80665 m/s2)及以上,对传感器的测量范围、抗过载能力以及固有频率提出了较高的要求,相应地也对高冲击加速度传感器的校准能力提出了高量程、高准确度等新要求。因此必须开展超高冲击加速度的校准研究,为此类传感器科学应用以及性能评估提供必要的计量保障[1-2]。
从20世纪60年代开始,国外开始高g值加速度传感器的校准,随着科技的发展,不同的校准方法被相继提出并广泛应用,例如:国际标准ISO 5347−0:1987《Methods for the calibration of vibra⁃tion and shock pick-ups — Part 0: Basic concepts》中的冲击力法、ISO 16063-1:1998《Methods for the calibration of vibration and shock transducers — Part 1: Basic concepts》中的速度改变法和ISO 16063-13:2001《Methods for the calibration of vibration and shock transducers — Part13: Primary shock calibra⁃tion using laser interferometry》中的激光绝对法[3]。冲击力法是用力传感器作为参考力值的传递媒介来校准冲击加速度计。速度改变法需要在被校的高冲击加速度计的幅值和频率范围内进行线性的假设,且通过测量速度改变量来校准加速度,加速度量值无法直接复现,校准结果依赖被校传感器本身的特性;而激光绝对法基于激光多普勒原理,可以溯源至计量学的基本量——时间和长度,绝对复现冲击加速度量值和单位。激光干涉法复现的冲击加速度量值不依赖其他中间物理量(例如力、应变或速度该变量),所以不用对被校加速度计作任何假设[3-7]。
德国联邦物理技术研究院(PTB)在冲击加速度计激光绝对法校准方面发展较早,其两项冲击加速度标准装置均基于激光多普勒原理,采用外差式激光干涉法复现冲击加速度量值,例如:高冲击标准装置的加速度峰值范围为1000 ~ 100000 m/s2,冲击脉宽范围为30 ~ 300 μs,其校准结果的扩展不确定度为1%(k= 2)。中国计量科学研究院建立了加速度范围20 ~ 1000000 m/s2、冲击脉宽范围20 ~ 200 μs的冲击加速度激光绝对法基准装置,实现了加速度计冲击灵敏度的绝对法校准[8]。
