三维激光扫描在超高层倾斜监测中的应用
2023-01-15 08:31李树文郭庆坤隋俭武
北京测绘 2022年11期
刘 斌 李树文 杨 慧 孔 刚 郭庆坤 朱 君 隋俭武
(济南市勘察测绘研究院, 山东 济南 250001)
0 引言
随着现代化施工工艺的提高,城市发展的加快,越来越多的超高层建筑作为区域地标而建立,而超高层倾斜监测一直是测量的重难点[1-3]。传统的测量方法利用全站仪、激光测斜仪、数字正垂仪等进行超高层监测,数据采集费时费力,数据处理结果不够形象直观,难以获取建筑表面细节特征[4-6]。
三维激光扫描技术随着科技的发展,利用激光快速扫描,无须接触,便得到海量点云数据,速度快、精度高,操作简便,形象展现物体的三维信息,直观表现立体模型,广泛应用于城市建筑物测绘[7]、建筑物模型建立[8-9]、建筑物立面改造[10-12]、基坑改造测绘[13]等领域,为复杂测量问题提供了全新的解决方案,三维激光扫描技术在超高层倾斜监测领域,以建筑变形特征提取、模型建立与应用、变化趋势拟合等为主[14-15],为分析超高层倾斜变化提供帮助。
本文以济南平安金融中心超高层建筑为例,对其进行三维激光扫描,通过点云配准、模型拟合等过程,提取相应高度角点坐标进行倾斜率计算,通过与实测数据比较分析,验证了此方法的可行性。
1 外业观测
济南平安金融中心位于济南中央商务核心区,项目由塔楼和商业裙房组成,其中,塔楼分为地上62层,地下3层(局部4层)。塔楼建筑总高度360 m。
