
机器人应用对区域经济收敛的影响*
2023-01-15 07:16:40金玥昀潘士远詹御涛
浙江社会科学 2023年1期
□ 金玥昀 潘士远 詹御涛 钱 滔
内容提要 本文把机器人视为一种生产要素,在新古典经济增长模型框架下研究了机器人应用对区域经济收敛的影响。在此基础上,本文以2011—2018 年中国228 个地级市作为研究对象,对模型的理论预测进行实证检验。研究表明:第一,中国区域经济存在收敛情况;第二,机器人的应用促进区域经济加速收敛,有利于缩小区域间收入差距,实现共同富裕;第三,机器人应用对中国中西部地区经济收敛的促进作用更为显著。本文还提出对企业购置工业机器人给予财政补助、对工业机器人采用加速折旧或对工业机器人折旧采用加计扣除税收优惠、着力推动中西部地区工业机器人应用等政策建议。
一、引言
促进数字技术与实体经济深度融合,赋能传统产业转型升级,从而催生新产业新业态新模式,为我国经济的高质量发展指明了方向。人工智能作为新一代信息技术的重要代表,将成为我国未来十年推动经济高质量发展的重要保障和核心驱动力。工业机器人是人工智能在工业部门最重要的应用之一,自2013 年工信部出台《关于推进工业机器人产业发展的指导意见》以来,中国不断推进工业机器人的应用推广,工业机器人保有量逐年快速上升,并在2016 年超越日本成为世界上工业机器人存量最大的国家。①
经济收敛是指一定范围内不同地区或国家其初期指标与经济增速之间存在负相关关系,即初始发展水平较低的国家或地区的发展速度会更快,初始发展水平较高的国家或地区的发展速度会更慢,从而导致各个国家或地区发展水平趋于一致。因此,经济收敛是地区均衡发展的重要标志,也是实现共同富裕的基础。党的二十大报告把实现全体人民共同富裕摆在更加重要的位置,指出“中国式现代化是全体人民共同富裕的现代化”。中国幅员辽阔、人口众多,各地区自然资源禀赋差别巨大,区域发展不平衡是阻碍人民群众福祉普遍提升和实现共同富裕的重要因素之一。有效缩小区域发展差距,是我国解决城乡差距和收入差距问题、促进共同富裕的重要保障(刘培林等,2021)。因此,在高质量发展中促进共同富裕的背景下,研究机器人应用对经济收敛的影响具有重要的理论和现实意义。
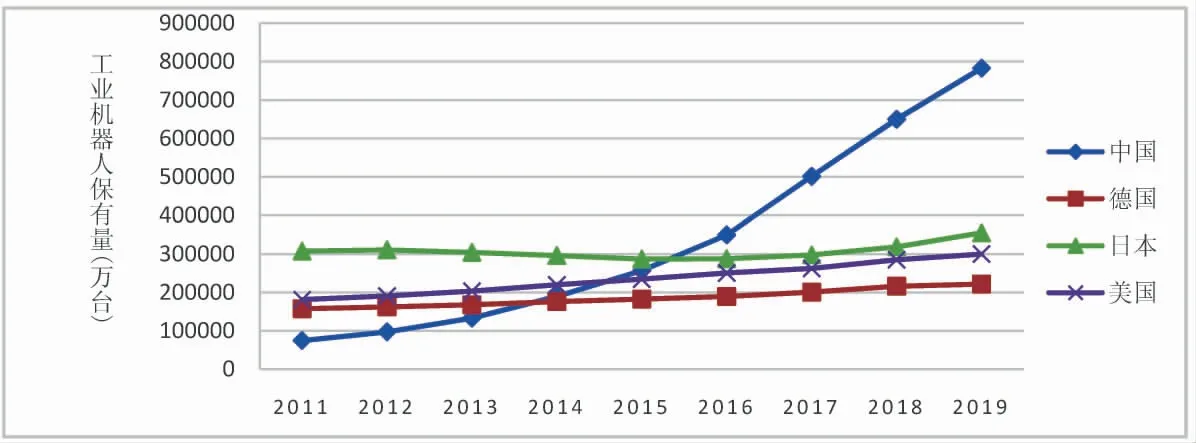
图1 2011—2019 年主要国家工业机器人保有量②
现有文献以新古典增长理论(Solow,1956)或内生经济增长理论(Romer,1986)为研究基础,对经济收敛存在性及其影响因素开展研究。经济增长存在多种收敛形态,主要包括α 收敛、β 收敛和俱乐部收敛。α 收敛意味着随着时间的推移,区域间人均收入的分散程度逐渐变小(Barro &Sala-i-Martin,1992)。β 收敛意味着落后地区的经济增长率将高于发达地区,以更快增速追赶上发达地区,两者的经济发展水平将会趋于一致(Barro &Salai-Martin,1992),收敛速度会受到资本要素、人力资本、产业结构等各方面的影响(Mankiw et al.,1992;林毅夫,2002;沈坤荣和马俊,2002)。俱乐部收敛意味着一个国家或地区内部不同区域表现出相似的收敛趋势,即初始经济条件相似的地区发展趋同,但区域之间不存在相互趋同的现象(Wang,2008)。