
综掘工作面智能局部通风机管控系统研究
2023-01-24 07:54:12曹建文
矿山机械 2023年1期
曹建文
1山西天地煤机装备有限公司 山西太原 030006
2中国煤炭科工集团太原研究院有限公司 山西太原 030006
3煤矿采掘机械装备国家工程实验室 山西太原 030006
瓦斯是煤矿井下安全防治的重中之重。煤矿井下瓦斯事故是由于掘进过程中煤层气压平衡破坏,瓦斯突然释放出来,或游离于巷道内部,或吸附于煤岩上。瓦斯积聚到一定浓度后遇明火发生燃烧或者爆炸,引发煤矿井下瓦斯事故。瓦斯事故是威胁煤矿井下安全生产的主要因素之一。据统计,发生在综掘工作面的瓦斯事故占总瓦斯事故的 70%~80%[1-2]。因此,需迫切研究局部通风管控系统解决综掘工作面瓦斯安全问题。局部通风机是综掘工作面的主要通风设备,负责稀释、排放掘进过程释放出的瓦斯,同时将新鲜空气输送至综掘工作面,保证安全、良好的综掘工作环境。基于此,研究综掘工作面局部通风机管控系统并完成试验验证和试运行,达到综掘工作面安全、稳定、高效生产的目的。
1 综掘工作面瓦斯涌出分析
综掘工作面瓦斯从煤岩裂缝中涌出,涌出强度由低到高,伴随少量水和刺激性气味,不易被发现;瓦斯涌出量与煤层、岩层的瓦斯含量成正比,与地面大气压成反比,且与煤层开采深度、顺序以及回采方式有关。当瓦斯涌出现象持续且局部通风风量不足时,易导致综掘巷道内部瓦斯积聚,带来严重安全隐患。综掘工作面瓦斯涌出区域有煤壁瓦斯、落煤瓦斯两种[3-4]。

式中:V1为在t+1 时刻单位面积内的瓦斯涌出强度,m3/(m2·min);V0为t=0 时刻瓦斯的解析强度,m3/(m2·min);t为瓦斯涌出时间,min;α为瓦斯解析强度衰减系数;q为煤壁瓦斯涌出量,m3;D为煤壁外露面的周长,m;V为平均掘进速度,m/min;q0为煤壁瓦斯涌出强度,m3/(m2·min);L为综掘巷道的总长度,m。
落煤瓦斯即在外部作用力下,稳定状态煤层与原煤层发生分离,从高处落下并产生大小不一的裂隙,瓦斯从裂隙中涌出并在风力和瓦斯浓度梯度的作用下涌入综掘工作面。

式中:V2为单位面积内单位质量的落煤经t+1 时刻后的瓦斯涌出强度,m3/(m2·min);q1为落煤瓦斯涌出量,m3;S为综掘巷道横截面积,m2;γ为煤料密度,t/m3;W0为瓦斯原始含量,m3/t;Wc为残存瓦斯含量,m3/t。
2 局部通风理论分析
综掘工作面局部通风的目的是将掘进过程中产生的瓦斯、煤尘以及有毒有害气体稀释并排出巷道外部,保障综掘巷道的通风效果和安全性。局部通风机的风量与转速成正比,风压与转速的平方成正比,功率与转速的三次方成正比,即可通过控制局部通风机的转速实现局部通风机风量的自适应控制。一般采用变频调速原理,即通过控制电源频率对局部通风机的转速进行调节。

式中:Eg为感应电动势的有效值,V;f1为定子频率,Hz;Ns为定子每相绕组串联匝数;kNs为基波绕组系数;φm为每级的气隙磁通,WB。
由式 (5) 可知,通过控制感应电动势的有效值和定子频率可实现对磁通的控制。根据实际应用经验,局部通风机变频调速时的运行频率能够长期且稳定保持在 25~50 Hz,达到节能降耗的目的[6-7]。
选择局部通风机时需考虑综掘工作面风量、风速、温度、瓦斯涌出量、综掘工作面实际工作人数等因素。优选的局部通风机为对旋轴流局部通风机,具有双机自动切换、风流风压稳定、通风效率高、噪音低等特点,能够适应综掘工作面恶劣工况,保证局部通风系统正常、稳定、安全工作[5]。
3 总体设计
综掘工作面智能局部通风机管控系统需具备的功能有:①可完成常用局部通风机与备用局部通风机的无缝自动切换;② 可实现局部通风风机的智能变频调速;③可由地面监控室调节局部通风机的运行和倒机试验;④ 可完成局部通风机温度、电流、瓦斯、风速、风量、煤尘、CO、CO2、振动等参数的监测,当监测数据超出安全阈值时可进行声光语音报警;⑤ 地面监控室可实时记录局部通风机运行情况,对切换历史、切换时间、切换耗时、供电情况、设备故障等进行记录[8];⑥ 局部通风机控制系统可直接接入井下工业环网。根据综掘工作面智能局部通风机管控系统功能,总体设计结构如图 1 所示。