本文基于激光绝对法,对1 × 104g ~ 2.5 × 105g加速度范围内的高冲击加速度进行校准,建立了超高冲击加速度校准系统,从Hopkinson杆末端获得冲击响应的多普勒原始信号,进而可以实现对冲击加速度物理量的绝对复现。由于冲击试验采集到的多普勒信号频带宽,容易被各种噪声干扰,因此本文选择了合适的解调方法和滤波算法对原始多普勒信号进行解调,得到加速度信号,高冲击加速度测量结果不确定度为8%。
1 高冲击加速度校准系统
高冲击加速度校准系统采用轴向测速模型,包含超高冲击加速度激励系统、激光干涉测量系统、柔性缓冲机构、数据采集与处理系统等,系统组成如图1所示。电磁发射为Hopkinson激励装置提供理想可控的弹丸撞击速度。将被校加速度计安装在Hopkinson杆的末端,其端面反射激光多普勒测量装置发出的激光信号。反射面采用直接漫反射形式以减少横向干扰,粘贴含有玻璃微珠的反光纸,使得激光源和光电探测器光电输出信号具有较高的信噪比[9]。当Hopkinson杆受到冲击作用,会发生一定的位移,激光信号也相应地产生多普勒频移,最后通过信号解调,即可得到位移的时间历程曲线。考虑到冲击的发生时间短,冲击脉宽不大于100 μs,因此选用了外差激光测振仪,其具有线性度高、抗噪声能力强、短时稳定性好和测量准确性高的优点[10]。数据采集与处理系统包括NI PXIe-1092机箱、NI PXIe-8840控制器、NI PXIe-5111示波器卡、PXIe-6386高速数据采集卡,如图2所示,NI PXIe-6386采集卡采集冲击传感器的输出信号,NI PXIe-5111采集激光测振仪输出的多普勒信号。最后利用NI的PXI模块和LabVIEW软件平台编制超高冲击加速度校准软件。该校准软件可以完成信息录入、数据分析、数据处理、数据存储及查询,实现冲击加速度计的冲击脉宽和冲击灵敏度幅值的绝对法校准,并出具校准证书。
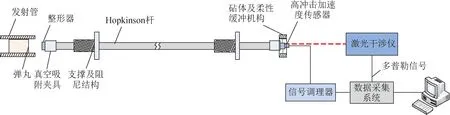
图1 超高冲击校准系统组成Fig.1 Composition of ultra-high shock calibration system
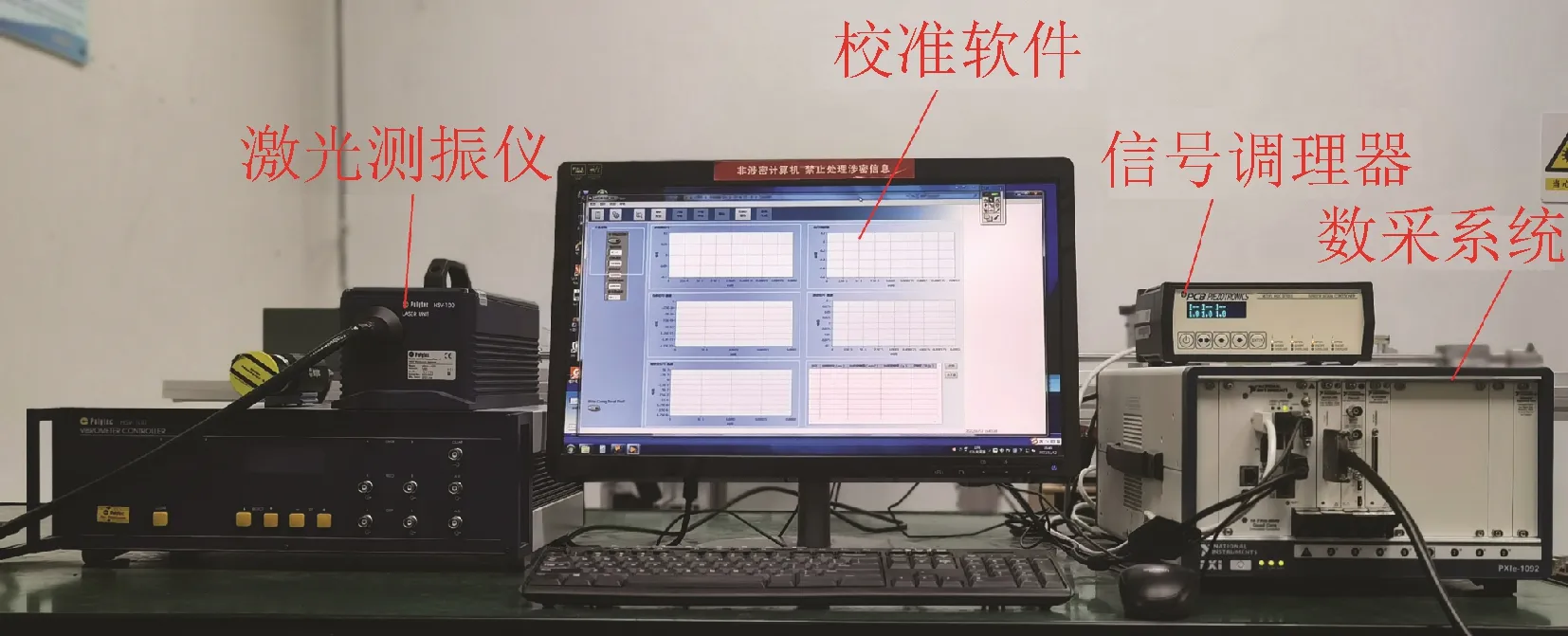
图2 数据采集与处理系统Fig.2 Data acquisition and processing systems
