基于双目视觉的导线直径测量方法研究
2023-01-10 11:49汪新康蒋森屹余卓晓班革革
现代制造技术与装备 2022年12期
汪新康 刘 炳 蒋森屹 余卓晓 班革革 李 勃
(1.商丘市供电公司,商丘 476000;2.华北电力大学,保定 071000)
随着输电线路的大规模建设,电网中导线型号的构成变得复杂,使得准确分辨导线型号成为查勘的一项重要工作[1]。对于老旧线路和台账更新不及时的线路,查勘时仅依靠台账分辨导线型号不准确,还需要测量导线直径和清点最外层铝股数来辅助分辨导线型号。现有的测量手段主要是人工登杆通过游标卡尺或通过连接在绝缘操作杆顶端的导线抱夹测量导线直径,并清点导线最外层铝股数[2]。为了提高测量效率和安全性,提出一种非接触测量导线直径的新方法十分必要。
双目立体视觉测量技术是在计算机视觉的基础上发展起来的一种非接触测量技术[3]。这种技术不仅原理简单、精度高,而且对测量环境和测量对象的要求不高,非常适合用于查勘时测量导线直径。
本文研究基于双目视觉的导线直径测量方法,通过相机标定、图像采集、双目校正、边缘检测以及特征匹配等得到特征点之间的实际距离、像素距离以及导线直径的像素距离,从而得到导线直径。
1 测量原理
基于双目视觉的直径测量方法利用像素距离与实际距离之间的等比关系建立等式,即

式中:D为导线直径;L为空间中两点之间的实际距离;L1为两点之间的像素距离;D1为导线直径的像素距离。
在测量开始前标定相机,首先确定相机的外参矩阵和内参矩阵。其次,对图像进行处理,突出图像中导线的边缘信息,通过边缘检测获取导线边缘,根据边缘的像素坐标计算直径的像素距离。再次,对左右相机采集到的图像进行匹配,在匹配后图像中任选两个特征点,根据特征点的像素坐标计算像素距离。最后,根据相机的内外参矩阵,利用像素坐标计算其世界坐标,进而计算两点间的实际距离。
1.1 坐标转换及相机标定
为了计算两个特征点之间的实际距离,需要将特征点的像素坐标转换为世界坐标。单目视觉中,一点像素坐标到世界坐标的转换关系为
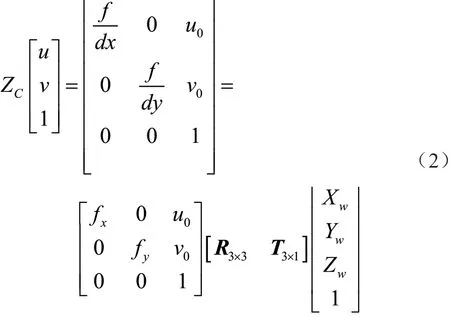
式中:ZC为空间中一点沿光轴方向到相机的距离;(u,v)为该点在图像中的像素坐标;f为相机的焦距;fx为焦距f与dx的比值;fy为焦距f与dy的比值;u0和v0是图像中心的像素坐标;(Xw,Yw,Zw)为该点的世界坐标;fx、fy、u0和v0共同组成了相机的内参矩阵;R3×3为旋转正交阵;T3×1为3×1的平移向量,共同构成了相机的外参矩阵。
为了便于计算,将世界坐标系原点建立在左相机光心处,此时Rl3×3=E,l3×3=0→T。根据式(2)写出左相机的转换关系为
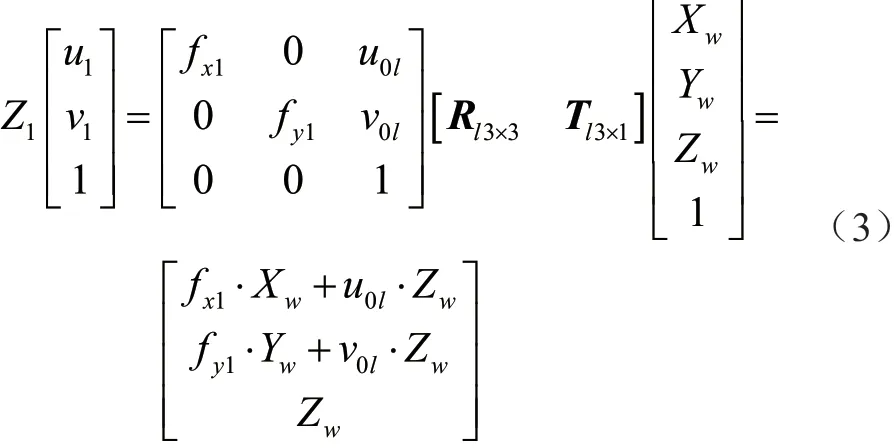
式中:Z1为空间中一点沿左相机光轴方向到左相机的距离;(u1,v1)为该点在左相机图像中的像素坐标;(Xw,Yw,Zw)为该点的世界坐标;fx1为左相机的焦距f1与dx1的比值;fy1为左相机焦距f1与dy1的比值;u0l和v0l是左相机图像中心的像素坐标。
根据式(2),写出右相机的转换关系为

