
基于最优传播路径的EMA/EKF定位算法研究
2023-01-03 08:17盛孟刚陈洋卓张带凤龚巧婷
导航定位与授时 2022年6期
盛孟刚,娄 兴,陈洋卓,张带凤,龚巧婷
(湘潭大学自动化与电子信息学院,湖南 湘潭 411105)
0 引言
在实际生活中,人们对定位服务不再仅满足于室外定位,对于室内定位的需求也日益增长,因此室内定位技术也越来越受重视。蓝牙定位技术功耗低,定位所需基站数量较少,使其定位成本低廉,且定位精度高,更适用于室内定位。目前,蓝牙室内定位主要采用接收信号强度指示(Received Signal Str-ength Indicator,RSSI)[1]和到达角(Angle-of-Arri-val,AOA)[2]进行定位,随着蓝牙5.1协议的颁布,基于AOA定位方法使蓝牙定位系统精度从米级提高到分米级。
蓝牙AOA定位研究通常从基站布设和定位算法性能提升两方面进行分析。其中,在基站布设方面,采用AOA算法进行定位至少需要2个基站才能完成行人定位,而基站的分布会对定位精度产生影响,现已有部分学者对此问题进行了研究。文献[3]研究了基站分布对于定位精度的影响,对视距(Line-of-Sight,LOS)环境中基站的分布进行研究,该研究所提出的Y型基站分布模型信号覆盖率达88.6%,但该系统适用于室外定位,且定位所需基站较多,定位成本较高;文献[4]对天线阵列排列进行研究,通过消除基站天线阵列分布造成的误差从而提高定位精度,该方法二维定位精度为1.45m。在定位算法方面,文献[5]提出了一种使用硬件设备提高AOA精度的方法,该方法测试误差达0.19°,但定位所使用的硬件设备成本较高;文献[6]提出了一种用于低功耗蓝牙定位的高精度AOA估计算法,该算法考虑载波频率偏移(Carrier Frequency Offset,CFO),AOA平均测量误差为5°,但该方法并未考虑非视距(Non-Line-of-Sight,NLOS)影响;文献[7]对基于相位差的AOA定位算法进行研究,AOA平均测试误差达1.9°,该方法有效提高了AOA测试精度,但只针对LOS情况下进行研究,并考虑NLOS对测试精度的影响;文献[2]为提高测量角度的准确性,采用卡