
电容式静力水准系统的研制及测试
2022-12-28 11:20李朝阳汤建军亓信同
中国新技术新产品 2022年19期
李朝阳 汤建军 亓信同 朱 瑞 孙 彬
(安徽创谱仪器科技有限公司,安徽 合肥 230088)
0 引言
静力水准系统是根据液体总是寻求等势面的水平原理监测若干不同位置之间的相对高程变化量的精密仪器,广泛应用于各项工程中。电容式静力水准系统是一种高精度高程测量系统[1],其测量精度、反应频率以及自动化程度比其他高程测量方法高,且适用于各种狭小的空间和恶劣环境[2]。该文面向大科学装置(例如高能粒子加速器中垂直位置变化的高精度监测需求)研制了电容式静力水准系统,并对其进行指标验证、标定试验以及在线长时间试验验证。
1 仪器介绍
该文介绍的电容式静力水准系统是从厚膜陶瓷电容传感器、测量与控制系统电子学和样机结构3个方面完成设计的,分为全浸式和半浸式,该文设计的全浸式和半浸式静力水准仪的设计结构图如图1所示。系统结构主要由上钵体、电容传感器和下钵体组成。上钵体主要由靶标球座、控制电路板、网口接口和电源等通信接口组成;中间是电容传感器及其采集电路;下钵体用于盛液位,主要由空气管和水管组成;最下方是用于固定的底座。
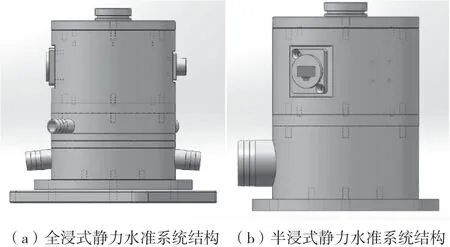
图1 静力水准系统结构
