
OTFS水声通信技术研究现状与展望
2023-01-10 03:46林静怡孙宗鑫刘宇飞
数字海洋与水下攻防 2022年6期
林静怡,孙宗鑫,刘宇飞
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001;2.海洋信息获取与安全工信部重点实验室(哈尔滨工程大学)工业和信息化部,黑龙江 哈尔滨 150001;3.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
0 引言
声波是目前水下唯一有效的远程信息传输载体,水下声(Under Water Acoustic,UWA)信道面临着诸多挑战,如通频带有限、较大的时延拓展、频率选择性衰落、易受多普勒效应影响等[1]。
正交频分复用(Orthogonal Frequency Division Multiplex,OFDM)是一种多载波调制技术,其中多路复用的子载波频率彼此正交。由于正交性,每个子载波的峰值将与其他子载波的零值重合。因此,即使各子载波在频谱上彼此间存在部分重叠,在所需子载波的峰值处也不会受到其他子载波的干扰。同时,OFDM系统避免了使用非正交载波集的系统中普遍存在的带宽效率损失。与早期系统相比,极大地提高了UWA通信系统的频谱效率。由于OFDM调制及解调的实现复杂度较低,因此在高速率UWA通信系统中得到了较为广泛的应用[2-3]。
然而,时变信道会破坏子载波之间的正交性,从而产生载波间干扰(Inter-Carrier Interference,ICI),ICI极大地降低了OFDM的性能。现有的方法是缩短 OFDM的符号持续时间,减轻每个符号上的信道变化。然而,这一方法的主要缺点是由于符号持续时间和循环前缀(Cyclic Prefix,CP)的缩短导致了频谱效率的降低[4]。所以,如何在高多普勒、高时延的水声信道下提高水声通信网络的频谱效率是未来水声通信技术的主要研究方向之一。
OTFS调制是2015年由Hadani 等人[5]提出的一种用于改善并解决高速移动通信系统中受到严重多普勒效应及信道影响的方案。不同于传统OFDM 调制的时频(Time-Frequency,TF)域,OTFS在延迟多普勒(DELAY-DOppler,DD)域调制信息。DD域具有较强的时延容限和多普勒容限,同时具有全分集的潜力,这是支持可靠通信的关键之一。此外,OTFS调制可以在DD域中将一个时变衰落信道转换为一个非衰落且时间无关的信道,使得其中所有调制符号的信道增益基本上是恒定的[5]。我们可以将OTFS看作另一种多载波调制方案,或者说可以将OTFS视为应用于QAM符号的二维扩频,然后使用OFDM或其他多载波调制方案,如广义频分复用(Generalized Frequency Division Multiplexing,GFDM)进行调制。将OTFS技术应用于UWA通信,可以弥补OFDM技术在复杂快时变水声信道条件下系统性能显著下降的缺陷。鉴于大多数现有的水声通信系统设计都是为低移动性和低载波频率场景设计的,OTFS技术为发射及接收机架构和算法设计方面带来了新的挑战。为了充分释放 OTFS技术的潜力,必须解决一系列问题,包括波形设计、信道估计、检测以及多天线和多用户设计等。
目前,针对OTFS调制技术方面的研究主要集中在无线电通信领域,且尚处于研究的初始阶段。此外,OTFS调制技术在 UWA 通信领域的研究目前较少[6],但已经有部分学者通过将无线通信中的研究结果在水声通信中展开了适用性研究并取得了一定成果。其中,主要集中于降低接收机复杂度、信道估计以及信号检测等方面,具体形式以仿真分析及外场试验为主,还未进行工程上的实现与应用。
本文的结构如下:第1部分对OTFS技术以及OTFS-UWA 通信系统研究现状进行介绍;第2部分对OTFS-UWA中的重点研究方向,包括波形设计、信道估计和均衡方法、不同的OTFS水声通信方案、OTFS接收机设计;第3部分为对OTFS-UWA通信技术的展望。