在使用上述超高冲击加速度校准系统开展高冲击试验时发现,当冲击量值较大时,直接螺钉安装的方式会使应力波在Hopkinson杆中来回传播,这不仅让传感器承受多次冲击,还会在一次冲击时产生正向与负向加速度的两次加卸载,增加了传感器内部晶体、线缆和螺钉损坏的风险,负向加速度还存在多种频谱成分,对低固有频率的传感器也可能引起谐振。为解决上述问题,必须改进应力波的作用方式,因此设计了砧体及柔性缓冲结构,对冲击应力波进行分离,实现冲击脉冲的单次加载。图3所示柔性缓冲机构包含换能组件、止回组件、调节组件、滑轨组件、柔性组件等。经实验验证,该机构在2.5 × 105g的极限冲击状态下也能产生较为理想的单脉冲正向加速度,后端的幅值振荡最大仅为峰值的6.5%。与原有的加载方式相比,该设计形成了“单次”冲击,避免了多次重复加载,而且减少了峰值频谱成分,降低了传感器发生谐振的概率,对校准过程中的传感器及线缆结构形成了有效保护[11]。
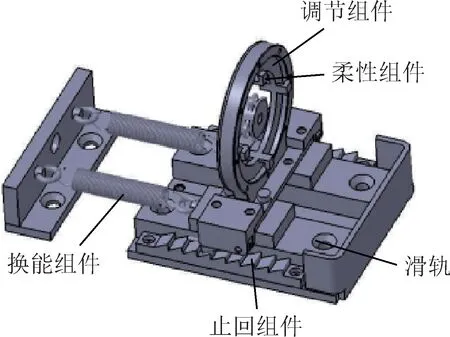
图3 柔性缓冲机构Fig.3 Flexible cushioning mechanism
2 高冲击试验
搭建超高冲击加速度校准系统,激光测振仪光轴平行于Hopkinson杆,数据采集系统的采样率为1 GS/s,采集冲击响应的多普勒原始信号,如图4所示。
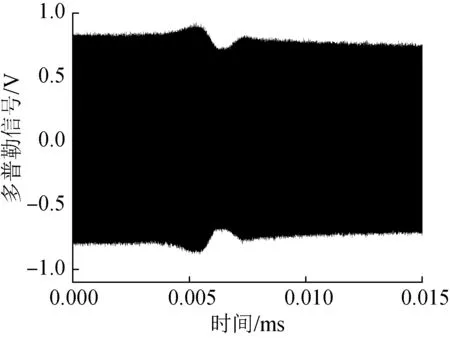
图4 多普勒信号Fig.4 Doppler signal
冲击加速度测量准确性的关键在于多普勒信号处理,其方法由频谱分析法、频率跟踪法发展为计数法、快速傅里叶变换、数字相关法、光子相关频谱法、瞬时相位法等。本系统选用了瞬时相位法,原理如图5所示。
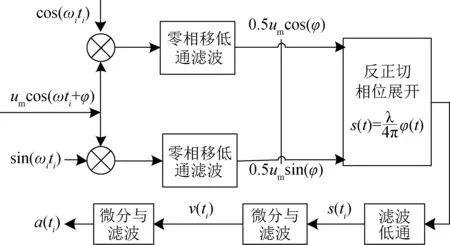
图5 激光多普勒信号解算过程Fig.5 Laser Doppler signal solving process
构造出频率相同的两路正交信号,将两路正交信号与采集到的多普勒信号进行混频,通过反正切运算得到原始信号的瞬时相位,再由相位信号得到位移信号,并经过两次微分得到加速度信号。这是ISO 16063-13:2001推荐的数据处理方法[12-13]。这种方法直接对时域内的多普勒信号进行解调,引入的误差小。
由于采集到的多普勒信号中多为高频噪声,因此高冲击加速度校准中通常需要使用低通滤波器滤除机械和电的干扰、噪声、谐振等。本系统使用的是巴特沃斯低通滤波器,具有平坦的幅值响应和良好的相频线性特性。ISO 16063-13:2001规定,若冲击波形的脉宽为T,巴特沃斯滤波器的截止频率上限范围为15/T ~ 5/T。本系统在1 × 104g~ 2.5 × 105g范围内冲击信号的脉宽T为20 ~ 50 μs,根据脉宽选择合适的滤波器截止频率[3]。
