
一种电梯对重安全钳提拉机构的设计计算
2022-12-28 11:21陈镜聪
中国新技术新产品 2022年19期
陈镜聪
(蒂升电梯(中国)有限公司,广东 中山 528400)
0 引言
电梯为人类的日常活动提供了便利,在改善人民的生活质量的基础上,也在不断地转变着对科技的认识。电梯限速系统——安全钳联动装置是电梯安全的关键设备之一。正是由于电梯使用频繁,对安全的需求越来越高,因此,预防电梯限速机构——安全钳联动装置就显得非常关键,必须对其故障原因进行剖析并处理,预防事故的发生。电梯的安全钳系统由安全钳和安全钳的提拉机构组成[1]。
电梯安全钳提拉机构是根据安全钳的形式以及电梯的轿架结构来设置的。一般来说,电梯的安全钳都是设置在电梯的井道中、电梯轿厢的下方或是下横梁的梁侧。而安全钳的牵引力又可以分成两种:一是向上的提拉力,二是下推式。上提拉力的应用比较普遍。但是如果不按照科学方法使用安全钳提拉结构,将导致电梯的安全钳制动作失灵,甚至造成电梯不能正常运行。所以,必须对安全钳的拉力加以统计与研究,以便给电梯安全钳提拉机构的设计提供必要的数据支撑[2]。
1 电梯安全部件的构成
1.1 电梯安全部件示意图
电梯上横梁上装有安全钳的简图如图1所示。许多电梯也会在下部横梁上安装牵引装置。两种不同的结构类型取决于其总体的结构和造价,但它们的作用大致相同。

图1 电梯安全部件示意图
放置于轿厢下部的安全钳提拉机构模型如图2所示,包括轿托,用来固定轿厢;弹簧和连接轿架直梁的成型角钢,稳固度较高;旋转杆、安全钳、限速器钢丝绳和连接杆。当限速器运转时,由钢索牵引旋转杆,旋转杆驱动安全钳,夹持电梯轨道。连动杆的作用是保证左、右安全钳的操作协调,以确保位于轿厢两侧的安全钳可以在同一时间夹住电梯导轨[3]。弹簧的作用是提供反作用力,防止在电梯起停过程中发生安全钳的错误操作,引发事故。