尔曼滤波器和高斯滤波器对原始I/Q采样信息进行处理,减少由NLOS造成的多径、噪声等影响,通过非线性最小二乘算法进行拟合,最终得到角度测量误差小于1°;文献[8]为消除无线信道对接收信号的影响,引入最小二乘算法、零迫等化器和快速傅里叶变换对I/Q采样信息进行处理,测量角度误差小于1°;文献[9]对角度测量值进行加权,增加了测量值准确度,平均定位误差低于0.23m,但定位过程中有出现位置跳变的情况;文献[10]使用MUSIC算法对角度测量值进行处理,融合定位误差小于2m。以上研究主要针对信号解析带来的误差,并未考虑NLOS范围与基站位置分布的关系对于定位精度的影响。
本文对基站安装位置与基站接收信号范围的关系进行研究,通过改变基站安装位置增加蓝牙信号视距接收范围。在此基础上提出了适用于室内环境下的蓝牙定位方法,通过基于蓝牙AOA的定位算法,提出了改进的指数移动平均(Exponential Moving Average,EMA)算法结合扩展卡尔曼滤波(Extended Kalman Filter,EKF)算法对室内行人进行定位。
1 基于遗传算法的最优基站几何分布
在有较多障碍物的定位场景中,如图1所示,考虑障碍物对蓝牙信号造成的遮挡,使蓝牙信号到达接收点前存在折射和反射等情况,出现信号多径传播,影响接收端接收信号的质量,使目标位置解算存在较大偏差。
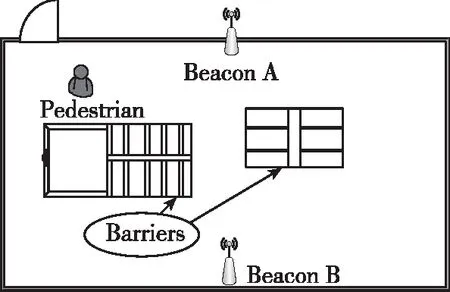
(a)室内基站安装俯视图
1.1 蓝牙基站布设位置与NLOS范围关系
使用天线阵列进行蓝牙信号接收,由文献[11]可知,蓝牙基站天线阵列接收范围存在30°较差区域,如图2(a)中角β所示,当待测目标处于该区域内时,无法对角度进行准确测量。当由于基站布设不合理导致室内部分区域处于该接收范围之内时,会影响蓝牙定位精度。若为提高定位精度加设定位基站,会导致定位成本增加。
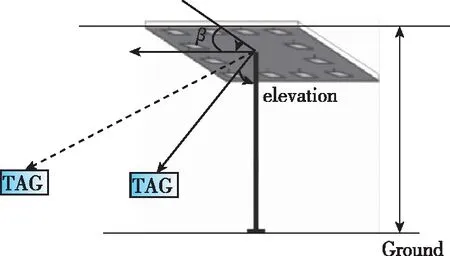
(a)基站天线示意图
当室内存在较少障碍物时,部分区域会受到弱NLOS影响,如图3所示。

图3 室内信号接收范围图Fig.3 Receiving range of indoor signal
