
基于LoRa技术的联合收获机群通信方法
2023-01-12 13:19傅晟捷关卓怀朱富豪朱林军邢立成
农业工程学报 2022年16期
陈 进,傅晟捷,关卓怀,朱富豪,朱林军,夏 慧,邢立成
基于LoRa技术的联合收获机群通信方法
陈 进1,傅晟捷1,关卓怀2,朱富豪1,朱林军3,夏 慧3,邢立成3
(1. 江苏大学机械工程学院,镇江 212013;2. 农业农村部南京农业机械化研究所南京 210014;3.江苏沃得农业机械股份有限公司,丹阳 212300)
随着农业集约化、规模化及产业化的发展,联合收获机开始以机群形式进行多机联合作业,由此衍生出对于联合收获机群物联网及无线通信的需求。在无线通信技术中,LoRa技术在传输距离、部署方式等方面具有独特的优势。该研究提出了一种基于2.4 GHz LoRa技术的联合收获机群通信网络结构和工作模式。对LoRa相关参数使用NS-3网络仿真平台建立仿真模型,对扩频因子分配方案选择、可容纳节点数量和最小发送间隔进行分析,并在联合收获机群模拟通信场景进行仿真,同时开发了机载终端硬件和软件。仿真试验结果表明,在模拟通信场景下,选择特定比例分配扩频因子可改善网络通信性能;在保证90%以上接收成功率的前提下,静态场景下1 625 kHz带宽可支持25个节点以1 s的发送间隔进行通信,在动态场景下1 625 kHz带宽通信时延低于10 ms。田间试验结果表明,“报告(Report)”模式下通信总体成功率为99.3%;“请求(Request)”模式下通信总体成功率为92.5%,平均响应时间为123.07 ms。该研究将2.4 GHz LoRa技术应用于联合收获机之间的无线通信,可为联合收获机机群协同作业时通信提供可行方法。
联合收获机;物联网;无线通信;LoRa技术
0 引 言
随着农业生产开始向集约化、规模化及产业化的方向发展[1],田间收获作业模式逐渐开始采用多台联合收获机协同作业的形式,即联合收获机群作业模式[2]。多台联合收获机协同作业可更快完成收获作业任务,也便于作业人员集中管理。在特定情况下,相较单台大型联合收获机作业,使用多台小型联合收获机作业可更合理地分配作业任务,综合使用成本更低。
目前,国内外对于联合收获机群相关方向都展开了一些研究。Iida等提出了一种农机自动跟随控制系统[3],跟随者以不变的相对位置跟随引导行驶作业。Hao等提出了一种联合收获机和运粮车协同方案[4],跟随者根据领航者的指令控制自身的运动状态。在国内,白晓平等提出了一种基于领航-跟随结构的收获机群协同导航控制方法[5]。姚竟发等提出一种在联合收获机多机作业时的路径优化算法[6]。目前对于联合收获机机群作业的研究更多关注于协同导航方面[7],对于联合收获机在作业过程中的通信方案的相关研究较少。
现有无线通信技术,如Bluetooth、ZigBee、NB-IoT、数传电台、LoRa等都可以实现设备之间通信[8],其中Bluetooth[9]和ZigBee技术[10-12]的通信距离一般都小于300 m,对于大型农场作业环境,其通信距离相对较短。NB-IoT技术构建在现有蜂窝网络上[13],需要基站作为通信基础设施,对于部分田间环境无法满足作业要求。数传电台模块往往需要更高的费用,此外许多数传电台在通信时所使用的工作频段不仅需要申请,而且还需要缴纳相应的使用费用,成本较高。因此,考虑到成本、传输速率、传输距离、节点容量及部署方式,LoRa通信技术在联合收获机群间通信的应用有一定优势。LoRa Alliance的创始成员Semtech公司发布了2.4 GHz的LoRa芯片,使得LoRa的工作频段从Sub-GHz(即频率为1GHz以下,27 ~960 MHz)增加至2.4 GHz,由于2.4 GHz频段是各国通用的频段,提高了该技术的通用性,同时其部分性能得到提高[14]。
本文在分析LoRa技术参数的基础上,拟设计联合收获机群间通信网络结构,构建网络通信模型,利用NS-3网络仿真软件分析在联合收获机群间模拟通信场景下网络的通信性能,设计对应联合收获机群的机载终端,以解决联合收获机机群之间的通信问题,并在田间环境下进行测试。
1 联合收获机群通信网络
1.1 网络结构
在联合收获机群协同作业场景下,现有的相关研究都是采用领航者与跟随者的模式,即在机群中设有一台主机身份的联合收获机,其余联合收获机作为从机。因此,本文研究的联合收获机群通信网络结构以主机与从机的形式构建,即通信网络中的数据主要由从机端汇总至主机端,其通信网络结构如图1所示。
虽然在逻辑层联合收获机群中存在主机与从机关系,但主机与从机所用的硬件是相同的。因此在实际应用中可统一部署相同的硬件,只需改变程序中的主机与从机模式,后续分析中也同样保持通信网络中每个节点硬件参数的一致性。
1.2 节点工作方式
联合收获机群中的主机与从机的工作模式有所区别,其各自的工作状态如图2所示。
主机和从机都具有“请求(Request)”模式,节点在发起请求后会在设定时间内等待对方响应,从而实现一次可确认的发送。在状态类型上,从机具有“报告(Report)”状态,用于定时向主机汇报自身的数据。此外,两者最大的差别是接收窗口的开启情况,主机可自由发起数据发送请求,且在完成数据发送后立即打开接收窗口,准备数据接收,其中发送时间为数据传输时间;从机仅在需要接收响应消息时打开接收窗口,其余时间都处于关闭状态。
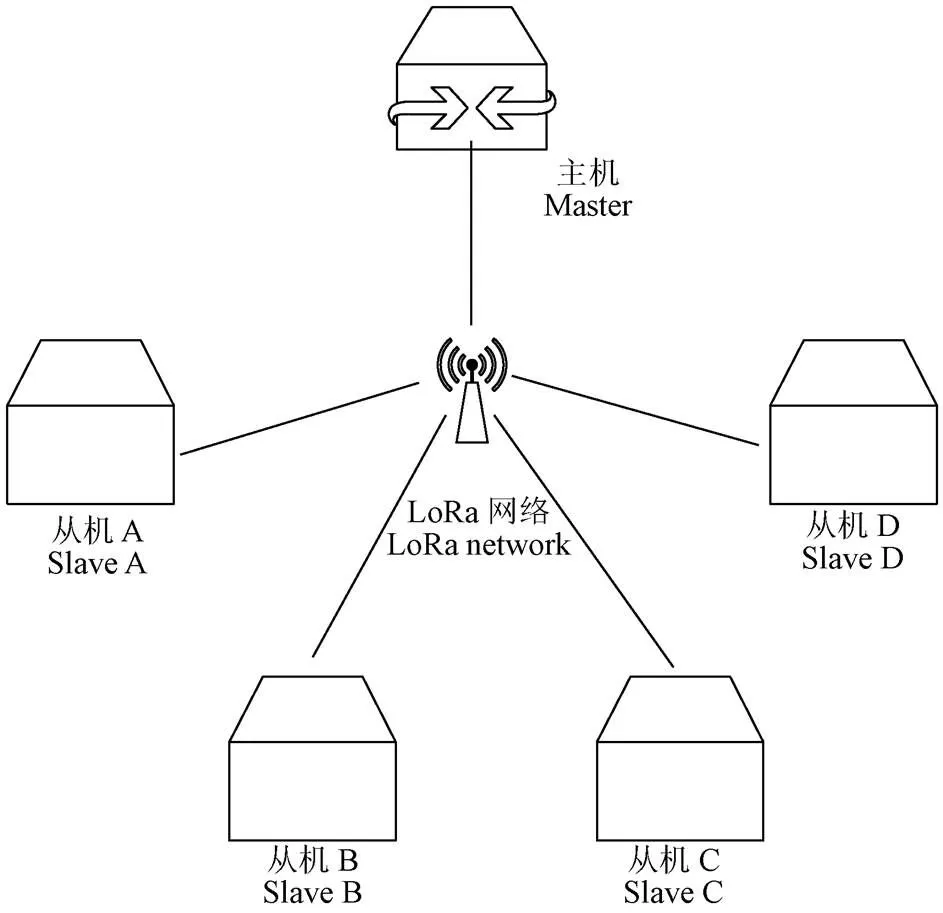
图1 联合收获机群通信网络结构
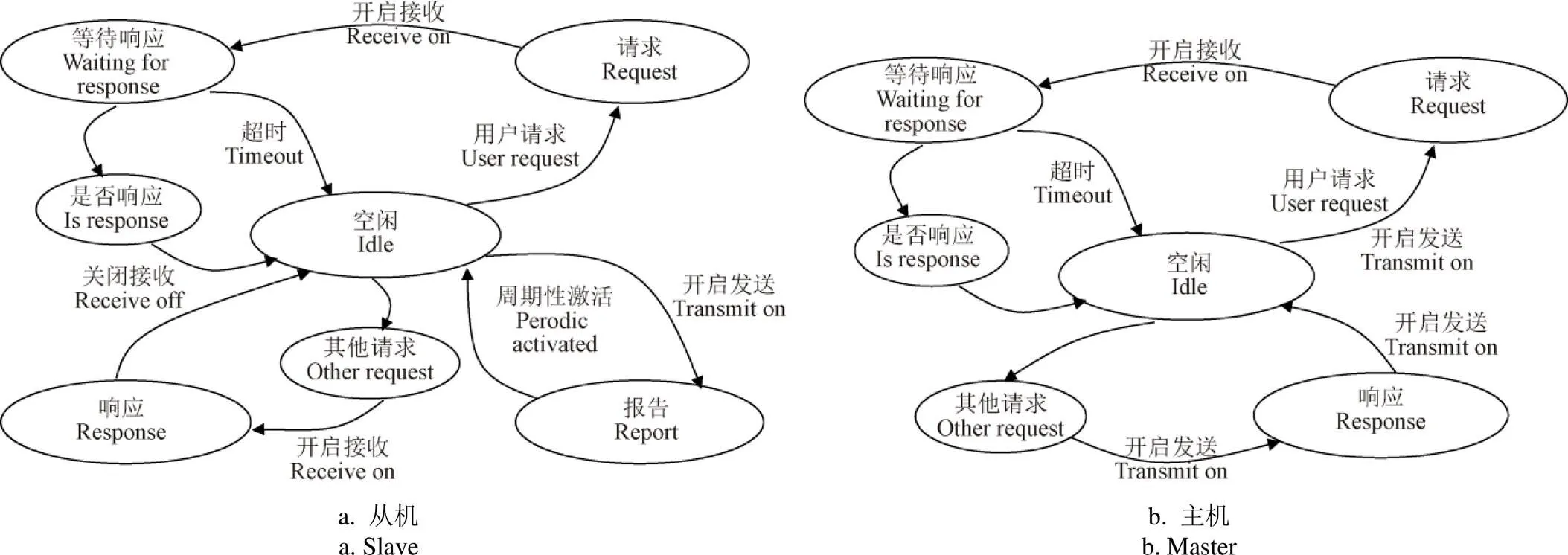
图2 主机和从机工作状态
2 LoRa技术基本原理
LoRa是一种具有前向纠错能力的扩频调制技术,是Semtech公司设计的物理层规范[15],可使用较低的功耗实现数公里的数据通信。作为CSS(Cascading Style Sheets)的一种变体,其调制频率线性调频脉冲而不改变相邻符号之间的相位[16],从而对数据进行编码。因此,LoRa调制过的信号能够抵挡噪声或频率相近信号的干扰,此外,该技术的传输带宽较大,可减少由低成本晶振引起的频率偏移,降低硬件成本。另外,该技术减少了消息包头大小和网络寻址方面的复杂性,从而在依赖较少基础设施的情况下以较低的功耗实现设备间的双向通信。
LoRa技术的传输比特率计算如公式(1)所示。