图1 智能局部通风机管控系统总体设计结构Fig.1 Overall structure of intelligent control system for local ventilator
4 硬件设计
4.1 硬件选型
综掘工作面智能局部通风机管控系统的核心硬件包括 DSP 处理器、瓦斯以及风速传感器等。
DSP 处理器型号为 TMS320F28335,32 位浮点型微处理器,配置有 88 个 GPIO 口、2 个 12 位 ADC、18 个 PWM 定时器、2 个 CAN 接口、3 个 SCI 接口、1 个 SPI 接口和 1 个 I2C 接口。该芯片具有能耗低、信号处理能力强、适应性强等特点,满足智能局部通风机管控系统设计要求[9-10]。
瓦斯传感器型号为 GJC4,测量范围为 0~4%,通气流量为 200 mL/min,频率为 200~1 000 Hz,供电电压为 DC 9~24 V。该传感器采用载体催化元件,能够精准检测空气中的瓦斯浓度并向关联设备发出信号,具有灵敏度高、非线性补偿、声光报警以及在线调零等特点[11]。
风速传感器选用的型号为 GFW15,测量范围为 0.4~15.0 m/s,测量误差 < 0.2 m/s;频率为 200~1 000 Hz,工作电压为 DC 9~24 V,可进行 4 位 LED 显示,报警方式为断续或声光报警。该传感器采用超声波测量原理,利用单片机和高集成电路采集风速数据且掉电数据不丢失。
4.2 传感器布置
综掘工作面智能局部通风机管控系统的瓦斯、风速传感器布置如图 2 所示。T1布置于综掘工作面巷道内,距迎头处 3~5 m;T2布置于综掘工作面掘进巷道内,距回风巷 10~15 m;T3布置于掘进巷道内,距掘进巷道 10~15 m。瓦斯报警浓度设置为≥1.0%,瓦斯断电浓度为≥1.5%,瓦斯复电浓度为<1.0%。风速传感器安装于综掘工作面巷道内的回风流处,距迎头处 10~15 m,用于监测回风流处的风速。
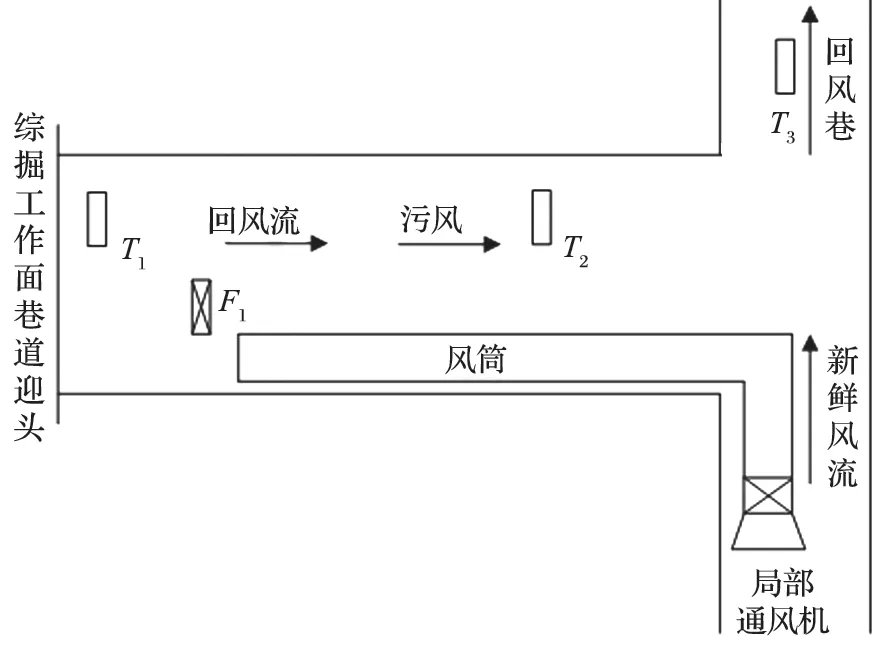
图2 综掘工作面瓦斯、风速传感器布置Fig.2 Layout of gas and wind speed sensor on comprehensively-mining work face
4.3 硬件电路设计
综掘工作面智能局部通风机管控系统硬件电路设计需满足局部通风管控系统模拟量采集与调理、通信、保护以及显示功能,结构如图 3 所示。

