介电弹性体智能材料的应用
2023-01-09 09:37:14程文露曹江勇刘洪福王福京刘金朋
弹性体 2022年5期
程文露,曹江勇,刘洪福,王福京,刘金朋
(青岛博锐智远减振科技有限公司,山东 青岛 266114)
如今,多数的驱动器工程设备是由金属塑料等硬材料开发设计的,由于其高的输出功率、高精确度和良好的可控性一直是驱动器主流发展方向。这些驱动器在转化为动能时,往往存在热、光、声等其他能量形式出现,有时会影响驱动器的使用条件,所以越来越需要软体仿生机器人适应各种可能出现的未知情况。20年前,Ron等[1]89-93引入新型的软体驱动器,被称为介电弹性体驱动器,它是由超弹性薄膜两侧涂覆柔性电极材料制成的。目前可用的介电弹性体基体材料包括丙烯酸酯、聚氨酯、硅橡胶、亚乙烯基氟化三氟乙烯、丁腈橡胶和相应的复合材料[2]。其工作原理是介电弹性体在电场作用下产生麦克斯韦应力,使薄膜在厚度方向压缩而产生平面方向的伸展,由此电能转化为机械能,开启了介电弹性体应用在驱动器的新征程,其工作原理如图1所示。
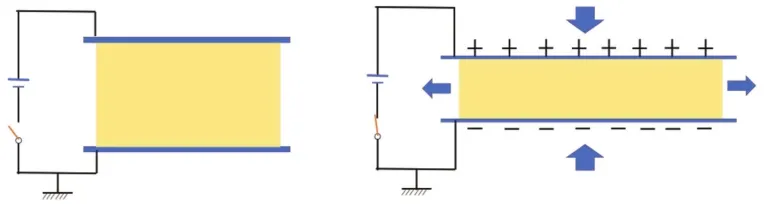
图1 介电弹性体驱动器驱动原理图
介电弹性体不仅能用做驱动器,还能在可变阻尼装置、能量收集器和柔性传感器等领域找到应用。介电弹性体发生形变的过程中,弹性体本身的刚度和阻尼也会随形变产生规律的变化,这种特性赋予介电弹性体具有制造可变刚度或可变阻尼设备的潜力,如消音减振器[3]。介电弹性体此类电能转化为机械能的过程是可逆的,即机械能向电能的转化,实现能量收集,如海浪发电机[4]。从结构上看,介电弹性体本身还属于一种平板电容器,当外力作用在介电弹性体上时,介电弹性体产生包括厚度、长度和外形的变化,导致弹性体两侧柔性电极的存储电荷的能力相应的升高或降低,即电容产生了改变,此时的介电弹性体被当做平板电容传感器使用[5]。
1 介电弹性体主要基体简介
介电弹性体基体材料多种多样,包括硅橡胶、硅树脂、丙烯酸酯、聚氨酯、丁腈橡胶、天然橡胶、亚乙烯基氟化三氟乙烯及其相应的复合材料等,其中应用最广泛的有三类:硅橡胶、丙烯酸酯和聚氨酯。
硅橡胶应变响应速度快、应用范围广、生物兼容性好,是目前研究最多的介电弹性体基体。但硅橡胶的节点常数比较低,弹性模量也比较小,因此需要添加高介电常数填料或与其它材料复合改善节点常数,同时需要高的驱动电压,因此需要许多研究者以此为研究重点进行改性已克服这些缺点,如包含烷基氯官能的硅氧烷共聚物介电弹性体的介电常数比纯基体提高了40%。