工业化水平、产业结构、人力资本、市场结构以及经济开放程度等因素都会对俱乐部收敛产生显著影响。③有研究表明机器人应用有利于全要素生产率的提升,进而促进经济增长(Kromann et al.,2020)。相反,Acemoglu et al.(2018)认为自动化所导致的劳动力市场摩擦和不完善,可能在短期内造成资本和劳动配置不当,阻碍劳动生产率的提升。机器人的使用会抑制工资增长,从而抑制投资增长,最终会导致经济的停滞(Gasteiger &Prettner,2017)。而且,自动化或机器人应用可能会损害竞争、消费者隐私和消费者选择,可能会带来经济和社会成本,如果没有适当监管的话,过度自动化工作,会造成非市场化影响,如工人会失去工作或被迫从事低收入工作,加剧不平等(Acemoglu,2021)。
国内学者借鉴国外理论,运用中国数据,探究了机器人应用对中国制造业就业的影响(王永钦和董雯,2020),以及对劳动生产率的影响(胡晟明等,2021)。与现有文献不同,本文把机器人视为一种生产要素,在新古典经济增长模型框架下研究了机器人应用对经济收敛的影响,并以2011—2018 年中国228 个地级市作为研究对象,实证检验了模型的理论结果。结果显示:第一,中国地级市之间存在着经济发展的收敛;第二,工业机器人应用有助于区域经济差距加速缩小,能够促进区域共同富裕的实现;第三,从东中西分板块看,工业机器人应用对中国中西部地区经济收敛的促进作用比东部地区更为显著。
本文可能的贡献在于:第一,本文将机器人作为生产要素纳入新古典生产函数,在新古典经济增长理论中研究了机器人应用对经济收敛的影响,这具有一定的理论意义;第二,本文使用地级市相关数据合理构造工业机器人渗透率,对机器人应用加快经济收敛的作用做了详细的实证分析,为中国机器人应用加速区域经济增长收敛提供了实践证据;第三,本文从区域经济收敛的视角探究了机器人应用对共同富裕的助力作用,对于如何进一步强化机器人应用效率以缩小区域收入差距,进而促进共同富裕具有较强的现实意义。
本文剩余部分安排如下:第二部分是理论模型与假说;第三部分是模型设定与数据;第四部分是实证结果与分析;第五部分是稳健性检验;第六部分是结论和建议。
二、理论模型与假说
本文以Solow(1956)为基础,构建涵盖资本、劳动力、机器人三种要素的经济增长模型,来探究机器人应用对经济收敛的影响。与Solow(1956)一样,本文假设:经济是封闭的,生产唯一的一种最终产品;资本品和消费品之间可以一对一转换;储蓄率、人口增长率和技术进步均为外生;时间是连续的。
为考察机器人应用对经济收敛的影响,本文假设t 时期企业的生产函数满足柯布道格拉斯(Cobb-Douglas)生产函数形式:④

其中,Y(t)为企业t 时期的产量,K(t)为企业的资本存量,M(t)为企业在机器人应用方面的资本投入,⑤A(t)为企业的技术水平,L(t)为企业投入的劳动,α 为企业资本投入的份额,β 为机器人投入的份额。
假设L 和A 分别以外生速率n 和g 增长,初始的劳动数量和初始的技术水平为L(0)和A(0):

定义A(t)L(t)为有效劳动,其数量以n+g 的速率增长。
