永磁同步电机非线性调节器MTPA弱磁控制
2023-01-14 11:28李齐齐
机电信息 2023年1期
刘 毅 吴 翔 李齐齐
(1.河南工学院,河南 新乡 453003;2.中国矿业大学,江苏 徐州 221008)
0 引言
电机驱动技术作为新能源汽车的“心脏”,在新能源汽车创新链中占据重要地位,而永磁同步电机是电驱系统中的重要组成部分。20世纪80年代,美国学者B.Sneyers和T.M.Jahns等人提出了“弱磁升速”的思想,引领了永磁同步电机弱磁控制的研究热潮[1-2]。通过弱磁控制可提升调速范围,但牺牲了转矩输出能力,而且去磁电流的施加增加了电机的损耗。受功率器件的性能约束,为降低电机与逆变器动态损耗,高转速条件下逆变器常处于低载波比工况,使得阻抗耦合与数字控制延时的影响变大,电流控制失稳突出乃至失磁。
目前,根据弱磁控制算法中电流调节器的个数,将弱磁控制方法基本归纳为:双电流调节器弱磁控制方法、单电流调节器弱磁控制方法。双电流调节器弱磁控制方法,以负d轴电流补偿方法较为突出,该方法不依赖电磁参数,鲁棒性较好,但随着转速升高稳定性下降,无法深度弱磁。文献[3]采用转矩/磁链查表法,通过设计不同的反馈闭环逐步修正磁链,提高了系统的鲁棒性,同时有效处理了母线电压波动问题。S.Ekanayake等人提出了一种基于DTFC的自适应磁链观测器,在线估计气隙磁通量,使得电机在最小损耗下运行,提高了电机的运行效率[4]。L.Sepulchre等人在考虑电池功率限制的条件下,采用了最大转矩电压比(Maximum Torque Per Voltage)控制算法进行深度弱磁,从零速至最大转速无须切换算法,电机能够运行平稳[5]。
为解决弱磁控制中d、q轴电流耦合而导致电机控制效果变差的问题,单d轴电流调节器弱磁控制算法应运而生,为弱磁控制提供了新的控制思想,但其存在转矩控制能力弱、动态响应性能差、电机效率低等不足。为提高该方法的电机工作效率,李雪等学者引入虚拟阻抗,提出了一种新的给定交轴电压的方法,依照稳态工作点预先设定电流轨迹,再根据单电流调节器的控制思想得到交轴电压的表达式[6]。有别于单d轴电流调节器控制方法,基于电压角控制的原理,文献[7]提出了一种单q轴电流调节器变电压角控制方法,为永磁同步电动机在大转速范围内的运行提供了新的途径,该方法能在电流参考值变化时实现电流的快速动态响应。
本文在电压反馈弱磁控制的基础上,提出一种抗饱和非线性调节器的弱磁控制方法,并得到了仿真和实验验证。
1 永磁同步电机数学模型
永磁同步电机(PMSM)具有变量多、非线性、高度耦合等特点,为简化分析,作以下假设:
(1)不考虑PMSM中的铁芯饱和;
(2)不考虑磁滞损耗和涡流损耗;
(3)励磁磁场、电流磁场正弦分布;
(4)不考虑电机中的高次谐波。
基于上述假设,利用坐标变换思想,可得到两相旋转dq坐标系下PMSM的数学方程如下:
(1)电压方程:
(2)磁链方程:

(3)约束关系:

(4)转矩方程:

式中:ud、uq为定子电压矢量us在d、q轴的定子电压分量;id、iq为定子电流矢量is在d、q轴的定子电流分量;Ld、Lq为电感分量;Rs为定子电阻;ψf为永磁体磁链;ψd、ψq为磁链矢量ψs在d、q轴的定子磁链分量;ωe为转子电角速度;pn为电机极对数;Te为电磁转矩。
2 非线性变参数MTPA弱磁控制
2.1 MTPA控制
根据前文所述电机数学模型可以知道,电机运行中期电压矢量和电流矢量存在约束条件,且电磁转矩由永磁转矩和磁阻转矩两部分组成。
约束条件的上限很大程度上取决于逆变器的物理特性,即:

与此同时,逆变器能输出的电压极限值usmax和逆变器直流侧电压udc满足定量关系,对于二电平逆变器而言,有:

立足矢量控制思想,通过调节直、交轴电流可实现对电机转矩、转速的控制,结合前述PMSM数学方程,可以得到约束直、交轴电流的电压极限圆与电流极限圆方程:
由式(7)(8)可得PMSM电压、电流极限圆,如图1所示。
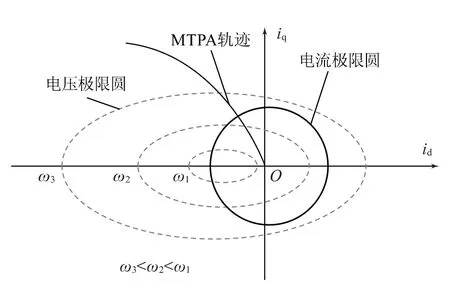
图1 PMSM电压、电流极限圆
为了将磁阻转矩利用起来,提高内置式永磁同步电机的转矩输出特性,在保证输出电磁转矩的条件下使得定子电流矢量幅值最小,采用永磁同步电机最大转矩电流比(MTPA)控制算法,将满足定子电流矢量幅值最小条件的点连接起来,其对应的曲线称为MTPA轨迹。永磁同步电机在MTPA轨迹上以恒转矩方式运行时,定子电流幅值最小,这有利于减小电机运行中的铜耗,提高逆变器的效率,降低能量损耗。
此时,MTPA控制策略变成了解决Te/is的极值问题。根据拉格朗日定理,引入拉格朗日算子ζ,构建辅助函数:

运用拉格朗日求极值的方法分别对直、交轴电流求偏导,可得满足MTPA控制的定子电流d、q轴分量:
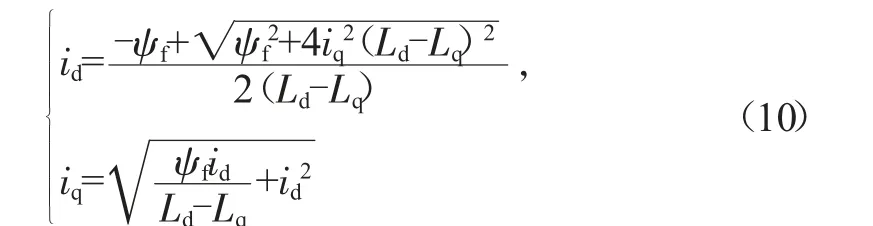

此时,电机的电磁转矩为:当给定电机转矩后,通过以上公式即可求出对应的iq,进一步即可求出id和is的值。
2.2 非线性调节器设计
一般PMSM控制需要满足消耗小电流输出大转矩及电机在全转速范围内运行的要求,故需将MTPA控制和弱磁控制结合。
为了提高系统的动态性能,抑制传统PI控制中存在的积分饱和现象,本文基于条件积分法设计了一种抗积分饱和的速度调节器,将其引入永磁同步电机MTPA弱磁控制系统,可有效解决电机速度超调量大、响应慢、抗干扰能力差等问题。
设计的抗积分饱和速度调节器表达式为:
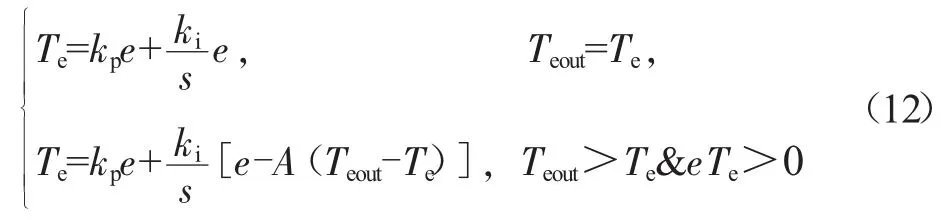
式中:e为速度偏差;A为反馈系数,A>0;Teout为Te经限幅后输出的转矩值。
进一步,结合式(10)和式(11),可实现通过调整id和iq来改变电机转矩。
随着转速的升高,电机相电流和相电压均达到最大值,其对应的d轴和q轴控制电流即为转矩方程在满足电流极限圆和电压极限圆两个条件下的极值点。
基速状态下,当定子电流、电压升到最高时,得到基速:

基速以上处于弱磁阶段,采用电压反馈弱磁控制方法来实现弱磁控制。定子电压与给定电压相减,根据差值算出与之对应的定子电流,保持电机继续运行在弱磁区间。定子电流指向的方向与电流极限圆指向的方向重合,此时电流满足id2+iq2=i2smax。
与传统的电压反馈弱磁不同,本文构建了非线性变参数调节器来替换原有的电压反馈环的PI调节器,具有PI调节器快速收敛性能,同时改善了动态超调问题,提高了系统稳定性。
构建的非线性变参数调节器表达式如下:
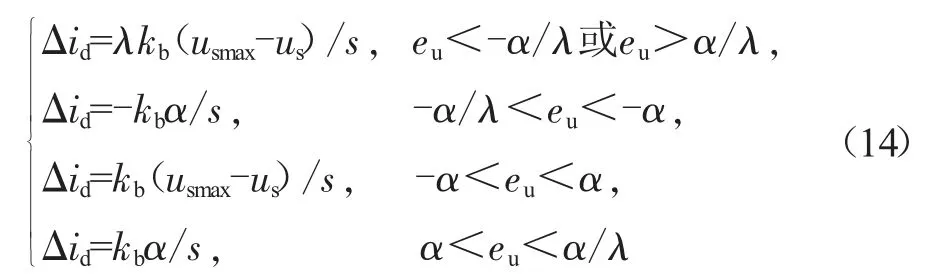
如式(14)所示,为确保弱磁过程中系统的稳定性,当us接近usmax时,应根据eu=usmax-us偏差大小,适时调整调节器的收敛速度。定义α为收敛系数,一般取偏差e=(0.05~0.1)usmax=αusmax作为收敛速度调整的切换点。
在(-α,α)区间内,设置调节器基本调节参数为kb。在此区间外,应在系统稳定性与收敛速度间作出平衡,选择适当的调节器参数。为此,引入调节系数λ,一般可取λ=(2~10)α。基于此,可进行非线性调节器转折点界定:

可得:

对应的非线性变参数调节器特性曲线如图2所示。
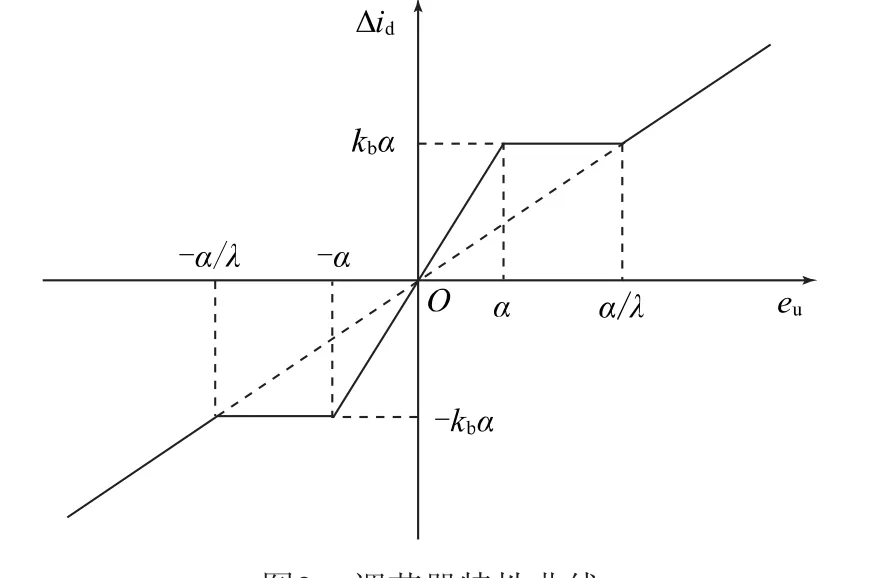
图2 调节器特性曲线
相比一般的线性PI(Kp、Ki)积分器,本文构建的非线性变参数调节器,需调整的参数为kb、α、λ,而α、λ为相关联参数,并没有增加结构的复杂性,但解决了积分参数不合适引起的稳态震荡、收敛速度慢等矛盾问题。
基于非线性调节器的PMSM弱磁控制基本框图如图3所示。
3 MTPA弱磁控制仿真与实验
为了验证图3所示算法的可行性,采用MATLAB/Simulink软件搭建控制系统仿真,PMSM极对数为4,定子电流120 A,Ld=1 mH,Lq=2 mH,Ψf=0.24 Wb,α=0.05,λ=0.25。
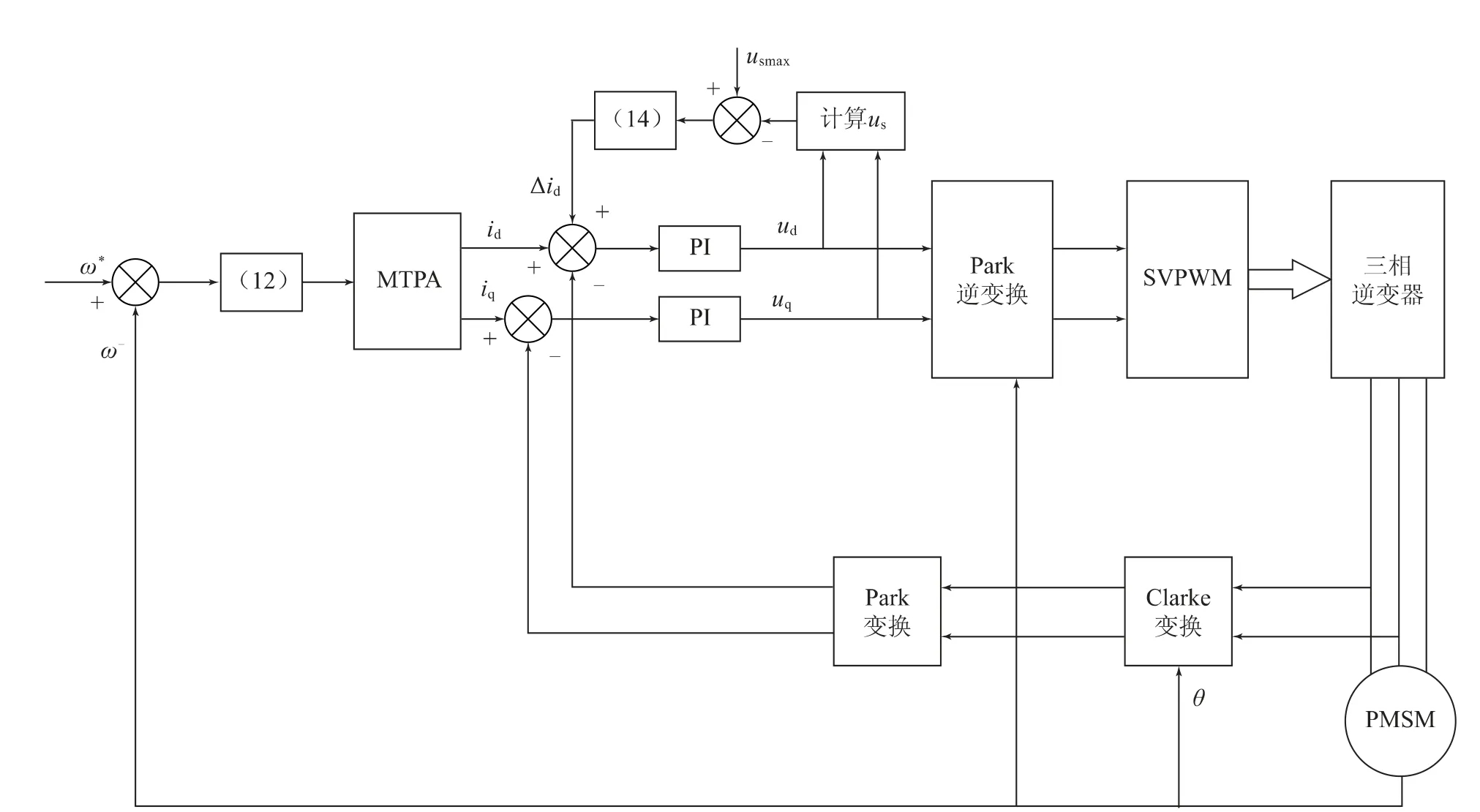
图3 系统控制框图
电机初始转速给定600 r/min,在t=0.5 s时,突加转速至2 000 r/min;在t=1 s时,在转速给定2 000 r/min时,突加负载,电机的负载转矩由5 N·m突加至25 N·m,仿真波形如图4、图5、图6所示。
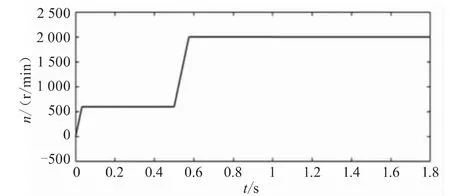
图4 转速波形图
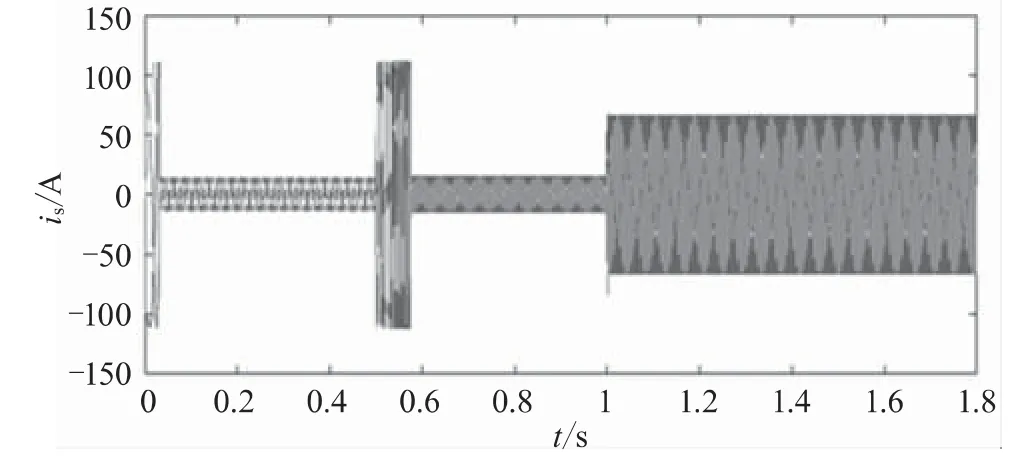
图5 电机三相电流波形图
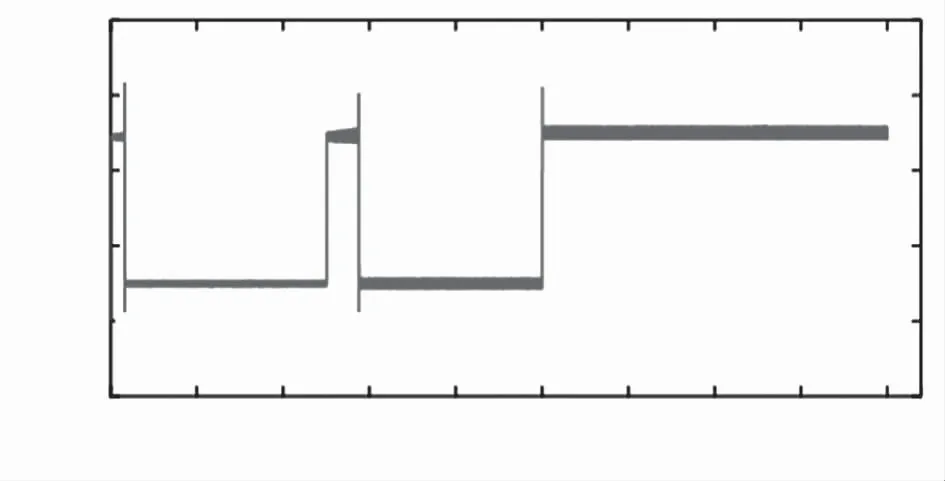
图6 转矩波形图
