小开口级联同步扫描水下激光引信设计与建模
2023-01-05 12:56徐光博查冰婷郑震张合
兵工学报 2022年12期
徐光博, 查冰婷, 郑震, 张合
(南京理工大学 智能弹药技术国防重点学科实验室, 江苏 南京 210094)
0 引言
目前水下鱼雷引信探测目标时大多采用磁探测和声探测体制。然而,各种声诱饵和非金属涂层将会导致此类引信的失效[1-3]。20世纪60年代水下蓝绿透光窗口发现以来,因蓝绿激光在水下具有透过率高、抗干扰能力强、分辨率高等优点,为水下目标探测开辟了新途径。因此,开展水下激光近炸引信的研究具有非常重要的意义[4-11]。
配合定向战斗部的激光近炸引信需提供目标距离和方位信息,由于引信与目标之间的交会角度未知,因此激光近炸引信需具备全周向探测能力[4]。目前常用的激光引信全周向探测方案主要有多辐射方案、分区方案、分区扫描方案和周视扫描方案。周视扫描方案具备体积小、结构简单等优点,是目前激光全周向探测的主要设计方案[9-11]。
李彦[12]提出一种基于圆锥形反射镜的周视探测方法,准直激光束通过该反射镜被分配在整个360°空间内向外发射。应用在水下环境时由于激光器能量被大量分散而无法实现远距离探测。李洛[13]设计了一种六发六收的脉冲激光周向探测引信,依靠弹丸的自身旋转实现周向探测。但此类方法不适用于水下鱼雷等不旋转弹。Tan等[14]提出单光束同步扫描的周视探测方法。其单光束扫描的方式将减少引信内部的可利用空间,且透光窗口中的加强筋将导致引信产生扇形扫描盲区。钟昆等[15]提出水下激光周视扫描4f发射光学系统设计,采用开普勒望远镜结构转移扫描基点的发射光学系统,有效地避免了扇形盲区。但此方案结构复杂、成本高且仍无法解决引信内部空间利用率低的问题。
与上述文献相比,本文研究在3个方面有所改进:1)为解决传统方案存在的空间利用率低、扇形扫描盲区和由于激光器能量被大量分散而造成的探测距离缩短等问题,本文提出一种小开口、5组扫描单元级联的水下激光近炸引信方案(以下称小开口激光引信);2)针对新引信的结构特点建立同步扫描多参数优化模型,得到了最佳扫描频率、最佳脉冲频率、各扫描单元的通光时间以及引信内部可利用空间率;3)建立引信回波能量分布模型,得到回波信号能量最微弱时的弹目交会姿态,为量化分析引信对目标的捕获能力提供了一定参考。
1 设计思路与工作原理
如图1(a)所示,传统单光束同步扫描方案为实现脉冲激光的360°全周向扫描,其发射光路上不能有任何遮挡,则引信内部的大部分空间被浪费;此外,由于水下透光环窗的承载能力不足,须采用加强筋的方式以提升引信整体强度[16]。因此,传统的扫描方式会天然地产生扇形盲区,不利于探测高速运动的水下目标。
图1 发射方案对比示意图Fig.1 Schematic diagram of conventional and newly-proposed launch schemes
针对上述问题,本文提出了一种小开口激光引信,如图2所示。引信主要由激光器、信息处理模块和5组小开口扫描单元组成。所述扫描单元包括共轴设置的激光接收模块、激光接收棱镜、双出轴电机、激光发射棱镜和光纤。小开口激光引信的发射方案示意图如图1(b)所示,其仅在扫描单元内部不允许存在遮挡物。与传统方案相比,引信内部的可利用空间大幅提升。此外,小开口激光引信采用10片小型透光玻璃,实现了透光窗口的小型化,提高了水下激光引信的整体强度和密封性,避免了加强筋带来的扫描盲区。激光发射与接收均采用棱锥形反射棱镜,实现了激光在扫描单元内的往复扫描,提高了激光能量利用率。
图2 小开口级联同步扫描水下激光引信结构示意图Fig.2 Schematic diagram of the structure of a small-opening cascade synchronous scanning underwater laser fuze
如图3所示,激光器发射出脉冲激光束后,通过光开关传入到指定的扫描单元中,同时双出轴电机带动激光发射棱镜旋转产生90°扇形扫描光场,5组扫描单元有序交替工作可实现引信的全周向扫描。引信探测到目标后,通过激光接收棱镜将目标回波光束反射到激光接收模块中。与此同时,在双出轴电机上安装有磁钢,固定放置的磁传感器实时接收磁钢的磁感应强度和方向。以上信息传递到信息处理模块可解算出目标的距离、速度、方位。
图3 小开口级联同步扫描水下激光引信光路示意图Fig.3 Schematic diagram of the light path of a small-opening cascade synchronous scanning underwater laser fuze
2 同步扫描多参数优化设计
2.1 扫描单元个数与可利用空间率
小开口激光引信的激光发射光束与接收视场交会示意如图4所示。图4中,Otr为激光发射中心,Ore为激光接收中心,dOreOtr为Otr点与Ore点之间的距离,αtr、αre分别为激光发射光束中心偏角和激光接收中心偏角,βre为接收视场角,β1为发射光束发散角。

