
基于差分BDS的脉冲测量雷达标校设计与实现
2023-01-06 03:09:32刘洪林姜晶莉
兵器装备工程学报 2022年12期
郭 健,许 庆,刘洪林,姜晶莉
(航天工程大学 士官学校, 北京 102200)
1 引言
脉冲测量雷达(以下简称雷达)服务于航天运载火箭、导弹的外弹道跟踪测量任务,用以获得目标位置测量参数,是航天测控任务中重要的装备。雷达标校如同射击任务前对枪械的校准一样,是提升雷达测量精度的重要手段。目前主要的雷达标校方法为常规标校与卫星标标校2种。其中,雷达常规标校是利用方位标、标校源、标校塔等设施,通过配置在随雷达天线共同运动的光学望远镜的光轴为基准和中介,标定雷达机械轴和电轴之间的系统误差,是雷达长期和广泛使用的标校方法。常规标校通常需要建立3~4个方位标和1个标校塔,占用地方大,需要设备多,且人工操作繁琐。卫星标校是用人造地球卫星进行的雷达动态标校。利用准确的站址和精确的卫星位置,根据设备的误差模型求解设备的轴系误差和零值误差,但是卫星过顶的窗口次数有限且不能进行目标距离值的标定校准。
随着北斗卫星导航系统的发展,已经具备实现差分北斗定位技术(以下简称差分BDS)完成雷达绝对坐标测量精度的校验。与常规标校、卫星标校方法相比,具有动态标校趋于实战任务、不受场地条件的影响、不受时间窗口的约束、技术自主可控、成本低、操作便捷等优势,研究价值日益凸显。
2 基本原理
2.1雷达标校
雷达标校又称校验,分为标定和校准2项内容。其中,标定是对给定的目标,由被标校的雷达测出目标的测量值,由此得到数据样本的算术平均值。由标准设备测出目标的真值。校准是根据系统误差对雷达距离零值和角度零值进行修正,完成对雷达的校准[1]。
雷达常规标定利用方位标精确的大地测量值作为雷达的方位和俯仰基准值,然后与雷达光轴对方位标的实测数据比对,实现雷达天线的标定。雷达的常规标定需要建设多个方位标和一个标校塔[2]。
在理想条件下,标校塔与雷达天线的距离应当满足的关系如下:
(1)
式中:R0为标校塔距雷达天线距离;D为雷达天线口径;λ为雷达工作波长。
经统计,在满足常规标校条件下,雷达在C波段,频率范围在4~8 GHz,天线口径分别为2.5 m、5 m 、10 m、20 m、40 m,天线俯仰角为1°时,标校塔距雷达天线距离R0和标校塔相对天线中心的高度H参考值如表1所列[3]。随着天线口径大于10 m,标校塔的距离和高度就难以实现,因此仅适用于中、小口径天线的雷达标校,对于大口径天线必须寻找新的标校方法,从而克服场地条件制约的问题。
