
带内全双工水声通信空间域自干扰抵消方法
2023-01-10 03:46陆胤亨赵云江杨晨璐吴颂文
数字海洋与水下攻防 2022年6期
陆胤亨,赵云江,青 昕,*,杨晨璐,吴颂文
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001;2.海洋信息获取与安全工信部重点实验室(哈尔滨工程大学)工业和信息化部,黑龙江 哈尔滨 150001;3.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001;4.中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003;5.清江创新中心,湖北 武汉 430076)
0 引言
如何在水声通信带宽严重受限的情况下提高水声通信网络的频谱效率及系统信息吞吐量,是未来水声通信网络技术急需解决的问题。带内全双工水声通信(In-Band Full Duplex Underwater Acoustic Communication,IBFD-UWAC)技术目的在于实现通信双方同时发送、接收相同频段信号,相比于传统半双工模式,频率效率提升了1倍,且一定程度上加大了通信系统的安全性。对于带内全双工水声通信系统而言,其关键问题在于如何实现自干扰抵消(SIC),对于模拟域及数字域自干扰抵消,目前由于硬件设备限制,自干扰抵消性能存在上限[1-5]。
针对空间域自干扰抵消(Spatial Self Interference Cancellation,SSIC)学者们提出了带内全双工水声通信系统的空间域自干扰抵消方法,文献[6]所述的全双工水声通信机利用矢量水听器零点抵消特性降低了接收到的自干扰信号强度。文献[7]所述的全双工水声通信系统采用带指向性发射换能器,获得了约25 dB的干扰抵消效果。而声障板由于重量、体积等因素,在工程应用起来较为复杂,指向性换能器具有硬件依赖性,且抑制能力有限,灵活度较差,空间域自干扰抑制目的不是完美的抵消自干扰信号,而是避免期望信号埋没在量化噪声中。文献[8]提到了一种数字–空间域联合自干扰抵消方法。与大多数依靠模拟自干扰抵消的方法不同,该方法依靠数字发射波束成形来降低自干扰。该方法目的不在于完全消除自干扰,而是试图充分降低自干扰,以防止淹没接收机的动态范围。空间域抵消后,残余的自干扰随后被接收器在数字域中消除。文献[9]中提到了空间–数字域联合自干扰抵消方法,该方法采用凸优化理论完成了针对带内全双工水声通信系统的波束形成器的设计,并与数字域联合完成了多域联合抵消,与传统方法相比抵消效果具有很大提升。
针对各频率分量响应不一致的问题,早期方法是通过不同尺寸的子阵接收信号各频率数据[10],但此方法硬件结构复杂且无法做到全频带恒定束宽。后来研究者们对不同子带频点设计不同加权矢量实现这些中心频点的波束宽度恒定。主要有空间重采样法[11-12]、基于傅里叶变换的拟合方法[13-15]、Bessel 函数算法[16]等。而在 IBFD-UWAC系统实际应用中,往往需要根据阵列形状设计具有特殊响应的波束形成器[17-18],此过程主要考虑保持主瓣恒定波束响应一致且抑制具有阵列依赖性的干扰源,且干扰源来自近场,需要进行近场效应补偿。
通过上述分析得知,IBFD-UWAC系统中以往少有研究利用阵列信号处理完成自干扰抵消,且在波束形成器设计过程中,忽略了近场效应问题,即:带内全双工水声通信系统中自干扰信号通常来自于近场,若不进行近场补偿,则空域滤波达不到预期抵消效果。为进一步增加空间域自干扰抵消效果,提高SIC上限,本文对IBFD-UWAC系统的近场效应进行了补偿,并根据当前应用场景下自干扰源的位置信息,设计凸优化问题,从而得到阵列的最优权值,完成空间域自干扰抵消,并将所提出的方法在水池环境中做了实验验证。
1 基本原理
本文所述的带内全双工水声通信节点通信模型如图1所示。

