
内河航道管理中无人机的应用分析
2023-01-12 07:17严秀秀
科技创新与生产力 2022年11期
严秀秀
(安徽省港航管理局淮河航道局,安徽 蚌埠 233000)
传统的内河航道管理工作通常采用汽艇巡逻方式,以人工肉眼进行观察,工作效率低,工作量大,不能及时发现问题,特别是对于地理条件较为恶劣的河段,难以实施有效的管理。无人机可携带多角度摄像机,结合机器视觉分析技术,快速实现针对性巡查,准确获取位置信息,具有视角大、响应快、方便取证等特点,非常适合航道管理应用[1-2]。本文研究淮河航道管理中的无人机应用情况,对常见的应用场景进行分析,用实际数据对无人机航拍测量的光束法空中三角测量的精度进行论证。
1 无人机在航道管理中的应用
淮河安徽段具有险滩密布、沼泽遍布、植被密布、地形复杂等特点,全线航道管理困难。无人机可搭载多镜头高清摄像系统,具有视角大、响应及时、方便取证、准确度高等诸多优点,可以很好地解决淮河航道巡视管理的难题。无人机在淮河的航道管理中有如下应用。
1)用于航道沿线构筑物的观测。许多沿线构筑物会在枯水期露出水面,利用无人机对航道沿线构筑物进行观测,完成点位坐标测量,开展巡检工作,针对构筑物的变化情况和损毁情况进行统计。
2)用于临河设施的测量。淮河沿线的码头数量较多,浮式码头与水位的变化关系密切,无人机能快速测绘码头的数据,提供精确的位置变化信息。
3)用于岸线和险滩的测量。无人机进行航道测绘,精度高,效率高,能够真实反映险滩与岸线的变化情况。
4)用于船舶位置的监测。无人机可识别船只,准确测量船舶位置,对非法采砂等违法行为进行调查取证。
无人机在航道管理中的实际应用涉及无人机航拍测量,下文将对无人机航拍的测量原理进行阐述,并用实际数据评价测量精度。
2 无人机空中三角测量
2.1 光束法空中三角测量原理
无人机携带相机对地面的目标进行测量,通常采用光束法空中三角测量。测量时,由像片的一束光线组成平差单元,平差的基础方程由中心投影的共线方程确定,然后通过投影空间的旋转变换和平移变换,实现待测目标的光线交汇,形成公共点[3]。将整个待测区域的最佳交汇点融入到已知的控制点坐标系中,进行平差计算,进而确定地面坐标。测量原理见图1。