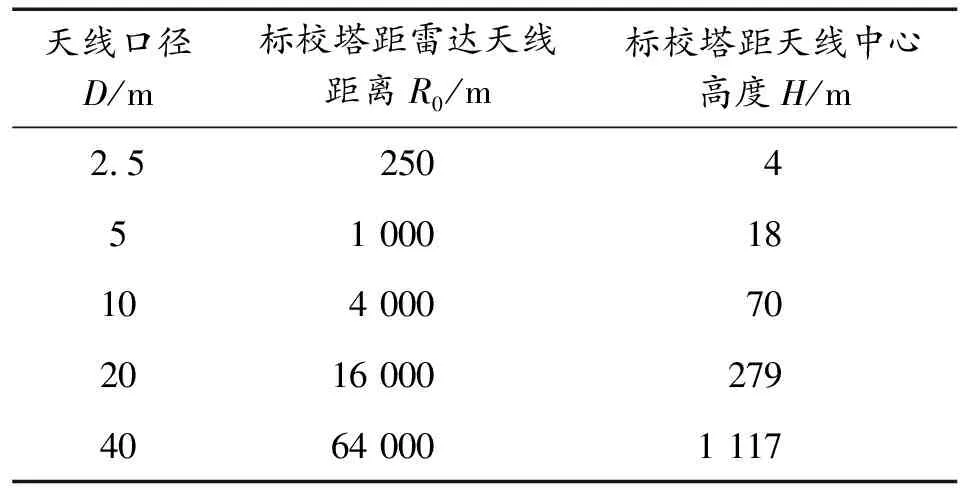
表1 C波段雷达标校塔的距离和高度参考值
2.2 差分BDS技术
差分BDS技术以广泛应用于测绘领域的实时动态定位(real-time kinematic,RTK)技术为代表。工作原理如图1所示,是将一台北斗接收机安装在位置已经精确测定的基准站,这台接收机的伪距观测值经过计算的精确距离值比较,得到北斗接收机的伪距修正值[4]。再将这个修正值经过信通链路传递给目标上的北斗接收机,作为目标上北斗的伪距修正值。利用了基准站接收机和目标上接收机共同观视卫星星座的相关性,消除其公共误差,提高了定位精度[5]。目标上的北斗利用修正后的伪距,实时解算出某一时刻目标在空中的位置坐标,并加时标后传回雷达,同时基准站北斗的时间系统同步雷达的同步器。由雷达同步器对雷达数据通道进行同步采样取数,得到同一时刻雷达测量目标的坐标数据,并与目标上北斗传回数据进行实时对比,得到雷达的绝对坐标测量精度[6]。
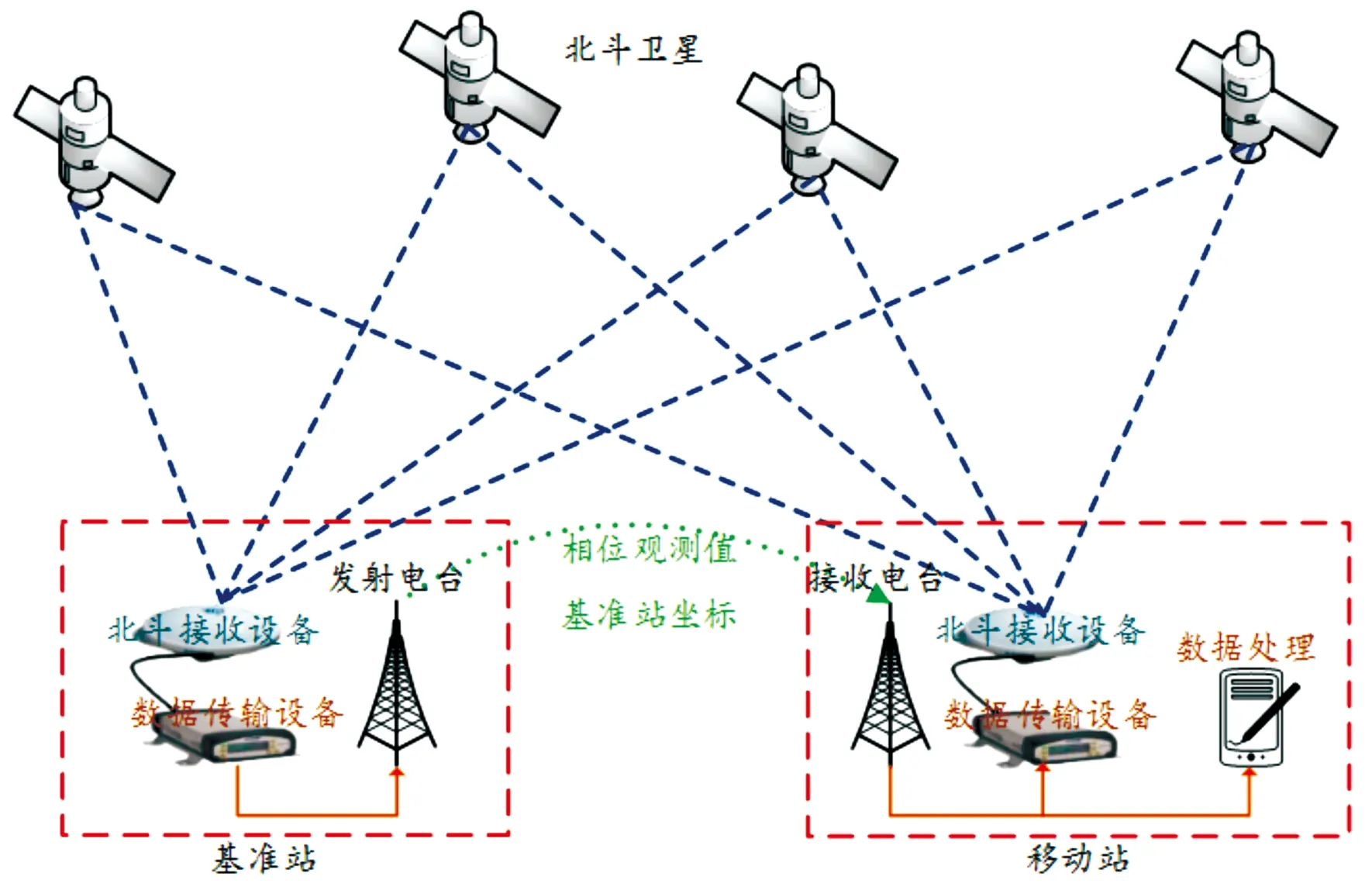
图1 差分BDS定位工作原理示意图Fig.1 Differential BDS positioning principle
基准站通过测量出可视卫星的伪距,并与自身所在位置数据比较,给出可视卫星伪距修正值和BDS系统的秒脉冲。伪距修正值经过编码调制后,由短波通信机发送给目标载BDS系统,并接收目标载BDS系统发回的目标位置数据和时标,经解调译码后送计算机。雷达同步器接受BDS系统的秒脉冲同步,并对雷达数据通道同步采集取数,送给计算机,使雷达采集的目标数据与BDS系统获得的目标数据相关[7]。基准站BDS采用12通道相位平滑型伪距差分接收机,并采用高增益接受天线。计算机将BDS系统获得的目标数据变换成极坐标数据,与雷达测量的目标数据进行比较,完成误差分析,得出雷达测量目标距离、方位角和俯仰角的精度[8]。
移动站通过通信天线接收基准站传来的可视卫星伪距的修正值,BDS天线接收可视卫星的伪距,用计算机对伪距进行修正,并对修正后的多颗卫星的伪距进行解算,得到目标精算的空间位置[9]。将目标位置数据加时标、编码和调制,由短波电台通信机发给雷达基准站。BDS天线采用目标载动态天线。BDS接收机采用双频带差分输入口的接收机,以便减小接收通道的信号时延。