式中BW为通信带宽、CR为编码率,SF为扩频因子。此外传输功率、载波频率不同程度地影响无线链路的性能表现。传输功率指的是发射端的射频发送功率,更高的发射功率可以实现更远的通信距离,但是受地方法规限制。载波频率是无线信号传输时的中心频率,该参数由LoRa芯片决定,同时,不同的工作频段受地方法规有所限制。带宽所占传输频段的宽度。较高的带宽通常可带来更高的传输速率,但同时会引入更多的噪声干扰,从而使灵敏度会更低。相对应,较低的带宽传输速率较低,灵敏度更高。具体带宽可选范围由所用芯片的可选带宽参数决定。扩频因子作为LoRa通信中的重要参数,极大地影响通信距离和速率,其实质为符号速率与芯片速率之间比值。扩频因子增加1倍,其传输速率降低50%,同时传输时间增加导致功耗增加[17]。由于LoRa不同的扩频因子之间是正交关系,不同的扩频因子在通信过程中不受相互干扰的。编码率是进行循环纠错编码时所使用的编码速率,可设置为4/5、4/6、4/7和4/8,编码率影响实际发送的数据长度以及数据纠错能力。
根据实际仿真需求以及应用便利性,本文选择NS-3作为LoRa网络模型的仿真平台。NS-3是一种用于研究和教育用途的网络仿真软件,由全球开源社区开发维护,采用GNU GPL证书[18]。NS-3本身是一个离散时间模拟器,通常在命令行端运行,使用C++编写开发。NS-3提供了分组数据网络工作和执行的模型,并提供了仿真引擎用于仿真试验。建立模拟事件即由NS-3的调度程序组织C++函数调用。用户将NS-3源码编译为共享或静态库,并链接到main()程序,main()程序执行模拟场景的配置并运行和停止模拟器。
3 LoRa网络模型
3.1 射频芯片模型
目前,支持2.4GHz LoRa通信的射频芯片仅有Smetch公司的SX1280系列芯片,因此本文使用该芯片作为每个节点的LoRa芯片,芯片模型参数均参考,如表 1[19]所示。
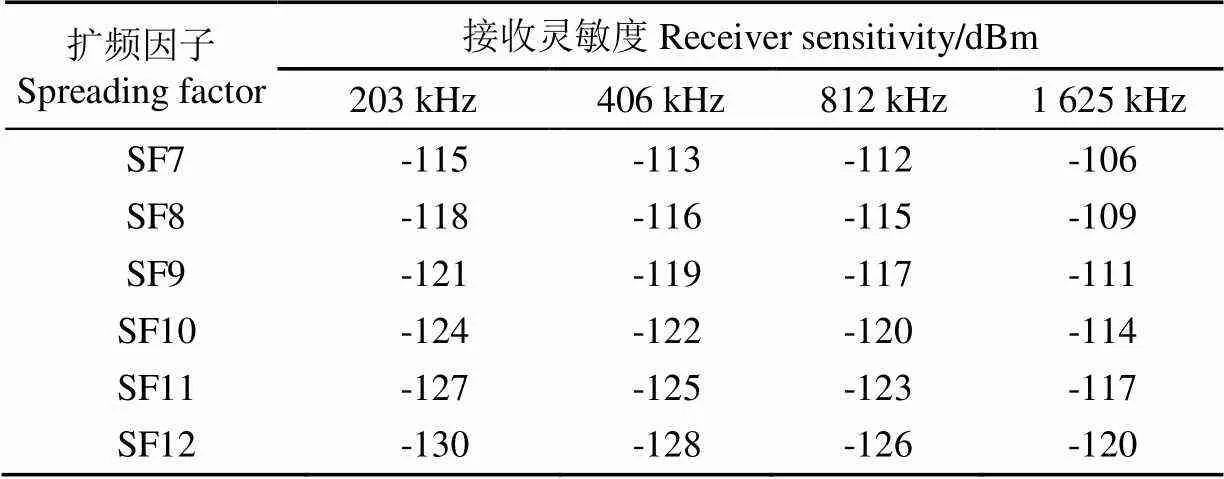
表1 SX1280芯片参数
根据LoRa芯片的运行机制,为每个终端设备分别建立物理层及控制层。使用NS3系统中的Channel模块,将多个模拟的LoRa设备注册至该模块,完成对注册设备的发送及接收行为的调度,从而模拟现实中在无线信道上LoRa设备的收发过程。芯片模型结构如图3所示。

