用于自主导航的SAR/多普勒雷达一体化技术设计
2023-01-05 12:56戴宗武张少甫刘乃强胡月王喆段岑薇孙宇哲
兵工学报 2022年12期
戴宗武, 张少甫, 刘乃强, 胡月, 王喆, 段岑薇, 孙宇哲
(航天恒星科技有限公司, 北京 100095)
0 引言
随着科学技术的飞速发展,无线电导航的发明和使用在导航领域具有划时代的意义,导航系统主要分为4类[1]:陆基无线电导航系统、自主式导航系统、卫星导航系统和地形辅助导航系统。其中陆基无线电导航系统在海上或远距离难以发挥作用;卫星导航存在信号发射功率低、穿透能力差等固有弱点,信号无法到达室内、地下、水下、城市等遮蔽环境,而且容易受干扰,在高强度对抗的现代战场环境中,卫星和地面站等核心设施也容易被摧毁,防护能力弱。在此背景下,各国均意识到要重视发展不依赖卫星的自主导航技术。自主导航,是指不依赖任何外界电子信号,仅依靠自身探测与计算的导航制导,获得精确的载体位置,最终达到特定战术目标的导航方式[2]。
多普勒雷达[2-5]作为完全自主的全天候系统,不依赖地面站或者卫星发射机,各种气象条件均可工作。其利用电磁波多普勒效应,能够准确测量载体的三维速度、平均速度,测速精度高、导航数据更新率高,同时由于雷达波束很窄,且以接近垂直角度指向地面,发射功率小且不易被探测,很难对其进行欺骗和干扰,因而隐蔽性和抗干扰性好[6-8]。
因此,惯性导航(简称惯导)系统(INS)/多普勒组合导航系统[9-11]作为一种不依赖于任何外界资源配合的完全自主式组合导航系统[12-15],利用多普勒雷达测出的地速与惯导系统进行速度综合,能有效提高导航精度和系统抗干扰性。但由于它是一种速度综合,只能减小位置误差随时间增长的速度,并不能改变位置误差随时间增长的基本性质。因此,为提高位置精度,需要进行位置组合。
景象匹配辅助导航系统[16-17]通过即时获得的图像信息与载体景象信息进行比较和辨识,即可给出载体精确位置信息,常用的图像传感器有红外传感器、可见光传感器、合成孔径雷达(SAR)等,其中SAR更具有全天候、精度高、自主性强等优越性。另外,随着载体对安装尺寸、重量和成本等方面的严格限制,以及系统在集成化方面的需求,在一种产品上尽可能实现较多的功能将是发展方向。
因此本文提出的一种用于自主导航的高精度测速及SAR成像一体化技术,具有精度高、集成度高、天线口径小、体积小的优势。
1 基本原理
1.1 多普勒高精度测速原理