差分BDS基准站与雷达相配合,利用已知大地测量成果点进行联测,确定雷达站点坐标和地标点坐标,使其坐标点的精度达到毫米级[10]。在地标点上位置信标与雷达相配合,并利用这两点基线的指向定标雷达的方位,完成定北。并且可以同时校准天线的电轴。
3 基于差分BDS的标校设计
利用无人机标球载差分BDS标定可以精确测量目标位置作为雷达标定的基准,取代了雷达常规标校以光轴中介及其引入的标定误差,可直接标定雷达电轴与机械轴的偏差。差分BDS校验脉冲测量雷达精度的标校设计主要由无人机球载差分BDS移动站接收机、地面差分BDS基准站接收机、时统、数据录取处理设备以及坐标点测量组成。如图2所示,对标校球在某段时间进行测量,首先由BDS和时统设备提供精准的时间,再由差分BDS系统测量标校球的空间位置,数据录取处理设备将其测量的地心坐标(L,B,H)变换成大地球坐标(R,A,E),作为标校基准值。同时,雷达跟踪标校球,获得标校球的空间(Rc,Ac,Ec)的测量值。最后由数据录取处理标校球坐标的测量值和基准值,得到雷达坐标的系统误差,作为雷达测量的校正量。
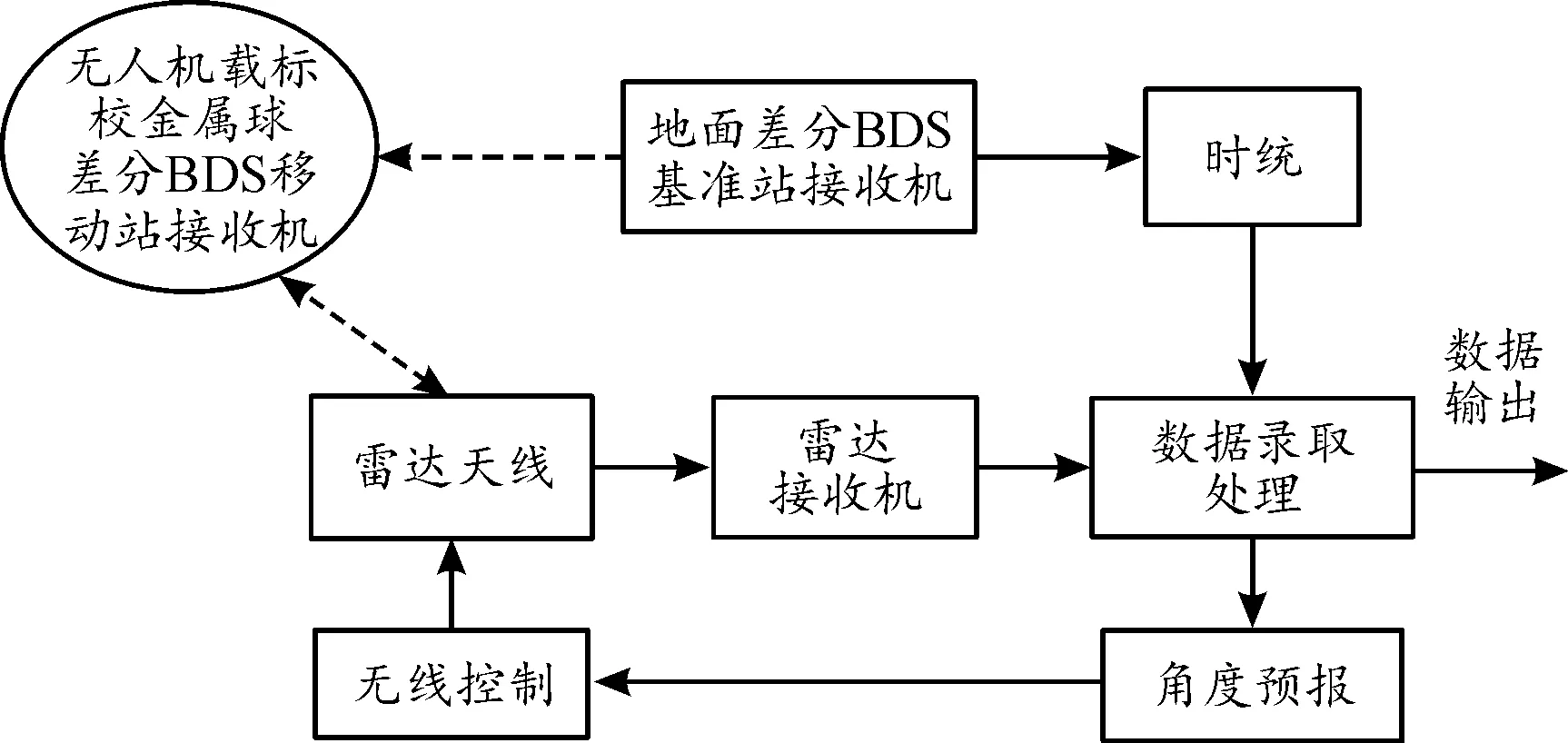
图2 差分BDS标校设备组成框图Fig.2 Differential BDS calibration equipment
3.1 差分BDS自检
利用差分BDS系统对雷达绝对坐标测量精度进行检验,是以差分BDS有高定位精度为基础,因此要对差分BDS系统设备,必须进行定位精度检验[11]。按照先静态测量,再动态测量的步骤完成差分BDS自检。
静态测量是将差分BDS基准站安装在已知坐标点上,移动站放置在一个固定点上(LPo,BPo),使它们都投入正常工作,记录其坐标数据(LPi,BPi)连续观测30 min,然后计算公式计算点位误差。求出每一观测值与固定点经度、纬度的误差,即(ΔLPi,ΔBPi)=(LPo-LPi,BPo-BPi),然后统计出经度、纬度和定位位置的误差。
经度误差为:
(2)
纬度误差为:
(3)
定位位置误差为:
(4)