式中:Z2为空间中点沿右相机光轴方向到右相机的距离;(u2,v2)为该点在右相机图像中的像素坐标;fx2为右相机焦距f2与dx2的比值;fy2为右相机焦距f2与dy2的比值;u0r和v0r是右相机图像中心的像素坐标;Rr3×3为右相机坐标系相对于左相机坐标系的旋转矩阵;Tr3×1为右相机坐标系相对于左相机坐标系的平移向量;mi(i=1,2,…,12)由右相机的内参矩阵与外参矩阵相乘所得。
联立式(3)和式(4),即可得到双目视觉中一点的像素坐标到世界坐标的转换关系为
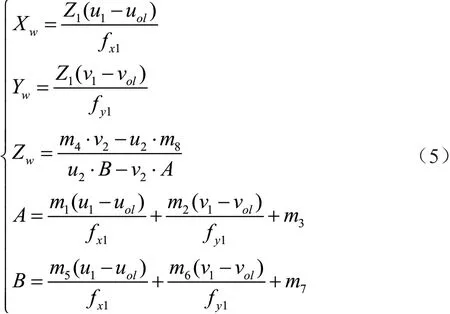
由式(5)不难看出,只要确定了相机的内参矩阵和外参矩阵,就可以利用某点的像素坐标(u1,v1)和(u2,v2)计算该点的世界坐标(Xw,Yw,Zw)。
双目标定的目的是获取两个相机的内参矩阵和外参矩阵。相机内外参数矩阵标定的可靠性将直接影响导线直径的最终测量精度。相机标定指利用已知的特征点坐标推算获得相机的内参和外参。张正友标定法是介于传统标定法和自标定法之间的一种方法[4],具有精度高、鲁棒性好以及操作简单等优点,因此被广泛应用。
1.2 图像处理和特征匹配
为了快速和准确地匹配左相机图像(下文均简称为左图)和右相机图像(下文简称为右图),需要对左图和右图进行图像处理。图像处理过程主要包括双目校正和边缘检测两大环节。实际拍摄时很难保证左右相机共面和光轴平行,可能会导致图像畸变。图像并不是水平对齐,传统的特征匹配策略为二维搜索,即遍历整个图像,匹配的准确率和效率大幅下降[5]。图像校正的原理是保证两个相机光心相对位置不动的前提下,通过矩阵变换将两个不同方向的图像平面重新投影到同一个平面且光轴互相平行[6]。这样两个相机的极线水平对齐,匹配时只需要沿着水平的极线方向搜索对应点即可。
若导线特征不明显,可以利用边缘检测使导线边缘轮廓明显,减少特征匹配错误率。常见的边缘检测方法有微分算子、Canny算子和高斯拉普拉斯算子(Laplacian of Gaussian,LoG)等。其 中,Canny算子的基本思想是先使用高斯函数平滑图像,再由一阶微分的极大值分割图像[7],具有定位精度高、误码率低和抑制虚假边缘等优点,更适用于检测导线图像的边缘。
经过双目校正和边缘检测,左右图像极线水平对齐,图像中导线边缘特征更加明显,然后对左图和右图进行特征匹配。特征匹配一般可分为3步:一是特征提取,即提取图像中的关键点作为图像的特征点;二是特征描述,即利用向量描述特征点的图像信息,要求特征向量与特征点一一对应;三是特征匹配,即特征向量之间的距离计算。
2 实验验证
2.1 实验环境
选取直径为18 mm的钢芯铝绞线在室外进行测量,实验环境如图1所示。测量系统由2台同型号的工业相机、75 mm焦距镜头、计算机等硬件以及相应的图像处理软件组成。实验的主要硬件装置见图2,相机的主要参数见表1。
2.2 相机标定
实验环境搭建完成后,对相机进行标定。将黑白棋盘格标定板置于不同姿态进行拍摄,左右相机拍摄的标定板图像如图3所示。利用MATLAB中tool_calib工具箱标注每张图像角点,并输入像素信息,得到标定结果如表2和表3所示。

图1 实验环境

图2 主要硬件

表1 相机的主要参数

图3 相机采集的标定图像

表2 相机内参标定结果

表3 相机外参标定结果
2.3 导线直径测量
测量直径时,先利用相机采集图像,再利用软件,对图像进行双目校正、边缘检测以及特征匹配。在匹配后的图像中选取两个特征点,计算两个特征点之间的实际距离和像素距离。共测量了4组,图4为某次测量的原始图像和图像处理结果,表4为特征点之间的实际距离和像素距离。
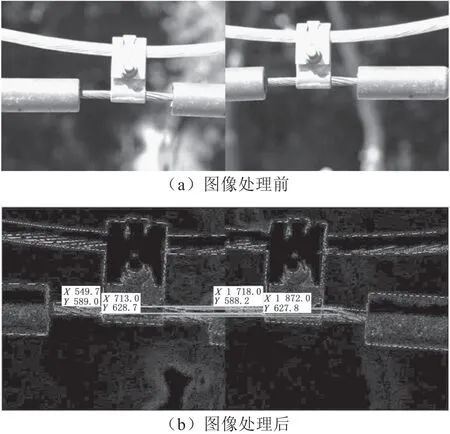
图4 第二次测量
在图像处理的结果中随机选取仅包含导线边缘的部分,根据导线边缘的像素坐标计算导线直径对应的像素距离,最后根据像素距离与实际距离的等比关系,利用特征点之间的实际距离、像素距离以及导线直径的对应的像素距离计算导线直径。表5为实验测量结果。

表4 特征点之间的实际距离和像素距离

表5 实验测量结果
3 结语
针对人工登杆测量导线直径存在效率低、风险高的现状,提出了基于双目视觉的导线直径非接触测量方法。经过实验验证,该方法可以快速高效测量导线直径,可提高效率及安全性,具有一定的应用价值。
猜你喜欢
汽车电器(2021年4期)2021-05-07
纺织科学研究(2021年1期)2021-03-19
汽车维修与保养(2020年11期)2020-06-09
汽车电器(2020年2期)2020-03-13
中南大学学报(自然科学版)(2019年6期)2019-07-20
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国惯性技术学报(2017年1期)2017-06-09
通信产业报(2016年44期)2017-03-13
电子制作(2017年23期)2017-02-02