多普勒雷达的工作原理是建立在多普勒效应基础上的,当发射天线和接收天线存在相对运动时,就产生了多普勒频移,其大小与相对径向速度呈比例,测量出频移就可以得出相对速度。多普勒测速雷达安装于载体下方,且天线纵轴与载体的纵向基准轴重合或平行,对地面辐射电磁波能量,雷达接收到地面的回波进行处理和速度解算。
多普勒雷达按照波束配置分为单波束、二波束、三波束、四波束多普勒测速雷达[18]。由于单波束多普勒雷达具有由垂直速度引起的误差严重这一重要缺点,因而在实践中并没有得到使用。在实践中得到广泛使用的是能消除上述缺点的二波束、三波束、四波束多普勒测速雷达。因此通过设置多波束,可以得到雷达载体速度矢量的各个分量,即沿着航向的纵向速度、与航向垂直的横向速度和垂直速度。典型四波束配置方法如图1所示。
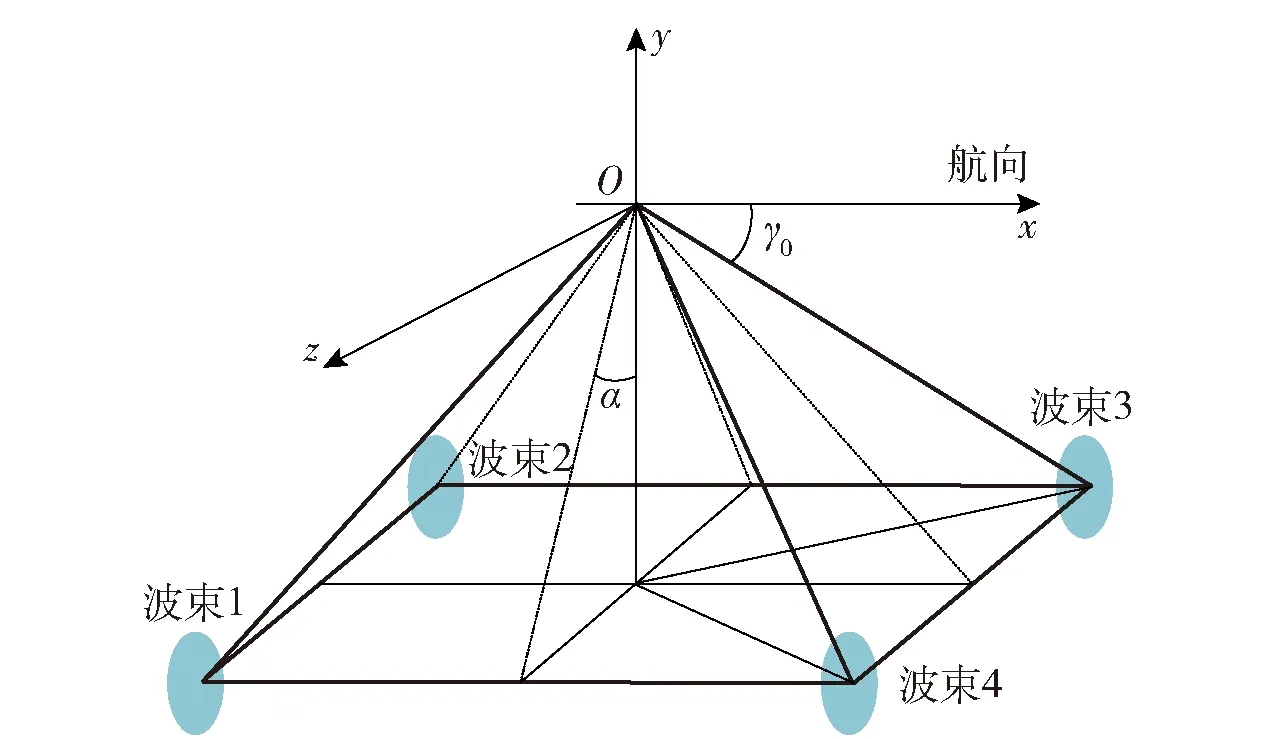
图1 四波束多普勒雷达波束配置图Fig.1 Four-beam Doppler radar beam configuration diagram
图1中,γ0为波束中心线与x轴的夹角,α为波束线在Oyz平面的投影与y轴的夹角。各波束多普勒频率与速度、波束角度关系如下:
(1)
(2)
(3)

(4)
式中:fdi为波束i的回波多普勒频率,i=1~4;λ为信号波长;vx为前向速度;vy为垂向速度;vz为侧向速度。工程中设置4个波束的αi相等,求解飞行器的三维速度如下:
(5)
(6)
(7)
目前国外研制的典型多普勒雷达主要有美国瑞安公司生产的AN/APN-230、英国BAE公司生产的AN/ASN-128、加拿大马可尼公司生产的AN/APN-208(V)、CMA-2012和意大利Leonardo公司生产的ANV-353等,其前向测速精度可到0.30%~0.25%左右;国内典型产品有782厂研制生产的7系列多普勒导航雷达,及中国航空无线电电子研究所早期参与研制生产的205型多普勒导航雷达,7系列测速精度已达到国外同系列水平。将多普勒雷达测速的高精度特性应用于自主导航系统中,提升自主导航的精度。
1.2 SAR成像原理
SAR的基本原理是:飞行器在飞行中,于不同位置定时地对同一地物发射电磁波脉冲信号,同时接收回波信号。由于SAR还具有全天时、全天候、不受大气传播和气候影响、穿透力强等优点,因此在民事和军事方面的应用非常广泛。