在连续时间下,资本积累方程和机器人应用积累方程可表述为:

定义k 为每单位有效劳动的平均资本量、y为每单位有效劳动的平均产量、m 为每单位有效劳动的平均机器人应用量。可将式(1)写为:


将式(7)、式(8)代入式(6),可知在平衡增长路径上,人均有效资本、人均有效机器人和人均有效产出分别为:

为了探究经济向平衡增长路径收敛的速度大小,将式(6)对数线性化可得:

式(12)两边对t 求导得:

该方程表明,在平衡增长路径附近,logy 移向logy*的速度几乎与logy 和logy*之间的距离成比例。也就是说,logy(t)-logy*的增长率近似于一个固定常数ρ。对于经济收敛速度ρ,本文有如下命题。
命题1:当加入机器人应用这一生产要素后,新古典经济增长模型的经济收敛速度为ρ=(2-α-β)(n+g+δ)。
证明:由式(13)可知:
当logy=logy*时,y=y*,则:

在标准的新古典经济增长模型中,经济收敛速度为λ=(1-α)(n+g+δ)。⑥ρ>λ,故命题1 表明机器人应用提高了经济收敛速率。基于上述理论分析,本文提出以下假设。
假设:机器人应用能加速中国区域经济收敛。
三、模型设定与数据
(一)模型设定
首先,本文构建模型(20)和模型(21)来检验中国区域经济收敛的存在性,具体如下:
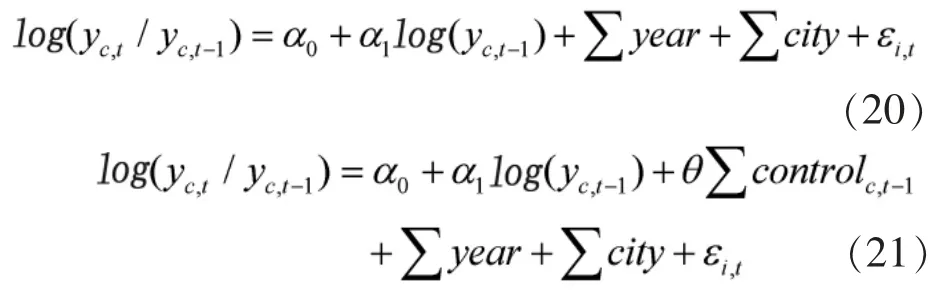
其中,log(yc,t)是指观察期的人均产出对数值,log(yc,t-1)是指观察期上一期的人均产出对数值。α1代表收敛情况,α1<0 表示经济收敛,反之则表示经济发散。∑year 代表年份固定效应,∑city 代表地区固定效应,∑controlc,t-1代表地区控制变量,εi,t为随机干扰项。
其次,构建模型(22)和模型(23)来检验机器人应用能加速中国区域经济收敛的假设,具体如下:
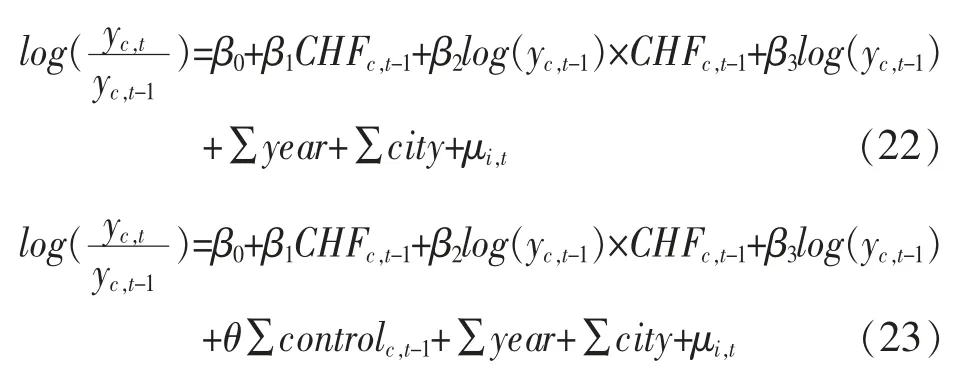
其中,c 为地区,t为年份,CHFc,t-1表示上一期的工业机器人渗透率,log(yc,t-1)×CHFc,t-1表示上一期人均真实GDP 对数值与工业机器人渗透率的交互项,∑year 代表年份固定效应,∑city 代表地区固定效应,∑controlc,t-1代表地区控制变量,μi,t为随机干扰项。
(二)变量定义和解释
1.被解释变量
本文使用人均实际GDP 增长率的对数(log(yc,t/yc,t-1))作为被解释变量。人均实际GDP 的计算方式为:利用城市名义GDP 以2004 年为基期进行不变价处理,再除以城市年末人口数得到人均实际GDP。
2.解释变量
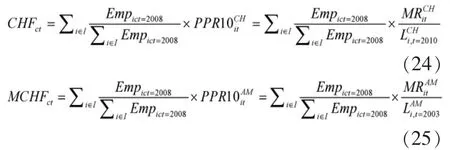
本文以人均实际GDP 的对数(logy)和工业机器人渗透率(CHF)作为主要解释变量。考虑到数据可得性和科学性,本文使用不同年份地区层面每百万人中工业机器人的使用台数计算工业机器人渗透率。由于农业和部分服务业(如教育行业)机器人使用量非常少,同时中国农业和部分服务业的劳动力数据统计口径较小,本文选取了采矿业,建筑业,供电供气供水业三个大类和制造业(细分为13 个小类),并将其与国际机器人联合会(IFR)数据库进行匹配。⑦本文选取地级市法人单位行业就业人数作为行业就业人数的代理变量。本文参考Acemoglu et al.(2020)、赵春明等(2020)构建了以2010 年为基期的区域工业机器人渗透率及其工具变量,⑧具体如下:
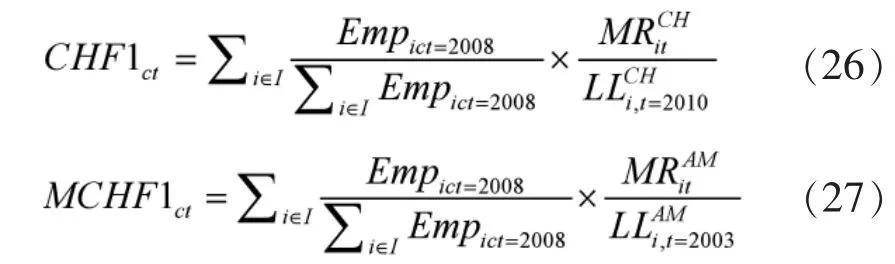
为了排除剩余行业和缺失地区的影响,本文使用不同的数据集构建CHF1ct和CHF2ct,以及相对应的工具变量MCHF1ct和MCHF2ct,用来进行稳健性检验。
首先,构建涵盖农业、部分服务业的工业机器人渗透率CHF1ct和MCHF1ct,包括农林牧渔业,教育,采矿业,建筑业,供电供气供水五大类行业和制造业(细分为13 个小类),具体如下:
其次,构建全国范围的工业机器人渗透率CHF2ct和MCHF2ct。由于8 个省份制造行业的细分行业就业人数无法获得,现将地区行业分为农林牧渔业,采矿业,供电供气供水行业,建筑业,教育,制造业(不再细分为13 个小类)六大类行业与IFR 数据库进行匹配,以获得全国范围的工业机器人渗透率。
3.控制变量
控制变量为表1 中列示的变量,变量定义及说明如下:
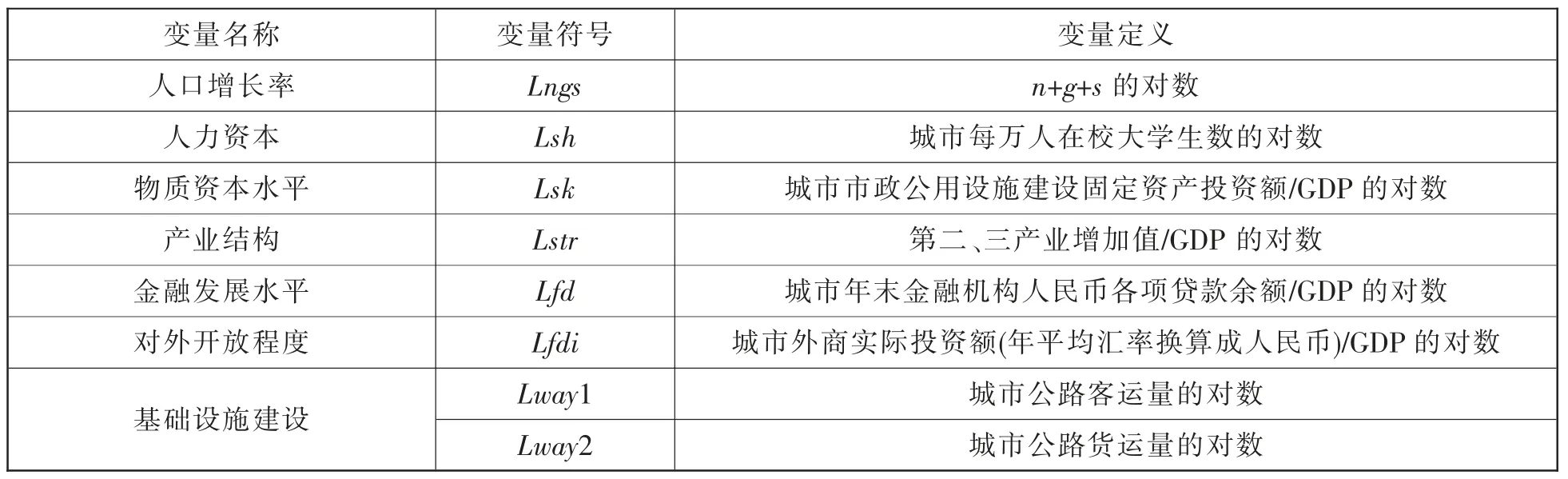
表1 控制变量定义
(1)人口增长率(Lngs)。该指标为人口自然增长率n、技术进步率g 以及折旧率s 和的对数。在本文中,n 为城市人口自然增长率,同时参考Mankiw et al.(1992)、Romer(1986)假设g+s=0.05。
(2)物质资本水平(Lsk)。参考张传勇和刘学良(2017)等的做法,将固定资产投资占GDP 的比重作为物质资本水平的代理变量,但由于城市固定资产投资额数据缺失严重,本文选择城市市政公用设施建设固定资产投资额除以GDP 的对数作为物质资本水平的代理变量。
(3)人力资本(Lsh)。本文参考沈坤荣和马俊(2002)等的做法选择城市每万人在校大学生数的对数作为人力资本的代理变量。
(4)产业结构(Lstr)。本文参考张传勇和刘学良(2017)的做法,选择第二、三产业增加值除以GDP 的对数作为产业结构的代理变量。
(5)金融发展水平(Lfd)。本文参考杨友才(2014)的做法,选择城市年末金融机构人民币各项贷款余额除以GDP 的对数作为金融发展水平的代理变量。
(6)对外开放程度(Lfdi)。本文参考刘生龙和胡鞍钢(2010)等的做法,选择城市外商实际投资额(年平均汇率换算成人民币)除以GDP 的对数作为对外开放程度的代理变量。
(7)交通基础设施建设(Lway1、Lway2)。本文选择城市公路客运量的对数和城市公路货运量的对数作为交通基础设施建设的代理变量。
(三)数据来源
本文选取了2011—2018 年中国228 个地级市的数据作为研究的基础数据。其中,城市名义GDP、年末人口数来源于《中国城市统计年鉴》;国内生产总值指数来源于国泰安数据库;工业机器人数据来自IFR;中国分行业就业数据来源于《中国工业统计年鉴》;美国分行业就业数据来自美国劳工统计局;相关城市控制变量来源于《中国统计年鉴》、《城市统计年鉴》、《中国建设统计年鉴》和Wind 数据库。