1 OTFS-UWA技术研究现状
目前UWA通信网络中广泛使用的OFDM调制技术容易受到多普勒扩展的影响,从而导致系统性能的严重下降。如何在复杂多变的移动UWA通信场景下,实现高效的数据传输,是目前需要解决的关键问题。
2016年,HADANI等人首次提出了一种新型的二维调制技术,称为正交时频空调制,简称OTFS[5]。OTFS的调制解调如图1所示。调制符号首先被映射到DD域,并通过逆辛–有限傅里叶变换(INVERSE SYMPLECTIC FINITE FOURIER TRANSFORM,ISFFT)和Heisenberg变换进行正交二维预编码,将DD域信号转化到TF域。然后在每个时隙使用多载波调制器,如OFDM或滤波器组多载波(Filter Bank Multicarrier,FBMC),进一步将 TF域信号转化为时域信号,然后通过水声信道进行传输。在接收端,采用多载波解调和二维正交解码的级联组合将接收到的信号转换至DD域,并使用合适的信道估计器和均衡器在DD域中完成对发送符号的解调。
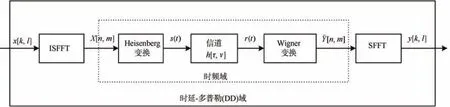
图1 OTFS水声通信系统框图。Fig.1 Blcok diagram of OTFS underwater acoustic communicaiton system
与OFDM不同,OTFS中的用户数据(星座符号)被转化到DD域中,使用ISFFT将数据放置在TF网格中。在调制阶段,添加CP或CP块以避免信道时延扩展对解调过程造成的影响。从而将衰落、时变信道转换为非衰落且与时间无关的信道。在该方案中,所有QAM符号经历相同的信道,并且信道中所有延迟多普勒分集分支也被相干地组合。
该方案有以下几种优势:1)OTFS可在复杂信道条件下实现较为稳定的数据交互,这在高速系统中尤其重要;2)在相同信噪比条件下,OTFS调制技术具有更优的容错能力;3)短包传输模式下,OTFS技术可显著降低峰值平均功率比(Peak to Average Power Ratio,PAPR);4)在对接收机的复杂度要求有限时,可提升多输入多输出(Multiple-Input Multiple-Output,MIMO)系统的容量[5]。
近年来,研究人员在原有的OTFS调制方案的基础上开展了诸多改进型研究。Raviteja等人开发了OTFS信号的数学框架[4],推导出了OTFS在DD域的调制解调的输入输出方程。文献[5]建立了时延小于τmax和多普勒频移范围 (vmin,vmax)的多路双色散信道上的OTFS调制模型。由于原始的OTFS输入–输出关系假设理想的脉冲整形波形在时间和频率上都是双正交的,根据Heisenberg不确定性原理,双正交的理想波形是无法实现的[5]。所以,文献[7]将 DD域的输入–输出关系作为基础,推导出实际脉冲整形波形的输入–输出关系,然后将其推广到任意波形。在文献[4]中,当使用消息传递(Message Passing,MP)算法进行符号检测时,可使 OTFS实现比OFDM更低的符号错误概率(Symbol Error Probability,SEP)。在此基础上,文献[7]提出只在OTFS帧的末尾添加了一个CP的方案,该方案可以显著降低因脉冲整形波形双正交性损失而产生的开销。文献[8]提出了利用嵌入式导频符号进行信道估计的方法。研究结果表明,在误差性能上,具有非理想信道估计的 OTFS优于具有理想信道估计的OFDM。由于DD域的信道估计是利用DD域的稀疏特性实现的,文献[9]–[11]对 OTFS系统中DD域的稀疏性进行了研究。