SAR一般都安装在运动平台上,匀速向前移动,以某个固定频率不断地向平台侧方发射脉冲信号并接收目标反射的回波,对回波进行相参处理后可获得目标的高分辨图像。SAR发射大时间带宽积脉冲信号,利用脉冲压缩技术实现距离向高分辨,SAR平台运动可以合成大孔径的等效阵列天线,从而获得方位向高分辨。
SAR实时获取的目标图像与飞行器中存储的参考图像(光学图像或者以前获取的SAR图像)相关,可以获取飞行器的位置更新,位置精度可以达到一个SAR图像像素分辨率或更低。
考虑到多普勒雷达天线与弹体采用刚性连接,在利用多普勒雷达天线进行SAR成像时不具备相应的天线伺服系统,无法精确控制波束指向,使得成像过程中存在平台转动误差,会影响成像聚焦深度及成像位置精度;同时考虑到实际飞行时,复杂运动相对于理想运动存在运动误差,会影响SAR成像方位高分辨率,这些误差都会影响成像精度,进而影响匹配精度[19]。文献[20]中分析了平台转动会影响方位聚焦和改变目标方位位置,但未提出改进的成像算法。文献[21]利用四元数姿态变换矩阵分析姿态角误差对SAR成像的影响,提出了可利用捷联矩阵进行实时修正的思路。文献[22]在假设天线与平台相对独立的前提下,重点分析了平台平动误差对瞬时斜距的影响,提出了非线性调频变标(NCS)算法,对径向加速度进行补偿。文献[23]重点分析了运动误差对二维空变性的影响,提出基于距离多普勒(RD)算法的分块补偿改进算法。本文利用多普勒雷达/惯导的高精度特性,实现对刚体平台SAR成像的实时补偿修正,以解决上述刚体平台SAR成像的转动误差及平动误差所带来的问题。
2 一体化设计
2.1 系统组成
SAR/多普勒雷达一体化系统主要由天线分机、综合信道、信号处理分系统组成(见图2)。其中天线分机由天线罩及测速/SAR成像天线组成,用于辐射和接收测速/SAR雷达的射频信号。SAR成像时的波束指向可复用测速天线的任意一个波束,根据待匹配区域的位置选择或切换波束。综合信道实现高质量的线性调频信号或简单脉冲信号的产生、放大、输出功能,实现回波信号低噪声放大、混频,中频信号的初步放大等功能;实现波束通道切换功能;实现测速时的窄带信号和SAR成像时的宽带信号切换功能;实现测速时的低功率和SAR成像时的高功率切换功能。信号处理分系统硬件共用,通过软件动态切换,对回波信号进行相应的采样处理,进行速度信息解算或SAR成像处理。

图2 SAR/多普勒雷达一体化系统组成框图Fig.2 Block diagram of SAR/Doppler integrated radar system