根据图2(b)所示几何关系,则基站信号接收范围存在如下关系
(1)
其中,D为信号接收范围半径;H为基站安装高度。图2(b)中β=30°,则
C=H/sin(β)
(2)
即C=2H。
则式(1)可表示为
(3)
考虑单个障碍物对于基站接收信号范围的遮挡影响,如图4和图5所示,则NLOS区域范围大小与基站安装位置存在如下关系
(4)
其中,H为基站布设高度;h为障碍物高度;lx=|X-xi|为障碍物与基站间水平距离,xi为障碍物的X轴坐标;Jx为由障碍物产生的NLOS范围大小,对式(4)进行等式变换,则
(5)

图4 俯视图Fig.4 Top view

图5 障碍物造成NLOS范围大小Fig.5 Non-line-of-sight range caused by obstacles
假设室内存在N(N≥2)个障碍物,则由基站布设位置可得
(6)
即应使由基站布设产生的NLOS信号接收范围S为
(7)
其中,Jxi(i=1,2,…,N)为在二维区域中,第i个障碍物的遮挡产生的NLOS范围的高;bi(i=1,2,…,N)为第i个障碍物的长度。
同理可以推出Y轴方向上的障碍物所产生的NLOS范围大小为
(8)
其中,Jyi(i=1,2,…,N)为在二维区域中,第i个障碍物的遮挡产生的NLOS范围的高;ai(i=1,2,…,N)为第i个障碍物的宽度。
由以式(7)、式(8)可以得到室内环境下的NLOS范围的目标函数为
(9)
1.2 基于遗传算法的最优基站位置
有很多的优化方法可以对目标函数式(9)进行求解,本文选用遗传算法(Genetic Algorithm,GA)进行求解。
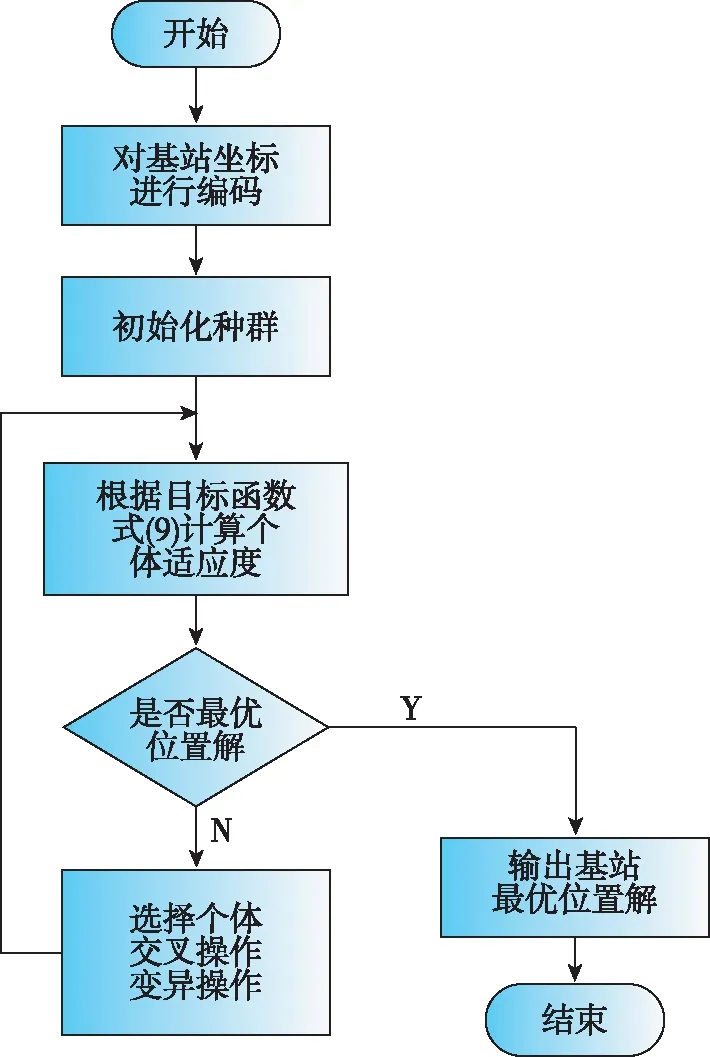
图6 遗传算法流程图Fig.6 Flow chart of genetic algorithm
遗传算法流程如图6所示,通过对基站坐标进行编码,使用目标函数式(9)进行适应度计算,经过个体选择、交叉、变异之后,得到基站优化二维坐标(X,Y),而通常室内蓝牙基站采用吸顶式安装,基站安装高度为室内空间高度,即Z=H。则可以确定基站的三维坐标(X,Y,Z)。
2 带阈值的EMA误差修正算法