聚氨酯具有较高的极性,从而具有较大的节点常数和电击穿电压,故可以产生较大的形变。因为聚氨酯是嵌段共聚物,材料可设计性极强,可以通过软硬段配合,改变其模量,影响其在电场下的变形表现。1994年,Ma等[6]首次将聚氨酯应用到介电弹性体领域。后来研究人员不断在聚氨酯材料软硬段改性、软硬段结构以及填料改性等多个方面改进型聚氨酯介电材料的各项性能。例如Xiang等[7]将羟基封端的丁二烯-丙烯腈共聚物(HTBN)作为软链断,六亚甲基二异氰酸酯(HDI)和丁二醇(BDO)作为硬段合成了具有高介电性能聚氨酯介电弹性体。其介电常数大于8.7,而损耗因子小于0.02,电击穿强度和杨氏模量都随着硬段含量的增加而增加。
丙烯酸酯橡胶具有电致变形大、电击穿强度高的优异性能,但其具有介电常数较低(约为4.7)、热稳定性低、对环境敏感(温敏性、湿敏性)以及高黏弹性等特性,造成电响应时间长,且重现性差,最终限制了机电偶合效率,降低了丙烯酸酯橡胶的应用范围。目前较常用的丙烯酸酯薄膜是出自美国3M公司的VHB系列,他们是由包含乙烯基和羧酸羧酸端基脂肪族丙烯酸酯的混合物组成的。这类丙烯酸酯拥有比较高的介电常数,在103 Hz时介电常数能达到4.8,此外其理论能量密度为3.4 MJ/m3。
2 介电弹性体在柔性机器人领域应用
介电弹性体驱动器相对于传统驱动器而言,拥有质量更轻、形变更大、响应速度更快、噪声更小以及滞后损失更小的优点。介电弹性体的各种特性与生物组织相似,是人造肌肉理想的原材料。不同于传统机器人,软体机器人满足机动性和续航能力的同时,拥有更好的隐身性能,而且还能更加适应复杂、极限和恶劣环境。
介电弹性体驱动器拥有高响应速度和高的能量转换效率,这让介电弹性体柔性机器人拥有非凡的机动性和续航能力。例如以硅橡胶介电弹性体作为肌肉,硅橡胶薄膜为鱼鳍,仿照蝠鲼设计的水下驱动电子鱼在可在施加循环电压时,硅橡胶介电弹性体肌肉拉动鱼鳍摆动,使电子鱼可以像蝠鲼一样通过周期性摆动产生推力,实现游动,仿生鱼结构如图2所示。Sun等[8]受尺蠖爬行的启发设计了由丙烯酸介电弹性体薄膜、柔性拱体和单向轴承轮组成的柔性机器人,如图3所示,利用介电弹性体在电场中主动扩张和收缩的特性巧妙地构建单向可移动结构,当直流电压作用在介电弹性体薄膜时,薄膜沿同一个方向伸长而使机器人向前移动,最大爬行速度为2.2体长/s,且能负载自身3.8倍的重量,表现出优异的运动性能。
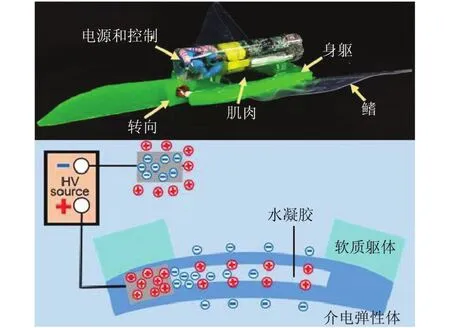
图2 蝠鲼仿生鱼照片及结构示意图
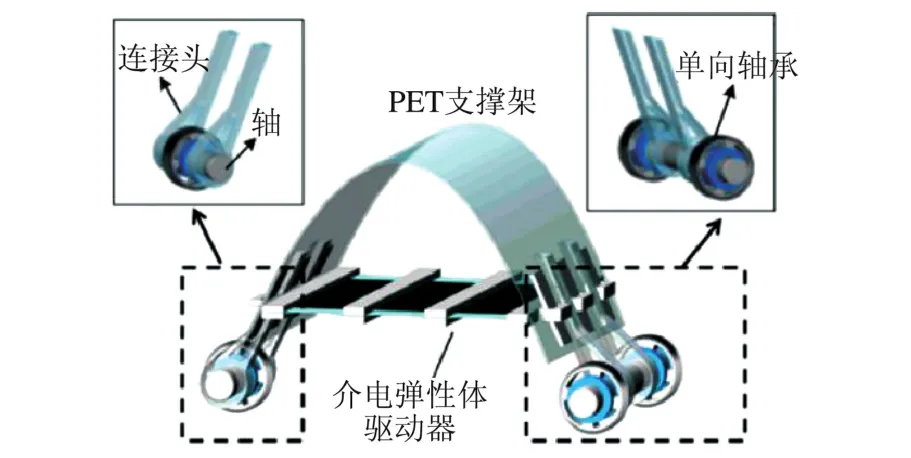