建筑施工过程中及竣工验收前,需对建筑上部结构进行倾斜观测,一般采用投点法选取塔楼外立面指定高度的四角进行倾斜监测。此方法获取的数据量少,逐点采集费时费力。鉴于此,选取天宝TX8三维激光扫描仪进行超高层建筑扫描。天宝TX8三维激光扫描仪以360°×317°的视场和每秒1 000 000点的数据获取速度,可以快速高效地完成测量任务,在其Extend模式下,测程可扩展至340 m。可有效对超高层核心筒进行扫描,其主要性能参数如表1所示。

表1 天宝TX8三维激光扫描仪性能指标
利用济南平安金融中心外围已知控制点(平面、高程分别采用二级导线、二等水准进行测设),沿建筑东西两侧道路进行连续设站,测站间摆放标靶球用于后续配准,测量线路及外业数据采集情况如图1所示。
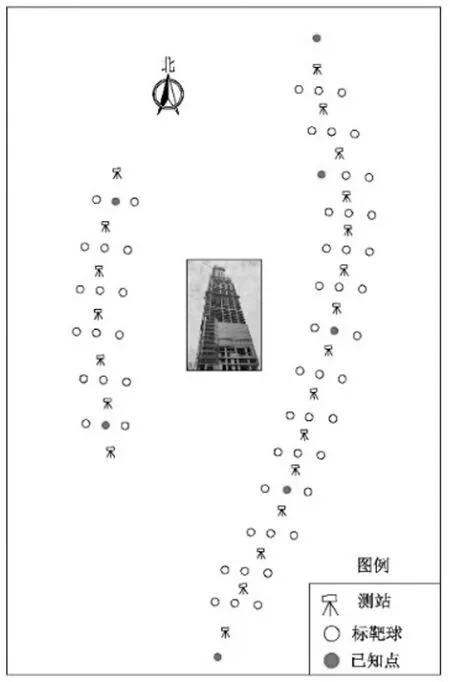
图1 三维激光扫描线路示意图
考虑到测量效率与时间情况,本次采用Level1模式扫描全景,Extend模式局部扫描的方法。本次扫描共设站22站,测站间隔约30 m, 测站任意架站,测站间摆放标靶球用于配准,已知点上架设标靶球用于坐标转换。
2 数据处理
2.1 点云配准
点云配准是将观测数据拼接到同一个基准下,形成一个整体数据的过程。选取天宝点云数据处理软件Trimble RealWorks进行数据处理。在点云配准过程中主要包括点云数据导入、靶球提取、网平差等步骤。
2.1.1靶球提取