高精度电容式静力水准系统设计技术指标见表1。

表1 静力水准系统技术指标
2 离线测试
2.1 试验装置
该文研制的电容式静力水准系统的量程为±6.0 mm,期望最高精度为1 μm,作为测量系统的标定平台,应该拥有更高的精度、分辨力和量程。因此,该文设计了适用于静力水准系统的试验装置。测试试验装置由电容式静力水准系统、相同底面积的标定钵体、自研位移装置、连接水管、升降台和大理石平台共同组成,如图2所示。其中,自研位移装置具有60 mm的测量量程和1 μm的位移精度,满足测试试验的精度和量程要求。
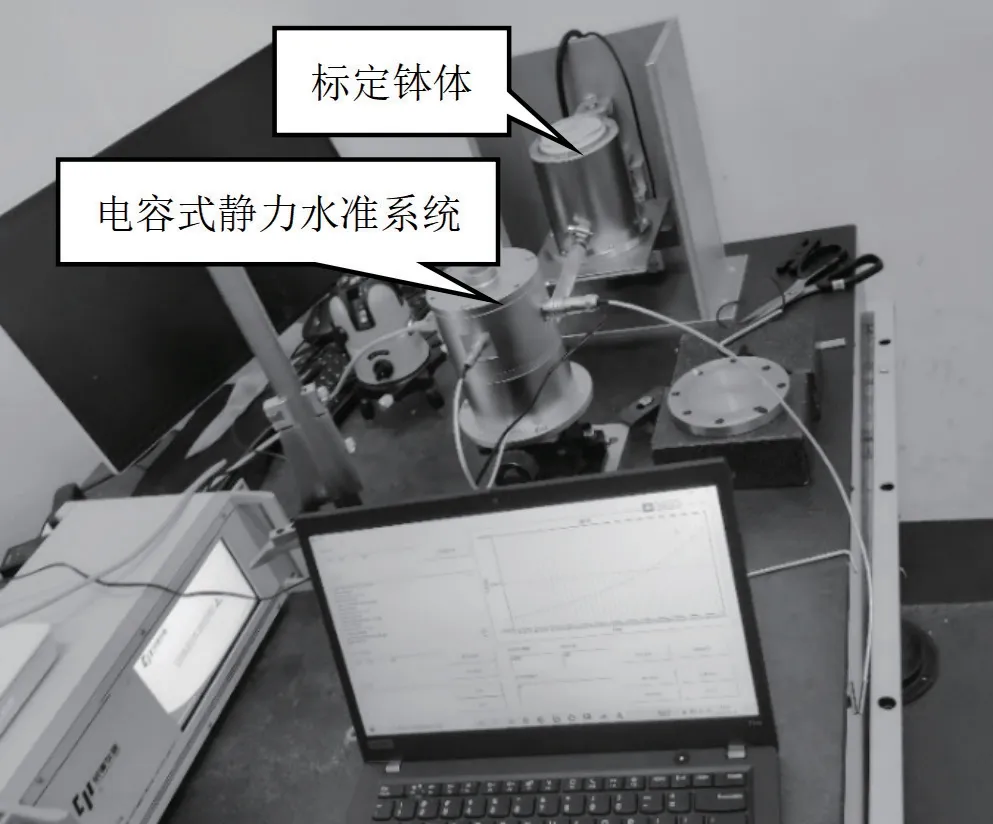
图2 测试试验装置
试验采用间接标定方法,共分为2个步骤:1) 利用自研位移装置产生∆H位移值,根据连通器原理,则静力水准系统中下钵体的液位变化为∆H/2。同时,利用基恩士激光位移传感器对液位量进行标定和验证。2) 将位移装置调节至不同的位移刻度,多次采集静力水准系统在不同位移刻度下的电容量数据,对其电容量数据进行标定。在完成上述2个步骤后,就可以得到1组标定后的对应电容—位移数据。
通过联通器原理在左、右液体容器内注入同一种液体,在同一大气压下,各位置液体压强相同,因此液面始终保持在同一水平面,通过改变相应钵体的高程并通过传感器测得液位变化。标定液位变化量原理如图3所示。