图3 芯片模型结构图
Mac层负责定义设备工作模式,由应用层需求设定LoRa设备工作参数(包括扩频因子、带宽、频率、编码率、接收通道数量等),并根据应用场景模拟芯片收发模式。物理层完成对LoRa的物理层建模,模拟芯片运行状态(包括发送、接收、空闲、睡眠状态)转换,接收灵敏度参数、信号传输时间。该层中发送函数负责将发送时间依据传输时间交由Channel模块完成事件调度,其中接收函数由Channel模块唤醒执行,经信号碰撞模型计算确认数据包接收状态。
Channel模块负责所有注册设备的数据包调度,模拟实际信道的时延及路径衰减。该模块根据无线信道模型计算信号经过路径衰减后的功率值,并调用执行LoRa的Phy层接收处理函数。
3.2 路径衰减模型
从发射端到接收端的无线信号传输链路[20]可用式 (2)表达。

根据讨论的应用场景,联合收获机作业环境为大面积开阔田地[21],由此可以设定仿真场景为自由空间,其定义为收发双方之间存在视距距离LOS (Line of Sight)(即在第一菲涅尔区至少达到60%清晰)。针对这种情况可使用自由空间路径损耗模型来计算通信中的路径损耗,该模型仅考虑收发点之间的损耗,忽略障碍物的干扰,计算如式(3)所示。

式中为信号频率,MHz,为收发点之间距离,km。
3.3 碰撞模型
由于本研究应用于联合收获机,在田间环境中几乎不存在其他无线设备,因此本文的碰撞模型中只考虑LoRa无线信号之间的干扰,忽略其他信号引入的干扰。因此,仅考虑具有部分正交特性的扩频因子之间的干扰问题,对此Goursaud等[22]计算了所有扩频因子(SF7~SF12)之间信道抑制,并由此获得一个相对SINR(信号与干扰加噪声比Signal to Interference plus Noise Ratio)阈值矩阵(式(4)),用于判断数据包能否在其他LoRa信号的干扰下存活。

式(4)中矩阵元素T,j的意义为使用扩频因子发送的数据包在扩频因子的信号干扰下能被正确接收的最小SINR值。无线信号在传输过程中时,空中同时存在多个LoRa信号的干扰,因此需满足所有干扰信号的边界条件,并对每个扩频因子的接收功率进行求和操作。
在实际过程中,机群之间的通信并不是时间同步的,因此数据包在空中相遇的时间并不是完全重叠的,如图4所示。