图4 激光发射光束与接收视场交会示意图Fig.4 Schematic diagram of the intersection of the emitted laser beam and the received field of view
图4的阴影区域,即三角形ABD中目标表面反射的回波光束可以被接收视场完全接收。为提高引信的可靠性,目标应位于该区域内,因此称Otr点到探测区域起始点A的周向距离Rtr为探测起始半径,Ore点到探测区域终止点D的周向距离Rre为探测截止半径。由图4中的几何关系得:
(1)
对于水下激光引信而言,发射光束发散角βl、接收视场角βre、dOreOtr的可变范围很小,而αre、αtr的改变较为容易。绘制当dOreOtr=0.15 m、βre=1.9°、βl=0.15°时Rtr、Rre随αre、αtr的变化规律如图5所示。

图5 Rtr、Rre随αre、αtr变化关系图Fig.5 Relationship between Rtr,Rre and αre, αtr
由图5(a)可知探测起始半径Rtr随αre、αtr的变化幅度很小,大约在1~2 m之间。所以引信的探测盲区是不可忽略的。由图5(b)可知探测截止半径Rre在αre与αtr的大部分组合中取值较小,仅为5 m左右,很难满足探测需求。故选择αre=92°、αtr=90°,此时Rtr≈2 m,Rre≈34 m。以此为基础建立引信单个扫描单元的探测模型如图6所示。
图6 引信单个扫描单元探测模型Fig.6 Single scan unit detection model
如图6所示,扫描光场的红色区域为盲区,蓝色区域为探测有效区。其中鱼雷半径为Rf,引信中心O与扫描单元的的激光发射中心Otr的距离为Rt,探测盲区半径RA=Rt+Rtr,探测有效半径RD=Rt+Rre,引信所需扫描单元最少个数为

(2)
式中:「·⎤为向上取整。则引信内部的可利用空间率为
(3)
2.2 最佳扫描频率
本文重点研究引信对鱼雷等高长径比目标的捕获能力,建立引信与目标交会的示意图如图7所示。

图7 弹目交会示意图Fig.7 Model diagram of bullet-target encounter
图7中引信坐标系为Omxmymzm,Om为引信模型的激光发射中心,xm轴为鱼雷前进方向,ym轴垂直于鱼雷前进方向向上,zm轴与xm轴、ym轴构成空间右手坐标系。建立目标坐标系Otxtytzt,其中Ot为目标头部的中心,xt轴为目标前进方向,yt轴垂直于目标前进方向向上,zt轴与xt、yt构成空间右手坐标系。θt为目标俯仰角,ψt为目标偏航角。以上所有参数的第1个上角标代表所在坐标系。
目标坐标系可认为是引信坐标系先绕Omzm逆时针旋转θt,然后再绕Omym轴逆时针旋转ψt,则引信坐标系转换到目标坐标系的转换矩阵为
(4)