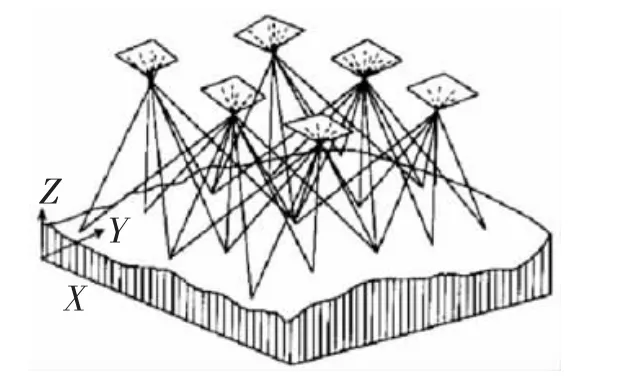
图1 光束法空中三角测量
目前,无人机航拍空间测量采用全自动处理的空三软件,即利用上述原理,在无人机航拍的图像中自动识别航向和旁向的像素点,将待测区域中各个航带网融入到比例尺统一的坐标系统中,组成区域网。通过计算确认每张像片的外方位元素和地面点坐标的概略位置,然后根据外业控制点,逐点建立误差方程式和改化方程式,求解方程得出每张像片的外方位元素和加密点的地面坐标[4]。对于一个待测区域来说,通常会有几条甚至几十条航带,像片数将有几十张甚至几千张。通过叠加修正运算即可得到准确的测点地面坐标。光束法空中三角测量计算流程见图2。
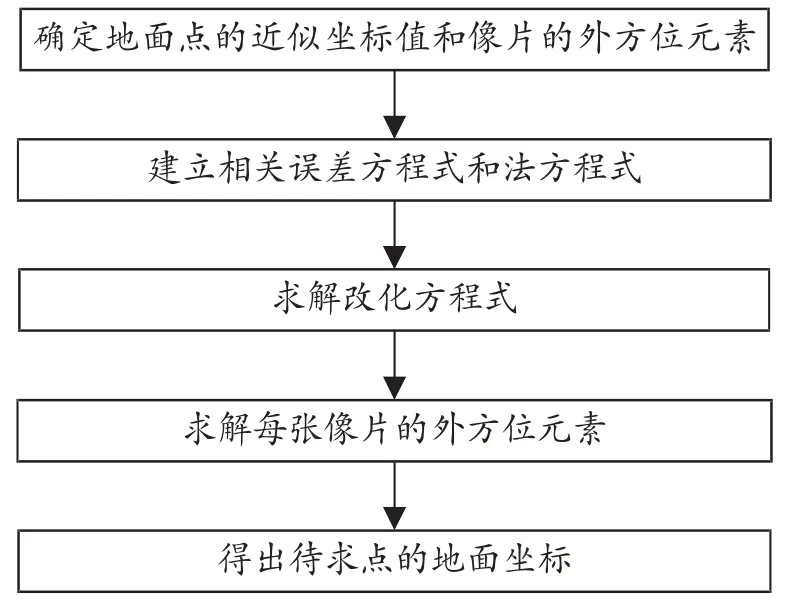
图2 空中三角测量法的计算流程
2.2 无人机测量系统
本文使用的无人机巡航系统是大疆M300RTK+PSDK102S系统。技术参数见表1。PSDK102S系统是一款三轴五镜头倾斜摄像系统,中间镜头为主摄像镜头,能够拍摄正视图像,四周均布设4个倾斜镜头,可以拍摄倾斜图像。5个镜头拍摄的图像进行叠加运算,可得到修正的综合图像。

表1 大疆M300RTK+PSDK102S系统参数
2.3 无人机测量的精度分析
平面测量相对误差和高程测量相对误差是评价无人机在测量时精度的重要指标[5]。平面测量相对误差的计算表达式为

高程测量相对误差的计算表达式为

式(1)和式(2)中:Δx为x方向实测控制点的坐标值与无人机航拍测得的坐标值之差;Δy为y方向实测控制点的坐标值与无人机航拍测得的坐标值之差;Δh为高度方向Δh实测控制点的坐标值与无人机航拍测得的坐标值之差。
在淮河某段航道5 km范围内,设定20个基准控制点,无人机沿预定航线进行平面测量和高程测量,航拍测量参数见表2。基准点的数量会影响加密运算精度,选择以4~20的双数基准控制点,共9种情况进行对比分析,获取图像共计50 000张,用于测量精度统计分析。

表2 无人机航拍测量参数