注:Prc,x为扩频因子x的接收功率;Prc,y为扩频因子y的接收功率;t1为数据包相遇时间;Tx为扩频因子x的数据包传输时间;Ty为扩频因子y的数据包传输时间。


3.4 节点分布及移动
联合收获机群仿真场景分为2种,分别为网络节点静止状态和移动状态。在网络节点固定不动的情况下,选择半径为3 km的圆形面积作为所有网络节点的部署范围,所有网络节点均匀部署在该圆形范围内。
网络节点移动情况对应联合收获机实际作业状态,参考大部分农田的分布形式,将其简化为棋盘状分布,即每个网络节点初始位置在固定间隔的点上。由于多台收获机同时作业时,每台机器之间的相对位置是复杂且不固定。因此在仿真时让每个节点随机活动,以1.5 m/s的速度在平面方向改变位置。
4 仿真结果与分析
4.1 扩频因子分配方案
对于由多个网络节点构成的LoRa网络,扩频因子分配方案对网络的性能参数有极大的影响,本文尝试对3种扩频因子分配方案进行仿真分析。
这3种分配方案分别为固定分配、平均分配和比例分配。固定分配将所有节点设置为统一的扩频因子值;平均分配将所有可选的扩频因子值范围平均分配给每个节点;比例分配相比平均分配,按相对距离以及分配比例完成节点扩频因子的设置。其中,扩频因子的分配比例参考相关研究[24-25]计算得出,具体数值如表(2)所示。

表2 扩频因子分配比例
为避免因发送间隔较小造成数据包无法及时处理而导致丢失,仿真中的发送间隔设置为30 s。其中,节点数量设置为50至250个,步长为50。仿真结果如图5所示。
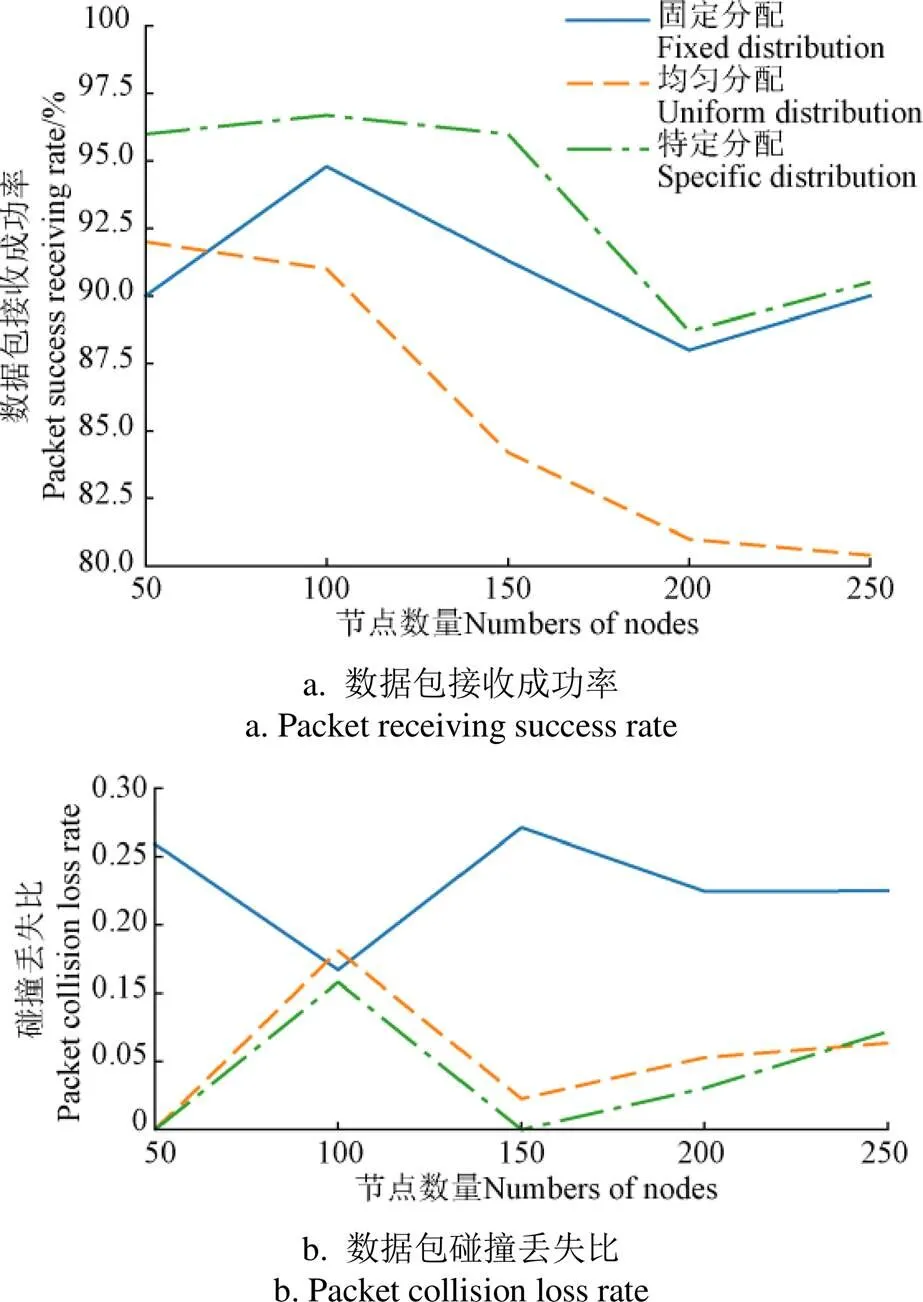
图5 不同扩频因子分配方案仿真结果
由图5a可知,在节点数为50时均匀分配和特定分配方案的成功率达到90%以上,随着节点数量增加,均匀分配的丢包率增加较为明显,数据包接收成功率整体下降,在节点数为250时成功率降至约80%。其他两个方案波动较小,其中特定分配的成功率均高于固定分配,且波动相对较小。
由图5b可知,固定分配方案在100节点数量时出现波动,比值为0.16,低于均匀分配,其余情况均比其他两类方案数值大。均匀分配在节点数为100时波动剧烈。而特定分配方案在多数情况下该值都优于其他两种方案,碰撞丢失比值保持在0.1以下,整体比较稳定。因此,特定分配方法可减少由于数据包碰撞引起的丢失。
4.2 静态节点场景分析
联合收获机群间的无线通信,需要考虑该网络可支持的设备数量以及可允许的最低发送间隔。仿真试验采用上文所述的静态模型,节点数量从1至50个,步长为1;发送间隔从0.05 s至20 s,步长为0.05 s;分别对203、406、812和1 625 kHz的带宽进行仿真分析,具体试验参数如表3所示。
图6为不同带宽下节点数量和发送间隔对数据包接收成功率的影响。由图6可知,当节点数量越多且发送间隔越短时,数据包丢失越严重。比较不同带宽条件可发现,1 625 kHz带宽下的表现要明显优于较小带宽的表现,从203 kHz带宽至1 625 kHz带宽,低色温面积逐渐减少,且出现在靠近节点数量轴的正方向和发送间隔的负方向,即可容纳更多节点和更短的发送间隔。