图3 单向柔性机器人结构图
隐形技术是传统伪装技术应用和延伸,也称为“低可探测技术”,分为雷达隐形、红外隐形、磁隐形、声隐形和可见光隐形等。介电弹性体驱动器可直接避免传统驱动器的机械零件碰撞摩擦,产生的噪声和热量低,声隐形和红外隐性能极佳,此类柔性机器人隐形性和静谧性远远优于传统机器设备。比如,在仿蝠鲼电子鱼设计中,通过设计丙烯酸酯透明介电弹性体膜,其中封装透明的水凝胶膜作为柔性电极,外侧则以水为电极,使得机器鱼整体透明,表现出高的伪装性能,而且机器鱼无马达,噪音极小,因此在隐形军事潜航器上拥有巨大的应用潜力。
利用介电弹性体的特性,柔性机器人能适应复杂和恶劣的工作环境。传统的“坚硬”型机器人由于连接关节的弊病而有诸多限制,他们不能够在狭窄的空间中移动,而且必须安装坚硬的壳体应对危险。柔性机器人具有柔性可变的身躯和关节,甚至不需要关节,意味着它能够在各种环境移动自如,这让它对复杂的环境适应性更强。不仅如此,柔性机器人还能适应各种极限工作环境,如超高压海底。在2021年,Li等[9]在仿蝠鲼电子鱼研究基础上,利用硅树脂介电弹性体仿照深海狮子鱼制造了可以用于万米深海的介电弹性体机器鱼,如图4所示。它采用了“以柔克刚”的策略,全柔机身让机器人尤其是内部电子元件无需耐压外壳就能够承受万米级别的深海静水压力,为深海和深空等极限条件下探测器的制备打开一面全新的窗户。为此,这款科研成果在2021年年初成为了国际顶级期刊《自然》的封面文章。

图4 仿深海狮子鱼柔性机器人照片
3 介电弹性体能量收集
众所周知,电动机和发电机的工作原理是相反的,电动机由电能转化为机械能的过程,是发电机将机械能转化为电能的逆过程[10]。同理,介电弹性体发电过程也是介电弹性体驱动器的逆过程。
介电弹性体发电机能够应用到能量收集领域,这衍生出多种类型的发电机,如用来收集自然能量的波浪发电机和风能发电机,或者用来收集人体运动能量的可穿戴发电机和接触式发电机。早在2000年,Ron[1]94-100便开始了对介电弹性体能量收集的研究,找到了从步行中收集电量的方法,将介电弹性体安装在皮靴的脚后跟上,捕捉每次鞋后跟撞击的能量。该装置有效地将鞋跟的压缩与多层隔膜阵列的变形耦合在一起。脚跟撞击发电机产生的最大0.8 J每周期的能量,可以被士兵用来补充电池电源,作为紧急备用电源或用于专门的机载启动功能,这开启了介电弹性体发电的大门。
4 介电弹性体扬声器领域的应用