图1 带内全双工水声通信节点通信模型Fig.1 Communication model of in-band full-duplex underwater acoustic communication node
波束形成技术是一种常用的干扰抵消技术,其不仅被广泛应用于无线电研究领域中,也被应用在了水声领域。本文将其应用于 IBFD-UWAC系统中,阵列接收信号后,在空间域进行波束形成,完成空间域自干扰抵消,降低接收信号的信干比(Signal Interference Ratio,SIR),图2展示当阵元数为4时,阵列全双工水声通信机的应用场景。
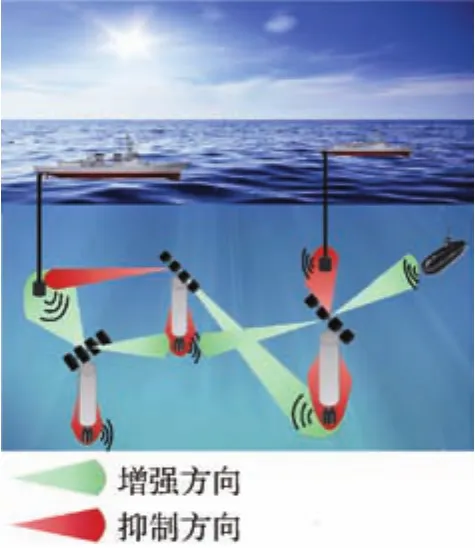
图2 水下通信领域阵列信号处理应用场景Fig.2 Application scenario of array signal processing in underwater communication field
对于水声通信系统来说,M个阵元对声波进行空间采样,在t时刻系统输出的信号y(t)为空间样本xm(t)的线性组合,即

式中:wm表示第m个阵元的权值系数;*表示复共轭。
假设输入信号是冲激复平面波ejwt,其角频率为w,到达角为θ(θ∊[-π/2,π/2]),如图3所示。假设第一个阵元接收信号相位为0,则第一个阵元接收信号为x0(t)=ejwts;第m个阵元接收信号xm-1(t)=ejw(t-τm),其中τm为波从第一个水听器到第m个水听器的传播时延,是一个关于到达角θ的函数。此时波束形成器输出为
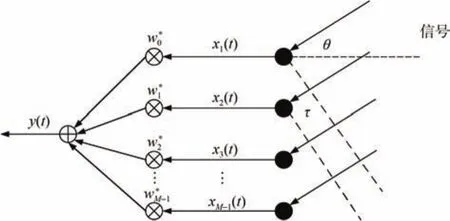
图3 远场条件下阵元接收示意图Fig.3 Schematic diagram of array element receiving under far-field condition