在水声通信研究领域,厦门大学提出了一种基于 OTFS的单输入单输出(Single Input-Single Output,SISO)水声通信方案[12]。从误码率(Bit Error Rate,BER)、频谱效率以及PAPR共3个方面比较了OTFS以及OFDM在水声信道环境下的仿真结果。结果表明,基于OTFS的UWA通信方案在时变多径水声信道中的性能优于 OFDM 和DFTs- OFDM方案。2019年11月,英国布里斯托大学的 BOCUS等人提出了一种基于大规模MIMO-OFDM的 OTFS系统来研究多用户水声通信方案[13]。文献[12]和[13]中,分别研究了 SISO和MIMO场景下的OTFS-UWA通信。仿真结果表明,OTFS的性能均优于OFDM。然而,在这2项工作中,都以接收端已知准确的信道信息为假设前提。大连理工大学的研究人员提出了一种具有自适应信道估计的时间反转OTFS接收机[14],分别在模拟信道和实测信道下进行了系统性能的评估。研究结果表明,采用所提出的二维被动时间反转(Passive Time Reversal,PTR)接收机在较低复杂度的情况下能够获得较好的系统性能。
由于水声通信信道与无线电信道特征差异较大,本文将进一步讨论OTFS技术在水声通信领域中的几个重点研究方向。
2 OTFS-UWA中的重点研究方向
2.1 波形设计
文献[5]中给出了OTFS的系统流程及描述,但未提供确切的实现方法及细节。部分研究工作假定OTFS系统脉冲波形在时间和频率上都满足正交条件,但由于Heisenberg不确定性原理的限制,在实际中难以实现。因此,研究OTFS实际脉冲整形波形的输入–输出关系是十分重要的。由图1可知,OTFS调制解调系统可以在传统 OFDM 架构的基础上增加一些预处理和后处理来实现[15]。因此,OTFS 中可以采用和 OFDM一样的矩形波形,其优点是易于实现,但缺点是将带来较高带外能量泄漏导致邻道干扰,可采用频率局部脉冲整形[16]及时域加窗技术[17]进行带外泄漏衰减优化。文献[4]中,分析了满足双正交条件的理想脉冲整形波形和不满足双正交条件的矩形波形,前者只存在多普勒间干扰(Inter-Doppler Interference,IDI),后者则还附加了ICI和符号间干扰(Inter-Symbol Interference,ISI)。因此,在符号检测前需要先对上述的干扰项进行分析。通过适当的相移可以消除 ICI和 ISI的干扰,通过MP算法并且只考虑最大的IDI干扰项,可以适当地缓解IDI的干扰。MP算法可以有效地对大范围的多普勒频偏进行补偿,具有低复杂度、高效等特征,使得OTFS系统使用实际矩形波形也可以达到近似理想脉冲整形波形的性能。
实际脉冲整形波形的输入–输出关系还可以推广到其他波形。对于椭圆球面波形,它的带外泄漏比矩形波形低得多,应用于OFDM系统当中时可降低系统的带外干扰。由于信号和噪声分量的比例相同,因此任意的发射波形并不影响最大似然(Maximum Likelihood,ML)检测的性能。通过综合考虑,可在实际应用中选择更具兼容性的矩形波形。
文献[7]中比较了矩形和椭圆球面波整形下的OTFS系统性能。结果表明,采用矩形波时的整体性能比椭圆球面波高出约 5 dB。这是由于后者结构中的一些边缘符号存在较低的通道增益,从而对整体性能造成了影响,而矩形波的所有符号具有均匀的通道增益。因此,我们可以得到OTFS系统的带外功率和误码性能之间的权衡关系。然而,使用椭圆球面波函数进行脉冲波形设计的 OTFS仍然能够在分集增益(BER曲线斜率)方面优于OFDM系统。
2.2 信道估计和均衡