针对行人行走规律,以文献[12]提供的身高为170cm男子步行数据为例,如图7所示,其中A、B、C点分别表示男子右脚抬起、右脚落地、左脚抬起的行走动作。步行平均速度为0.9193m/s,速度幅度变化为0.2m/s,角速度为7.954rad/s。两足支撑时间为0.4s,单足支撑时间为0.45s。
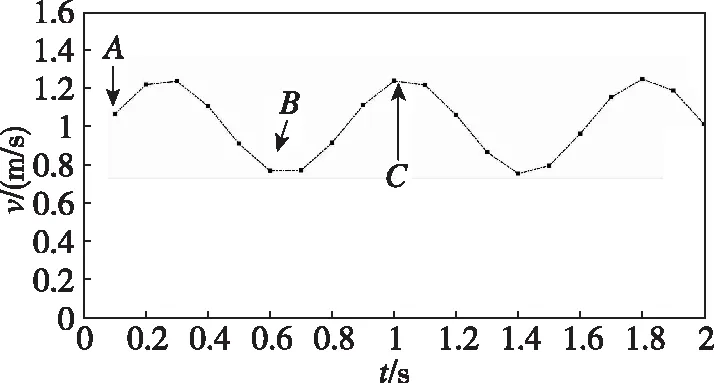
图7 170cm男子行走速度分布示意图Fig.7 Diagram of walking speed of a 170cm male
行人在室内的运动方向为随机事件,具体如图8(a)所示,圆心P表示行人上一时刻的位置,虚线代表行人可能行走的方向。从图8中可以看出,行人可以选择向任何方向前进,由于行人步长和上一时刻的位置P(xt-1,yt-1,zt-1)已知,如图8(b)所示,因此可以估计行人运动到下一位置与基站之间的夹角最大值φmax为
φmax=arcsin(d/BP)
(10)
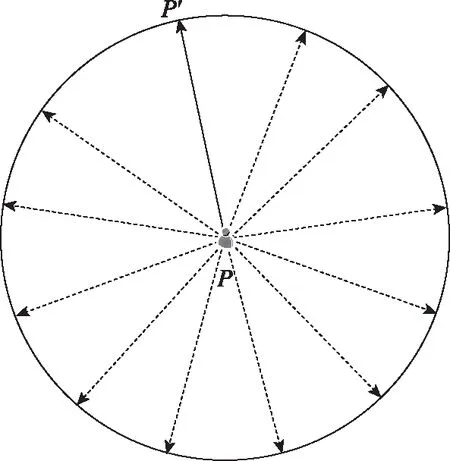
(a)行人运动方向示意图

(b)行人运动与基站之间形成夹角示意图图8 行人方向与基站夹角Fig.8 Angle between pedestrian movement direction and base station
为判断当前位置测量值的可靠性,将行人上一时刻位置P处的测量角度θt-1与当前位置的测量角度θt相减,与φmax进行比较,若两者之差值小于threshold(ε),表示当前测量值可信,用Y表示;当两者之差值大于threshold(ε),表示当前测量值具有较大偏差,用N表示,对当前测试点进行重采样,采用EMA算法更新该点测量值。
(11)
为消除测量偏差,本文对EMA算法进行改进,引入阈值对角度信息进行处理,根据行人在室内的运动轨迹判别该点测量值可信度,如式(11)所示。若该点的测量值不可信,表示该点与真实值之间存在较大偏差,将本次测量值舍弃,对该点进行重采样,采集n组测量数据,使用EMA算法进行处理,EMA算法具体如下:

(12)
(13)


(14)
其中,η为测量误差量,为高斯白噪声。