点云数据导入后,利用测站间的标靶球将不同测站间点云进行配准,标靶球识别提取时利用目标分析器提取目标靶球。本项目共测量22站,提取标靶球120个,标靶球的拟合精度如表2所示。
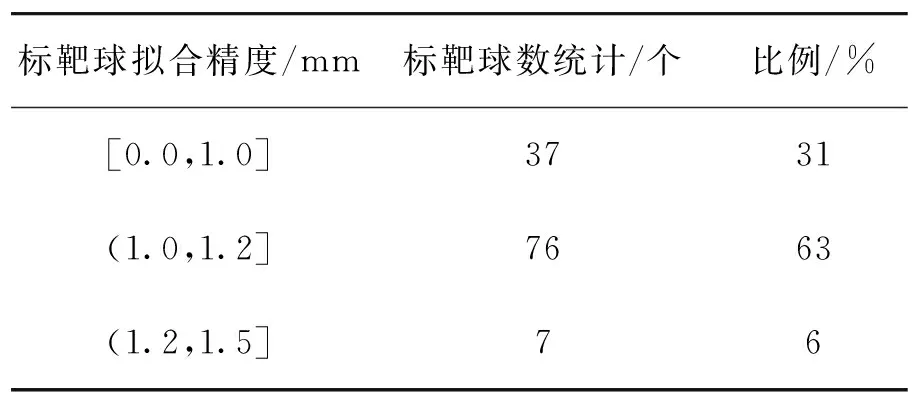
表2 标靶球拟合精度统计分析表
从表2可知,标靶球拟合精度均未超过1.5 mm,其中,拟合精度在1.0~1.2mm之间的占63%,占比最大,拟合精度小于1mm的占31%,比例次之,拟合精度在1.2~1.5mm之间的占6%,占比最小;标靶球拟合精度最大值为1.5 mm,最小值为0.8 mm,平均值为1.0 mm。综上所述,软件进行标靶球提取时的拟合精度较高。
2.1.2网平差
标靶球提取完成后,导入已知点数据。利用基于名字的网平差,将点云数据进行配准融合,转换到已知点坐标系下,实现点云数据向地理坐标数据间的转换。网平差基于最小二乘原理,实现扫描数据与已知数据的最佳转换。本项目共选取6个已知控制点,均匀分布于扫描线路上,网平差后的不同测站间同名标靶球残差如图2所示。
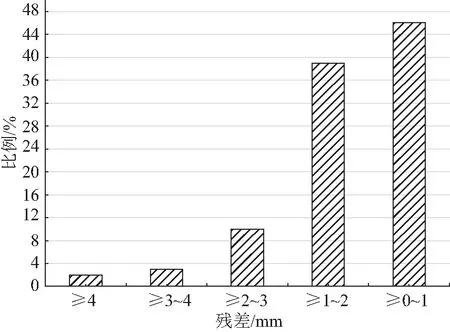
图2 不同测站间同名标靶球残差统计示意图
由图2可知,配准残差小于1 mm的标靶球占46%,1~2 mm的占39%,2~3 mm的占10%,3~4 mm的占3%,大于4 mm的占2%;标靶球平均残差为1.2 mm,最大残差为4.0 mm,最小残差为0.1 mm。综上所述,本次点云利用标靶球进行配准精度较好。
已知点残差统计如表3所示。

表3 已知点网平差残差统计表