对平面测量和高程测量的结果进行分类统计,按照式(1)和式(2)计算测量结果的相对误差,得到基于倾斜图像的测量相对误差(见表3),基于正视图像的测量相对误差数据(见表4),基于综合图像的测量相对误差数据(见第66表5)。
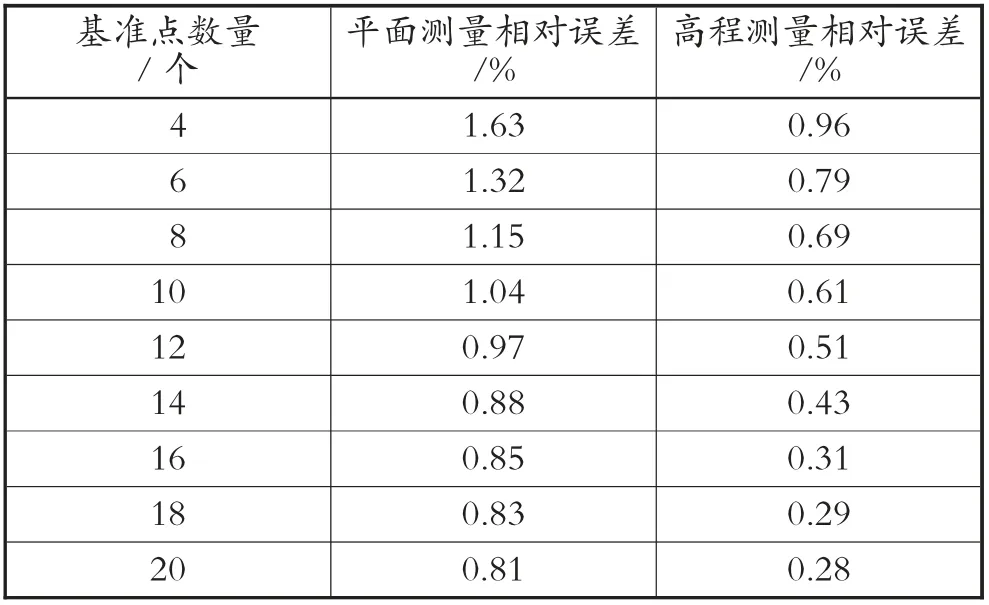
表3 倾斜图像测量的相对误差统计数据
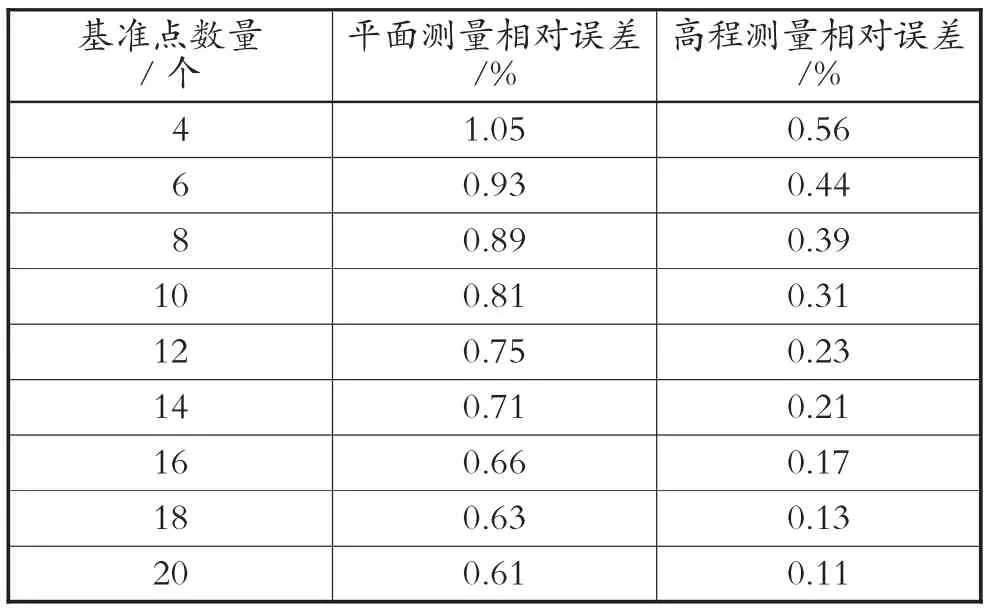
表4 正视图像测量的相对误差统计数据
由表3数据可知,基于倾斜图像的测量结果中,平面测量的相对误差最大为1.63%,高程测量的相对误差最大为0.96%,均是出现在只有4个基准控制点的情况下。随着基准控制点数增多,精度得到了明显改善,当基准点数量达到12个时,平面测量相对误差降至1%以内,测量精度尚可接受。
由表4数据可知,基于正视图像的测量结果中,平面测量的相对误差最大为1.05%,高程测量的相对误差最大为0.56%,也是出现在基准控制点数最少的情况下。随着基准控制点数增多,测量精度得到了大幅提升。
由表5数据可知,平面测量的相对误差最大为0.73%,高程测量的相对误差最大为0.31%,相应的变化规律与倾斜图像和正视图像测量数据反映的规律一致。

表5 综合图像测量的相对误差统计数据
为了进行综合对比分析,将倾斜图像、正视图像和综合图像得到的平面测量误差数据绘制成曲线(见图3),高程测量误差数据绘制成曲线(见图4)。
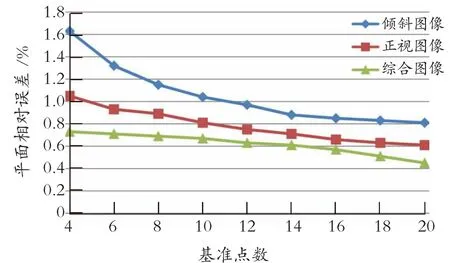
图3 平面测量误差数据曲线
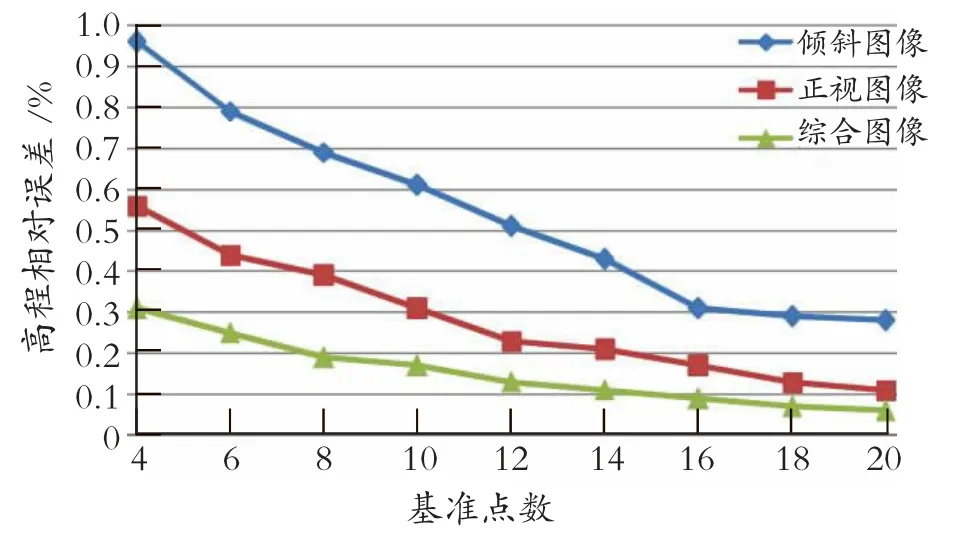
图4 高程测量误差数据曲线
由图3和图4可知,基于倾斜图像的测量误差是最大的,倾斜摄像机在实际拍摄过程中,由于像片倾斜会引起像点位移,从而导致测量精度较低。相应的,基于综合图像的测量误差,在平面测量和高程测量中,相对误差均最小。综合图像是由5个摄像机拍摄的图像叠加运算而成,系统对图像进行了修正运算,因此测量精度最高。基于正视图像的测量精度介于二者之间,但明显优于基于倾斜图像的测量精度,在航道巡检测量要求不高的任务中,可直接使用,减少系统运算量,进一步提高效率。此外,随着基准点数量的增加,无人机测量系统对于数据修正的能力增强,平面测量和高程测量的精度都得到了显著提高。由此可见,选择合适数量的基准控制点非常关键。