表3 LoRa网络仿真参数
为进一步分析节点数量和发送间隔对网络性能的影响,将数据包传输成功率高于90%作为通信合格指标,进一步分析在不同发送间隔情况下,可容纳的网络节点数量,结果如图7所示。由图7可知,仿真试验中设置最大节点数量为50个,最大发送间隔为20 s,203 kHz带宽未达到最大节点数量,而406、812和1 625 kHz带宽分别在12.5、6.25和3.15 s时达到仿真设置最大值,随着所用带宽增加,在相同发送间隔情况下,高带宽可容纳更多节点,同时其增长率也更快。

图6 静态场景下数据包接收成功率

a. 203 kHzb. 406 kHzc. 812 kHzd. 1 625 kHz
4.3 动态节点场景分析
在联合收获机群通信过程中,每台联合收获机都处于各自运动的状态,为此采用上文所述的动态节点模型,以静态仿真结果作为参考,分析网络在发送间隔1 s的情况下的表现。
如图8所示,在节点动态移动时,以1 s发送间隔可保证最大的节点数量。与静态仿真时结果类似,较大的带宽可容纳更多的节点完成通信,同时与静态结果相比在同样1 s的发送间隔下,可支持的节点数量有一定程度的减少。

图8 动态场景下支持节点数量
图9 为不同带宽条件下的平均接收信号强度指示(Received Signal Strength Indication,RSSI)值,即一次仿真结果中的所有节点每次通信时的RSSI值的平均值。RSSI值代表接收端接收到的信号强度,从图中可以看出,随着带宽的增大,RSSI值逐渐减小,同时该值均在SX1280射频芯片性能参数范围内,因此存在由于接收信号强度过低导致数据包丢失情况,符合仿真结果。
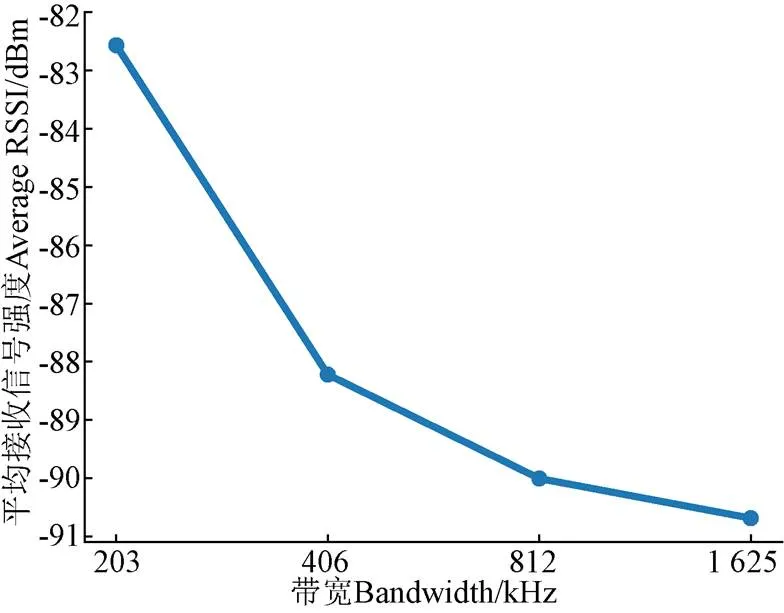
图9 动态场景下平均接收信号强度指示
图10为不同带宽条件下的平均通信时延,即仿真过程中每个节点每次通信时延的平均值。由图10可知,随着带宽的增加,通信时延逐渐降低。其中,203 kHz带宽的时延最大,约30 ms,1 625 kHz带宽的时延最小,约为10 ms。

图10 动态场景下平均时延
5 田间试验
5.1 试验方法
田间试验地点为江苏省丹阳市肇达村农场,试验时间为2021年11月1日至3日。试验装置为自行设计的机载终端设备,采用STM32H743主控芯片和SX1280射频芯片,安装在联合收获机试验平台上。联合收获机试验平台为沃得皓龙4LZ-8F轮式纵轴流联合收获机,机载终端和试验场景如图11所示。

机载终端主要有MCU系统主控单元、STM32H74单片机(MCU系统主控单元),SX1280模块(loRa网络通信部分)、人机交互和数据存储部分、以及作业参数传感器和性能参数传感器部分,结构框图如图12所示。