(5)

(6)
引信坐标系到目标坐标系的转换矩阵为
(7)
设目标长度为lt,目标头部中心点为Th,目标上最先接触扫描光场的点为T0,最后接触扫描光场的点为T1。如图8所示,在相对运动坐标系上目标相对于扫描光场沿xr轴平动(图8中绿色平面),则其在扫描光场中的停留时间为:T0点进入光场到T1点脱离光场的时间间隔ΔT。
图8 相对运动坐标系中弹目交会示意图Fig.8 Model diagram of bullet-target encounter in a relative motion coordinate system
图8中的扫描光场Ωm在引信坐标系中的参数方程为

(8)


(9)
设初始位置时目标上任意一点坐标为
(10)
式中:0≤μ≤1。由于在相对运动坐标系上目标穿过扫描光场的部分在Orzryr平面的投影与扫描光场的有效部分在Orzryr平面的投影重合则:
(11)
由(11)式可解出μ的具体取值范围,则
(12)
令T0点接触光场时的坐标为
(13)

(14)

(15)
设d=10 m、ω=30°、γ=0°、vm=55 kn、vt=50 kn、lt=3 m,则ΔT在目标不同姿态下的分布规律如图9所示。

图9 ΔT在目标不同姿态下的分布Fig.9 Distribution of ΔT with different target attitudes
由图9可清晰看出目标在扫描光场的最小停留时间并非在θt=0 rad、ψt=π rad,即引信与目标迎头相遇的交会情况下。这是因为虽然此姿态下相对运动速度最大,但是相对位移也是最大的。

如图10所示,只有当目标相对于扫描光线平行运动时,T0、T1点才能同时进入、离开扫描光场。此时,目标在长度方向上相对于扫描光场的位移为0 m,故对于高长径比目标来说此姿态下ΔT最短。但由于扫描频率的增加只能增加扫描到目标的周期数,而相邻周期内的目标相对位置和姿态变化很小,提高扫描频率对目标的捕获能力提升很小[10]。故采用最低扫描频率作为引信的最佳扫描频率。设目标直径为dt,则最佳扫描频率为
(16)
图10 目标相对于扫描光场平行运动示意图Fig.10 Schematic diagram of parallel motion of target relative to the scanning light field
2.3 最佳脉冲频率
小开口激光引信的一个扫描单元发出的脉冲激光束向平面Omymzm投影示意图如图11所示。

图11 脉冲光束在平面Omymzm的投影示意图Fig.11 Projection of pulsed beam on the plane Omymzm
图11中虚线圆弧为圆锥形扫描光场的部分轮廓,其半径Rl=R·sinα2,Ot为目标的轴向中心点,ζ为相邻两激光束的夹角,θ为激光入射角。
受水体环境和激光接收器灵敏度的影响,即使扫描激光照射到目标也不一定收到回波。此外,水下目标为了提高航行隐蔽性和航行速度通常会在表面涂抹消声涂层和减阻涂层,经过大量实验表明[10]:文献[17]中的六参数双向反射分布函数(BRDF)可准确的模拟涂层的反射特性。在非同轴系统中,激光发射中心与激光接收中心的距离dOreOtr远小于引信的有效探测距离,则可近似认为激光入射角θ和反射角θre相等。则该六参数BRDF函数可化简为
(17)
式中:kb、kr、kd、kc为经验参数。由(17)式得θ=90°时fr(θ)=0,即扫描激光刚好扫到目标边缘时无法产生回波光束。故以此为边界条件得出的最低脉冲频率在实际情况下不能保证目标被扫描到。
由于激光的高准直度和小束散角,照射到目标上的光斑可近似认为是圆形,则目标的激光雷达散射截面[18]为
(18)
式中:目标处光斑半径rt=r0·eεR/2,r0为激光束初始半径,ε为激光在海水中的衰减系数,反映了海水的浑浊程度。综上可计算出目标回波功率方程为
(19)
式中:P0为激光器的发射功率;rr为激光接收窗口半径;η0为扫描系统光学总透过率;exp(-2εR)为海水总透过率。受激光接收器灵敏度影响,当P≥5 μW时才能收到回波[19]。故令P=5 μW可求出最大激光入射角θmax,则最低脉冲频率为
(20)
引信在实际探测中至少需要通过3个探测点的回波信息才能求解出目标的运动速度并与既定目标的速度范围进行比较,从而实现真伪辨别[20]。为保证激光接收器至少能收到三束回波光束,则引信的最佳脉冲频率应为fpmin的2倍。
2.4 通光时间
本文所述小开口激光引信为单激光器,为保证在探测范围内得到充足的回波能量,本文采用各扫描单元轮流扫描的通光方案。开始探测时单个扫描周期内每个扫描单元默认的通光时间为
(21)
因引信与待探测目标的交会时间很短,则判断:若引信的某个扫描单元获得超过弹目交会时间一个数量级以上的长持续回波信号,且引信中其他探测体制没有触发,即认为引信疑似遇到海底等背景区域。此时应充分利用激光能量探测非背景区域,则一个扫描周期内在非背景区域的扫描单元通光时间为
(22)
式中:n为引信全部扫描单元的个数;m为在非背景区域中扫描单元的个数,具体判断流程如图12所示。