在高移动性环境中,信道将在短时间内剧烈波动。准确估计OTFS系统的信道冲激响应(Channel Impulse Response,CIR)对于解调过程来讲是至关重要的。由于DD域信道的稀疏性和准平稳性,DD域的信道估计比TF域的复杂度更低[15]。然而,DD域的信道可能并不总是满足稀疏性的[18],因为OTFS的信道估计过程在现实应用中面临着多普勒效应。若帧长足够长,多普勒频移的分辨率足够高,则每个传输符号将会经历相同且缓慢变化的信道增益,此时不存在分数多普勒弥散问题。然而,在实际应用中帧长有限,由此带来的分数多普勒频移不可忽略。一般地,OTFS系统的信道估计方法是获取导频信号在DD域的信道冲击响应[19],但该方法只能获取DD域中索引为整数的信道冲击响应,因此可以通过提高多普勒域的分辨率减轻 IDI效应。由于分数多普勒频移不能直接从接收的导频中获得,因此IDI被视为是不可避免的。文献[20]提出一种基于伪噪声(Pseudo-Noise,PN)序列的信道估计方法来估计每条路径的多普勒频移,但若要精确估计分数部分,将会造成较大的系统开销。文献[21]提出了一种利用DD域导频响应处理分数多普勒信号的信道估计方法,并利用估计出的信道信息提出了一种OTFS低复杂度信道均衡方法。
OTFS信道估计需要对导频符号进行设计,文献[8]提出了一种将导频符号嵌入在数据帧中的方法来进行信道估计。通过使用带有若干保护零符号的导频,将其嵌入包含信息符号的延迟多普勒网格上。不同的符号位置配置取决于信道有整数或是分数多普勒路径。该文探究了导频符号、保护间隔、传输符号的不同占比以及不同信噪比下 OTFS系统的性能。结果表明,采用嵌入式导频符号进行信道估计可以达到与理想信道估计相似的性能。同时,这种方法可以使得非理想信道估计的OTFS系统性能仍然优于理想信道估计下的 OFDM系统性能。2021年,埃朗根纽伦堡大学根据信道在 DD域的稀疏性,提出了一种新的导频模式和一种基于稀疏贝叶斯学习的信道估计算法,数值仿真结果表明,该算法在导频开销、导频功耗和抗噪声干扰方面具有优越性[10]。
在MIMO系统中,OTFS为其增加了更大的可开发自由度,相对于TF域信道在不同时隙和子载波的不同声源处可能会出现动态波动,DD域信道在时间域和空间域上都趋于准平稳,这可以实现高效的信道估计和MIMO检测。
2019年5月,北京理工大学提出了一种基于三维结构化正交匹配追踪算法的信道估计方法,来解决OTFS大规模MIMO下行链路信道估计问题[11]。仿真结果表明,该算法能够以较低的导频开销获取准确的信道状态信息。2020年,西安电子科技大学提出一种用于高移动性大规模MIMO-OTFS 网络基于上行链路辅助的下行链路信道估计方案。在快速贝叶斯推理的帮助下,提出了一种低复杂度的方法来克服期望最大化的变分贝叶斯瓶颈。仿真结果表明,所提出的策略是有效的且具有较强鲁棒性[22]。
2.3 SISO-OTFS及MIMO-OTFS
对于水声信道中的信号干扰问题,研究人员对于UWA信道估计和多普勒补偿方法已经进行了广泛的研究和研究[23-26]。通常使用循环前缀或导频符号来研究和估计多普勒频移,从而获得信道特性的近似值,以牺牲数据开销和频谱效率来平衡影响。文献[23]和[24]中提出了更精确的多普勒位移估计和补偿方法,同时假设该方法能够很好地处理ICI问题。对称保护间隔迭代估计多普勒频移,虽然可以提高估计精度,但计算量和导频开销较大。OTFS调制方案具有对抗高多普勒的优势,同时可以提高通信性能,结合水声时变多径信道,OTFS-UWA是一个值得研究的方向。应用系统可主要分为SISO以及MIMO-OTFS。
厦门大学提出了一种基于OTFS的SISO水声通信方案[12]并在 3种水声信道环境下进行理论仿真。通信系统基本参数设置为:海深100 m,发射深度20 m,接收深度50 m,频段10~15 kHz,其中三种信道模型多普勒因子分别为 10-5,10-4,10-3,通信距离分别为1 km,1 km,1.3 km。比较了OTFS与OFDM和在这3种不同通信场景下的误码性能。仿真结果表明,当信噪比为10 dB时,OTFS系统的性能优于OFDM,BER可达到 10-5量级。对于DD域的M×N个符号,其中M为时延网格数,N为多普勒网格数,OTFS可以将其扩展到整个带宽和持续时间,实现全时频分集。当多普勒因子为 10-3且SNR为30 dB时,OFDM系统的BER量级达到 10-2左右。此外,还分析了不同CP添加方法下的频谱效率和不同帧长下的 PAPR性能,并验证了OTFS在BER性能和PAPR之间的权衡。结果表明,基于OTFS的UWA通信方案在时变多径水声信道中的性能优于OFDM方案。