由表3可知,已知点残差最大值为5.8 mm,最小值为0.9 mm,平均值为3.1 mm;有4个已知点均在2个测站间进行了扫描,不同测站之间残差差值较小,最大残差差值为1.6 mm,最小为0.7 mm,平均值为1.0 mm。综上所述,利用已知点进行点云配准精度好,满足三等点云配准后同名点内符合精度(≤25 mm)要求。
2.2 点云建模
点云配准完成后,为提取核心筒外立面指定高度处角点坐标,对点云数据进行分析建模,利用点云数据拟合模型,通过对拟合模型的数据分析,求得超高层建筑的倾斜变化。
2.2.1点云分割
超高层建筑随着施工进度的变化核心筒逐渐内收,本次点云数据扫描到指定高度处核心筒内收前后完整数据,扫描的核心筒位置缩略图如图3所示。
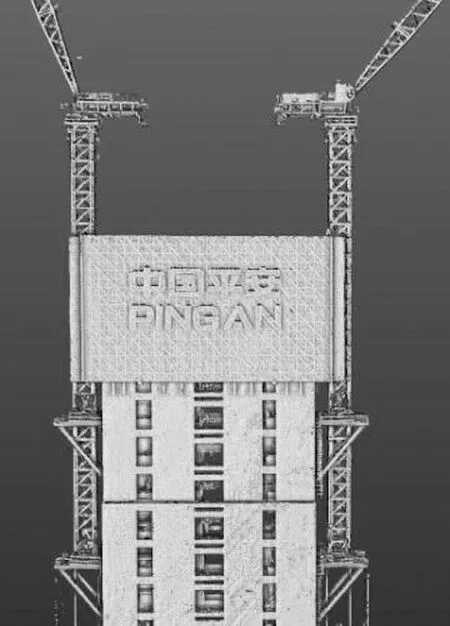
图3 核心筒位置点云示意图
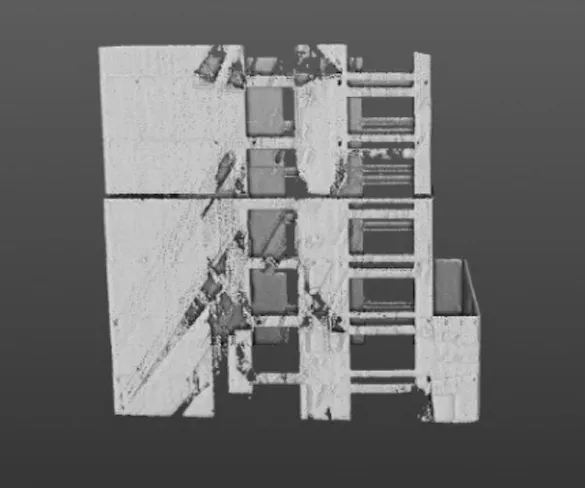
项目倾斜监测的主要对象是超高层建筑的核心筒位置,故首先对点云数据进行点云分割提取,利用点云分割提取工具,去除噪点,提取核心筒外立面规则点云数据,便于后续建模使用。点云分割提取如图4所示。


(a)分割去噪前

(b)分割去噪后图4 点云分割示意图
2.2.2点云建模
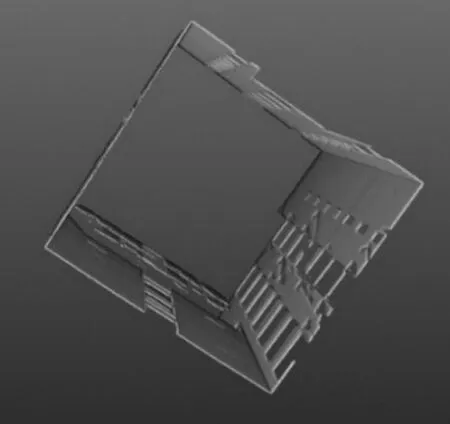
利用点云数据建模功能,根据分割提取的点云数据进行模型建立,拟合核心筒立体模型,核心筒模型建立如图5的示意图。
(a)提取点云数据

