
基于改进型恒虚警的毫米波雷达检测算法*
2023-01-16 15:05毛芃晖
通信技术 2022年11期
胡 东,毛芃晖
(杭州电子科技大学,浙江 杭州 310018)
0 引言
毫米波雷达已被广泛应用于智能驾驶[1-2]、交通管制[3]、动态检测[4]、避障预警[5-7]等技术中。随着应用范围的不断扩大,目标检测的环境也越来越复杂,恒虚警检测技术作为毫米波雷达目标检测的关键技术,对于毫米波雷达的检测性能起到决定性作用[8],是决定毫米波雷达能否准确及时地检测出目标的重要因素,也是后续一切规划和决策的基础。
毫米波雷达恒虚警(Constant False Alarm Rate,CFAR)算法众多,其中,均值类恒虚警中的单元平均恒虚警(Cell Averaging CFAR,CA-CFAR)在均匀环境下具有极佳的检测性能,但是当有多个目标出现时,CA-CFAR 的检测性能会迅速下降,出现目标遮蔽效应。为了克服多目标环境下检测性能下降的问题,最小选择恒虚警(Smallest of CFAR,SO-CFAR)与有序统计恒虚警(Order Statistics,OS-CFAR)检测器相继被提出,这两种算法在一定程度上提高了多目标环境下的检测性能,但也带来了在其他环境下出现的检测性能损失的问题。为此,Smith 等人[9]提出了变化指数恒虚警检测器VICFAR。VI-CFAR 作为一种自适应恒虚警,能够根据背景环境选择合适的检测器,在均匀环境和杂波边缘环境下都有较好的表现,并且在多目标环境也有一定的抗干扰能力。但是当参考窗中出现大量的干扰目标时,VI-CFAR 的检测性能会大幅度下降,毫米波雷达的漏警率会迅速提升,导致检测精度下降。为了提升毫米波雷达在多目标环境下的检测性能,在VI-CFAR 算法的基础上提出了一种改进的VI-CFAR(KVI-CFAR)。该算法在多目标环境下采用KL 散度单元筛选恒虚警(Kullback-Leibler Trimmed Mean CFAR,KLTM)[10]作为处理策略,提升了毫米波雷达在多目标环境下的检测概率,具有稳定的抗干扰能力。
1 算法原理
KVI-CFAR 检测器由CA-CFAR、SO-CFAR、KLTM-CFAR 这3 种检测器组成,可以根据背景环境自适应地选择合适的检测策略。
1.1 VI-CFAR 检测器
VI-CFAR 通过利用参考单元作为样本来对背景环境进行判断,然后选取合适的CFAR 检测器进行处理。要对背景环境做出判断需要用到二阶统计量VI 和参考窗均值之比(Mean Ratio,MR),其中VI 用于判断前后参考窗是否均匀,MR 用来判断前后参考窗均值是否相同[11]。VI-CFAR 检测器原理如图1 所示。图中的D 为待检测单元,前窗采样值为xi(i=1,…,n),后窗采样值为yj(j=1,…,n),α为门限系数,Z为总的背景功率水平估计值,T为检测器的检测门限。

图1 VI-CFAR 原理

将VI与检测器统计比较门限值KVI进行比较来判别背景环境是否均匀,判别方法如下:

MR的定义为前后参考窗的均值之比,即:

将MR与MR的比较门限值KMR相比来判断前后均值是否相同,判别方法如下:

通过式(2)和式(4)来判别前后参考窗是否均匀以及前后参考窗均值是否相同,并以此为依据判断当前的背景环境,然后通过背景环境来选择合适的CFAR 检测器,具体的选择策略如表1 所示。
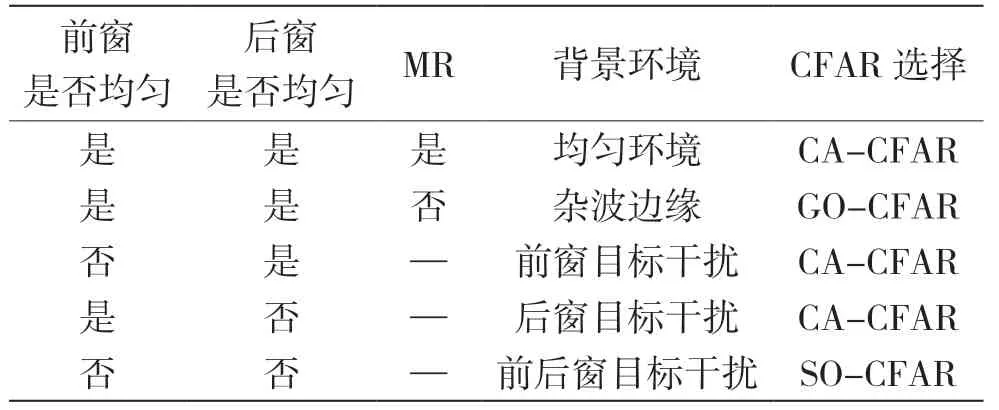
表1 VI-CFAR 选择策略
1.2 KLTM-CFAR 检测器
KLTM-CFAR 的原理如图2 所示,该检测器首先通过计算有序排列样本中不同数据段与第一段数据之间的KL 散度(Kullback-Leibler Divergence,KLD)(两分布差异的度量准则)值,找出最大值所在位置;其次利用大津法[12]计算KLD 的分割门限值,将大于门限的值剔除,并将剔除数据的个数进行记录,通过剔除数据个数和检测概率来计算标称因子得到检测门限;最后与检测门限进行比较判决[13]。

图2 KLTM-CFAR 的原理
将参考单元的数据从小到大排序后,将有序数据分为n个整数段,每段有k个数据,再分别对每段数据求标准差,其计算式为:

式中:n为分段数;k为每段数据的个数;σj为第j段数据的标准差。
通过标准差计算每段数据与第一段数据的统计特性差异KLD,计算方法为:
利用大津法来计算分割门限,具体步骤为通过某一门限分割出两个区域,以两个区域的类间方差作为指标,计算类间方差的最大值即为分割阈值[14]。类间方差定义为:

式中:ω1=N1/N,N1为区域1 的数据单元个数,N为总的数据单元个数;ω2=N2/N,N2为区域2 的数据单元个数;μ1,μ2为区域1 和区域2 的KLD 均值。μ1,μ2的计算方法为:


最后求得阈值D为:

将统计的删除数据个数记为r2,r1=0。根据虚警率Pfa与删除数据个数r2来计算标称因子T,标称因子T的计算过程为:
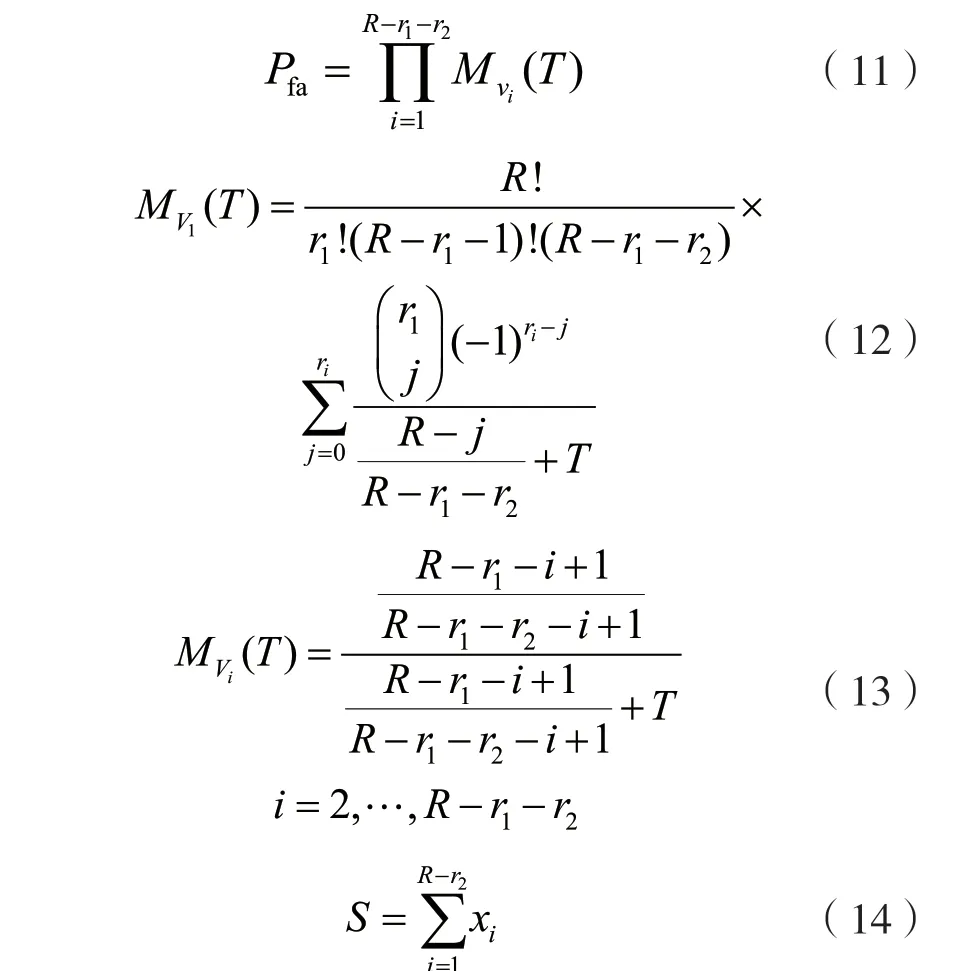
将求得的T与数据单元和值S(式(14))相乘得到判决门限,通过判决门限来判别目标是否存在。判别方法如下:

1.3 KVI-CFAR 检测器
KVI-CFAR 的选择策略如表2 所示,由于CACFAR 与GO-CFAR 在均匀环境和杂波边缘环境下表现较为出色,所以在KVI-CFAR 中仍然选择这两种检测器作为选择策略,在多目标环境下选择了检测性能更好的KLTM-CFAR。该检测器的优势在于,在多目标环境下不需要干扰目标的先验信息,且在干扰目标数较多的情况下仍具有良好的检测性能。

表2 KVI-CFAR 选择策略
2 仿真实验与结果分析
为了验证KVI-CFAR 检测性能的优势,在毫米波雷达中采用蒙特卡罗方法[15],对各CFAR 检测器进行仿真实验,仿真次数为105次,在均匀环境和多目标环境下设定参考单元长度为16,Pfa=10-6,KVI=4.76,KMR=1.8,OS 取K=12 时有序统计量的值,OSVI 取K=6 时有序统计量的值。
2.1 均匀环境分析
图3 为均匀环境下CA、VI、OS、OSVI、KVI的检测性能对比。从图中可以看出,OSVI、VI、KVI 具有比较接近的检测性能,其中CA 在均匀环境下检测性能最好。为了更直观地分析各检测器在均匀环境下的检测性能,选取了当检测概率为0.5时各检测器相比于CA 的信噪比损失,如表3 所示。
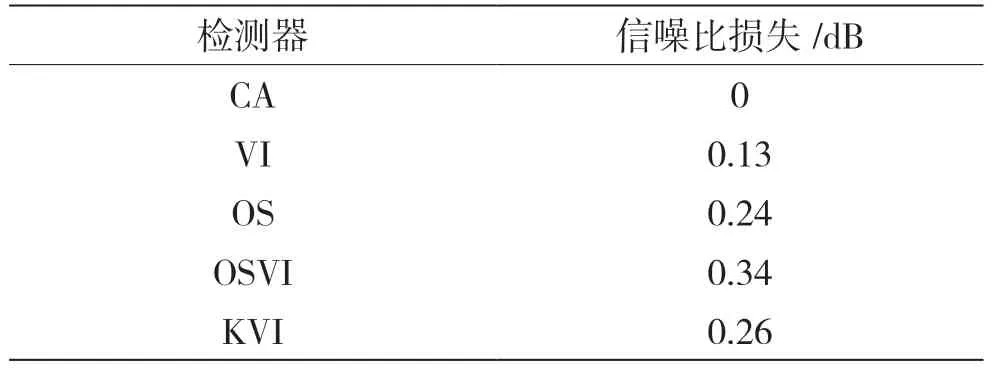
表3 检测概率为0.5 时,各检测器相比于CA 的信噪比损失