(四)描述性统计
从表2 中可以看出2011—2018 年中国228个地级市中,人均产出为42821 元,最小值为5304 元,最大值为186356 元,标准差为27524元,表明各地经济发展水平差异非常大;工业机器人渗透率CHF 的均值为0.0617,其中最小值为0.000932,最大值为0.633,标准差为0.0722,表明各地的工业机器人渗透率差异也非常大,工业机器人的应用水平很不平衡。
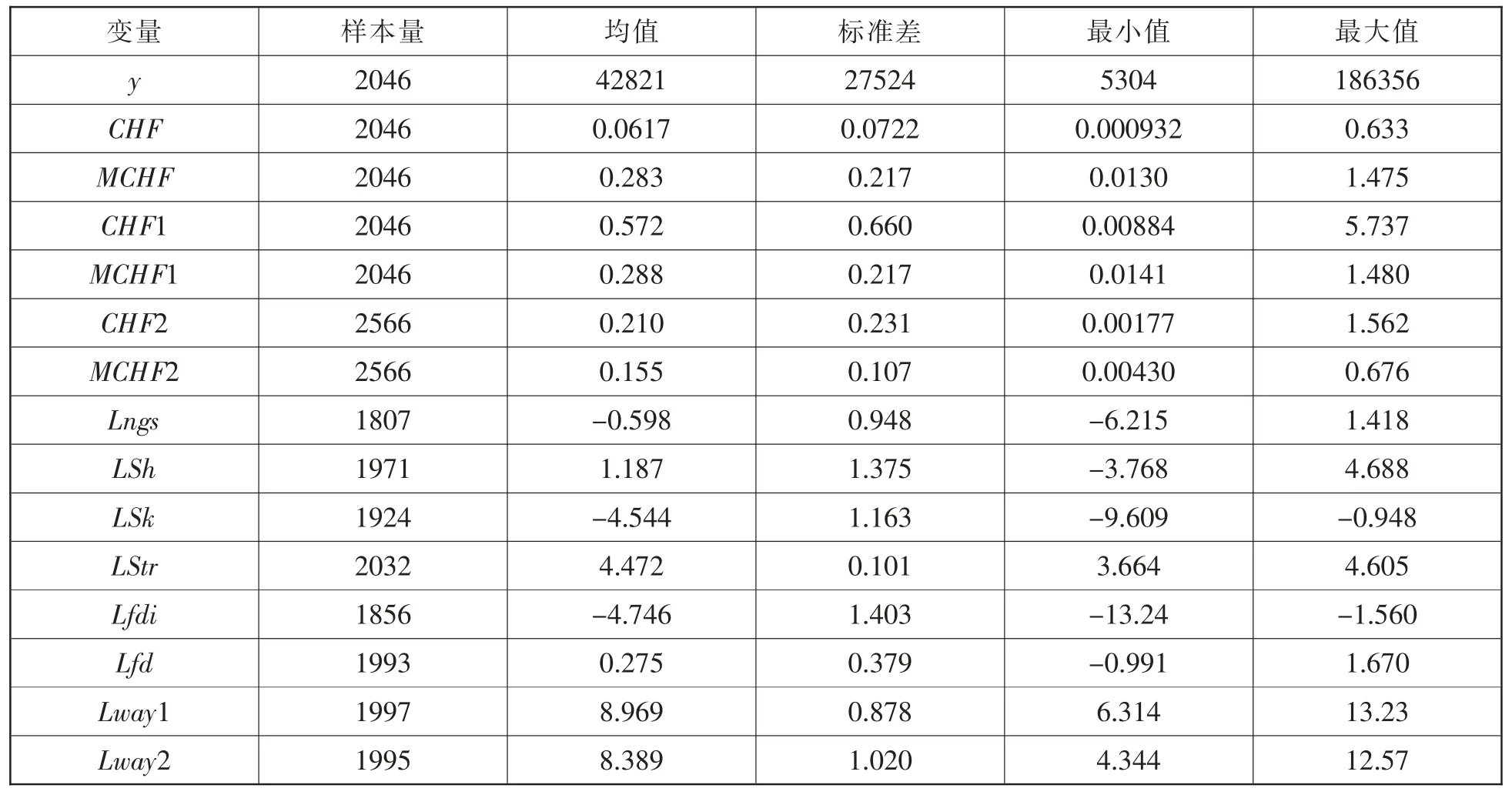
表2 主要变量的描述性统计⑩
四、实证结果与分析
本节将报告中国区域经济收敛情况、机器人应用对中国区域经济收敛速度的影响,以及中国东中西部地区的异质性分析结果。
本文运用面板数据回归模型进行实证检验。首先对模型进行VIF 检验,以判断模型是否存在多重共线性。这是因为,若模型中变量之间高度相关,可能使回归的结果混乱,甚至会对估计值的正负方向产生影响,从而造成结果与预期完全相反的情况。然后本文进行了Hausman 检验,用来判断使用随机效应模型还是固定效应模型。
从表3 结果可知,最大VIF 值小于3,未超过10,说明模型不存在明显的多重共线性问题。
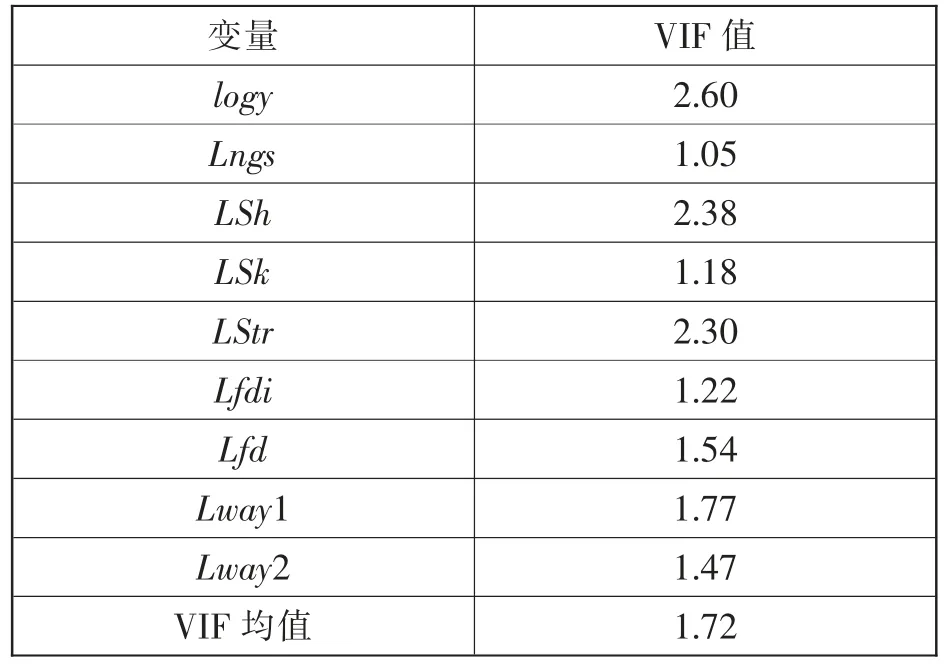
表3 模型VIF 检验结果
表4 是中国区域经济绝对收敛和条件收敛回归模型的Hausman 检验结果。绝对收敛回归模型是没有加入其他可能影响经济收敛的因素,即没有加入控制变量;条件收敛回归模型是加入了影响经济收敛的其他相关因素,即加入了控制变量。表4结果显示应使用固定效应模型,本文在接下来的分析中均采用固定效应模型进行回归。
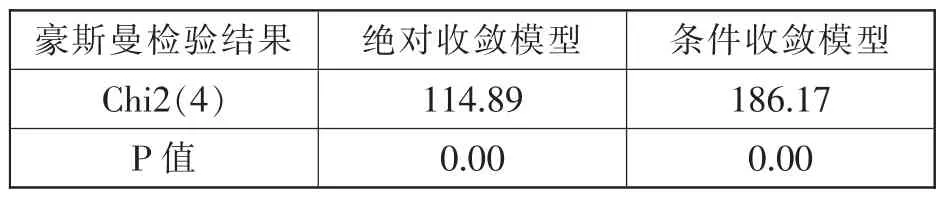
表4 模型选择Hausman 检验结果
(一)中国区域经济收敛情况
表5 报告了中国区域经济收敛性的检验结果。其中,模型(1)、(2)报告了中国区域经济增长绝对收敛的结果,模型(3)、(4)报告了中国区域经济增长条件收敛的结果,模型(2)、(4)采用的是个体-时间双向固定效应模型。从表5 的回归结果来看,无论是绝对收敛模型还是条件收敛模型,变量logy 的系数均在1%的显著性水平下显著,且方向为负。这说明2011—2018 年中国地级市层面上的确存在区域经济绝对收敛和条件收敛。
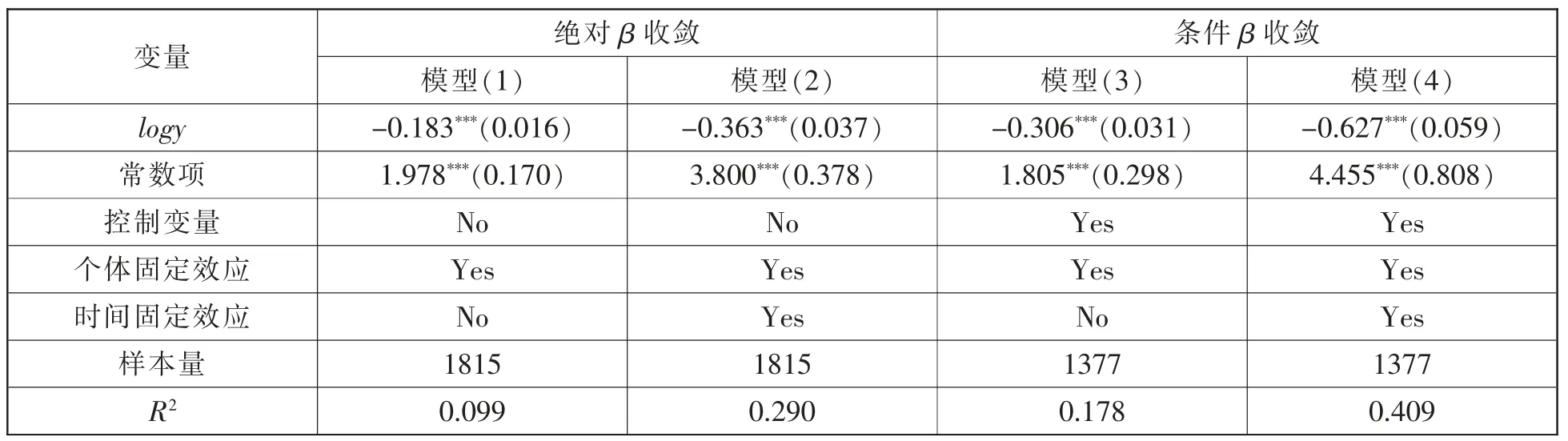
表5 中国区域经济收敛情况
(二)机器人应用对中国区域经济收敛速度的影响
本小节对机器人应用是否加速中国区域经济收敛进行实证检验。表6 报告了机器人应用对中国区域经济收敛速度影响的检验结果。其中,模型(1)、(2)报告了绝对经济收敛模型下的结果,模型(3)、(4)报告了条件经济收敛模型下的结果,模型(2)、(4)采用的是个体-时间双向固定效应模型。从表6 的回归结果来看,在绝对收敛模型和条件收敛模型下,工业机器人渗透率CHF 与变量logy的交互项系数均在1%的显著性水平下显著,且方向为负。在模型(2)中,工业机器人渗透率CHF 与变量logy 的交互项系数为-0.496;在模型(4)中,工业机器人渗透率CHF 与变量logy 的交互项系数为-0.751。加入工业机器人渗透率CHF 与变量logy 的交互项后,变量logy 的系数仍旧在1%的显著性水平下显著,且方向为负。这说明机器人应用显著加速了中国区域经济收敛,也即对于经济发展水平较低的区域而言,机器人应用水平的提高能够更快提升该区域经济增长率。检验结果支持本文的假设,表明机器人应用有助于促进共同富裕。