动态测量是将差分BDS基准站安装在已知坐标点f上,差分BDS移动站放置无人机载标校球上。设置若干个固定点位,组成闭合环形。移动站在运动中测量,每到一个固定点位记录经度和纬度,沿环形路线重复记录N次,统计在同一点上N次记录的一致性及偏差。取数据的中值近似为真值,即
(5)
然后利用式(1)~式(3)和移动状态记录的数据统计测量定位精度。
3.2 坐标转换
差分BDS技术采用的是大地坐标系(B,L,H),而雷达系统通常采用以雷达为原点的站心极坐标(R,A,E)。因此在标校前必须完成坐标转换。坐标转换的步骤包括:大地坐标(B,L,H)转换为空间大地直角坐标(X,Y,Z);空间大地直角坐标(X,Y,Z)转换为站心直角坐标(x,y,z);站心直角坐标(x,y,z)转换为站心极坐标(R,A,E)。这样才能将机载差分移动站BDS所输出的目标位置数据作为真值与被测试雷达所测目标机的位置数据进行比较计算其精度。
3.3 差分BDS标校
无人机标球载差分BDS标定除了能够完成雷达常规标定的方位轴不垂直于地平面(大盘水平度)测量、距离零值、方位角零值、俯仰角零值、重力下垂角的测定、角度定向灵敏度、俯仰轴不垂直于方位轴(方位轴、俯仰轴正交度)测量等项目外[12],还扩展了包括:雷达接收通道幅度、相位、大气折射误差、雷达散射截面积RCS测量、雷达威力测量等雷达目标和大气环境影响测定的项目。
雷达正常工作,无人机载标校球起飞。利用差分BDS测量标校球的方位角A(t)、俯仰角E(t)作为基准值。扫描控制天线方位角AC(t)=A(t)+θA/2、俯仰角EC(t)=E(t)+θE/2,其中,分别是雷达方位和俯仰的波束宽度。记录统计接收机和、差、差三通道信号的幅度和相位数据均值。扫描控制天线方位角AC(t)=A(t)-θA/2、俯仰角EC(t)=E(t)-θE/2。再次记录统计接收机和、差、差三通道信号的幅度和相位数据均值。将2次记录统计三通道信号的幅度和相位数据均值再取平均。将方位、俯仰差通道幅度、相位值与和通道幅度、相位值分别进行比较,将其差值存储,作为雷达跟踪测量时的幅度、相位校正量。
在差分BDS标定的基础上,通过计算机建立校正模型,实时进行解算。记差分BDS定位解算和雷达的实际测量标校球的坐标数据,为了减小雷达天线控制系统动态滞后对测量系统误差的影响,系统采用轴向跟踪的跟踪方式,使雷达电轴始终对准标校球。雷达接收机跟踪获得的角误差与经系统误差修正后的码盘输出值相加,由站心极坐标系到大地直角坐标系变换,大地直角坐标系进行滤波预测,再由直角坐标系到极坐标系变换得到预测值。预测值与系统误差修正后的码盘输出值相减,控制天线伺服驱动,获得雷达对标校球的测量值。以测量值为基准,统计测量精度得到系统误差,将系统误差进行修正,重复对标校球跟踪,直到获得稳定的系统误差,并记录一组差分BDS解算和雷达的实测数据。