式中,τ0=0。
波束形成器的响应为

式中:向量w包含M个传感器的复共轭系数;H表示共轭转置,即

式中:T表示转置;向量a(w,)θ为阵列响应向量,也称为导向矢量,即

假设阵元间距d=λ/2,其中λ为波长,那么

则窄带波束形成器响应写为

值得说明的是:本文提出的SSIC方法采用频域宽带波束形成器,核心是通过傅里叶变换将数据从时域转换到频域的多个子带,每个子带满足窄带条件,上述窄带波束设计方法可以直接使用。具体使用步骤如下:首先将信号通过DFT(离散傅里叶变换),将信号转换至频域,在频域内,划分出不同频点,在每个子频带内运用窄带波束形成方法,最后将波束形成器的输出利用 IDFT(离散傅里叶变换的逆变换)至时域,图4为频域宽带波束形成的流程框图。
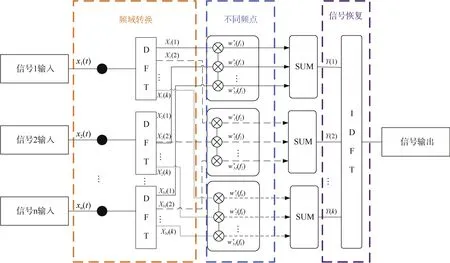
图 4 频域宽带波束形成流程Fig.4 Frequency domain broadband beamforming process
近场信号的波为球面波,接收信号间的幅度差别较大,这增加了信号处理的难度。近场在r< 2L2/λ的范围内生效,r为声源到参考阵元的距离,L为最大阵列孔径,λ为工作波长。近场中可以分为窄带和宽带2种模型讨论。而在带内全双工水下通信系统中,通常采用宽带信号通信。故本文中的近场信号为宽带信号。
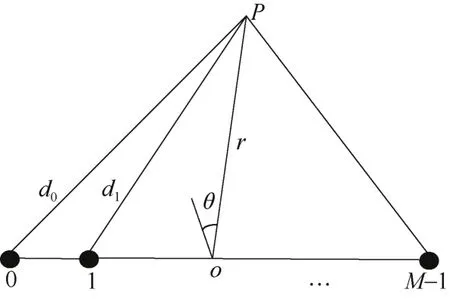