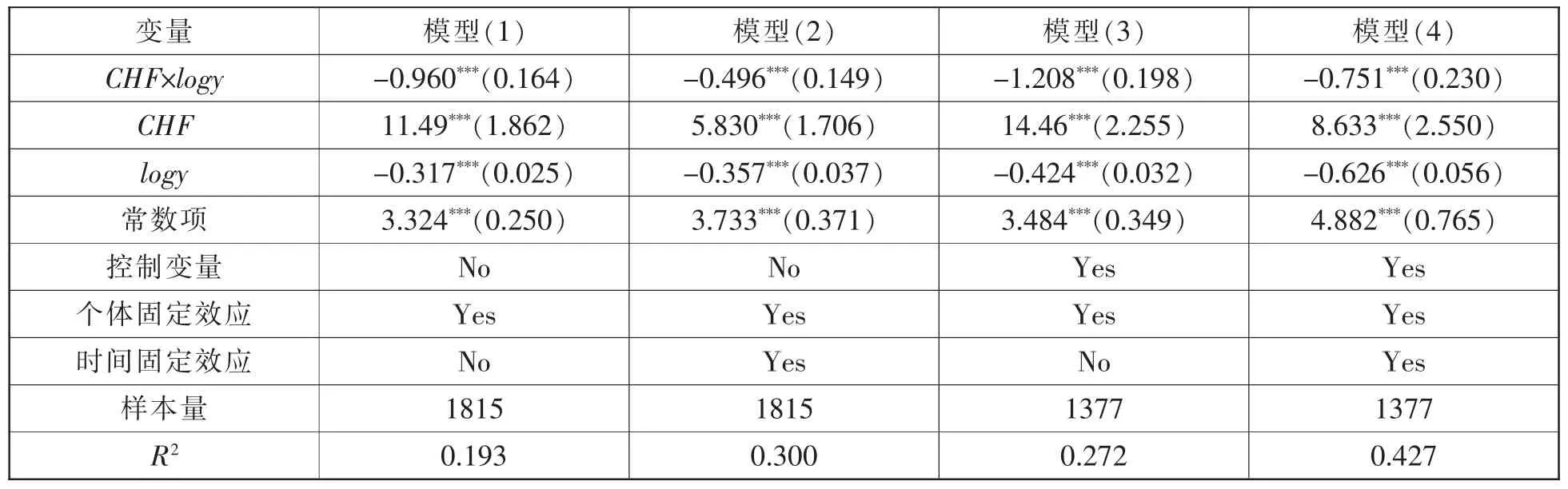
表6 机器人应用对中国区域经济收敛速度的影响
(三)异质性分析
中国区域经济发展不平衡的一个典型特征就是东中西部地区发展不平衡,东部沿海地区与中西部地区在经济发展、贸易参与度、劳动力技能结构等方面都存在着巨大差异,它们在机器人的应用程度上也有显著差别,将东中西部分组进行异质性分析,有利于进一步了解机器人促进经济收敛的作用。为此,本文将中国地级市分为东部地区、中部地区和西部地区三组并分别回归。如表7 所示,模型(1)和(2)是东部地区样本回归的结果、模型(3)和(4)是中部地区样本回归的结果、模型(5)和(6)是西部地区样本回归的结果。其中模型(1)、(3)、(5)未加入控制变量,为绝对收敛模型;模型(2)、(4)、(6)加入了控制变量,为条件收敛模型。
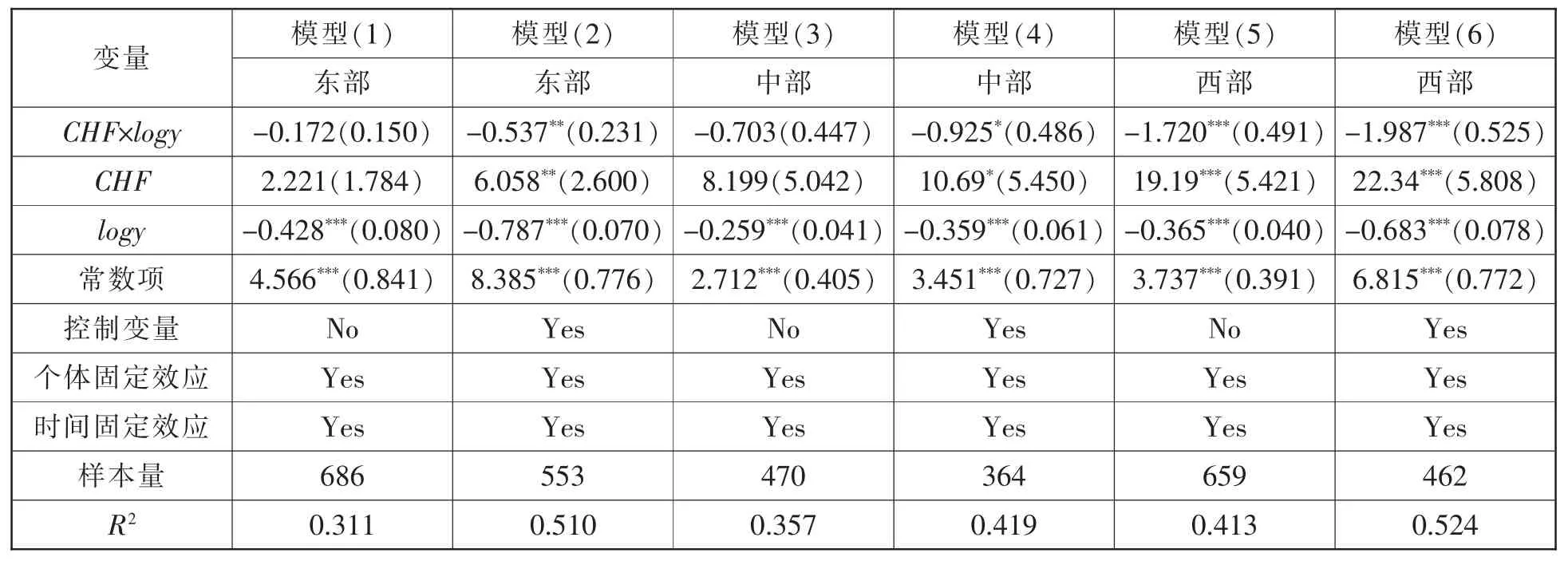
表7 异质性分析-东中西部差异
三组回归结果显示,模型(1)和(3)中工业机器人渗透率CHF 与变量logy 的交互项系数不显著,模型(2)中交互项系数为-0.537,在5%显著性水平上显著;模型(4)中交互项系数为-0.925,在10%显著性水平上显著;模型(5)和(6)中交互项系数分别为-1.720、-1.987,在1%显著性水平上显著。结果表明,机器人应用对促进中西部经济相对落后地区经济收敛的加速效应更为明显。东部沿海地区经济发展程度差异相对较小,机器人应用对其经济收敛的促进作用不如中西部地区大。这表明机器人应用对于促进中西部地区经济加速均衡发展、实现共同富裕有着巨大潜力。
五、稳健性检验
机器人的应用和经济增长收敛之间可能会存在反向因果关系等内生性问题。比如,可能会出现经济增长速度比较快的城市,为了进一步提高生产率而增加更多机器人的应用。因此,为了减少内生性因素的影响,确保结果稳健可靠,本文进行了以下稳健性检验。
(一)工具变量法
本文首先通过工具变量的方法来缓解内生性问题。参考王永钦和董雯(2020)和Acemoglu et al.(2020)的做法,利用美国行业层面的工业机器人数据来构造机器人渗透度的工具变量MCHFct,具体见第三节中的式(25)。该变量符合工具变量的条件:首先,美国行业层面的工业机器人应用程度对中国技能溢价以及其他本国因素没有影响,符合外生性条件;其次,美国机器人应用发展与中国呈现很高的趋同性,能够反映出中国同行业技术特征,符合相关性条件。为了更进一步解决内生性问题,本文参考Lewbel(2012)的做法,使用基于异方差的识别方法来提高工具变量估计量的效率。