图3 智能局部通风机管控系统硬件设计结构Fig.3 Structure of hardware of intelligent control system for local ventilator
(1) 主控模块 包括 GPIO 转换电路、复位电路、时钟电路以及 JTAG 电路等,满足局部通风管控系统模数转换、逻辑判断、输出控制、计时复位等功能。
(2) 开关量输入输出模块 用于处理管控系统中的按钮、控制开关、继电器、指示灯、断路器信号;外扩光耦隔离器件,防止外部强电干扰和高压信号进入 DSP 芯片。
(3) 模拟量采集调理模块 利用运算放大器、电容电阻等元件对 4~20 mA 电流信号进行调理和滤波并转换为 0~3 V 电压信号,输入到 DSP 芯片 A/D 转换接口。
(4) 通信模块 外扩 SP3485EN 低功耗半双工芯片,设计 RS485 通信电路,用于 DSP 芯片与变频器通信。外扩 ENC28J60 独立以太网控制器,用于 DSP 芯片与井下工业环网通信。
(5) 电源模块 为适应井下供电电网电能质量不稳定的因素,由开关电源将 AC 36 V 整流降压后输出 DC 12 V,由线性稳压电源将 DC 12 V 逐级降压至 5、3.3、1.8 V,为 DSP 芯片、液晶显示屏、蜂鸣器等提供稳定电源。
(6) 人机交互模块 外扩 LDC1602 液晶显示屏,实时显示局部通风管控系统的运行参数、故障信息以及运行状态。同时可通过液晶显示屏上的按钮进行远程控制。
5 软件设计
5.1 算法设计
智能局部通风机管控系统算法基于模糊控制器实现,其设计流程如图 4 所示。根据局部通风管控系统设计要求设计模糊控制规则并写入至 DSP 寄存器。当综掘工作面巷道瓦斯浓度没有超限,则判断检测值与设定阈值的差值,选择对应的控制模式,通过查询模糊控制规则表,得到输入变量对应的输出频率,经反模糊化后得到变频器控制频率,经加权平均处理后得到控制局部通风机的运行频率。

图4 智能局部通风机管控系统算法设计流程Fig.4 Process flow of algorithm of intelligent control system for local ventilator
5.2 程序设计
5.2.1 主程序设计
基于 CCS (Code Composer Studio) 集成开发环境,采用 C 语言进行局部通风管控系统程序设计。智能局部通风机管控系统主程序需完成的工作有:①完成 DSP 寄存器、变量、常量的定义、赋值;② 完成 PIE 中断向量表、GPIO、EVB、A/D 模块的初始化;③执行定时器周期中断子程序;④ 比较并通过权重计算变频器输出频率;⑤ 等待并执行中断子程序并完成中断子程序保护工作;⑥ 扫描系统的电压、电流信号。
5.2.2 变频调速程序设计
智能局部通风机管控系统变频调速程序主要完成 DSP 控制器与变频器的通信与控制。DSP 控制器根据通信协议,发送控制指令、运行模式、控制模式、最大转速限制等指令,采用模糊控制算法,使得变频器能够根据综掘工作面巷道内瓦斯等气体浓度以及风速,实时调节局部通风机转速。
5.2.3 控制模式程序设计
智能局部通风机管控系统控制模式分为自动通风模式、自动排瓦斯模式、手动工作模式 3 种。自动通风模式即在瓦斯浓度不超标的前提下,根据巷道内CO 含量、煤尘含量、温度等条件综合控制风机转速。自动通风模式软件流程如图 5 所示。自动通风模式的运行条件为综掘工作面迎头、回风区瓦斯浓度低于设定阈值;综掘工作面巷道瓦斯、温度、CO 及煤尘含量任何一个监测点实时值超过设定阈值时,快速切换至自动排瓦斯模式。在自动排瓦斯模式运行下,当综掘工作面迎头瓦斯浓度 > 1.5% 时,变频调速装置停止制动;当综掘工作面迎头瓦斯浓度、回风区瓦斯浓度小于设定阈值时,变频调速装置重新启动。