本文系统以保持多普勒测速雷达性能指标不变为原则,设计复用多普勒测速雷达硬件平台。文献[24]仿真结论表明当匹配精度优于5 m时,方位向定位精度可达12 m,在工程实际中是可以接受的,故而通过重新设计波束指向及处理流程实现前斜视SAR成像功能,并设计SAR成像分辨率不大于3 m,以满足匹配精度优于5 m的使用需求。将此SAR图像应用于景象匹配,可获得较高的匹配定位精度,从而修正自主导航中的位置积累偏差,提升自主导航定位精度。
2.2 系统时序设计
为提升惯导系统速度输出精度,提升SAR成像质量,工作流程设计将SAR成像工作模式安排至多普勒测速模式后进行。与此考虑在有河流、桥梁、标志性建筑物位置利用多普勒雷达前后两对称波束对同一定位点进行两次成像,以此提升单一匹配导航点的定位成功概率,系统时序如图3所示。

图3 系统时序图Fig.3 System sequence diagram
2.3 波束角一体化设计
为满足自主导航测速精度的需求,本系统要求多普勒雷达测速精度小于0.2%。在此约束下进行一体化参数设计。
为实现测量载体实时三方向运动速度矢量,则至少需要三波束测量的多普勒频率。本方案设计使用成熟的对称四波束配置,其使用冗余波束对三波束多普勒测量结果进行验算及平均,提升多普勒测速系统测量可靠性。
本文系统设计的多普勒雷达要满足测速精度要求,波束角度设计为α=11°、γ0=67.5°。在此角度下设计4 000~6 500 m时SAR成像的斑马图,符合斑马图设计的脉冲重复频率(PRF)如表1所示。
由表1可以看出,在此波束角度下,随高度变化SAR成像的波形切换太过频繁,不满足工程要求。
所以本系统在满足多普勒雷达测速天线方向图设计及测速精度指标要求下,考虑SAR成像高度向

表1 PRF设计结果表Table 1 PRF design schemes
杂波遮挡的影响,波束角度一体化设计为:调整α由11°至41°,此时γ0由67.5°增大为72.2°,对应擦地角β由65°减小为46°。波束方位角φ由25°增大至72°。下面根据设计的各波束角度进行指标核算。
2.4 测速误差核算
按照一体化设计后的波束角度重新核算测速误差,结果如表2所示。
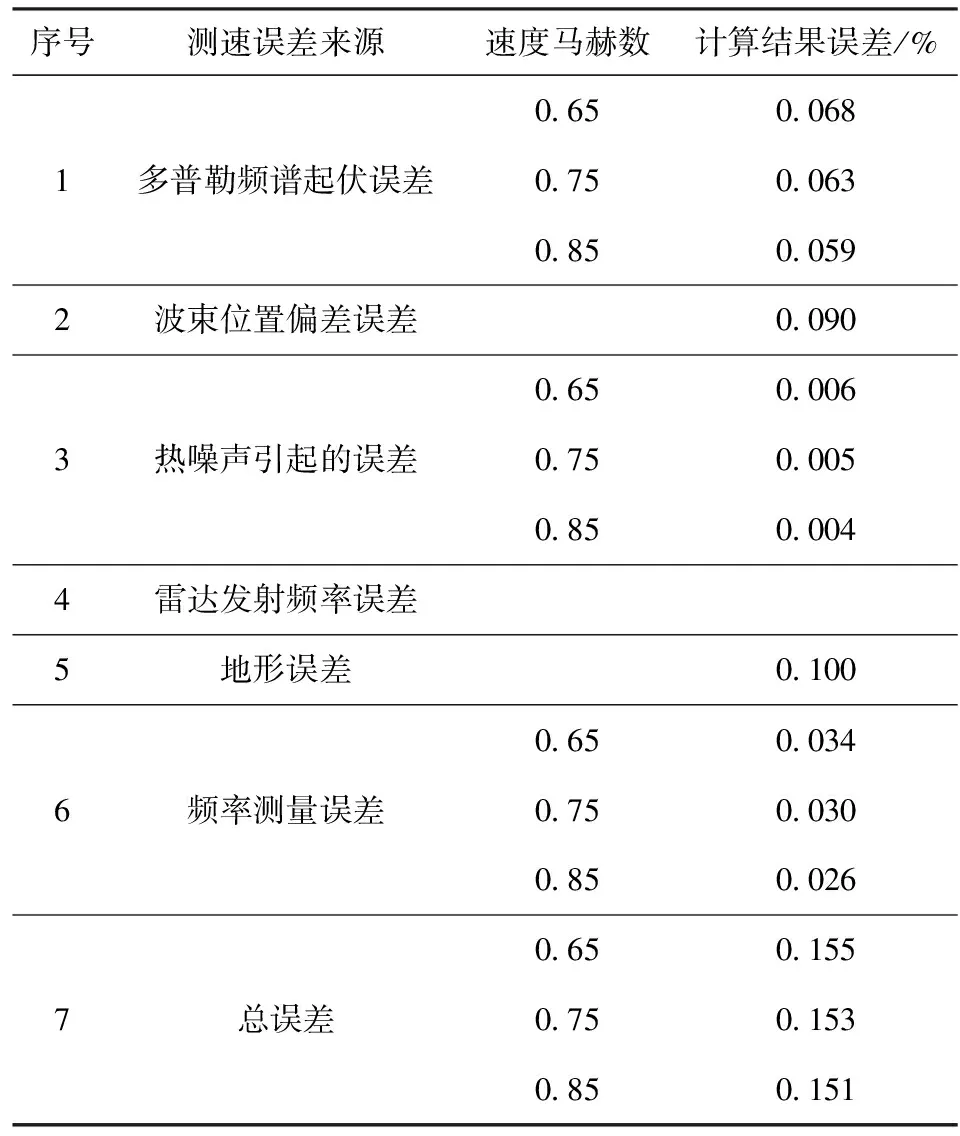
表2 测速误差核算表Table 2 Measurement errors