图6为高冲击试验中解算出的速度曲线,运动砧体受到冲击后由静止开始加速,加速到最大速度后做匀速运动,最大速度分别为3.08,11.9,
15.9,20.9,25.7,29.6 m/s。
对速度做滤波和微分处理后,即可得到本系统绝对复现的加速度曲线,如图7所示,加速度峰值分别为10899 g,60960 g,98150 g,147512 g,193004 g,249603 g。对应的冲击脉宽取冲击脉冲幅值大于峰值10%的时间长度,分别为50,33,27,24,22,20 μs。由上述结果可知,该校准系统实现了冲击加速度峰值为1×104g~2.5×105g,冲击脉宽为20~50 μs范围内半正弦冲击波形的绝对复现。
3 不确定度评定
分析校准方法可知,影响高冲击加速度测量不确定度的主要因素有:激光波长不稳定引入的不确定度u1;测振仪光轴与被测面不垂直引入的不确定度u2;数据信号采集不准引入的不确定度u3;数据处理方法偏差引入的不确定度u4;环境干扰引入的不确定度u5;重复性引入的不确定度u6[14-15]。
1)激光波长不稳定引入的不确定度u1
经过溯源得到激光测振仪波长不稳定引入的不确定度u1= 3 × 10-6。
2)测振仪光轴与被测面不垂直引入的不确定度u2
将激光测振仪按照与被测面运动方向一致进行姿态调节,并通过激光测振仪上反射信号的强弱寻找最佳位置,但运动过程中测振仪光轴与被测面的法线方向不一定能绝对平行,则测量的加速度值存在一个余弦偏差。通过调节装置,可以将角度偏差θ控制在2°以内,假设为均匀分布,则干涉仪光轴与被测面不垂直引入的相对标准不确定度为

3)数据信号采集引入的不确定度u3
激光多普勒信号由数采卡进行采集,数采卡的采样率、位数等对测量结果引入了不确定度。根据仪器的溯源证书,考虑测量值在其误差限内均匀分布,最大允许误差为±Δ3,则数据信号采集引入的相对标准不确定度为
4)数据处理方法偏差引入的不确定度u4
为测定此项不确定度分量,模拟生成不同冲击加速度峰值和脉宽时的多普勒调制信号并加入随机白噪声,信噪比为10,解调得到的加速度测量误差如表1所示,考虑测量值在其误差限内均匀分布,则数据处理方法引入的相对标准不确定度
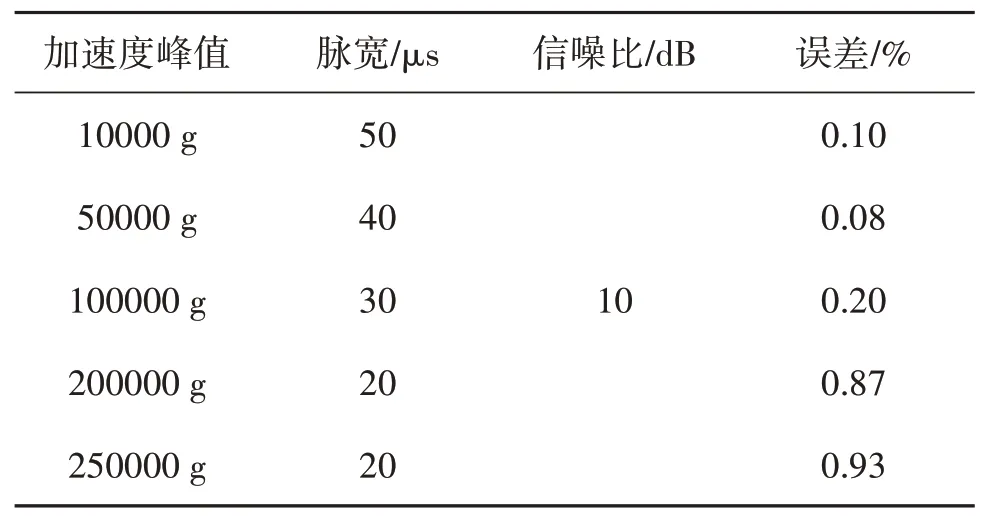