3 无人机在淮河航道管理中的运用
近期淮河流域遭遇严重气象干旱,淮河全线水位快速下降,吴家渡附近水位降至11.35 m,已接近最低通航水位。津浦铁路桥位于吴家渡水文站附近,此处的浅滩和礁石现已露出水面,严重影响船舶的航行安全。为保障淮河船舶航行安全,进一步掌握津浦铁路桥附近浅滩的详细情况,淮河航道局组织专业技术人员赴现场进行详细勘测。测绘人员采用无人机对津浦铁路桥附近浅滩进行弓字形多维度航拍,绘制高分辨率正视图像,并拍摄了视频资料,形成了津浦铁路桥附近浅滩的详实资料(见图5)。为淮河航道的养护奠定了科学的数据基础,同时,无人机等先进设备的应用也为淮河航道日常管理和应急保障提供了有力支撑。

图5 重生成的二维影像图
另外,无人机在淮河航道发生洪灾、船舶碰撞等安全事故时,在救援人员不能及时抵达现场的情况下,无人机能及时掌握现场情况,为决策者提供第一手资料。
4 结束语
本文对无人机在淮河航道管理的应用场景进行了分析,阐述了光束法空中三角测量的原理,并对3种图像得到的实际测量数据进行了统计。结果表明,基于综合图像的测量,在平面测量和高程测量方面,精度最高;基于正视图像的测量精度次之;基于倾斜图像的测量精度最低;随着基准点数量的增加,3种图像的测量精度得到了明显改善。无人机在内河航道的巡检,效率高,方便迅捷,测量准确,在航道管理上有很多优势。
猜你喜欢
青年文学家(2021年31期)2021-12-12
阜阳师范大学学报(社会科学版)(2021年1期)2021-03-30
全球定位系统(2021年1期)2021-03-26
时代邮刊·下半月(2020年9期)2020-09-23
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
文史春秋(2017年11期)2018-01-23
北京航空航天大学学报(2017年4期)2017-11-23
治淮(2017年4期)2017-04-17
陕西画报(2017年1期)2017-02-11