经过核算,SAR/多普勒雷达一体化系统的测速精度小于0.2%,可在自主导航过程中,利用多普勒雷达测速结果修正惯导随时间积累的速度,从而满足巡航段自主导航测速精度需求。
2.5 测速作用距离核算
当系统测速时,发射功率保持0.4 W不变,设计Ka频段天线增益30 dB,因入射角度变化估算后项散射系数由-14 dB变为-17 dB。因此入射角减小至46°中雨条件下仍适应5 000 m(雨区按照单程5 000 m考虑,与全程雨区结果相同)。
2.6 SAR成像作用距离核算
根据SAR成像雷达方程:
(8)


表3 SAR成像距离核算表Table 3 SAR imaging distances
2.7 SAR成像参数设计
擦地角46°依然较大,高度(5 000~6 500 m)时占空比需保持10%,虽通过斑马图设计(见图4)可躲避杂波,但由图4可见余量很小,当实际波束宽度或成像斜距稍发生变化时则会落入杂波区。因此将PRF设计较大取25 kHz,积累时间81.92 ms。
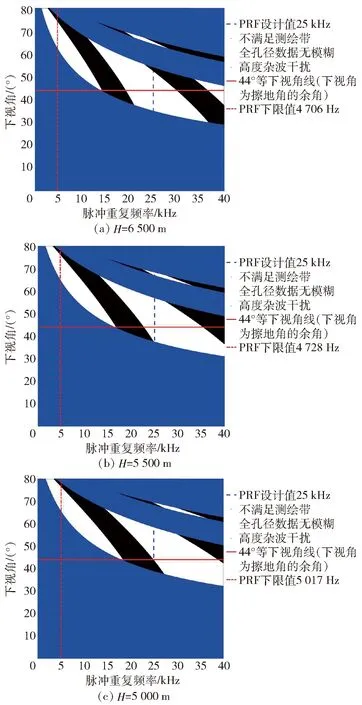
图4 SAR成像斑马图Fig.4 SAR imaging zebra map
同样设计中高度及低高度的斑马图,结论如下:中高度时(2 500~5 000 m)可通过减小发射至5%占空比降低高度杂波干扰,为兼顾尽量大的高度范围设计中高度重频20 kHz,积累时间102.4 ms。低高空(500~2 500 m)时保持重频20 kHz,占空比降低至1%即可适应至500 m,积累时间102.4 ms。
2.8 成像分辨率核算
2.8.1 距离向分辨率
为实现距离方向上的较高分辨率,SAR所采用的方法是发射线性调频LFM脉冲信号。无论是条带SAR还是聚束SAR,距离分辨率公式为
ρg=ρr/cosβ=arc/(2Bcosβ)
(9)
式中:ρg为距离分辨率;ρr为斜距分辨率;β为波束擦地角;ar为加权后分辨率的扩展因子;c为光速;B为发射信号带宽。设计擦地角度为46°,系统带宽150 MHz,即可得到3 m的地距分辨率,满足需求。
2.8.2 方位向分辨率
SAR成像方位分辨率由雷达参数及成像姿态角度共同决定,SAR成像方位分辨性能由前斜角度γ决定,在论证波束方位及弹体俯冲角度对成像效果的影响时需要计算(10)式:
sinγ=cosφ·cosβ·cosε+sinφ·sinβ
(10)
式中:φ为波束方位角;ε为弹体俯冲角度。