介电弹性体隔膜作为介电弹性体驱动器的一种,它能在驱动电压下产生形变[11]。如果以高频交流电压驱动,介电弹性体隔膜会在交流电下高频振动,高频的振动会产生声音,这是介电弹性体扬声器工作的主要原理。介电弹性体扬声器类似于静电扬声器,是一种由两固定电极与振膜构成电容结构,不同的是介电弹性体扬声器的振膜换成了具有大变形的介电弹性体薄膜,且电极与介电弹性体薄膜紧紧黏结在一起,结构更加简单,具有质量轻、结构紧凑、可扩展性强和价格低廉的优点,能够适用于大小不同区域和平面以及非平面,在廉价低端和保真高端的扬声器都能找到用武之地[12]。
2013年,Christoph等[13]创新的以1 mm厚的VHB 4910丙烯酸酯胶布(3M)和100 mm厚的聚丙烯酰胺水凝胶(含NaCl)制备了介电弹性体,并在两侧制作具有高度可拉伸性和透明性的扬声器。音频信号经过高压放大器馈送到扬声器,高压交流电下介电弹性体产生振动,能在20~20 000 Hz的整个可听范围内发出声音,其工作原理如图5所示。
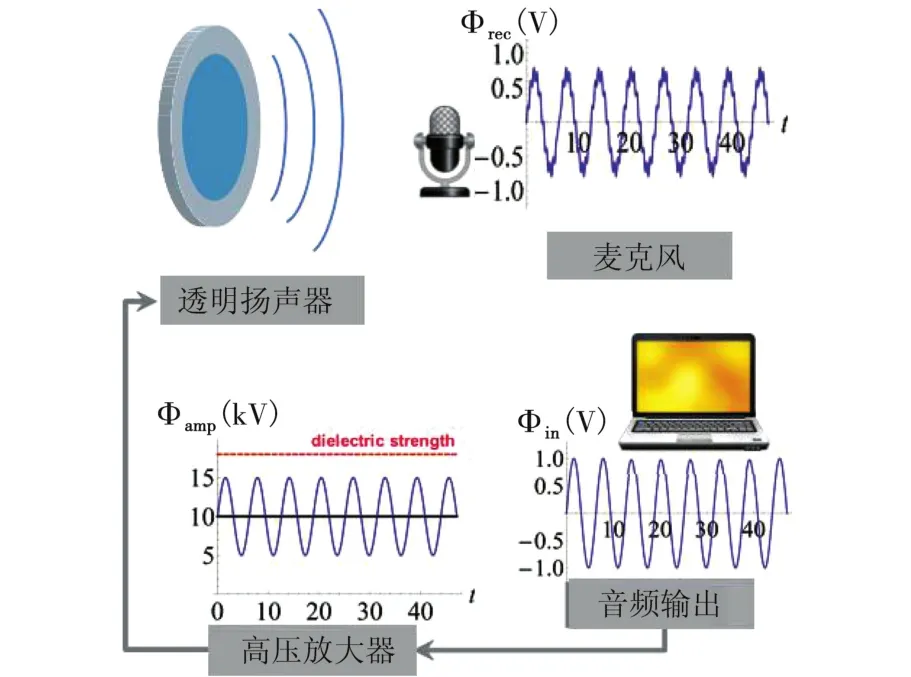
图5 透明扬声器工作原理图
2019年Cheng等[14]以3M公司的VHB 4905丙烯酸酯为研究对象,在以上透明扬声器的研究基础上,对介电弹性体的非线性动态响应进行了系统的实验研究和详细分析。作者设计了类似透明扬声器的实验装置来观察介电弹性体膜在交替激励下的振动模式并测量共振频率。在实验中发现介电弹性体在不同的激励频率下具有不同的响应模式,包括谐波、超谐波和次谐波响应,还发现等效电压和交直流比是影响次谐波响应发生的主要参数。以上实验观察可以更深入地了解介电弹性体在机电负载下的动态响应,给介电弹性体应用在扬声器、有源噪声控制和振动控制提供理论支持。
5 介电弹性体振动控制器
介电弹性体扬声器能够产生可控的振动,那么介电弹性体能否控制振动,这还需要进一步的实验验证。介电弹性体本身属于高分子聚合物弹性体材料,其高弹性特征在被动减振降噪领域已被广泛应用。如今介电弹性体作为柔性驱动器新身份重新出现在半主动和主动振动控制领域。一种方向是介电弹性体驱动器在直流电场中可控的大变形行为,使介电弹性体的刚度和阻尼能够随形变产生规律的变化,因此这为介电弹性体在主动减振降噪领域提供了可能。另一种方向是介电弹性体在高压交流电下具有不同的振动响应模式,此时的介电弹性体作为致动器产生大小相等、相位相反的振动来抵消传入的振动,从而实现主动振动控制。