(b)拟合模型图5 核心筒位置处点云建模示意图
2.2.3数据提取
利用拟合模型构建三角网,利用平面分割工具,切割指定高度处三角网模型,生成指定高度处线框模型,利用坐标提取工具,提取线框角点坐标。数据提取过程如图6所示。
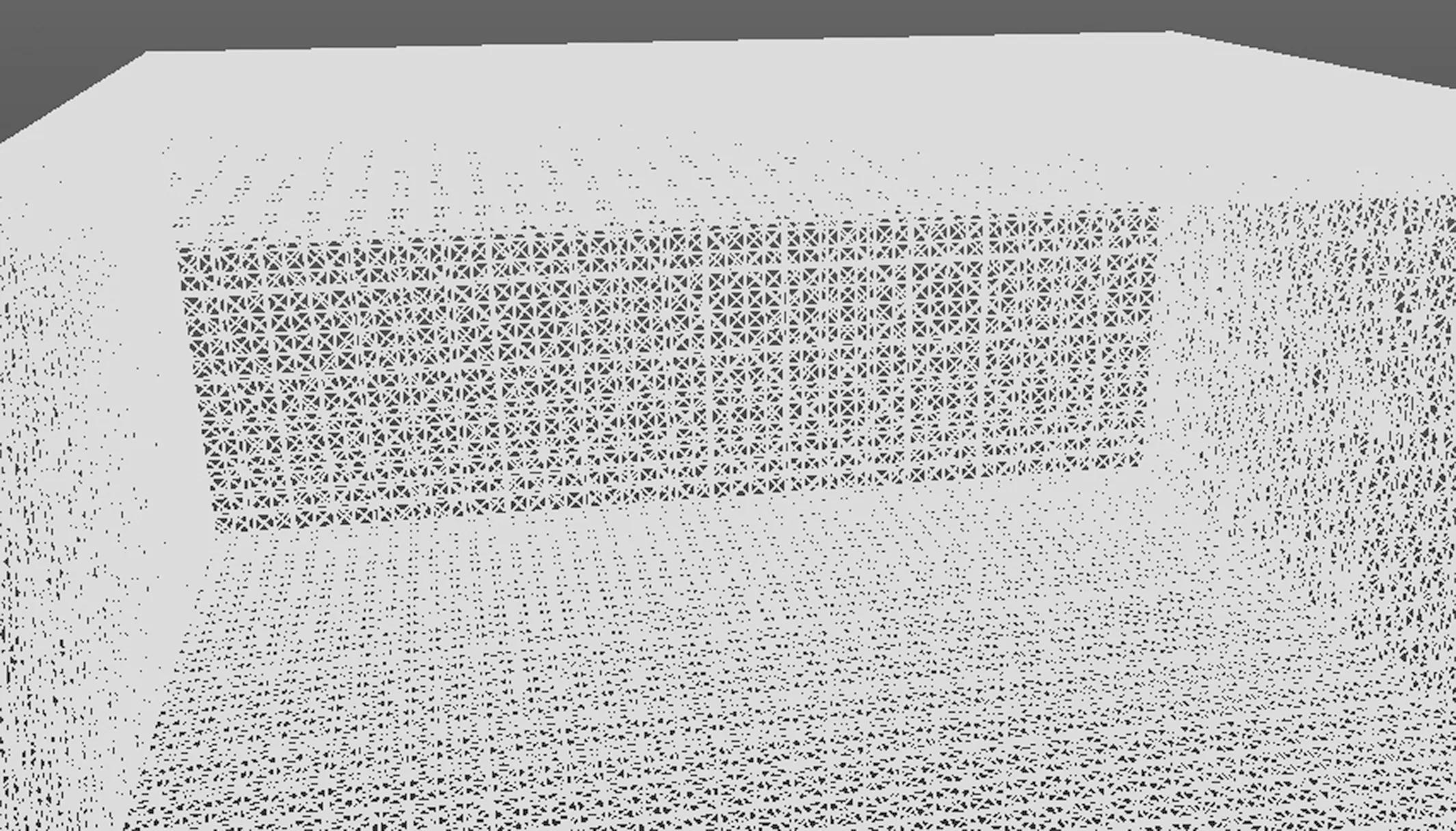
(a)构建三角网
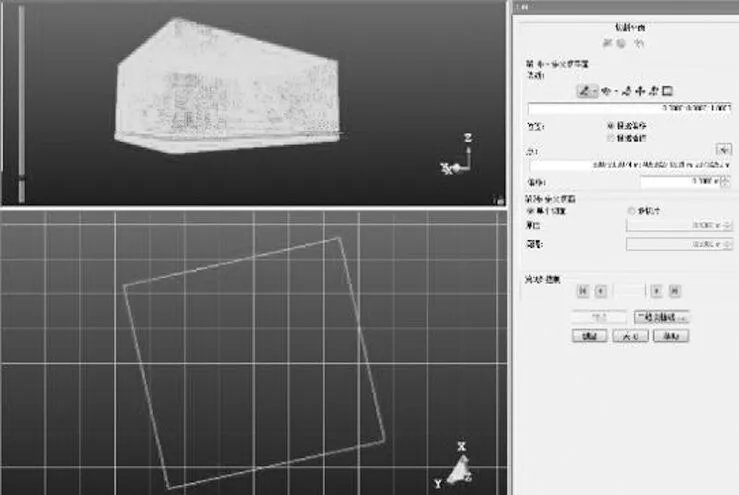
(b)平面切割模型图6 角点数据提取示意图
提取核心筒模型外立面角点坐标,对超高层建筑的倾斜变化进行数据计算分析,角点坐标内收修正后利用十字交叉法确定拟合中心点坐标,利用上部核心筒拟合中心点与一层中心点确定倾斜变化量。
3 精度分析
通过角点坐标提取,得到指定高度处核心筒外立面特征点坐标,并对其进行内收修正,根据修正坐标求得核心筒拟合中心点位置,拟合中心点采用轴角点十字交叉法确定坐标,提取角点坐标及拟合中心坐标与全站仪实测数据进行对比分析,差值情况如表4所示。
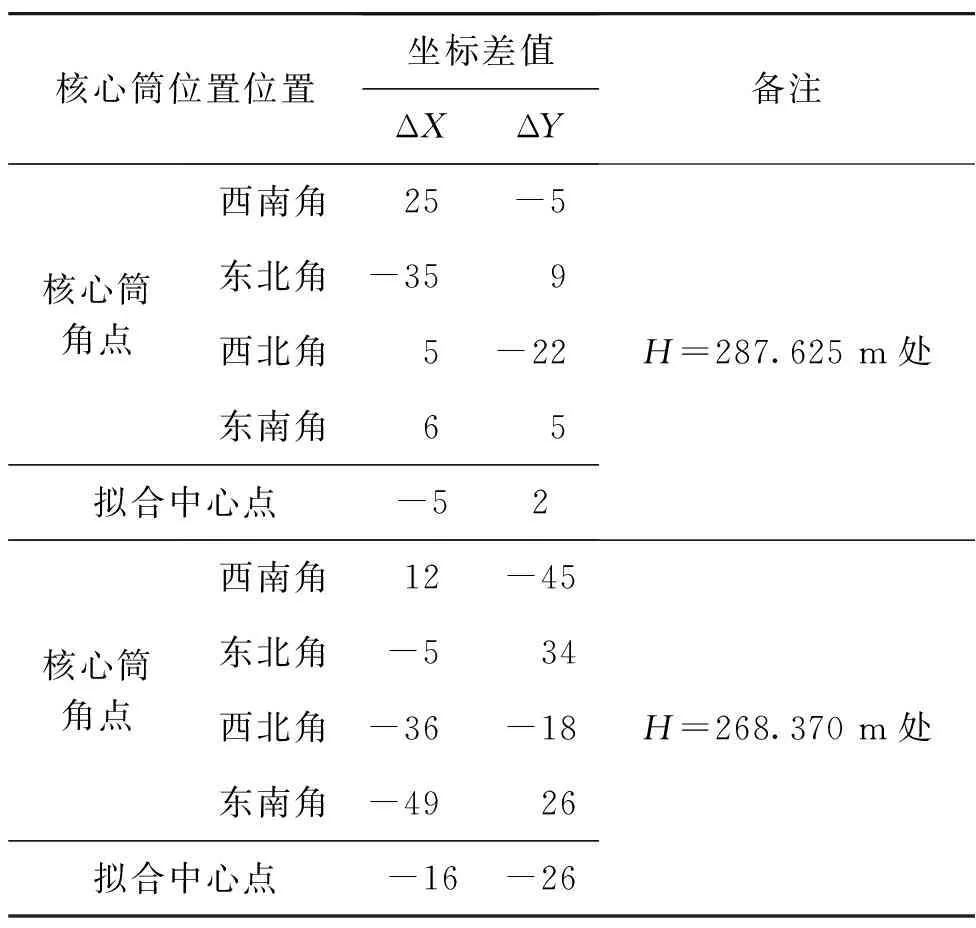
表4 模型提取坐标与实测坐标差值比较表 单位:mm
利用指定高度处中心点坐标与一层中心点坐标进行处理计算求得其倾斜变化率,倾斜变化率计算公式如下:
其中,x上、y上为上部核心筒中心点坐标;x1、y1为一层核心筒中心点坐标;h上为上部核心筒指定高程;h1为一层核心筒高程。
根据上式求得扫描仪数据的倾斜变化率、全站仪实测数据的倾斜变化率,两者结果比较如表5所示。