在海洋勘探和环境监测中,常需将大量水下数据从水下航行器传输到水面站[27],如视频信息等,但因带宽在远程声链路上受到严重限制,使得这种需求对目前的UWA通信系统而言是一项艰巨的任务。因此,MIMO-OFDM 通信系统被认为可以应用于带宽受限的水声通信场景中,来提高可靠性和比特率[13]。英国布里斯托大学的BOCUS等人给出了基于多用户大规模MIMO-OFDM的OTFS系统的数学公式。此外,在模拟的1 km垂直配置的UWA通信系统中,根据 BER和最大可实现比特率对MIMO-OTFS系统的性能进行了评估。仿真场景由接收阵列及移动平台构成,其中基站接收阵列由100个水听器组成,可连接到水面船只或石油平台。4个遥控水下航行器(remotely operated underwater vehicle,ROV)部署在不同的深度和距离,每一个都配有2~4个发射传感器。ROV在上行链路同时将数据传输到水面船只,而基站则将控制信息传输到下行链路的每个ROV。仿真中的参数设置如下:声速为1 500 m/s,带宽为25 kHz,载波频率32.5 kHz,水深1 000 m,接收深度为998 m,发射深度分别为1.8 m,1 m,1.5 m,0.5 m。仿真结果表明,在动态 UWA通信中采用 OTFS 调制的通信系统性能优于使用传统 OFDM 调制的通信系统。并在大规模 MIMO 系统中,更大的调制阶数可进一步提高带宽利用率,因为基站的多个水听器上接收到的信号线性组合可以平滑子载波上的信道失真,从而均衡每个子载波上的信道增益。但是对于OTFS技术来说,随着发射传感器数量的增加,BER亦会增加。
2.4 接收机研究
在OTFS通信系统中,发送的信息符号在DD域产生,接收信号可被认为是由发送信号与DD域信道进行二维卷积而得[21]。OTFS接收机设计在一定程度上对系统性能起到了决定性作用。常见的非线性接收机是MP接收机,其具有接近ML的性能但复杂度较高且灵活性较差,可以从平衡接收机的复杂度和性能的角度进行深入研究[28],如基于最大似然比合并的 Rake 迭代接收机[29]和变分贝叶斯接收机[30]等。
而OTFS 中的线性接收机可分为 DD 域线性接收机和时频域线性接收机2类。DD 域接收机的性能相比于 TF域更好,但复杂度更高。文献[31]提出了一种低复杂度线性接收机,其中采用低复杂度的最小均方误差(Minimum Mean Square Error,MMSE)和迫零(Zero-Forcing,ZF)均衡器,不同于传统均衡器中使用的反演方法,该方案可以在较低复杂度下为局部搜索技术提供精确的 MMSE和 ZF初始解,从而提高系统的性能。在文献[12]–[13]中,分别研究了SISO和MIMO场景下的OTFS- UWA通信。在这2种应用场景中,接收机处都假定有完美的信道信息。对于实际通信场景下的OTFS系统,并未给出相关结论。针对这个问题,大连理工大学的研究人员提出了一种具有自适应信道估计能力的时间反转OTFS接收机[14],在统计仿真信道和实测信道下评估性能。根据文献[32]可知,实验在深度为20 m的水域中进行,海面条件相对平静。环境声速几乎恒定。发射深度为19 m。接收有6个水听器,深度为17.2~19.2 m。通信距离为5 km。载波中心频率为17 kHz,带宽为4 kHz。最大延迟扩展约为 5 ms。测量结果表明,提出的接收机可以在较低的复杂度下具有较低的 BER。同时,无论在仿真信道还是实测信道中,所提出的OTFS方案的性能都优于OFDM方案。与现有方法相比,所提出的接收机可以以较低的复杂度实现MP接收机相似的性能。