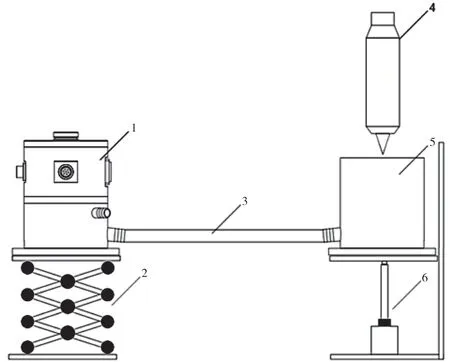
图3 标定液位变化量原理
为了验证静力水准系统的技术指标,该文基于测试试验装置进行分辨率试验、重复性试验、标定及线性度试验和长时间观测试验。
2.2 分辨率试验
由电容传感器间隙距离和电容值的公式可知,随着间隙距离不断变小,电容检测单位间隙位移变化的分辨率越来越高,该试验设置静力水准系统内液位以1 μm为间隙位移变化量,由+5.5 mm的初始位置上涨至+6.0 mm,反复试验多次,同步记录每个位移点对应的电容值。其中一组电容值随位移量变化图和局部放大图如图4所示,电容值呈阶梯式增长,符合公式规律,且满足分辨率为1 μm的要求。
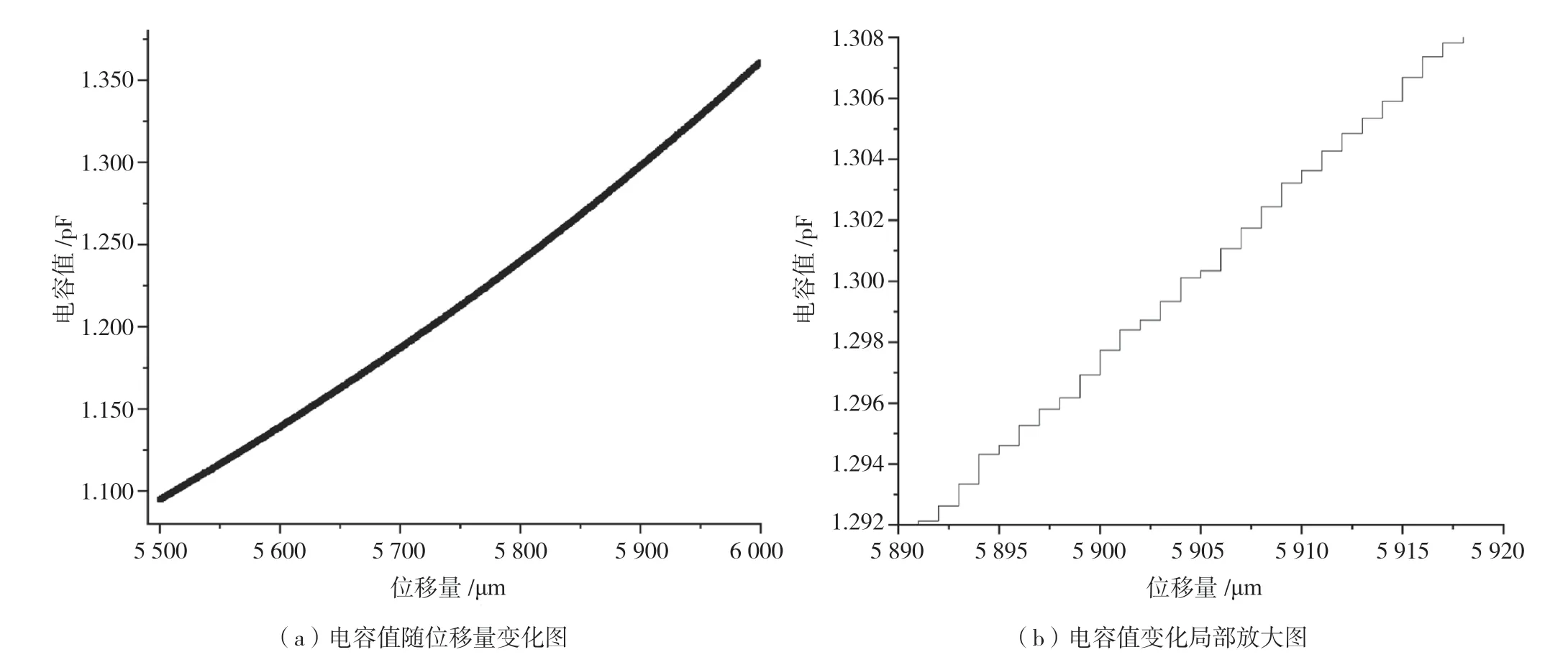
图4 电容值随位移量变化图及局部放大图
2.3 重复性试验
为了验证系统的重复性,使静力水准系统液位从+6.0 mm降至-6.0 mm,每次变化量为l.0 mm,记录测量结果,再使液位从-6.0 mm升至+6.0 mm,同样记录测量结果。在很短的时间内共进行了5次试验,测量数据平均值和极差如图5所示。
重复性试验测量的每个点数据均有跳动,这里归结为重复性误差。由图5可知,对重复性测量的每个点的平均值来说,其极差是很小的,最大点的偏差为0.26%。