图3 均匀环境下的检测性能比较
2.2 杂波边缘环境分析
设定虚警率Pfa=10-4,参考单元长度为32,OS-CFAR 序值K=24,OSVI-CFAR 序值K=12。各CFAR 检测器的虚警控制能力如图4 所示,从图中可以看出,CA 在杂波边缘环境下虚警控制能力较差,OSVI、VI 以及KVI 虚警控制能力基本相同。虚警控制能力由高到低依次为VI-CFAR、KVICFAR、OSVI-CFAR、OS-CFAR、CA-CFAR。

图4 杂波边缘环境下的虚警控制能力比较
2.3 多目标环境分析
考虑到干扰目标可能存在于单侧窗或双侧窗,且单侧前沿干扰与后沿干扰基本类似,所以本实验单侧干扰选定窗为前沿窗,将分别对单侧干扰和双侧干扰两种情况进行仿真分析。
图5 所示为参考窗单侧存在1 个干扰目标时检测性能的比较。当存在干扰目标时,CA 的检测性能迅速下降,信噪比为30 时CA 检测概率为0.76。其他几种检测器仍保持着较好的检测性能,其中,OS 的检测性能优于OSVI,这是因为随着信噪比的增大,OSVI 选择单侧窗的概率增大,参考窗的长度只有OS 的一半,因此造成了一定的信噪比损失[16]。KVI 由于可以滤除干扰目标,所以有着不错的检测性能。
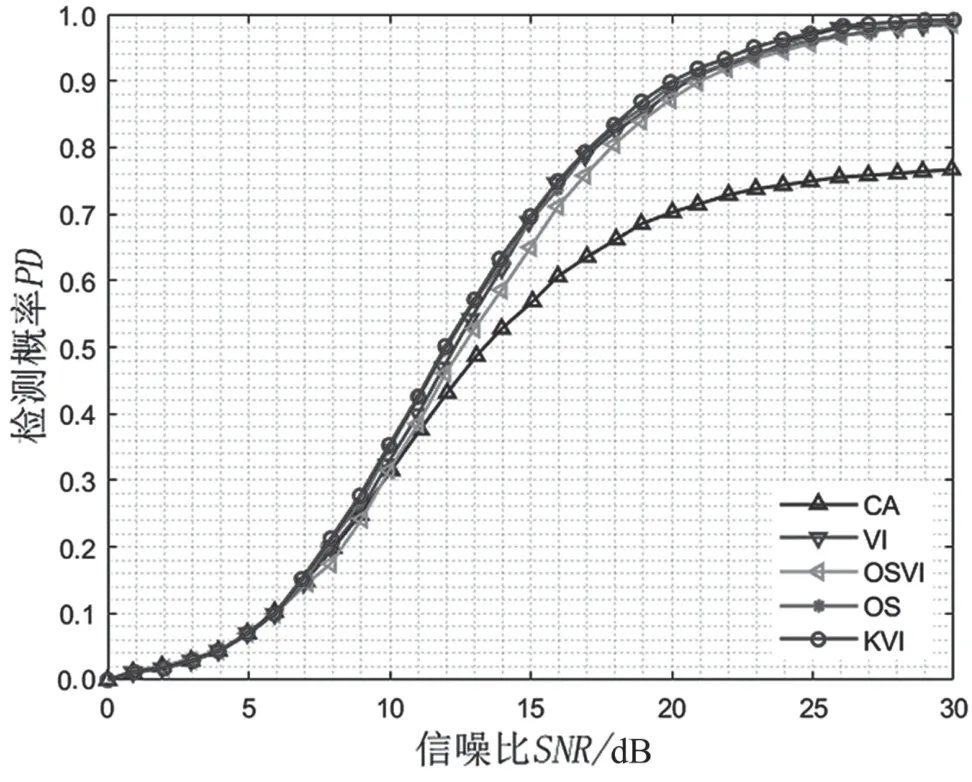
图5 单侧1 个干扰目标检测性能比较
图6 和图7 分别为单侧存在3 个和5 个干扰目标时的检测性能比较。随着干扰目标数的增加,VI和CA 的检测概率进一步下降。从图6 可以看出,当单侧出现3 个干扰目标时,OSVI 由于达到了最大干扰目标数的容限,检测性能急剧下降。当信噪比为30 dB 时,OSVI 检测概率为0.46,OS 检测概率为0.505。当单侧出现5 个干扰目标时,其他几种检测器基本没有检测能力了,此时KVI 仍然保持着较好的检测能力。