图 5 近场条件下阵元接收示意图Fig.5 Schematic diagram of array element receiving under near-field condition
本文在文献[9]基础之上设计了一个近场条件下的恒定束宽波束形成器,该波束形成器可以针对具有方向与阵型依赖的干扰来源方向形成“零陷”,同时保持主瓣的波束响应频率不变性,并通过凸优化方程补偿近场效应。本文设计的空间域自干扰抵消方法针对 IBFD-UWAC中阵列依赖的本地干扰源,利用凸优化方法抵消阵列依赖的近场干扰方位的SI信号。
本文基于文献[9],具体凸优化过程设计如下:
2)将上述设计的波束形成器中心频率处的主瓣响应作为凸优化过程的期望响应pdesired(θ),并使优化后的波束形成器响应pMF(θ)在带有pdesired(θ)的主瓣角度区间θMF(θ)中的双参数响应最小。
3)利用凸优化理论,将侧摆角区间θSF内的波束响应pSF(θ)约束在设定值ξSF以下,将零陷区间θZF内的波束响应pZF(θ)约束在设定值ξZF以下。为获得更好的自干扰抵消效果,修改了凸优化方程,即在保证主瓣设计波束与期望波束加权误差小于某期望值的条件下,使得零陷角度波束响应最低。
4)使用IFFT还原信号,得到SSIC后的信号。
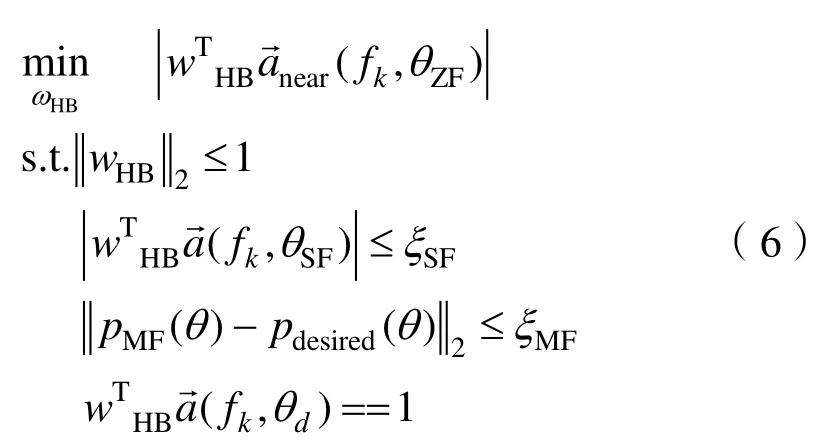
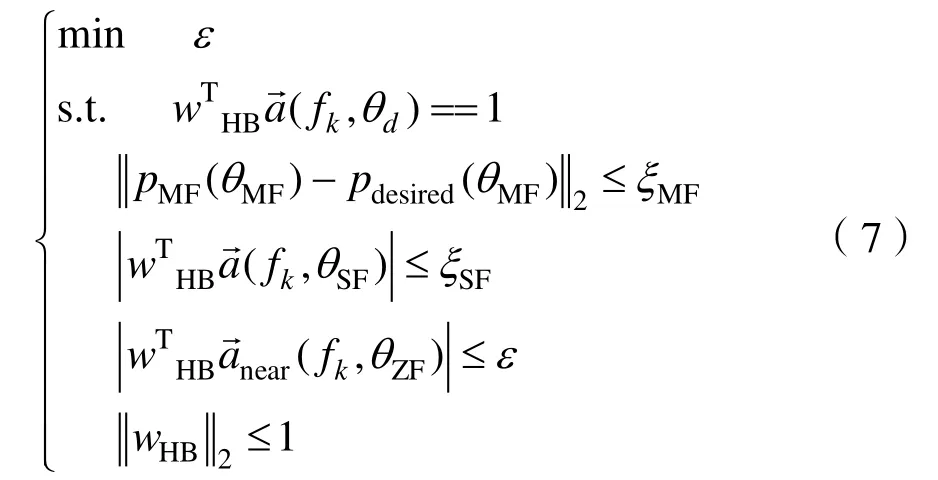
综合上述步骤,本文构造了凸优化方程:
为便于利用 SeDuMi计算,本文将式(7)变换为:
其中引入一组新的非负变量,εm,m=1,2,…,M,
令