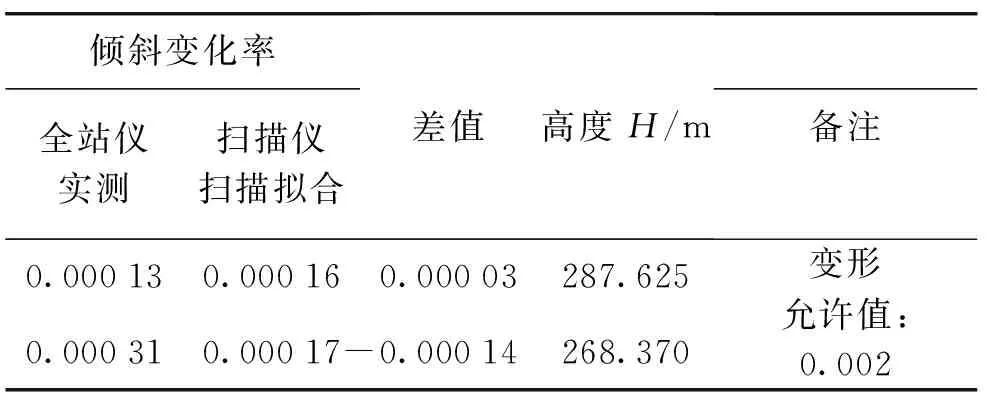
表5 超高层倾斜变化率比较表
由表5可知,根据扫描仪拟合坐标求得的倾斜值与全站仪实测数据求得的倾斜变化率差值较小,且均在变形允许控制值以内,满足超高层倾斜监测规范要求,证明了三维激光扫描仪在超高层倾斜监测应用中的可靠性。
4 结束语
三维激光扫描技术因其无接触性、扫描速度快、精度高等优势,越来越多地应用于精密测量领域。本文结合济南平安金融中心倾斜监测项目,利用三维激光扫描仪对其进行扫描,经过标靶球提取、点云配准、点云分割去噪、点云建模、坐标提取等步骤,拟合超高层建筑的核心筒模型,通过提取角点坐标求得核心筒中心位置及倾斜变化率,通过与全站仪实测数据的对比分析,验证了三维激光扫描仪在超高层倾斜监测中应用的可靠性,为超高层倾斜监测等类似项目提供了一种新的解决方案。
猜你喜欢
计算机应用与软件(2022年12期)2023-01-31
文萃报·周五版(2021年45期)2021-11-17
计算机仿真(2021年8期)2021-11-17
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
电脑报(2019年4期)2019-09-10
电子技术与软件工程(2018年10期)2018-07-16
测绘通报(2017年2期)2017-03-07
世界博览(2015年20期)2015-09-10
大众摄影(2015年9期)2015-09-06