图6 单侧3 个干扰目标时的检测性能比较
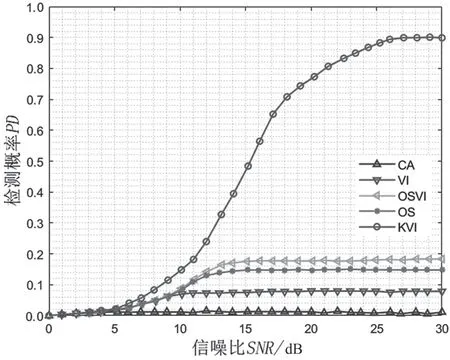
图7 单侧5 个干扰目标时的检测性能比较
图8 为双侧存在1 个干扰目标时的检测性能比较,其中,CA 与VI 的检测性能都出现了较为明显的下降,而OS、OSVI、KVI 保持着较好的检测性能。VI 检测性能下降的原因主要是在多目标环境下VI的选择策略为SO,当两侧参考窗都出现干扰目标时,SO 的检测性能会急剧下降。由于OS 与OSVI都属于有序类恒虚警,对干扰目标的位置不敏感,所以未出现检测性能迅速下降的情况。
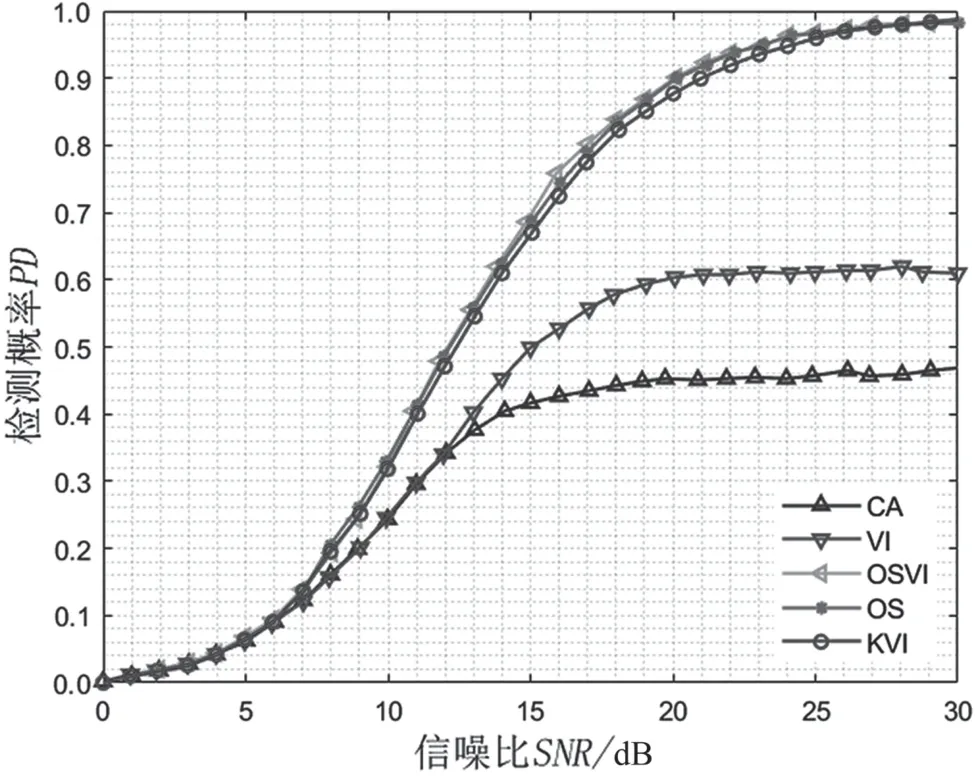
图8 双侧各存在1 个干扰目标时的检测性能比较
图9 为双侧存在2 个干扰目标时的性能比较,其中,OS 和OSVI 的检测性能急剧下降。信噪比为30 时,OS 的检测概率为0.5,OSVI 为0.53,VI与CA 的检测概率也下降为0.259 和0.098。图10为双侧存在4 个干扰目标时的检测性能比较,除了KVI,其他检测器已经检测不到目标了,而此时KVI 的检测概率在0.9 左右,表现出了较强的抗干扰 能力。