通过带阈值EMA算法处理后的测量数据更接近真实值,结合EKF算法估计目标位置,建立对应状态方程如下
(15)
(16)
(17)
其中,β1、β2、α1分别为基站1与基站2测量所得方向角、基站1测量所得俯仰角;(x,y,z)为待测目标位置坐标;(Xi,Yi,Zi)为第i个基站的坐标,其中(i=1,2…N,N≥2)。
建立对应观测矩阵H
(18)
其中

3 实验结果分析
3.1 基站分布对定位精度影响对比实验
本文采用的硬件设备如下:蓝牙芯片为nRF-52832,主控芯片为STM32F103C8T6,具体参数如表1所示。
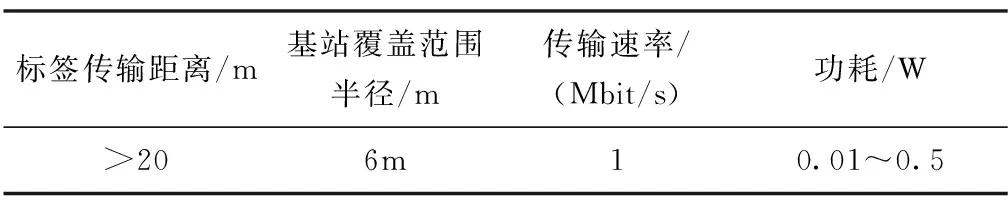
表1 蓝牙设备具体规格参数
针对基站分布对定位精度的影响进行研究,室内放置障碍物,如图8所示,障碍物参数如表2所示。
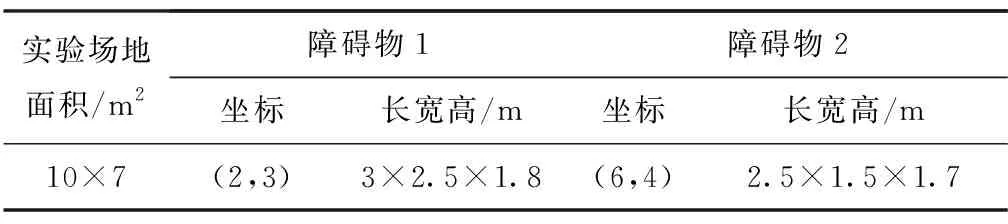
表2 实验场地参数表
其中,障碍坐标指障碍物离坐标原点最近的点的坐标,将以上参数代入式(9),使用遗传算法求取基站坐标,如图9所示。
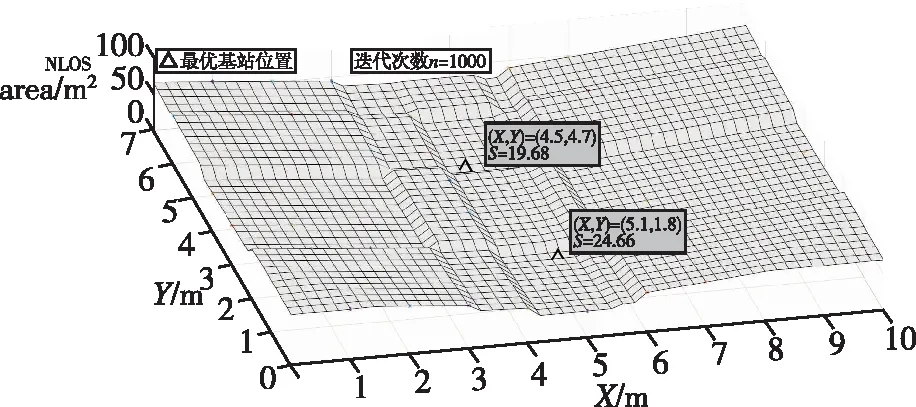
图9 遗传算法求得基站坐标图Fig.9 Base station coordinates obtained by genetic algorithm
为比较本方案的定位性能,进行不同基站安装对比实验,基站方案如表3所示。
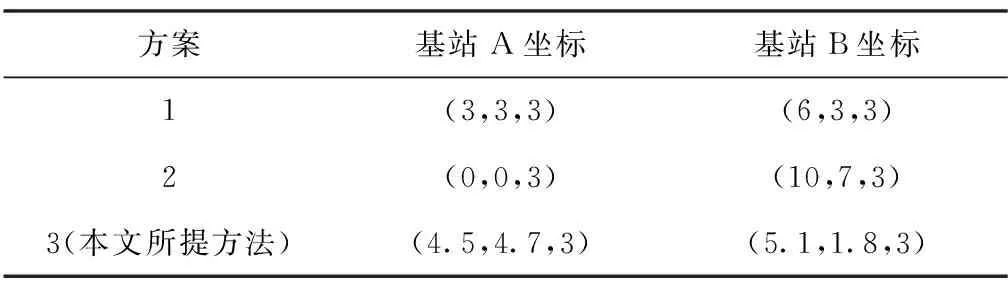
表3 三种基站位置坐标表
与表3相对应的基站安装如图10所示,其中,第三种基站布设方案为本文所提方法。

(a)方案1
取室内场景中7个测试点对三种基站分布方案分别进行实验,针对每个测试点,对2个基站所测角度误差进行平均,结果如图11所示。
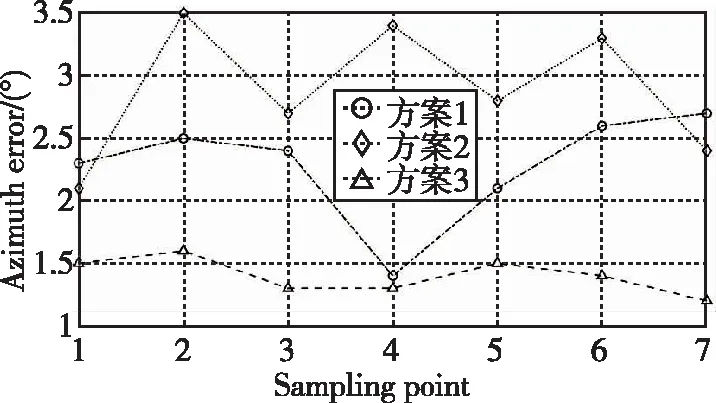
(a) 方位角误差对比
由图11可知,本文所提方法(方案3)的角度测量误差更小,说明在同等环境下,通过本文所提方法进行基站布设,能有效提高角度测量精度。对三种方案分别进行定位实验分析,采用基本的EKF算法进行定位,结果如表4所示。