由定子电流波形及转矩波形可知,永磁同步电机在低速轻载启动的情况下,转速能够从低速迅速升高到弱磁区转速;且突加负载时仍能良好跟随,电机响应迅速,说明了控制策略的动态性能良好。
进一步在实验平台上进行了实际验证,弱磁升速至稳态转速2 000 r/min,实验波形如图7所示。
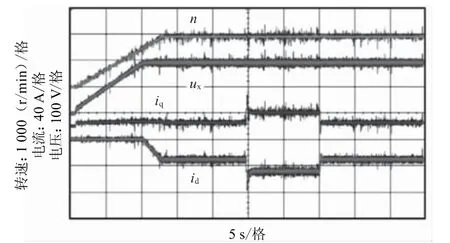
图7 弱磁升速控制波形图
4 结语
本文以永磁同步电机为研究对象,首先根据电机本体结构对永磁同步电机进行数学建模,介绍了基于极限圆、MTPA原理的永磁同步电机弱磁控制理论;然后分别构建了基于条件积分法的抗积分饱和的速度调节器、非线性变参数电压反馈调节器,并将其引入永磁同步电机MTPA弱磁控制系统,可有效解决电机速度超调量大、响应慢,抗干扰能力差等问题,提高了系统稳定性。仿真与实验结果表明,该方法能够快速实现良好的MTPA弱磁控制。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
防爆电机(2022年4期)2022-08-17
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
宇航计测技术(2018年3期)2018-09-08
汽车与新动力(2015年1期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车与新动力(2014年6期)2014-02-27