图12 机载终端结构框图
机载终端人机交互界面,如图13所示。
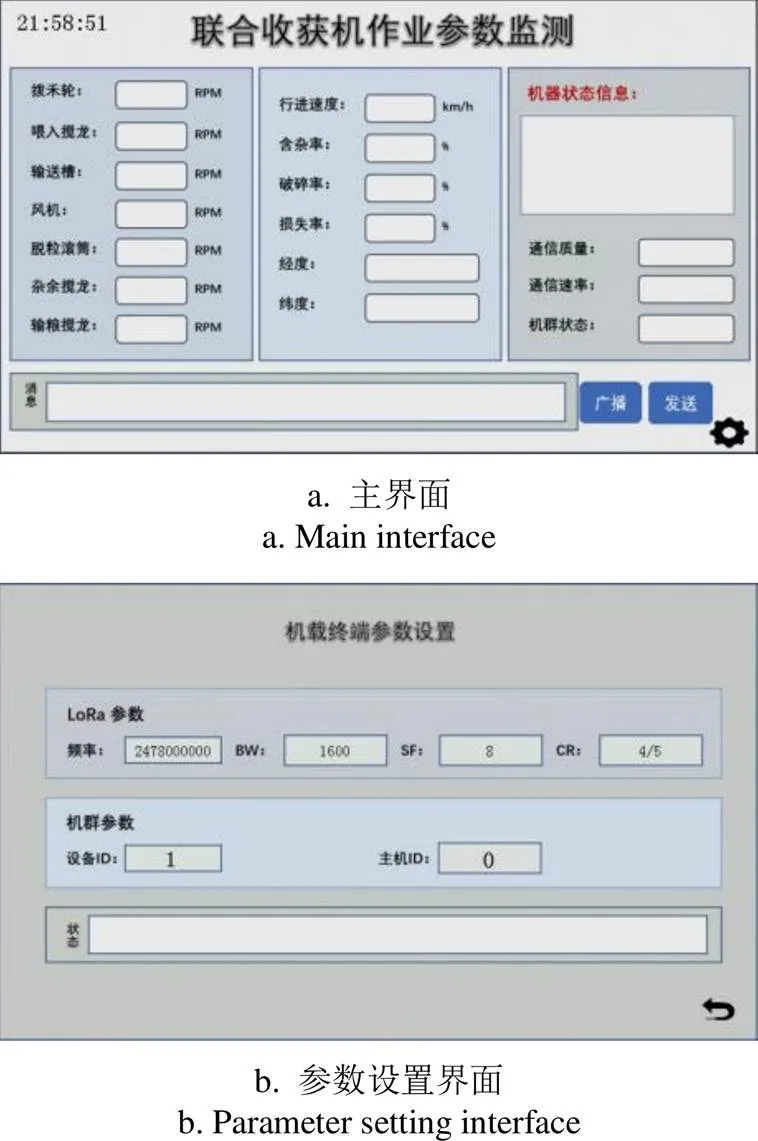
图13 机载终端人机交互界面
5.2 试验内容
试验设置2个机载终端分别为主机与从机模式,并在过程中保持两者位置相对固定,相对距离保持在240 m左右。分别测试Report和Request模式下的通信性能。
对于Report模式,设置从机以不同的发送间隔向主机发送固定长度的作业数据,测试该模式下数据包传输成功率。对于Request模式,从机按不同的发送间隔发送请求,并在250 ms时间内等待主机响应,若从机成功接收到响应消息则表示通信成功,其中请求和回应消息长度相同。试验参数如表4所示。

表4 试验参数
5.3 结果与分析
测试过程中每个发送间隔每次测试数据包数量为100个,重复3次试验。在Report模式下,记录主机接收到数据包数量,结果如表5所示,主机接收从机发送的数据包的平均成功率在98%以上,且在不同的发送间隔下成功率变化并不明显。
在Request模式下,一次成功的通信需要主、从机各发送一次数据包,通过从机端记录发送数据包时间戳和接收数据包时间戳计算出该模式下的响应时间。该模式下的测试结果分别如表5和表6所示。

表5 Report和Request模式下的数据包接收成功率
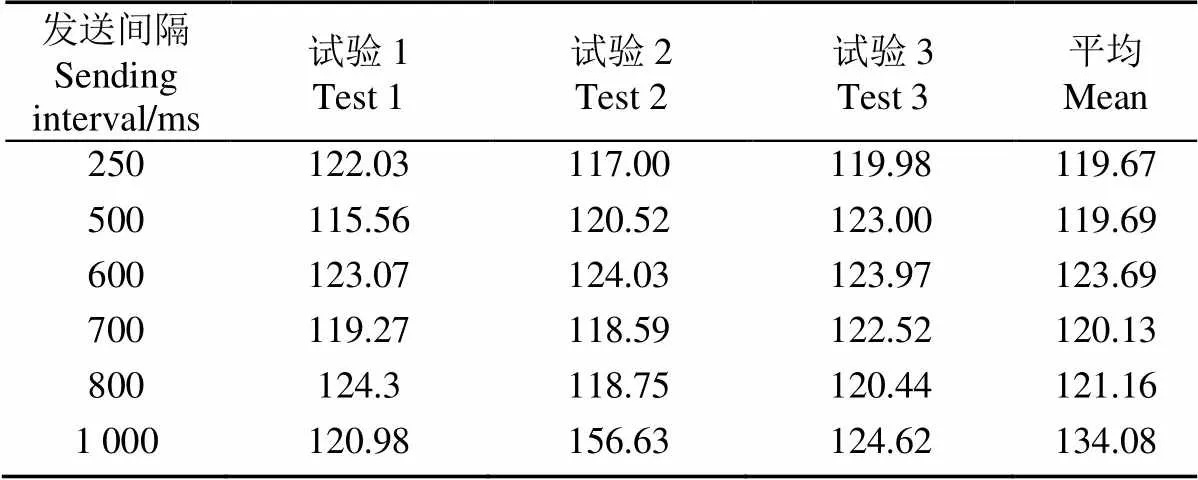
表6 Request模式下的响应时间
在“Request”模式测试时,由于数据包传输时间限制,最小发送间隔设置为250 ms。由表5可知,相比“Report”模式,其通信成功率明显降低,其原因除需要进行连续2次通信外,主机处理能力同样会影响通信成功率。SX1280仅有一条接收通道,当短时间内有较多数据包发送至主机时会出现接收窗口被占据的情况,因此一定程度上限制了该模式下的网络表现。
由表6可以看到,在该试验条件下,Request模式的总体平均响应时间为123.07 ms,基本满足联合收获机群对于有应答通信的应用需求。此外,该指标受发送数据包长度、通信环境及参数影响。同时,根据该模式下的响应时间与数据包有效载荷,可使用式(6)估算有效数据传输速率。