表8 报告了机器人应用对中国区域经济增长收敛性影响的内生性检验结果。其中,模型(1)、(2)报告了绝对经济收敛模型下内生性检验的结果,模型(3)、(4)报告了条件经济收敛模型下内生性检验的结果,模型(5)报告了运用基于异方差的识别方法的内生性检验的结果,其中模型(2)、(4)是个体-时间双向固定效应模型。
表8 的回归结果在符号和显著性程度上与表6 的结果没有太大差异,说明在内生性缓解后,机器人应用仍显著加速了中国区域经济收敛,表明上文的回归结果稳健可靠。
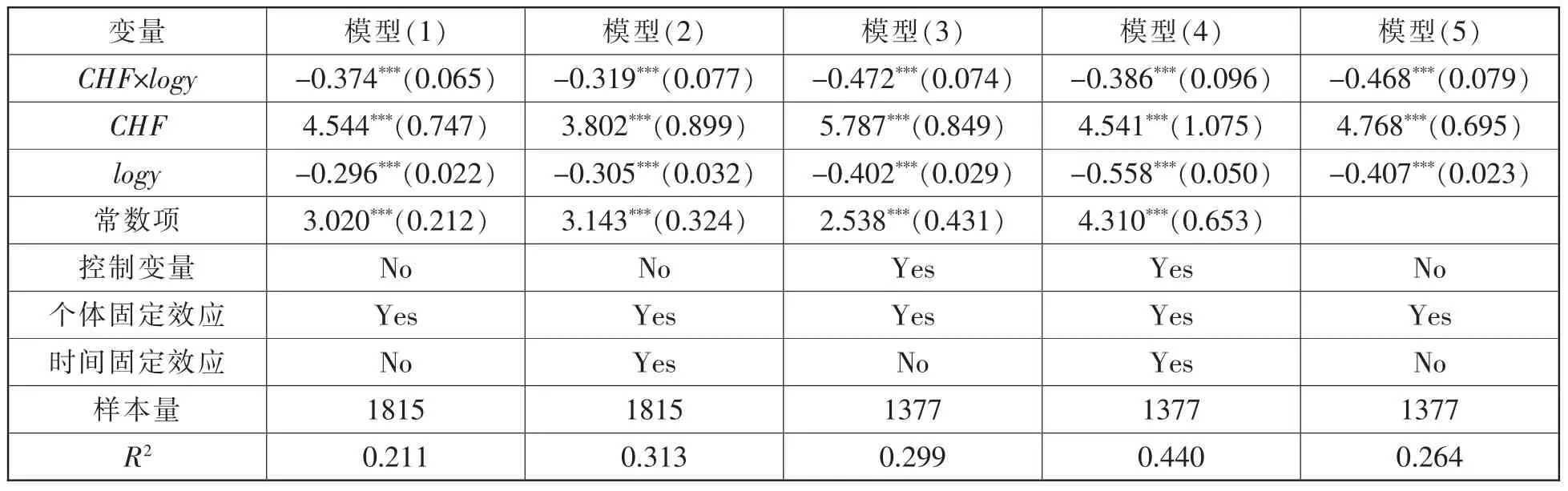
表8 稳健性检验(工具变量法)
(二)调整解释变量
为了进一步验证结果的稳健性,本文对解释变量做出2 种调整,其中一个调整是将行业扩大到包括农林牧渔、教育、建筑业等机器人使用较少的行业,变量解释详见第三节中的式(26)和式(27)。另一个调整是将数据范围扩大到全国范围,弥补8个省份缺失的不足。
表9 报告了解释变量调整为全行业后的检验结果。其中,模型(1)、(3)报告了绝对经济收敛模型下,机器人应用对中国区域经济增长收敛性的影响结果,模型(2)、(4)报告了条件经济收敛模型下,机器人应用对中国区域经济增长收敛性的影响结果。其中模型(3)、(4)使用相应的工具变量以减少内生性影响。从表9 的回归结果来看,工业机器人渗透率与变量logy 的交互项系数在绝对收敛模型和条件收敛模型中在1%的显著性水平下显著为负,变量logy 的系数仍旧在1%的显著性水平下显著为负,使用工具变量后,同样在1%的显著性水平下显著为负。这说明上文的回归结果稳健可靠。
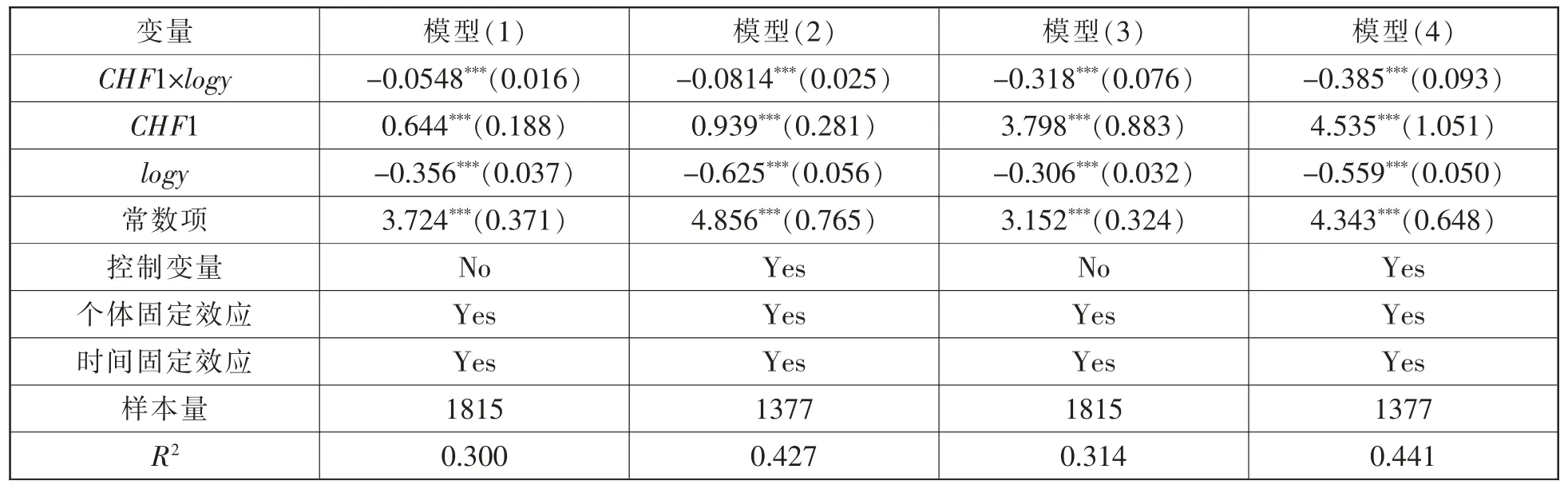
表9 稳健性检验(全行业)
表10 为解释变量调整为全地区后的结果。从回归结果来看,无论是绝对收敛模型还是条件收敛模型,工业机器人渗透率与变量logy 的交互项系数在1%的显著性水平下均显著为负,变量logy的系数在1%的显著性水平下显著为负,使用工具变量后的结果也在1%的显著性水平下显著为负。这说明上文的回归结果稳健可靠。
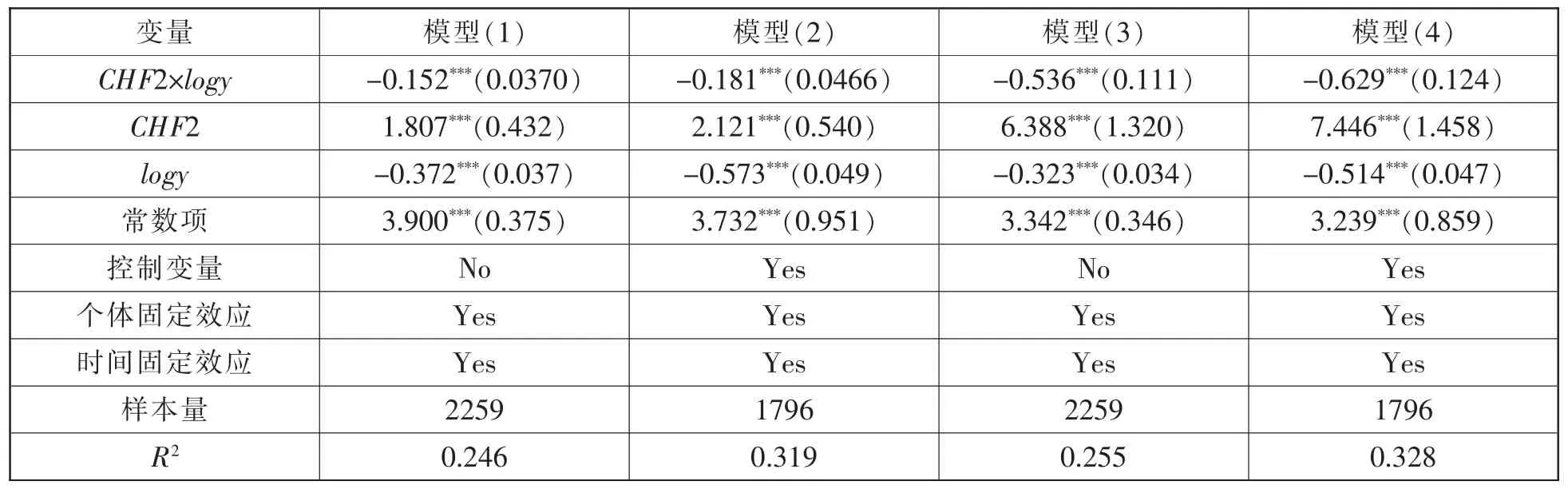
表10 稳健性检验(全地区)
六、结论和建议
机器人在各行各业的快速渗透势必会对中国区域经济发展产生重大而深刻的影响。本文把机器人视为一种生产要素,在新古典经济增长模型中研究了机器人应用对经济收敛的影响,并使用2011—2018 年中国228 个地级市数据对模型的理论预测进行实证检验。主要研究结果为:一是全国区域(地级市)经济存在收敛情况;二是机器人的运用可以促进区域经济加速收敛;三是机器人的运用对中国中西部地区经济收敛的促进作用更为显著。
基于上述研究,本文对加强工业机器人的运用、进一步促进区域协调发展、更好助力共同富裕,提出如下政策建议。首先,加大对工业机器人产业的财税政策扶持力度。虽然目前我国机器人保有量排名第一,但人均拥有量同发达国家相比依然较低,⑪为加速工业机器人的推广运用、推进生产“智能化”,建议对企业购置工业机器人给予财政补助、对工业机器人采用加速折旧或对工业机器人折旧采用加计扣除税收优惠,以激励企业更新改造工业机器人。其次,着力推动中西部地区工业机器人的应用。通过工业机器人的应用引进资金、人才和技术,促进地区经济社会发展,实现东中西部的共同富裕。最后,重视机器换人后相关制度改革,让发展的成果惠及全体人民群众。当前,工业机器人等人工智能技术的运用也会引起“机器代人”的广泛忧虑,人工智能是资本和技术密集型产业,是人类与机器间的竞合,也是资本与劳动间的竞合。因此在大力发展人工智能的同时,要加大初次分配向劳动倾斜力度,并注重劳动者技能的培训以适应人工智能发展,保障劳动者更加充分、更高质量的就业。