3 OTFS-UWA通信技术展望
综上,在OTFS水声通信技术目前的研究中,主要方向为波形设计、信道估计和均衡、SISO、MIMO、接收机设计等。作为一种新兴的波形,OTFS调制展现了新的机遇与挑战。在水声信道下的技术研究与应用探索还面临诸多难点问题:
1)OTFS的调制解调过程中包含了传统的时频域调制,从公开文献中可知,通过增加一些预处理和后处理模块,可使OTFS技术在传统OFDM体系结构的基础上实现,这降低了 OTFS技术在水声通信领域应用的难度。然而,作为一种块调制方案,OTFS系统比传统的OFDM系统有更高的延迟[15]。因此,要在兼容现有OFDM技术的同时,需要尽可能的保持其灵活性和固有优势,在性能和复杂度之间取得平衡。
2)在OTFS系统的设计准则中,当M和N较大时,上述方法具有较高的复杂性。对于OTFS-UWA通信系统,由于M需要大于最大时延扩展,而UWA通信中的时延扩展远远大于无线通信。因此,将导致 UWA通信中 OTFS接收机设计复杂度相比无线OTFS接收机更高。传统的 OTFS接收机如 MP、MMSE等计算复杂度高,难以在实际应用中实现。
3)OTFS可以实现高效的信道估计和MIMO检测,但目前OTFS与MIMO结合的方案中,都未能充分利用发挥MIMO的优势。如何设计波束形成过程、预编码以充分利用所有可用的空间自由度,以及如何对 MIMO-OTFS进行低复杂度检测,是值得探索问题。此外,MIMO-OTFS系统性能与收发机数量关系的分析还未在公开发表文献中见到。
4)在目前对于 OTFS接收机的研究中,大多数都是假定接收端都有完美的信道信息。水声信道是一个十分复杂的时–空–频变信道,在常见的海洋环境中,水声信号传播过程中存在多径效应、多普勒效应以及环境噪声的影响,导致通信系统接收端在信号检测时无法正确获取信道信息,这对通信系统的设计带来了很大的阻碍。同时信道中的相位起伏使得接收端的载波恢复和相干解调变得十分困难。因此,基于水声信道的 OTFS系统研究相关的接收端信道估计和信号检测方法是一个极具应用价值的研究方向。
5)目前已公开文献在对比水声 OFDM 调制与OTFS调制通信系统方案时,仅考虑了可靠传输下接收端 BER的仿真与结果分析。但是在水声通信系统中,除了比较关键的系统可靠性指标以外,还需要考虑通信系统的数据传输容量以及系统设备复杂度及计算量。所以,相较于传统的水声OFDM通信系统设计方案,如何降低在水声信道中应用 OTFS调制技术的计算复杂度和部署实施时的设备复杂度是另外一个具有实际应用价值的研究课题。
4 结束语
本文首先概述了OTFS的研究现状,包括无线电通信领域及水声通信领域的 OTFS技术研究进展。指出了OTFS-UWA中的关键技术,如波形设计、信道估计和MIMO-OTFS,并提供了相关的研究结果。最后,本文介绍了OTFS技术在水声信道下应用时面对的挑战以及对未来的展望。
作为一种新的调制方式,OTFS技术所展示出的潜力使其值得被进一步的研究,以提升水声通信系统性能。尽管目前已经有一些文献涉及到了 OTFS在UWA通信中的应用,但数量较少且方向单一。如何将 OTFS技术在无线电通信领域的性能优势体现在水声通信中,是需要进一步进行研究的问题。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
中国惯性技术学报(2020年2期)2020-07-24
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
中国惯性技术学报(2019年6期)2019-03-04
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