根据测试数据计算得有效数据传输速率约为33.15 ×103bit/s,同时根据semtech公司提供的参考值,其理论传输速率为71.09 ×103bit/s。与理论计算值存在较大差距,其原因一方面由于Request模式并不是设计用于准确地测试传输速率,测得的响应时间仅代表在该工作模式下完成一次通信流程花费的时间,因此与实际空中传输时间存在较大出入。此外,由于测试环境及硬件设备的影响,该场景下所设置的参数并不是最佳值,与理论情况下有一定差距。
6 结 论
本文研究了2.4 GHz LoRa技术在联合收获机群通信网络应用的表现,介绍了联合收获机群通信网络结构和工作模式,建立对应的网络模型,使用NS-3网络仿真平台进行分析,最后在田间试验中测试了所设计机载终端和通信程序的表现,主要结果如下:
1)仿真分析了不同扩频因子分配方案的通信,结果表明机群通信采用按相对距离以及特定比例动态分配方案表现最佳。在静态场景下高带宽与小带宽相比,高带宽可容纳更多的节点以及更短的发送间隔,在1 625 kHz带宽1 s发送间隔下,可同时容纳25个节点进行数据通信。动态场景下通信最大时延约为30 ms,最小时延低于10 ms。
2)田间试验使用自行设计的机载终端分别测试了Report和Request模式的通信。在Report模式下,不同发送间隔总体通信成功率为99.3%。在Request测试中,通信总体成功率为92.5%,较小发送间隔时成功率有所降低,主要原因为所用硬件的接收通道较少,总体平均响应时间123.07 ms,有效数据传输速率约为33.15×103byte/s。
综上,LoRa网络可基本满足联合收获机群通信对于容纳设备数量和发送间隔需求,可根据通信间隔需求适当调整机群中节点数量。Report模式支持更高的通信频率,适用于联合收获机群作业数据上报,Request模式可适合低频率的有应答的通信。2.4 GHz LoRa通信技术应用于联合收获机群通信具有一定的可行性及实际价值。同时,通过仿真和实际试验结果可以看到,对于实时性要求较高以及高频通信的应用场景,2.4 GHz LoRa仍存在较大的挑战,一方面由于该技术传输速率相对不高,另一方面对于大量的数据包接收情况,单通道的接收方式限制了其接收能力,需要进一步借助多通道硬件改善。
[1] 王炫凯,曲宝成. 我国粮食安全面临的主要风险与对策研究[J].粮食问题研究,2021(1):18-23.
[2] Shearer S A, Pitla S K, Luck J D. Trends in the automation of agricultural field machinery[EB/OL]. 2011-11-10,www.clubofbologna.org.
[3] Iida M, Kudou M, Ono K, et al. Automatic following control for agricultural vehicle[C]//. Nagoya, Japan. 6th International Workshop on Advanced Motion Control. 2000.
[4] Hao Y, Laxton B, Agrawal S K, et al. Differential flatness-based formation following of a simulated autonomous small grain harvesting system[J]. Transactions of the ASAE, 2004, 47(3): 933-941.
[5] 白晓平,王卓,胡静涛,等。基于领航-跟随结构的联合收获机群协同导航控制方法[J].农业机械学报,2017,48(7):14-21.
Bai Xiaoping, Wang Zhuo, Hu Jingtao, et al. Harvester group corporative navigation method based on leader-follower structure[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 14-21. (in Chinese with English abstract)
[6] 姚竟发,滕桂法,霍利民,等. 联合收割机多机协同作业路径优化[J].农业工程学报,2019,35(17):12-18.
Yao Jingfa, Teng Guifa, Huo Limin, et al. Optimization of cooperative operation path for multiple combine harvesters without conflict[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(17): 12-18. (in Chinese with English abstract)
[7] 张漫,季宇寒,李世超,等. 农业机械导航技术研究进展[J].农业机械学报,2020,51(4):1-18.
Zhang Man, Ji Yuhan, Li Shichao, et al. Research progress of agricultural machinery navigation technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 1-18. (in Chinese with English abstract)
[8] 张铮,曹守启,朱建平,等. 面向大面积渔业环境监测的长距离低功耗LoRa传感器网络[J]. 农业工程学报,2019,35(1):164-171.
Zhang Zheng, Cao Shouqi, Zhu Jianping, et al. Long range low power sensor networks with LoRa sensor for large area fishery environment monitoring[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019,35(1):164-171. (in Chinese with English abstract)
[9] 盛红梅,李旭伟. 蓝牙技术主要原理综述[J].计算机时代,2009(3):6-7,10.
[10] 蒲泓全,贾军营,张小娇,等. ZigBee网络技术研究综述[J].计算机系统应用,2013,22(9):6-11.
Pu Hongquan, Jia Junying, Zhang Xiaojiao, et al. A survey on ZigBee network technology research[J]. Computer System Application, 2013, 22(9): 6-11. (in Chinese with English abstract)
[11] 杨旭辉,周庆国,韩根亮,等. 基于ZigBee的节能型水产养殖环境监测系统[J]. 农业工程学报,2015,31(17):183-190.
Yang Xuhui, Zhou Qingguo, Han Genliang, et al. Energy-efficient aquaculture environmental monitoring system based on ZigBee[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015,31(17):183-190. (in Chinese with English abstract)
[12] 韩华峰,杜克明,孙忠富,等. 基于ZigBee网络的温室环境远程监控系统设计与应用[J]. 农业工程学报,2009,25(7):158-163.
Han Huafeng, Du Keming, Sun Zhongfu , et al. Design and application of ZigBee based telemonitoring system for greenhouse environment data acquisition[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009,25(7):158-163. (in Chinese with English abstract)
[13] 杨观止,陈鹏飞,崔新凯,等. NB-IoT综述及性能测试[J].计算机工程, 2020,46(1):1-14.
Yang Guanzhi, Chen Pengfei, Cui Xinkai, et al. Overview and performance test of NB-IoT[J]. Computer Engineering, 2020, 46(1): 1-14.
[14] Buurman B, Kamruzzaman J, Karmakar G, et al. Low-power wide-area networks: Design goals, architecture, suitability to use cases and research challenges[J]. IEEE Access, 2020(99): 17179-17220.
[15] LoRa Alliance, LoRa-alliance technology[EB/OL]. 2022-03-26, https: //www. lora-alliance. org/technology
[16] Lora modulation basics an1200[EB/OL]. 2022-03-26, https: //www. semtech. com/uploads/documents
[17] Adelantado F, Vilajosana X, Tuset-Peiro P, et al. Understanding the limits of LoRaWAN[J]. IEEE Communications Magazine, 2017, 55(9): 34-40.
[18] 马春光,姚建盛. ns-3网络模拟基础与应用[M]. 北京:人民邮电出版社,2014.
[19] SX1280 Datasheeet[EB/OL]. 2022-03-26, https: //www. semtech. com/products/wireless-rf/lora-24ghz/sx1280
[20] Janssen T, Bnilam N, M A ernouts, et al. LoRa 2. 4 GHz communication link and range[J]. Sensors, 2020, 20(16): 4366.
[21] Vangelista L, Centenaro M, Magrin D. Performance evaluation of LoRa networks in a smart city scenario[C]// Paris, France: 2017 IEEE International Conference on Communications (ICC), 2017.
[22] Goursaud C, Gorce J M. Dedicated networks for IoT: PHY / MAC state of the art and challenges[J]. EAI Endorsed Transactions on Internet of Things, 2015, 1(1): e3.
[23] Ikuno J C, Wrulich M, Rupp M. System level simulation of LTE networks[C]. Taipei, Taiwan: 2010 IEEE 71st Vehicular Technology Conference, 2010.
[24] Slabicki M, Premsankar G, Francesco M D. Adaptive configuration of lora networks for dense IoT deployments[C] // Taipei, Taiwan: Network Operations and Management Symposium, 2018.
[25] Reynders B, Meert W, Pollin S. Power and spreading factor control in low power wide area networks[C]// Paris, France: IEEE International Conference on Communications(ICC), 2017.