图9 双侧各存在2 个干扰目标时的检测性能比较
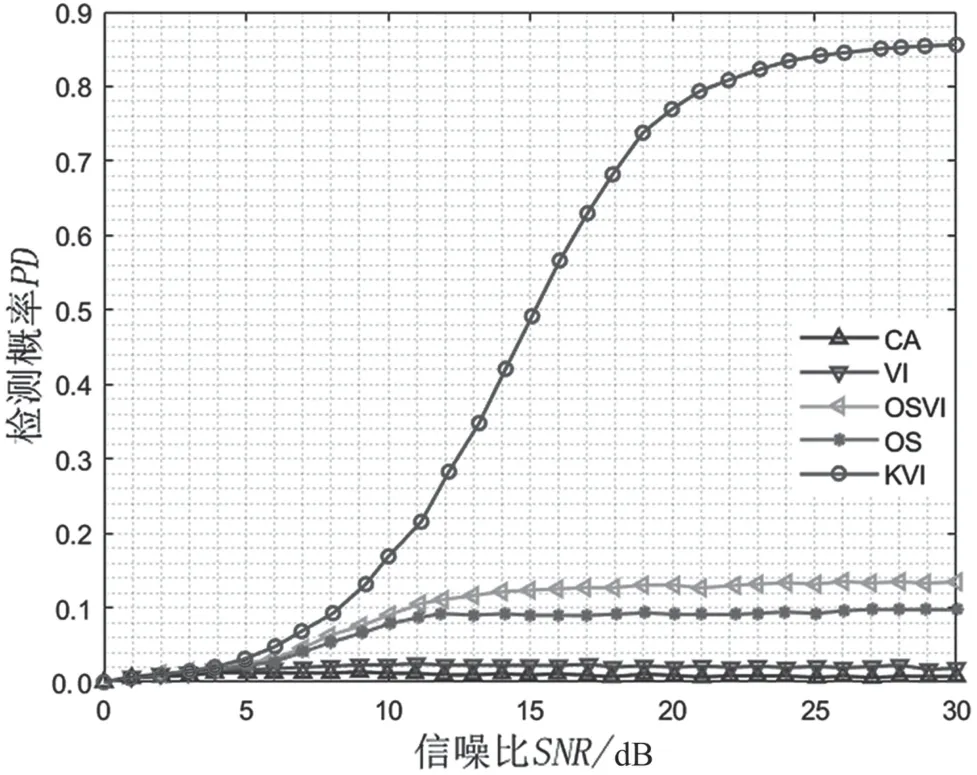
图10 双侧各存在4 个干扰目标时的检测性能比较
3 结语
本文通过对毫米波雷达常见恒虚警检测算法的分析,提出了一种基于VI-CFAR 算法的改进型恒虚警检测算法KVI-CFAR。本文简要阐述了KVICFAR 算法的原理,并在不同背景环境下将KVI 算法与其他几种检测器进行了性能对比分析。结果表明,在多目标环境下,KVI-CFAR 相比于VI 和OS类算法具有一定的优势,能够有效提高毫米波雷达在多目标环境下的检测概率,并能够提升毫米波雷达的检测精度,具有一定的实际应用价值。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
装备维修技术(2020年19期)2020-03-08
数字通信世界(2020年2期)2020-03-04
物联网技术(2019年9期)2019-11-06
火力与指挥控制(2019年4期)2019-06-14
火力与指挥控制(2018年10期)2018-11-13
科学与财富(2017年24期)2017-09-06
科技视界(2017年10期)2017-08-21
中国交通信息化(2017年9期)2017-06-06