方位角越小时由于方位向与距离向不再正交导致图像畸变增大,且回波信号的二维耦合将导致方位分辨性能降低。根据自主导航定位精度需求,SAR成像分辨率需不大于3 m×3 m,以18°的成像前斜角结合不同高度下的成像参数为例进行计算,方位分辨率随高度变化如表4所示。
3 一体化平台SAR成像运动误差补偿仿真结果
针对1.2节提到的平台运动误差对SAR成像聚焦深度及成像位置精度存在影响,在此提出一种
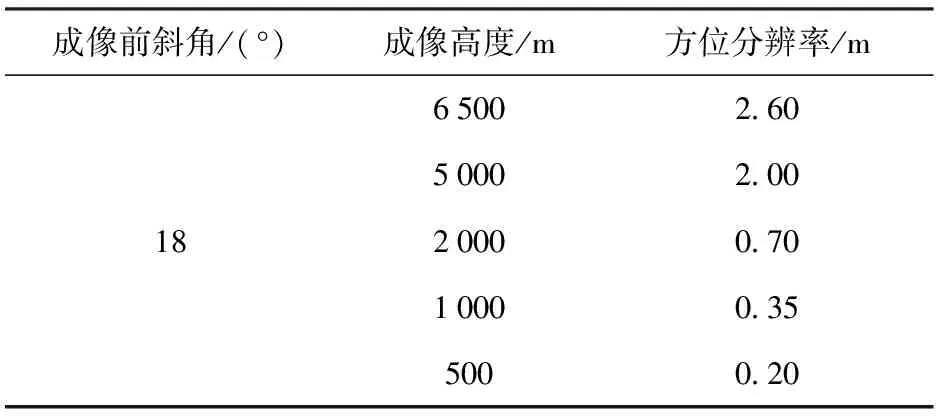
表4 方位分辨率随高度变化Table 4 Azimuth resolution versus altitude
基于刚体平台的SAR成像运动补偿算法,即利用多普勒雷达高精度速度信息及惯导瞬时高精度特性,对SAR成像运动误差进行补偿。
运动平台SAR斜距模型:
R(ta,Rr)=
(11)
式中:ta为方位采样点时刻;Rr为最短斜距;(vx,vy,vz)为3方向速度;tn为中心时刻;h为平台高度。对斜距模型进行泰勒展开,可得4阶模型为
(12)
式中:
(13)
R4th(ta;Rr)为R(ta,Rr)的4阶泰勒展开。
由于运动导致的斜距变化,利用惯导实时3方向速度、加速度及三轴姿态角求取运动误差带来的斜距误差。由于惯导数据输出速率低,需要对其输出信息按PRF进行插值,对插值结果进行积分,得到斜距补偿参数RINS,同时对回波进行距离向走动校正与弯曲校正,消除距离运动对距离向压缩聚焦效果的影响。
斜距补偿因子:
(14)
走动校正因子:
(15)
弯曲校正因子:
H3(fr,fa)=
(16)
式中:fr为距离向采样点频率;fc为雷达载频;fa为方位向采样点频率;fdc为多普勒中心频率;Rref为参考点距离;
在对方位向上的处理上,考虑到方位多普勒受空变性的影响,利用频域相位滤波进行聚焦处理,提升系统聚焦性能。算法流程图如图5所示。

图5 算法流程图Fig.5 Flowchart of the algorithm
本节以飞行高度5 000 m,飞行速度0.65马赫并存在刚体运动误差为前提,对比常规CS(调频变标)算法SAR成像与本文算法的SAR成像结果。
对无运动误差时的SAR成像进行仿真,结果见图6,可得方位向分辨率为1.68 m,距离向为1.27 m,积分旁瓣比和峰值旁瓣比皆优于-20 dB,表明2.7节所设计的SAR成像参数是有效的,能满足系统对成像分辨率的需求。