求解在每个频点下地最优权值向量,即每个阵元的加权系数。
由于在SeDuMi中,标准的凸锥问题形式定义为
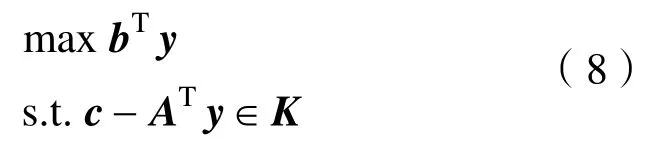
式中:y中含有期望权值;A是任意系数矩阵;b和c是任意向量;K是一个对称锥集合;其中A,b,c的维数是匹配的;q维二阶锥定义为

等式约束可以表示为

最后问题转换成:

式(12)可以利用SeDuMi工具箱进行分段求解,因此本文将式(8)转换为q1个等式约束,q2个线性约束和q3个二阶锥。
式(8)中的第一项等式

式(8)中的不等式可用二阶锥表示为
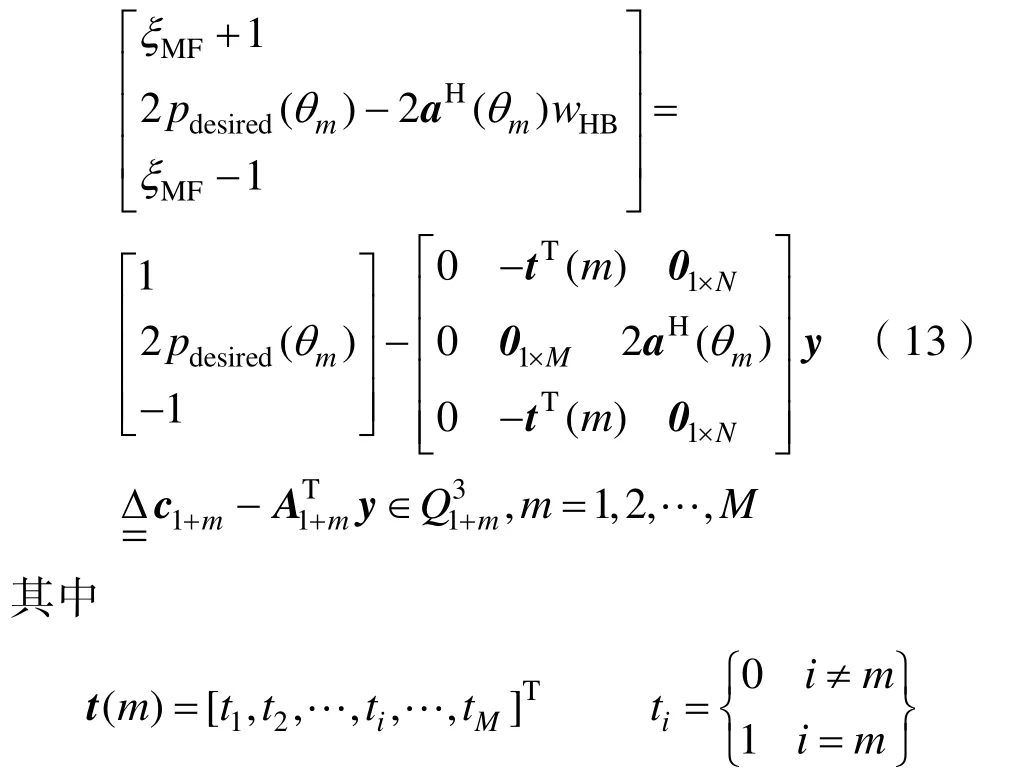
为方便计算,式(8)中最后3个不等式转换为式(15)–(17)。
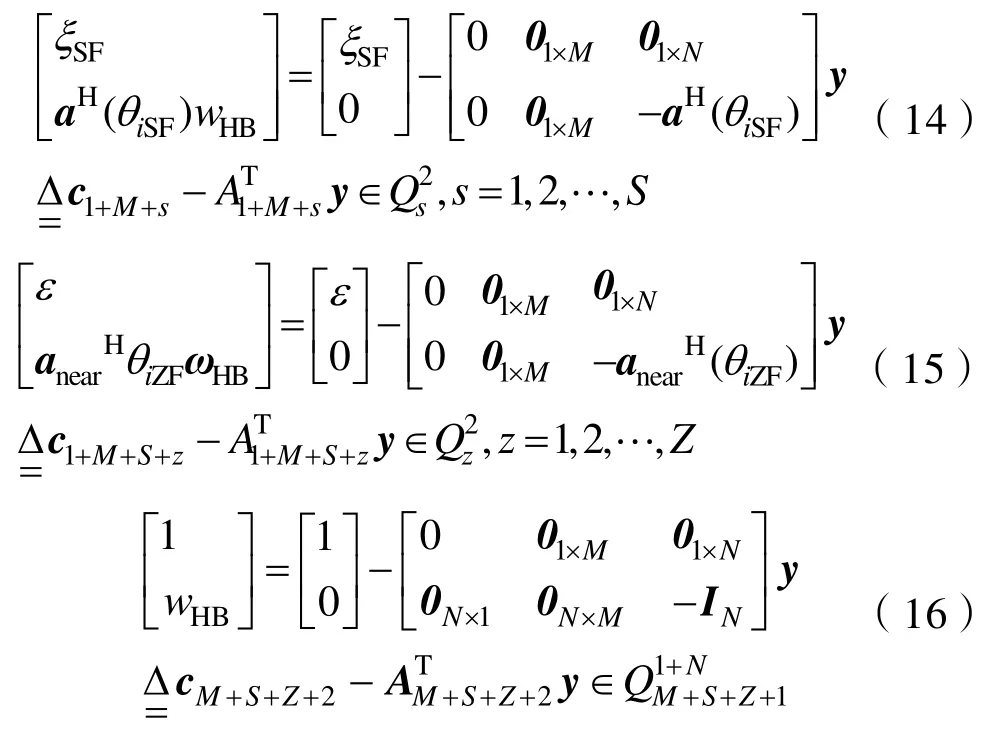
式中,IN是N维单位向量。
令