为了验证介电弹性体对振动的控制效果,2012年,美国约克大学的Rahimullah等[15]使用波形微结构的Poly PowerTM有机硅弹性体薄膜制造的介电弹性体材料,表面离子溅射银作为电极,卷曲后得到柱状的介电弹性体执行器,并设计了一套自适应前馈振动控制系统用于降低振动的传播,如图6所示。介电弹性体执行器安装在质量块和激振器之间,电压在经过放大后输入到执行器,使执行器受控制以减少振动的传播。加速度传感器用于测量减振前后加速度大小,提供误差信号。在经过计算机的控制器计算后由模拟输出模型转换为电信号。该控制信号被电压放大器放大后被馈送到管状致动器,管状控制器根据信号适应激振器频率,改变自身刚度和阻尼,达到减振隔振目的。
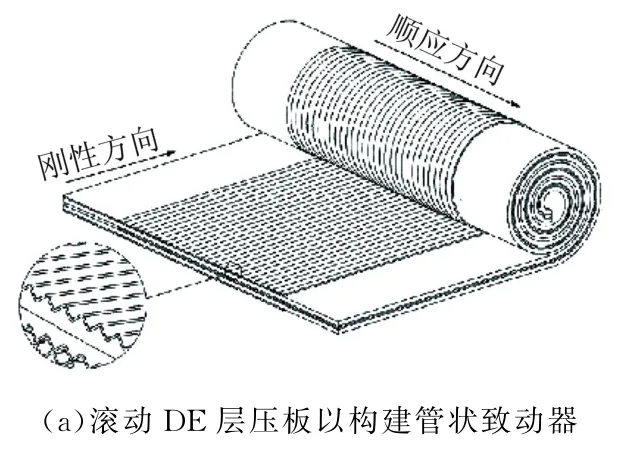

图6 自适应前馈振动控制系统
基于介电弹性体主动减振的相同原理,2017年,德国的William等[16]使用天然橡胶介电弹性体在设计的单轴实验台展示了在介电弹性体主动隔振方面的潜力,其主动减振实验台如图7所示。该实验台能够抑制共振峰,具有很好的减振效果。

图7 单轴实验台模型
以上研究已经充分证明介电弹性体在减振领域的较好的应用潜力。影响介电弹性体减振性能的因素包括弹性体本身的种类、黏弹性、刚度、阻尼、形状和介电常数等性能,也包括减振器设计结构、施加电压、激振频率、初始拉伸、计算机信号处理方式和反馈机制等外部影响因素。因此,未来的工作需要集中在介电弹性体和精确自动化制造工艺的开发上,此外,还需要进一步研究可靠性问题,包括稳定性和老化等性能。
6 介电弹性体在医学领域的应用
经过近二十年的研究,介电弹性体主要面向线性驱动器或触觉器件,如上述提到的柔性机器人,其潜力仍有待挖掘。基于介电弹性体与生物组织相似的特性,许多学者已经在探究介电弹性体驱动器在医学领域的应用,如使用介电弹性体制造可伸缩心脏支架和全软人工心脏。
设计一款全软人工心脏并非易事,一旦全软人工心脏研制成功,将会很大程度改变传统人工心脏制造。与传统人工心脏不同,全软人工心脏是依靠介电弹性体驱动器收缩和舒张模仿心脏跳动实现泵血功能,无需空气压缩机等额外辅助设备,这意味着全软人工心脏更轻,体积更小,消耗的能源更低,从而拥有高续航能力。Wu等[17]合成新型的聚磷腈介电弹性体,在无预应变情况下,驱动应变高达84%。他们利用PPZ制作了具有类似天然心脏功能的全软人工心脏,如图8所示。
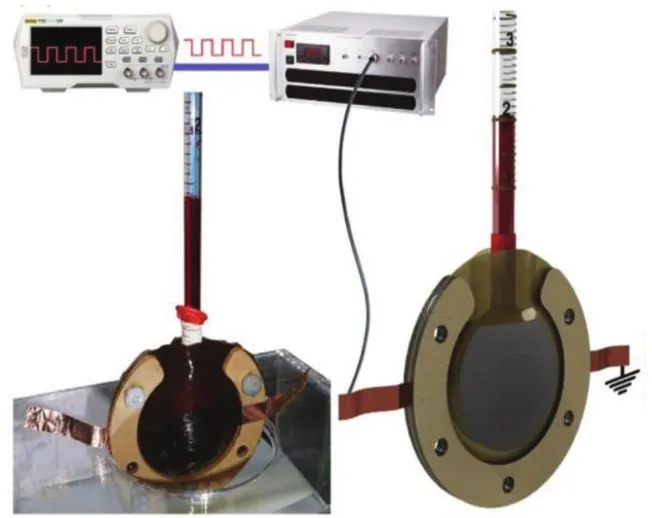
图8 全软人工心脏
人工心脏呈现橄榄球形状,在电场、信号频率和占空比的综合控制下规律跳动,实现泵血功能。Almanza等[18]开发了一种管状硅橡胶介电弹性体心脏辅助器,如图9所示。