图12 各扫描单元通光时间的判断流程Fig.12 Process for determining the scanning time of each scanning unit
3 仿真分析
3.1 参数求解
引信以搭载在MK48鱼雷为例,其速度为 55 kn,半径为0.533 m,激光在近海的衰减系数ε为0.4,激光在远海的衰减系数ε为0.28,其他参数如表1所示。
由表1参数可知,引信在近海海水探测目标时的最佳扫描频率fs=56 r/s,最佳脉冲频率fp=5.7 kHz。 在其他条件不变的情况下改变目标到引信的距离R和激光在海水中的衰减系数ε,得到最佳脉冲频率如图13所示。

表1 仿真参数Table 1 Simulation parameters
图13 最低脉冲频率随目标距离变化关系图Fig.13 Relationship between minimum pulse frequency and target distance
由图13可知,目标距离引信越远、海水越浑浊,则最低脉冲频率越大。这是因为如图14所示,目标距离越远、海水越浑浊,回波光束在海水中的衰减越严重,获得相同回波能量所需的激光入射角越小。且当目标距离变远时相邻两激光束的距离变大,需要更小的ζ才能满足探测要求。

图14 θmax随目标距离变化关系图Fig.14 Relationship between θmax and target distance
在0~Rf范围内遍历Rt由(2)式得到nmin随Rt变化关系如图15所示。
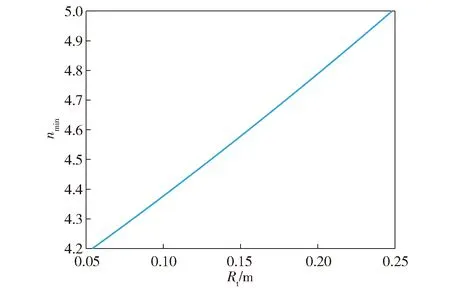
图15 nmin随Rt变化关系图Fig.15 Relationship between nmin and Rt
如图15所示,引信所需扫描单元个数n=5,此时δ=36°,tde=3.57 ms,max(Rt)=0.248 7 m。由于Rt与ηf呈指数变化,应在保证扫描单元有足够空间的基础上选择更大的Rt从而提升引信内部空间的可利用率。本文取Rt=0.2 m此时RA=2.2 m,RD=34.2 m,ηf≈0.56,可利用空间率与传统方案相比得到了很大提升。
3.2 回波能量分布
图11中单扫描单元发出的脉冲激光方程为

(23)