和ci,Ai(i=1,2,…,M+S+Z+2)由式(13)–(17)给出,则最后转换为标准的二阶锥问题

求解y得到其最优解,取第M+2~M+1+N个值即为所求阵列最优权值wHB。
2 仿真及实验
在以下的仿真与实验中,上述凸优化问题中的参数设置为:θMF=[-5◦,5◦],θSF=[-90◦,-8◦]∪[8◦,90◦],θZF=[65◦,75◦],仿真中,ξSF=10-15/20,ξZF=10-60/20,θd=0◦为期望信号来源方向。
文献[9]中远场条件下的波束响应如图6所示,近场条件下的波束响应如图7所示。

图6 远场条件下文献[10]中算法的波束响应Fig.6 Beam response of algorithm in Reference [10]under far-field condition

图 7 近场条件下文献[10]中算法的波束响应Fig.7 Beam response of algorithm in Reference [10]under near-field condition
从图 6及图 7可以看出,文献[9]中提到的方法在近场条件下,并没有产生零陷的效果,而工程应用中通常情况下,本地自干扰源在近场范围中,因此本文修改了凸优化方程中的导向矢量,引入向量,完成了近场补偿后的波束形成器的设计。
本文经过近场补偿后的远场波束响应如图 8所示,近场波束响应如图9所示。
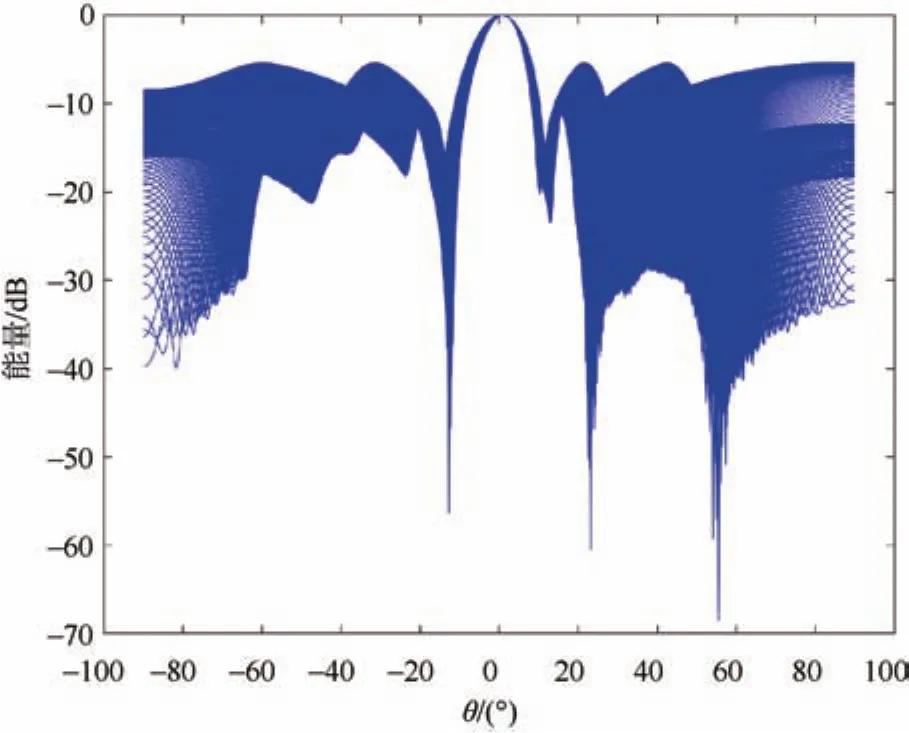
图8 远场条件下本文算法的波束响应Fig.8 Beam response of algorithm under far-field condition

图9 近场条件下本文算法的波束响应Fig.9 Beam response of algorithm under near-field condition
从图8、图9中可以看出,经过近场补偿后的波束形成器能够在远场范围处指向期望信号,并能够在近场范围中精准地抑制自干扰信号。为进一步证明本文方法的有效性,本文进行了水池实验,实验场景如图10所示。