图2 安全钳提拉机构
1.2 电梯安全部件
1.2.1 限速器
在电梯的安全防护体系中,负责安全管理的核心部分是限速器。限速器发生故障会造成电梯坠楼。其他的安全防护装置失效时,安全钳与限速器就会发生联动反应,使电梯停止运行。按特性划分,限速器有两种类型。
具有惯性的限速器。其工作方式是由凸轮来驱动摇摆锤。随着摇摆锤的振幅和频率的增大,绳轮的转速逐渐逼近限定速度,这时摇摆锤就会触发限速器的安全开关,使电梯制停。
离心式限速器。其工作方式是利用连杆机构带动甩块和限速器共同旋转。当电梯的速度达到限定速度时,就会拉动安全钳,让升电梯停止运行。
电梯通常采用离心式的限速器,这种装置多数安装在机房内。其功能是在电梯超速的状态下,使安全电回路断开,并使限速钢索卡紧。DPTF和PTF是限速器控制系统中的关键指标。PTF动态提拉力指的是限速器在安全钳上施加的极限值,这个极限值是试验数据,也可见于该限速器的参数目录表。DPTF会随升降高度、速度等不同的电梯参数而变化。在PTF限速器运行中,安全钳提拉机构上最小的理论作用力受限速器摩擦力的影响力很大。PTF在安全钳的设计应用中非常重要,它会对整个安全钳提拉机构系统所需的提拉力进行校准,并确保设计符合标准[4]。
1.2.2 阻尼杆
阻尼杆是一种与限速器相连接、避免乘客等外部环境因素影响的设备,它能降低限速器的失效和错误操作。
1.2.3 安全钳
当电梯速度超出额定速度或悬挂绳出现断裂和松动时,由限速器控制的安全钳就会被启动,进而制停电梯。安全钳主要有两类,即瞬时式和渐进式。瞬时式安全钳由硬质夹具和高硬度、高摩擦系数的偏心块、钳或辊柱组成。为增加摩擦力,一般会将偏心块、钳或辊柱等的制动器零件进行轧花和硬化[5]。
渐进式安全钳是将弹簧放置在钳体和制动元件之间,有的安全钳直接利用其自身的弹性元件。制动时,凭借元件的弹性将制动力逐步增加或保持不变。应注意,其制动距离是由制动时安全钳启动的速度以及被制停电梯的质量决定的。
在电梯超速上升或下降时,安全钳是控制电梯的关键部件。当前的电梯采用的是瞬时安全钳和渐进安全钳,在升降机转速低于0.63m/s的情况下可以采用瞬时安全钳。在渐进式安全钳启动之后,轿厢的减速平均为0.2g~0.5g。
1.2.4 提拉机构
提拉机构是一种连接限速器与轿厢相,或者连接对重两端的安全钳的重要结构[6]。当限速器作用时,限制钢索将拉力传递至提拉机构,该提拉机构启动后,由连杆的主动侧和被动侧的安全钳对导轨接触面进行挤压,进而起到减缓电梯运行速度或者制动的作用。
1.2.5 张紧轮
张紧轮由一根钢索缠绕在限速器上,并连接到安全钳的连杆拉臂上,由自身的引力对钢丝绳进行持续拉伸,进而形成安全钳和限速器之间的连接。其功能包括限速器轮与钢丝绳之间产生更大的摩擦力;检验限速器是否松动或断裂,确保限速器及安全钳的可靠度[7]。
2 提拉机构的设计
安全钳的拉力机构主要是控制杠杆的尺寸和弹簧的选取。摇杆的尺寸可以按照轿厢的实际尺寸进行调整,并按验算的结果进行调整。选择弹簧是根据这两个主要的参量来选择的:一是初始状态时对安全钳提拉机构的拉力,二是提拉状态下弹簧在安全钳上的拉力[8]。以下分别给出初始状态FS和弹簧完全提拉状态下FS的计算方法,如图3和图4所示。
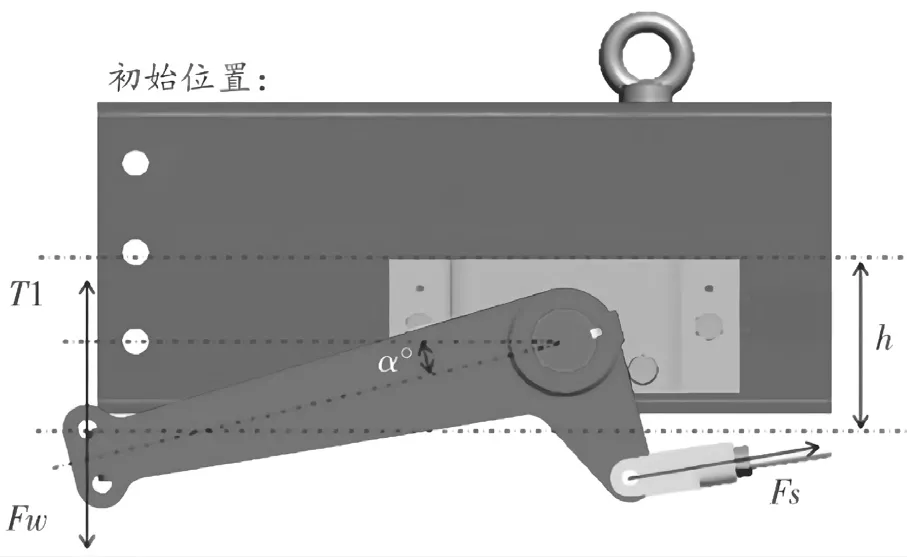
图3 提拉机构动作初始位置示意图

图4 提拉机构完全提拉示意图
提拉机构初始状态的计算如公式(1)和公式(2)所示。

安全钳提拉机构提拉状态下的受力公式如公式(3)和公式(4)所示。

式中:系统的惯性力用Ti表示;提拉杆的长臂的长度用固定值L表示;提拉机构初始状态中提拉杆臂长与水平方向的夹角用角α表示;提拉杆断臂的固定长度用P表示;安全钳和提拉杆的质量用Fw表示;连接杆上弹性元件对该体系所产生的弹力用Fs表示;限速器的提拉力用Fgov表示;安全钳提拉机构运行的最小行程用h表示。
安全钳运行的最小行程(参数表可查),Fgov必须满足公式(5)或公式(6)的条件。