表1 解调程序的仿真结果Tab.1 Simulation results of demodulation programs
5)环境干扰等引入的不确定度u5
由于环境干扰、光电转换信号噪声等因素,在冲击发生前就存在一定的加速度。在不同冲击加速度峰值下进行了多次试验,计算冲击响应前加速度的均值,得到其引入的最大相对标准不确定度u5= 0.3%。
6)重复性引入的不确定度u6
利用高冲击校准系统在1 × 104g ~ 2.5 × 105g范围内开展不同量级的高冲击试验,分别进行10次,采集多普勒信号,并解调得到冲击加速度峰值和冲击脉宽,加速度峰值如表2所示。采用贝塞尔法计算实验标准偏差为
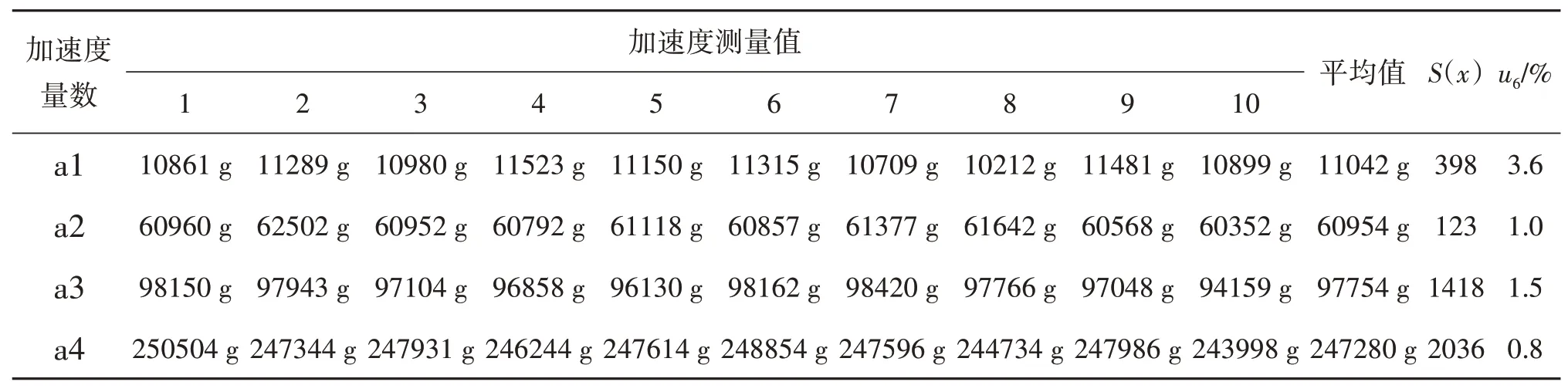
表2 冲击 加速度幅值重复性Tab.2 Repeatability of shock acceleration amplitude

因此得到不同冲击加速度下,重复性引入的相对标准不确定u6小于4%。
根据上述分析结果,本系统的测量不确定度分量如表3所示。
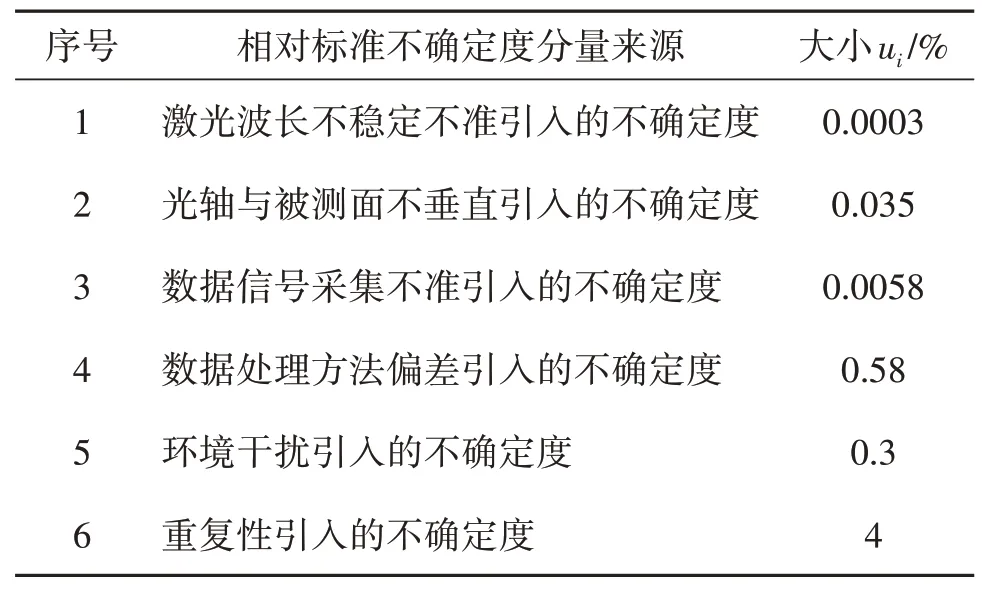
表3 测量不确定度分量表Tab.3 Measurement uncertainty components
由于各不确定度分量均相互独立,即相关系数为零,则合成标准不确定度为

取包含因子k= 2,则相对扩展不确定度为

4 结论
在介绍了超高冲击加速度校准系统的构成后,设计了柔性缓冲机构,通过多普勒信号处理等相关技术研究,实现了冲击加速度峰值在1 × 104g ~2.5 × 105g,脉宽20 ~ 50 μs范围内半正弦冲击波形的绝对复现,且重复性良好,加速度幅值测量不确定度为8%,本研究对提升我国超高冲击加速度校准范围具有重要意义。
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:20
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
电子器件(2015年5期)2015-12-29 08:43:38
汽车维修与保养(2015年12期)2015-04-18 07:51:45
汽车维修与保养(2015年6期)2015-04-17 03:31:44
汽车维护与修理(2015年6期)2015-02-28 12:17:08
创业家(2015年4期)2015-02-27 07:53:13
机械与电子(2014年2期)2014-02-28 02:07:47