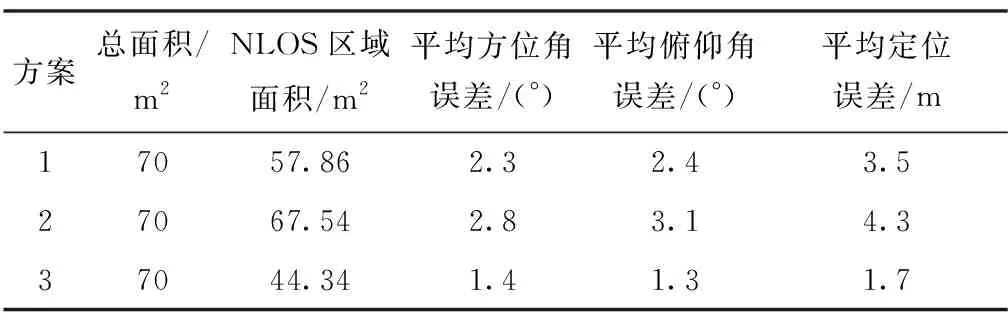
表4 不同基站布置方案测试结果对比表
由表4可知,在同样环境下,本文所提基站布设方案(方案3)NLOS区域为44.34m2,相较于方案1、方案2分别减少了23%、34%;本文所提方法的方位角平均测量误差为1.4°,相较于方案1、方案2分别减少了39%、50%;平均俯仰角测量误差为1.3°,相较于方案1、方案2分别减少了46%、58%。且从定位精度分析可知,同等工况下本文所提方法(方案3)的定位精度明显高于方案1、方案2,说明了本文所提基站布设方案能有效提高室内定位精度。
3.2 改进的EMA/EKF定位算法对比实验
结合本文所提基站布设方案,对本文提出的改进的EMA/EKF算法定位性能进行验证,实验场景为实际室内(10×7)m2的办公场景,如图12(a)所示。
在实验场景中,如图12(b)所示,室内有一条总长13m、宽1.8m 的过道,该过道有较多行人经过或逗留,行人平均身高175cm,采用本文第1章中提出的基站优化理论,解算出该场景下基站A、B的坐标如表5所示,然后进行EMA/EKF定位算法实验。

(a) 实际实验场景图
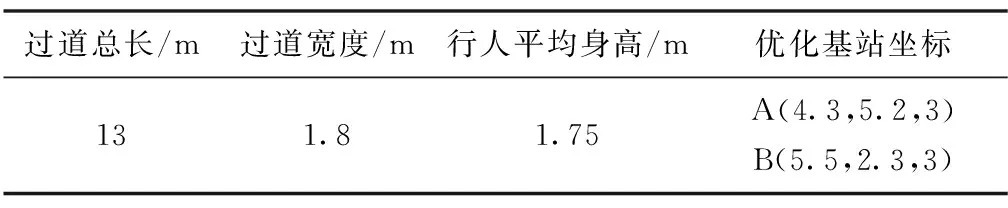
表5 办公场景下的基站优化分布
实验场景内有办公桌,并有行人在室内自由活动,身高170cm的男子在室内运动轨迹如图13所示,取threshold(ε)=φmax/2,该值为经验值,通过预实验获取。
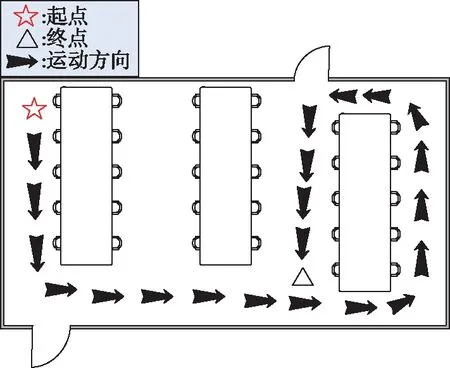
图13 运动轨迹图Fig.13 Motion trajectory diagram
从图14可以看出,本文所提算法定位轨迹更接近于真实的行走轨迹,特别是当待定位人员周围出现较多行人,对待定位人员发出的蓝牙信号产生遮挡时,使用EKF解算出的待定位行人位置出现较大偏差,轨迹出现较大的偏移,而本文所提方法能有效地抑制此偏差,提高定位精度。
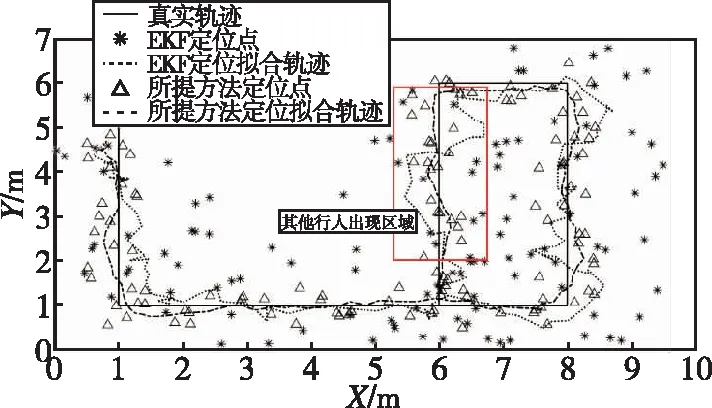