存在运动误差时,利用CS算法进行SAR成像,仿真结果如图7所示,图像方位向分辨率为6.01 m,距离向和方位向积分旁瓣比和峰值旁瓣比皆不满足使用需求,表明当存在一定的运动误差时,原CS算法对偏离成像中心点的聚焦性能有限,无法在实际应用中使用,必须将平动误差与转动误差进行补偿。
利用基于刚体平台的SAR成像运动补偿算法进行刚体运动补偿后,仿真结果如图8所示,从中可 以看出距离横向分辨率优化到2.88 m,同时提高了3 m的系统需求。

图6 无运动误差时SAR成像结果Fig.6 SAR imaging results without motion errors
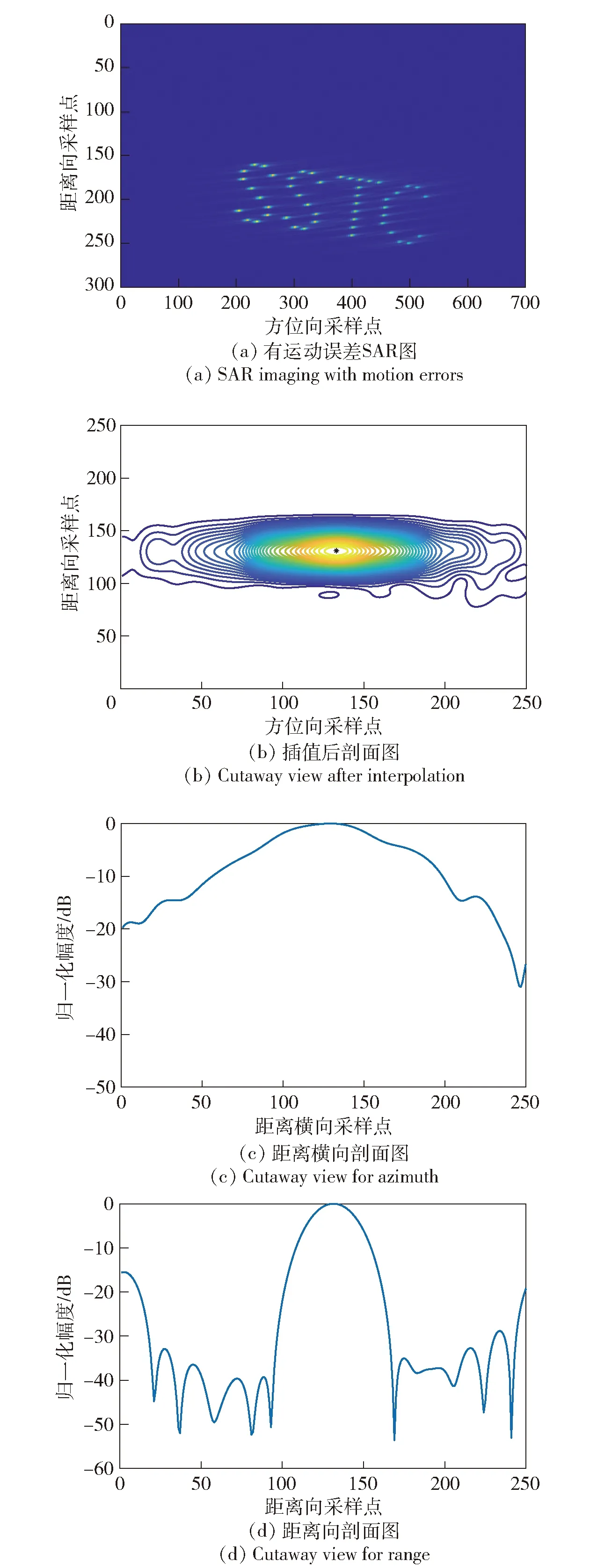
图7 有运动误差时SAR成像结果Fig.7 SAR imaging results with motion errors
图像自身聚焦深度,使得距离向和距离横向积分旁瓣比和峰值旁瓣比都优于-30 dB,满足分辨率小于

图8 补偿后SAR成像结果Fig.8 SAR imaging results after compensation
由图6~图8结果对比可知,在利用本文所提出的基于刚体平台的SAR成像运动补偿算法补偿有效,在一定程度上提升了图像质量,满足3 m×3 m的图像分辨率,满足文献[24]景象匹配的使用需求,用以修正自主导航中随时间积累的位置误差。
4 结论
本文设计的SAR成像与多普勒测速一体化雷达兼顾测速和SAR成像精度,方法有效,满足自主导航作战需求,并具有下述特点:
1)测速精度可达0.2%,经过运动补偿后的SAR成像可适应于一体化刚体平台。
2)成像分辨率优于3 m,满足5 m匹配精度的使用需求,可用于景象匹配以提升自主导航定位精度。
3)硬件平台上共用天线和信号处理单元,具有高集成度、体积小的优势。
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
幼儿园(2021年12期)2021-11-06
北京航空航天大学学报(2021年9期)2021-11-02
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
医学新知(2019年4期)2020-01-02
通信技术(2019年3期)2019-05-31
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
舰船科学技术(2015年8期)2015-02-27