(24)
目标的表面方程为
(25)
联立(24)式、(25)式,可求解出所有目标表面的激光照射点[xi,yi,zi]T(i=1,2,…,k)。则脉冲激光束照射到目标表面的入射角θi为
(26)
式中:〈·〉表示两向量的夹角。把(26)式代入(19)式,可求出照射到目标的每一条光束回波能量Pi,则目标在穿过扫描光场的过程中收到的总回波能量为
(27)
为模拟真实扫描情况,目标处于不同的姿态时φ重新取(-45°~45°)之间的随机数,则弹目在不同相遇姿态下引信收到的回波能量分布如图16所示。

图16 回波能量分布Fig.16 Echo energy distribution
虽然在φ不断变化的情况下,回波能量分布出现一定的不均匀性,但整体出现一定的规律。如回波能量的峰值出现在目标姿态为θt=0 rad、ψt=π rad处即目标与引信迎头相遇的情况下。这是因为此时目标在扫描光场停留的时间最长,则照射到目标上的扫描光束最多,且此姿态下激光入射角较小,则总回波能量最大。
回波能量的最小值约为0.5 mW出现在目标姿态ψt接近于π/2 rad或3π/2 rad处,即目标相对于引信几乎呈垂直姿态交会,如图17所示。图17中θi为光束入射角。
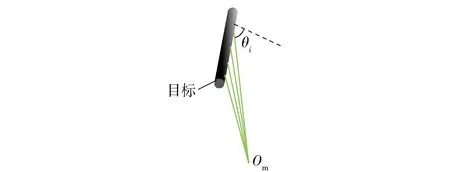
图17 目标呈大倾角姿态扫描示意图Fig.17 Schematic diagram of scanning with a large inclination attitude
此时激光入射角非常接近90°且目标在扫描光场的停留时间较短,故回波能量最小。综上所述,小开口激光引信工作在近海海域时,在弹目的不同交会姿态下所取得的回波信号远大于系统的探测阈值,不存在探测盲点。
4 结论
本文提出的理论模型不仅适用于所述的小开口激光引信,而且对于其他采用周视扫描方案的激光引信也具有一定的参考价值。得出主要结论如下:
1)针对传统方案中所存在的空间利用率低、扇形扫描盲区和由于激光器能量被大量分散而造成的探测距离缩短等问题,提出了一种小开口、五个扫描单元级联的水下激光近炸引信。采用十片小型透光玻璃,实现了透光窗口的小型化,提高了水下激光引信的整体强度和密封性,避免了加强筋带来的扫描盲区。激光发射与接收均采用棱锥形反射棱镜,实现了激光在扫描单元内的往复扫描,提高了激光能量利用率。
2)建立了高长径比目标在引信扫描光场中的停留时间模型,发现最低扫描频率并非出现在弹目迎头相遇的交会情况下,而始终在目标相对于扫描光线平行运动的姿态下;结合六参数BRDF函数分析得出:当扫描光束恰好扫描到目标边缘时无法得到回波信号。通过建立目标回波功率方程得到了以引信恰好收到回波信号为边界条件的最低脉冲频率计算模型,并得出了引信的最佳脉冲频率。
3)建立了弹目在不同交会姿态下的回波能量分布模型,得到了当目标相对于引信几乎呈垂直姿态交会时引信所收到的回波信号能量最微弱。通过仿真分析可知:文中所述小开口激光引信满足弹目在各种交会姿态下的探测需求。
本文提出的引信设计方案还处于理论阶段,后续工作将围绕原理样机的研制进行开展,待做出原理样机之后对理论模型进行实验验证。
猜你喜欢
阅读(科学探秘)(2022年5期)2022-06-07
奥秘(2021年3期)2021-04-12
兵器装备工程学报(2020年2期)2020-03-23
科学(2020年5期)2020-01-05
当代水产(2019年1期)2019-05-16
光学仪器(2017年1期)2017-04-10
太空探索(2016年9期)2016-07-12
红领巾·探索(2014年1期)2015-03-16
汽车维护与修理(2015年6期)2015-02-28
创业家(2015年1期)2015-02-27