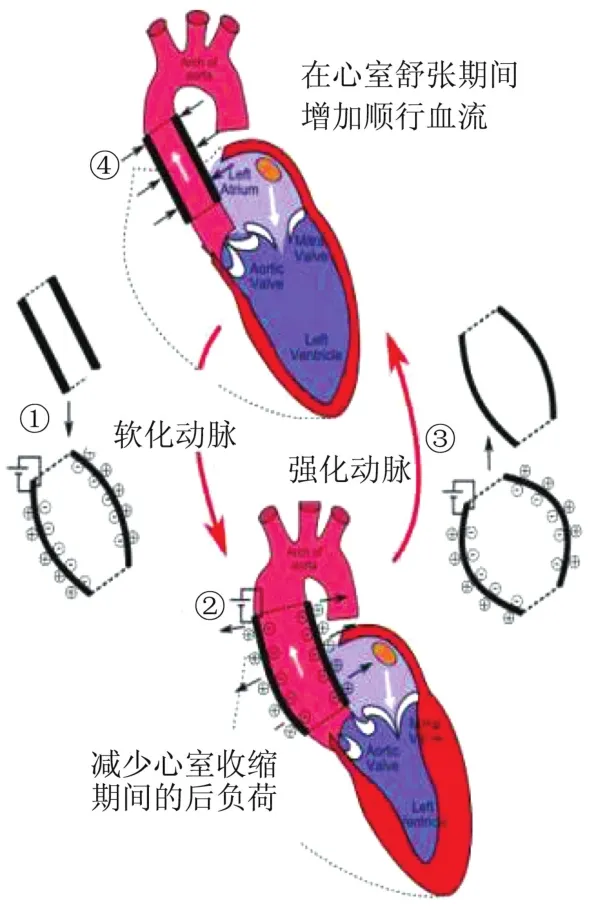
图9 心脏辅助器
它能够通过缓解主动脉在收缩期的变形和增加其在舒张期的压力来辅助心脏泵血。管状介电弹性体驱动器是由硅橡胶制成的,可以取代部分主动脉,基于介电弹性体刚度可控性,再现天然主动脉的软化和硬化行为,以此为血液流动提供能量。由于介电弹性体驱动器体积小并且能量密度大,相对于体积较大的气动驱动装置,具有更大的希望植入到心脏的主动脉中。此外,作者应用的硅橡胶无毒,与人体组织不黏连,自带抗凝血作用,是一种具有生理惰性材料,相对于目前普遍使用的冠状动脉金属支架,将更适用于心脏手术。作者对介电弹性体应用到心脏主动脉的研究系首创,为介电弹性体的医学应用提供了新思路。
7 介电弹性体柔性传感器
传感器作为一种拥有检测或者反馈机制的仪器,应用极其广泛,当前倍受关注的一键物联、智能家居、智能交通、智能驾驶等,对传感器技术的需求巨大。传感器通常由敏感元件和转换元件组成。传感器的分类多种多样,按照材料可分为:半导体、晶体、陶瓷、有机复合、金属、高分子聚合物、超导、光纤、纳米材料等。柔性的复合材料传感器是当前发展的重点,对于柔性传感器要求,一般拥有拉伸、弯折、压缩的能力,并且耐化学腐蚀、耐候性较好,所以高分子材料是柔性传感器良好的基体材料。根据传感机制的不同,柔性传感器可为电阻式、压电式、电容式等传感器,其中电容式压力传感器结构简单、极高的循环稳定性、低电压操作等优点使其成为传感器中应用最广泛的存在。电容C的决定式见公式(1)。电容器两平行板正对面积S、相对介电常数ε和两平行板间的距离d是决定电容大小的主要因素,k是静电力常量。又从前文可知,在两侧涂覆柔性电极的介电弹性体薄膜本身就是一种电容器。且电容随介电弹性体薄膜厚度或形变而发生规律的改变,进而识别施加在电容器上的压力大小,因此介电弹性体是制作电容式压力传感器的优选材料。

Zhuo等[19]使用聚二甲基硅氧烷(PDMS)作为弹性介电层制备电容式的压力传感器。在制备过程中发现PDMS介电层无法在非常小的压力下产生足够的变形来获得可检测的电容变化。因此,传统的平板压力传感器不适用于人体穿戴检测如脉搏一般的微弱信号。为了提高电容式压力传感器的灵敏度,作者采用3D打印制造了不同的微结构PDMS薄膜,在薄膜内部形成气孔以降低弹性阻力,引起更大的弹性形变,还能在压缩下引起弹性体介电常数的规律变化,如图10所示。
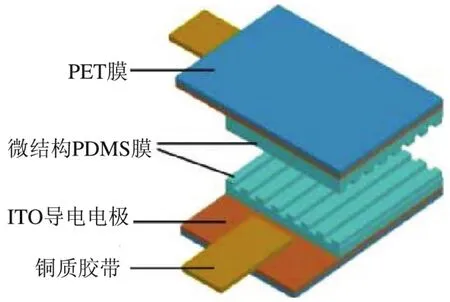
图10 制造的电容式压力传感器的器件结构示意图和成品器件的照片图像