PTF是限速器在安全钳上的最小理论静态张力,由限速器的参数表得到。
系统惯性力是Ti,解析如图5所示,由分析可得公式(7)。

图5 系统受力分析图

式中:电梯轿厢下降最大加速度是Acar=g(自由落体重力),-a(轿厢系统下降反力)=0.8×(理论计算值);限速器绳的质量是Mrope;限速器环的不平衡质量是Mimb(大多数系统为(0));限速器绳轮惯性力是Jgov;限速器绳轮半径是Rgov:长紧绳轮惯性力是Jtenshv;张紧轮半径是Rten(一般情况下等于限速器绳轮半径)。
3 安全钳提拉机构设计验证
3.1 弹簧的验证
假设弹簧在初始位置时的压缩量是(S-S1),当安全钳运行到最大行程时,弹簧达到的最大压缩量是(S-S2),由弹簧在两个位置的形变量运算得出弹力计算公式。那么,可以根据弹簧在两个位置的状态得到初始位置符合弹力公式(8)。

提拉位弹力置满足公式(9)。

式中:F为弹簧在初始位置的弹力大小;F '为弹簧在提拉位置的弹力;K为弹簧的弹力系数;∆S为弹簧的形变量。
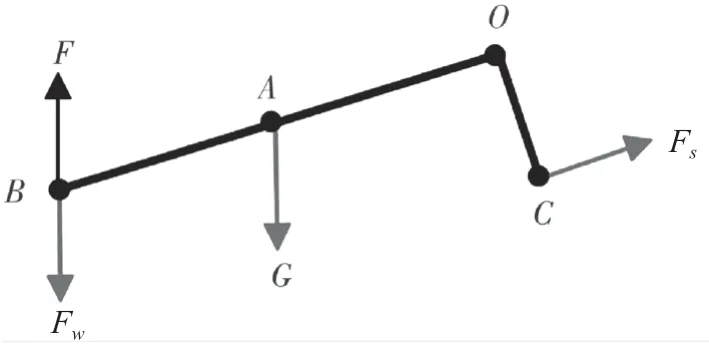
当上式满足Fs' 提拉机构的受力分析简化图示如图6所示。根据公式计算,可以得到在正常工作和受力条件下所受到的限速器提供的拉力F,也就是系统所要求的制动器所能承受的张力,如公式(10)所示。 图6 提拉机构受力分析图 式中:F为所受到的限速器提供的拉力;Fs为提拉机构在初始状态的拉力;α为提拉机构初始状态中提拉杆臂长与水平方向的夹角;G为提拉机构长臂OA两点向下的重力;Fw为安全钳和提拉杆的质量;OB为提拉机构长臂的长度。 当条件符合Ti 安全钳的提拉机构是确保电梯安全使用的一个关键环节,它必须确保在正常工作状态下不会触发保险钳,也就是说,当系统承受的力低于系统的惯性力时为安全状态,否则就会发生安全钳故障。当电梯超速时,系统将触发限速器与安全钳的联动装置,限制电梯运行速度,或者制停电梯,以保障乘客及电梯的安全性[9]。 同时,该文也着重强调了提拉系统的弹簧受力模型及弹簧的选择。弹簧的好坏直接决定主动侧安全钳和被动侧安全钳能否压紧轨道的接触表面。弹簧应力计算是其中的一个重要环节,希望能为设计者的设计工作提供参考。3.2 限速器验证

4 结论
猜你喜欢
中老年保健(2021年3期)2021-08-22航空发动机(2020年3期)2020-07-24中国特种设备安全(2019年4期)2019-05-20中国特种设备安全(2019年2期)2019-04-22时代英语·高二(2017年4期)2017-08-11天津体育学院学报(2016年3期)2016-12-18中国质量监管(2016年10期)2016-07-10现代工业经济和信息化(2016年7期)2016-05-17儿童故事画报(2013年3期)2013-06-24