利用校正模型按照最小二乘法[13]进行回归解算,获得机械轴与电轴的方位、俯仰偏差以及天线重力下垂偏差,最终汇总雷达位置标校的系统误差、起伏误差以及对目标测量后需要的精准校正值。
3.4 精度鉴定
雷达与差分BDS系统同时跟踪同一个目标,事后将同一时段该目标的精确轨道作为比较标准反算至设备测量元素,与雷达设备测量数据进行比对,利用数理统计方法得出设备测量元素的误差特性。用精确坐标反算测量坐标系中的测量[14],已知:
精确坐标经部位修正后的目标在发射坐标系中的坐标:tj,xgj,ygj,zgj。
测站在发射坐标系中站址坐标:xok,yok,zok,k=1,2,…,m。
雷达经角坐标转换后的资料:tj,Rj,βj,αj
(6)
(7)
(8)
(9)
(10)
雷达数据减去标准数据的一次差为:

测量误差的统计计算公式如下:
误差均值:
(11)
式中,Xj为上式中的ΔRj,Δβj,Δαj,(下同)。
总误差σZWC:
(12)
随机误差σSJWC:
(13)
系统误差σXTWC:
(14)
用变量差分法和最小二乘法拟合残差法统计随机误差[15],此方法直接利用雷达对目标的测量数据统计雷达的测量误差,以评定雷达测量的距离、角度、径向速度的精密度。
变量差分法公式:
(15)
(16)
式中:P为差分阶数;L为差分步长。
最小二乘法拟合残差法公式:
(17)
式中:
(18)
S=(s1,s2,…,sN)T
(19)
(20)
式中,P为拟合多项式阶数[16]。
当所统计的系统误差和随机误差均不大于雷达研制任务书要求指标时,评定雷达测量的精度为合格,否则为不合格。
4 实例应用
实例采用大疆M600 PRO型6轴无人机搭载并联机械臂下携直径为300 mm的标准金属球。将差分BDS移动站设备、数据传输和电源安装在标准金属球内。BDS天线由金属球的上方伸出,电台通信天线由金属球的下方伸出。差分BDS设备采用QFRTK-B5微型基准站、QFRTK-B5微型移动站。雷达工作C波段,天线口径5 m。实例借助北京无线电测量研究所驻河北易县试验场区进行验证。