图10 消声水池实验环境Fig.10 Experimental environment of anechoic pool
图 11展示的是在无自干扰的情况下,用标准DOA估计方法估计的期望信号的方向,以便确定凸优化方程。图12展示的是经过文献[9]与本文方法的SSIC后残余自干扰信号频谱对比。
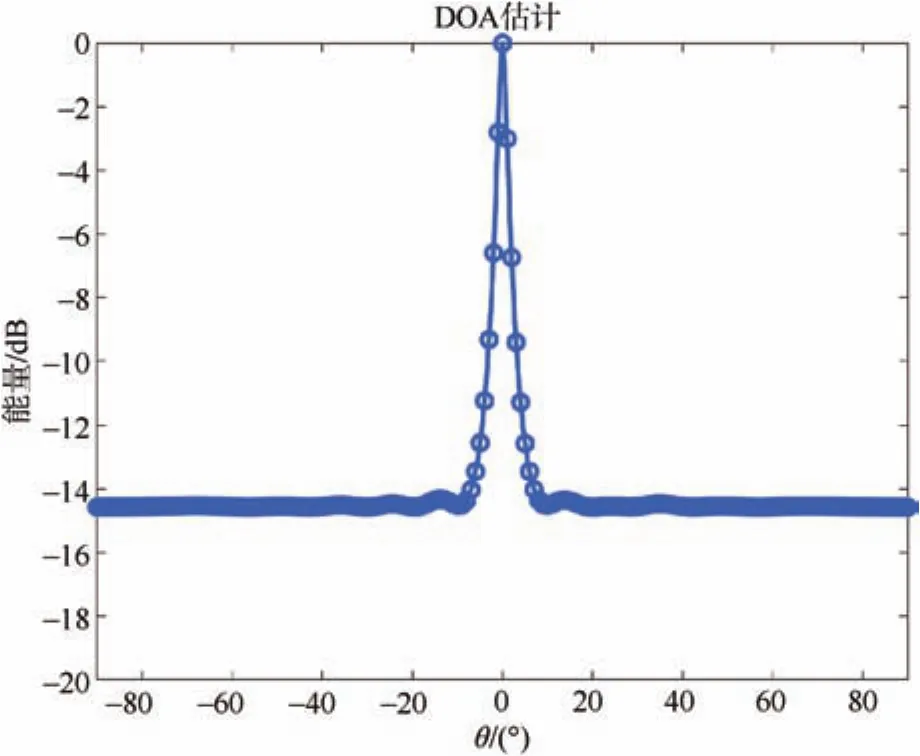
图11 信道响应Fig.11 Channel response

图12 经过文献[9]与本文方法的SSIC后残余自干扰信号频谱对比Fig.12 Spectrum comparison of residual self-interference signal after SSIC in Reference [9] and this method
从图12可以看出,本文提出的SSIC方法相比于文献[9]有着更好的SSIC效果,SSIC效果提升了9.8 dB并提升了IBFFD-UWAC系统总体SIC水平。
3 结束语
本文基于近场补偿模型与已有研究结果,对近场条件下的带内全双工水声通信系统的空间域自干扰抵消进行了仿真与分析,仿真结果表明近场效应对自干扰信号会有影响,导致SSIC效果未达到最优。本文提出的SSIC算法能够解决近场效应带来的问题。通过引入近场导向矢量并修改凸优化方程,完成了最优波束形成器的设计,获得了更高的SSIC抵消效果,提高了IBFD-UWAC系统SIC上限,为后续空间域自干扰抵消提供理论基础以及实验基础。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
计算技术与自动化(2022年2期)2022-07-04
海军航空大学学报(2021年1期)2021-09-01
湖南大学学报·自然科学版(2021年6期)2021-08-02
通信电源技术(2020年22期)2020-03-27
大经贸(2017年8期)2017-09-26
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
中兴通讯技术(2016年3期)2016-06-22