图5 自动通风模式软件流程Fig.5 Process flow of software in automatic ventilation mode
自动排瓦斯模式的运行条件为任何一个监测点实时瓦斯浓度高于设定阈值;切换条件为所有监测点实时瓦斯浓度都小于设定阈值后,进入自动通风模式。自动排瓦斯模式软件流程如图 6 所示。手动工作模式的运行条件为通过按钮硬切换至手动工作模式,变频装置输出频率与预设频率一致,各处的瓦斯浓度不对变频装置输出频率产生影响。

图6 自动排瓦斯模式软件流程Fig.6 Process flow of software in automatic gas exhaust mode
5.2.4 人机界面程序设计
智能局部通风机管控系统人机界面程序设计基于组态软件实现,DSP 控制器以 RS485 通信模式将局部通风机管控系统运行时的运行状态数据、参数信息、故障信息等传送至人机界面平台。人机界面平台根据约定的通信协议进行解析,并将解析后的数据存储至本地内存。基于组态软件设计主控制界面、运行状态界面、参数设置界面、故障信息界面,将接收到的数据逆行实时显示;同时,通过该人机界面可实现对局部通风机的启停、无缝切换控制。
6 试验验证
以 FBDNo.6.3 型矿用隔爆型对旋轴流局部通风机进行试验验证,该局部通风机的额定功率为 2×30 kW,额定电压为 660 V,额定电流为 32.9 A,额定频率为 50 Hz,额定转速为 2 950 r/min,输出风量为 420~480 m3/min。利用 0~5 mA 电流信号发生器模拟瓦斯传感器输出信号;利用 0~200 mA 电流信号发生器模拟风速传感器输出信号,将风速控制在 1~2 m/s。通过修改电流信号发生器的输入信号模拟综掘工作面实际工况,得到不同的风机运行频率,利用模糊控制算法得到实时的输出频率,根据综掘巷道内瓦斯传感器浓度在自动通风、自动排瓦斯以及手动模式之间切换。智能局部通风机管控系统如图 7 所示。

图7 智能局部通风机管控系统Fig.7 Intelligent control system for local ventilator
在试验过程中,当回风巷道内瓦斯浓度≤0.6%,系统处于自动通风模式;当回风巷道内瓦斯浓度>0.6% 且<1.0% 时,系统处于自动通风模式,并根据T2、T3处的瓦斯浓度适当增加风机转速,防止回风流处瓦斯积聚;当回风巷道内瓦斯浓度≥1.0% 时,系统处于自动排瓦斯模式,维持风机低速运行,防止回风流处瓦斯积聚,达到瓦斯超限排放的目的。智能局部通风管控系统根据瓦斯、风速传感器采集量,基于模糊控制算法对局部通风机进行变频调速控制,降低局部通风系统能耗,达到节能降耗的目的。
7 结语
针对综掘工作面局部通风机智能建设问题,研究了综掘工作面瓦斯涌出特点、局部通风机理论,基于 TMS320F28335 控制器完成局部通风机管控系统的总体设计、软硬件设计以及试验验证。试验验证结果表明该局部通风管控系统提升了综掘工作面通风监测系统的智能化水平,改变了“一风吹”现象,达到了通风监测系统智能化的目标。
猜你喜欢
红蜻蜓·低年级(2022年12期)2022-12-20 03:10:34
现代畜牧科技(2021年9期)2021-10-13 06:38:46
矿产勘查(2020年9期)2020-12-25 02:54:06
建材发展导向(2019年5期)2019-09-09 09:22:16
山东工业技术(2016年15期)2016-12-01 05:31:08
现代食品(2016年14期)2016-04-28 08:10:47
江西煤炭科技(2015年1期)2015-11-07 03:06:32
江西煤炭科技(2015年1期)2015-11-07 03:06:32
山西焦煤科技(2015年7期)2015-02-28 19:51:13
河南科技(2014年19期)2014-02-27 14:15:37