如图3所示,雷达与差分BDS系统同时跟踪无人机载标校金属球,事后将同一时段无人机的精确轨道作为比较标准反算至设备测量元素,与经过误差修正的雷达测量数据进行比对,利用数理统计方法得出雷达的误差特性综合分析。
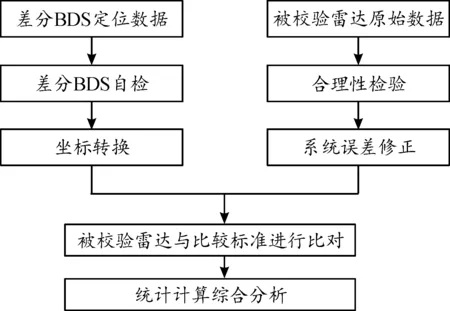
图3 数据录取处理过程Fig.3 Data admission process
根据表2可知,通过对经校准前后的常规标校、差分BDS标校以及雷达实测数据作比较,得到经校准后雷达对距离、方位角、俯仰角的测量数据精度合格,并有效地保持在精度范围内并且优于常规标校测量值,从而证实了差分BDS校验雷达精度的可行性。
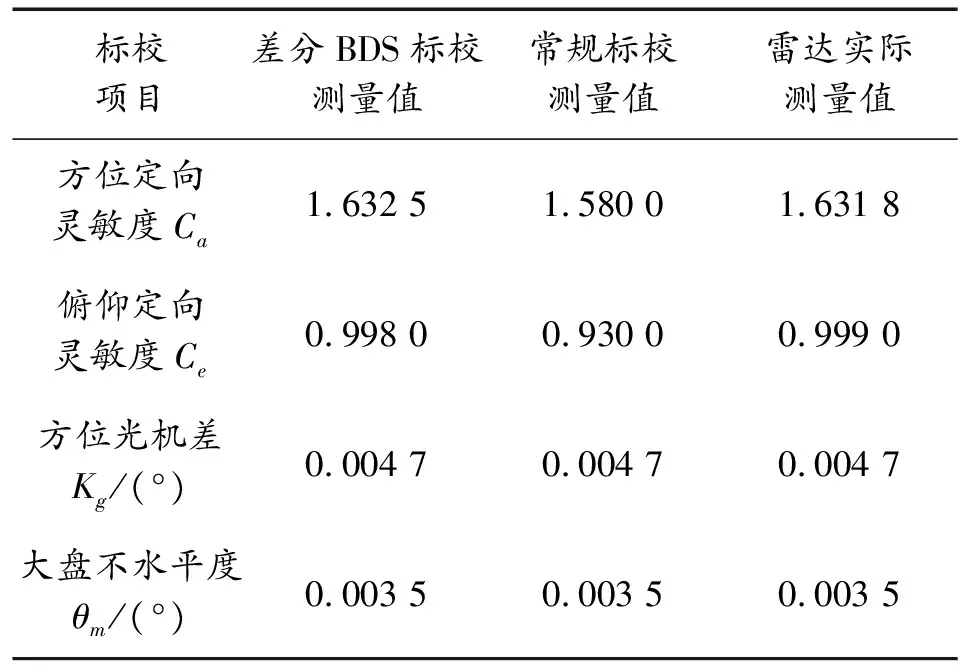
表2 标校数据与实测数据比对
5 结论
1) 采用无人机球载差分BDS移动站与地面差分BDS基准站组成的系统代替雷达常规标校塔的标校方案,实现雷达动态标校,解决了大口径天线雷达标校中场地条件制约的难题,工程应用前景广阔。
2) 通过某型C波段脉冲测量雷达开展标校试验结果证实该方法切实可行,尤其是针对俯仰定向灵敏度、方位定向灵敏度以及天线大盘不水平度的标定满足脉冲测量雷达校验精度的要求。
3) 采用差分BDS标校方法的工作流程具有极高自动化能力,有效避免了常规标校中观察员通过光学目镜标定这类人为因素对于标校系统的影响,提高了标校数据的参考价值。
猜你喜欢
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
科学技术创新(2021年11期)2021-05-25 10:04:18
电子制作(2019年7期)2019-04-25 13:17:42
宇航计测技术(2018年3期)2018-09-08 02:21:32
北京航空航天大学学报(2017年4期)2017-11-23 05:48:25
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
系统工程与电子技术(2016年7期)2016-08-21 13:58:58
信息安全研究(2015年3期)2015-02-28 20:17:57
装备环境工程(2015年5期)2015-02-28 01:20:35
海军航空大学学报(2015年4期)2015-02-27 13:45:50