根据电容的决定式,d和ε双重影响,使电容产生更大的变化,进而提高电容式压力传感器的灵敏度。实验结果证明,制备的传感器器件实现了比以往使用微结构硅片模具的工作更高的灵敏度,能够实时监测人体微弱的生理信号。该设备还具有快速响应、优异的耐久性和良好的环境耐受性,更具有使用价值的是结构简单成本低,为可穿戴柔性传感器制造提供了借鉴。
与上述通过改变ε和d不同,熊耀旭[20]采用构筑传感层的微纳结构,通过改变电容器S和d,提高电容式压力传感器的灵敏度。具体情况是采用模板转印的方式制备具有表面凸型微结构阵列,结构如图11所示,由两个带有凸型微结构阵列的镀金聚二甲基硅氧烷薄膜和中间聚偏氟乙烯层组成。在外部压力下凸型微结构阵列产生形变,S增加为S′,d减小为d′,从而产生明显变化的电容信号。实验结果证明,传感器具有高灵敏度、快速响应性和出色的循环稳定性,并成功检测到各种人体生物信号,为可穿戴传感器的研制提供更加广阔的思路。
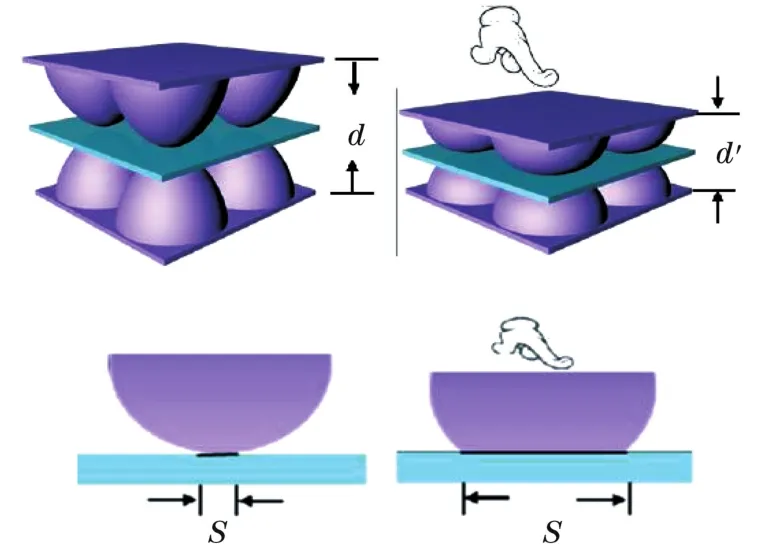
图11 压力对d和S的影响示意图
8 结束语
介电弹性体作为新兴的智能软材料,因其质量轻、形变大、反应时间短、机电转换效率高等优点,广泛用于如机器人、潜航器、飞行器等驱动领域,以及人工心脏和心脏辅助器等医学领域,也可在穿戴发电机、波浪发电机、接触式发电机等能量收集领域找到应用。介电弹性体在驱动过程中的刚度、阻尼可变性和可控振动特性,为新型扬声器和减振隔振器的制造创造无限可能。除此之外,介电弹性体还能用来制造电容式压电传感器,此类传感器结构简单、极高的循环稳定性、低电压操作等优点,必然能让介电弹性体在未来传感器领域中大放异彩。
猜你喜欢
青少年科技博览(中学版)(2022年9期)2022-11-01 08:21:30
家庭影院技术(2021年7期)2021-08-14 02:58:44
弹性体(2021年6期)2021-02-14 05:39:00
电脑爱好者(2020年6期)2020-05-26 09:27:33
家庭影院技术(2019年8期)2019-08-27 02:45:02
材料科学与工程学报(2016年1期)2017-01-15 13:34:10
创新作文(小学版)(2016年11期)2016-11-11 05:45:38
光学精密工程(2016年5期)2016-11-07 09:06:04
橡胶工业(2015年3期)2015-07-29 08:24:16
上海电机学院学报(2015年3期)2015-02-28 14:29:52