注释:
①根据国际机器人联合会(IFR)定义,工业机器人是在工业自动化中使用的、可重复编程的、多用途自动控制操作机,是面向工业领域的多关节机械手或多自由度机器人,可在一些单调、繁复和长时间的工作中替代人类(程虹等,2018;Graetz et al.,2017)。
②数据来自于国际机器人联合会(IFR)。
③蔡昉和都阳(2000)认为经济开放程度会影响市场化程度,从而影响资源的配置效率,越开放的经济体,市场机制所发挥的作用也越明显,资源配置的效率也就越高,越有利于经济增长速度的提高,促进落后地区对发达地区的追赶。
④本文把机器人视为一种新的生产要素主要出于以下理由:机器人可在许多的工作中替代人类劳动,甚至在许多任务上能超越人类,在这一意义上,机器人从事的工作具有人类劳动的属性。但机器人是机器,它也具有资本的属性。鉴于机器人拥有资本和劳动两方面的属性,但又存在有别于这两方面的属性,故本文把其视为一种新的生产要素。
⑤企业需要投入才能购买到机器人要素,所以本文用企业在机器人应用方面的资本投入来衡量机器要素投入。
⑥详细推导请参见Barro &Sala-i-Martin(1995)。
⑦IFR 提供的全球分行业工业机器人数据涉及到14个制造业小类,中国以31 个制造业二位行业代码归类,2011 年前汽车制造业未从运输设备制造业中独立出来,所以制造业行业小类最后归并为13 个,匹配方法参照闫雪凌等(2020)的方法(感兴趣者可向作者索取)。
⑧中国工业机器人2010 年后才真正迈入发展轨道,以之前的数据为基期不能反映现实,故本文以2010 年作为计算基期。
⑨8 个缺失省份具体为江苏省、青海省、湖北省、湖南省、海南省、河南省、吉林省、新疆维吾尔自治区。
⑩由于涉及到数据滞后,本文数据的描述性统计包括2010—2018 年。
⑪2018 年,中国机器人密度为140 台/万工人,而新加坡为831 台/万工人、韩国为774 台/万工人、德国为338 台/万工人、日本为327 台/万工人,世界平均水平为99 台/万工人。数据来自《2020 年中国工业机器人产业发展报告》。
猜你喜欢
小学生学习指导(高年级)(2021年4期)2021-04-29 02:17:10
河北理科教学研究(2020年2期)2020-09-11 06:15:48
黄河之声(2018年5期)2018-05-17 11:30:01
数学年刊A辑(中文版)(2015年2期)2015-10-30 01:56:14
Coco薇(2015年10期)2015-10-19 12:51:50
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
新高考·高二数学(2014年7期)2014-09-18 00:42:02