图14 本文所提方法定位轨迹与EKF算法定位轨迹对比Fig.14 Comparison between the positioning trajectory of the proposed method and that of EKF algorithm
将本文所提方法与EKF算法的定位误差进行对比,如图15所示,本文所提方法定位误差曲线低于EKF算法定位误差曲线,且使用EKF算法进行定位存在位置跳变的情况,而本文所提方法解决了这一问题。为进一步说明本文所提算法的有效性,自定义阈值检测率进行定位性能检验,定义如式(19)所示。
(19)
其中,T为总的测量次数;t为测量值超过阈值的次数。

图15 本文提出方法与EKF定位误差对比Fig.15 Comparison of positioning errors betweenthe proposed method and EKF
本文所提方法与EKF定位算法性能对比如表6所示。
如表6所示,本文所提方法的阈值检测率为76%,平均定位误差为0.89m,最大定位误差小于1m,定位性能优于EKF算法,说明了本文提出方法的有效性。

表6 本文所提算法定位性能分析表
4 结论
本文针对室内蓝牙定位易受障碍物遮挡等影响定位精度的问题,从两个方面进行研究以提高系统定位性能:1)通过对蓝牙基站布设位置与接收信号范围关系进行研究,根据室内环境优化基站的布设位置,增加基站信号视距接收范围;2)在基站优化的基础上,根据行人行走规律,提出了改进的EMA算法,结合EKF算法对室内环境中的行人位置进行解算,并对定位误差进行补偿,以提高系统定位性能。通过实验验证,本文提出的方法有效增加了基站信号接收覆盖范围,而且所提算法定位结果明显高于EKF算法,解决了采用EKF定位过程中出现的位置跳变问题,证明了所提方法的有效性。
猜你喜欢
工业设计(2022年7期)2022-08-12
导航定位学报(2021年4期)2021-08-29
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
好孩子画报(2019年10期)2019-01-10
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
雷达学报(2017年1期)2017-05-17