Communication method for combine harvester group using Lora technology
Chen Jin1, Fu Shengjie1, Guan Zhuohuai2, Zhu Fuhao1, Zhu Linjun3, Xia Hui3, Xing Licheng3
(1.,,212013,; 2.,,210014; 3..,.,212300)
Multi-machine harvesting has been the popular form to improve the operation efficiency of the combine harvester, particularly with agricultural intensification, scale, and industrialization. The demand can also be required for the Internet of Things (IoT) and wireless communication of the combine harvester group. However, the current communication technologies of the IoT cannot fully meet the unstructured and large-scale agricultural scenarios, due mainly to the industrial design with the relatively short communication distance, low reliability, and high cost. Fortunately, the LoRa technology has unique advantages in the transmission distance, transmission rate, node capacity, and deployment mode. Moreover, the lower cost is suitable for the large-scale deployment of agricultural vehicles. At the same time, the parameters of LoRa technology can fully meet the needs of wireless communication in the operation scenario of combine harvester group. In addition, the 2.4 GHz band can further improve the performance of LoRa technology and regional universality. Therefore, wireless communication can be expected to apply to the scenario of combine harvester group. In this study, a communication network structure was proposed for the working mode of combine harvester group using the 2.4 GHz LoRa technology. Firstly, the LoRa network structure was constructed for the joint harvester cluster in the form of host and slave. The working mode of each node was then set using the cooperative operation scenario of the harvesters group. A radio frequency chip model (SX1280) was selected to simulate the transceiver mode, according to the application scenario. The optimal path attenuation model was chosen for the maximum communication distance between the master and slave. Secondly, a simulation model was established to optimize the application parameters of LoRa using NS-3 network platform, including the bandwidth, coding rate, spreading factor, transmission power, and frequency. The static and moving state of network nodes were used for the simulation scenarios of combine harvester communication network. Once the network nodes were fixed, a circular area with a radius of 3 km was selected as the deployment range of all network nodes. All network nodes were deployed in the circular range, according to the law of uniform distribution. The allocation scheme of spread spectrum factor was selected to accommodate the number of nodes and the minimum transmission interval in the simulated communication scenario of combine harvester cluster. Finally, the hardware and software were designed for the hardware terminal in the communication protocol of the combine harvester group. Both simulation and field experiments were conducted to comprehensively evaluate the effectiveness of the new LoRa for the combine harvesters group. The simulation results show that the spread spectrum factor with the specific proportion improved the network communication performance in the application scenario. When more than 90% of the reception success rate was guaranteed, the 1 625 kHz bandwidth supported by the 25 nodes to communicate at a 1 s transmission interval in a static scenario. In the dynamic scenario, the communication delay was less than 10 ms under 1 625 kHz bandwidth. The field test results show that the overall success rates of communication were 99.3%, and 92.5% under the “Report” and “Request” modes, respectively. The average response time was 123.07 ms. Consequently, the LoRa technology was applied for wireless communication between the combine harvesters, which can fully meet the requirements of joint harvester cluster communication for the number of accommodated devices and transmission interval. The number of nodes in the cluster can also be adjusted appropriately, according to the requirements for the communication interval. The Report mode supported the higher communication frequencies suitable for the reporting data from the combined harvesters, while the Request mode was suitable for the lower frequency, and responsive communications. The finding can provide a feasible solution to the mutual communication of the combine harvester clusters during cooperative operation.
combine harvester; internet of things; wireless communication; LoRa technology
10.11975/j.issn.1002-6819.2022.16.009
S225.3
A
1002-6819(2022)-16-0081-09
陈进,傅晟捷,关卓怀,等. 基于LoRa技术的联合收获机群通信方法[J]. 农业工程学报,2022,38(16):81-89.doi:10.11975/j.issn.1002-6819.2022.16.009 http://www.tcsae.org
Chen Jin, Fu Shengjie, Guan Zhuohuai, et al. Communication method for combine harvester group using Lora technology[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(16): 81-89. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.16.009 http://www.tcsae.org
2022-04-14
2022-08-04
江苏省科技成果转化项目(BA2020054);江苏省自然科学基金青年基金项目(BK20210040);江苏省农业农村厅现代农机装备与技术示范推广项目(NJ2022-08)
陈进,博士,教授,博士生导师,研究方向为智能农业装备检测和控制。Email:chenjinjd126@126.com
猜你喜欢
计算机与数字工程(2022年3期)2022-04-07
中国农村科技(2021年12期)2021-12-28
民用飞机设计与研究(2020年4期)2021-01-21
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北农机(2020年2期)2020-01-08
物联网技术(2018年8期)2018-12-06
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
科技资讯(2017年18期)2017-07-19
浙江大学学报(工学版)(2016年9期)2016-06-05