图5 5次测量数据的平均值和极差
2.4 标定与线性度试验
标定试验中的系统以20 μm为液位步进变化量,使液位由+6.0 mm的初始位置降至-6.0 mm,同步记录每个位移点对应的电容值,电容值与位移量关系如图6所示(为全行程的电容与液位的拟合曲线)。
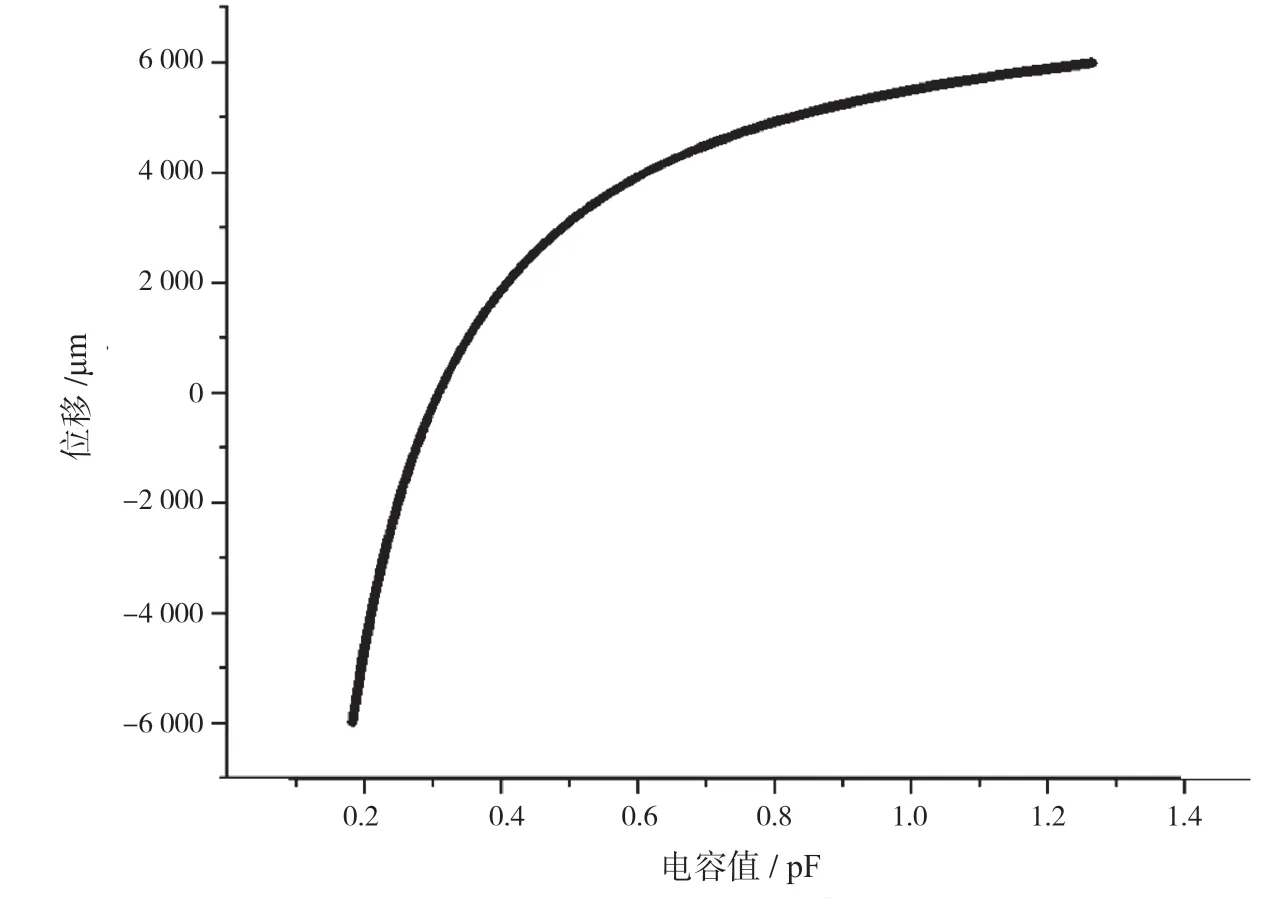
图6 电容与位移量关系曲线
对测量数据进行非线性曲线拟合[3],拟合曲线与标定误差如图7所示。
拟合非线性公式如公式(1)所示。

式中:y为液位高度;a、b、c和d为拟合后的常数;x为电容值。
拟合系数a=27677.3,b=-67744.3,c=-8.59993,d=-0.0296,曲线拟合的最大残差出现在-6 000 µm的位置,为25.12 µm,后期可采用分段拟合的方法进一步提高拟合精度。
静力水准线性度是测量系统输出位移值和标定位移值的最大偏差与满量程的百分比,其值越小,表明线性特性越好。将标定过后得到的4个系数(a、b、c和d)代入标定公式,当液位为+6.0 mm~-6.0 mm时,使钵体内液位每次变化为1.0 mm,将标定位移值与实际测量位移值进行数据对比。试验共进行10次测量,随机选取其中一次试验的对比数据与非线性误差分别如图8所示。

图8 测试数据图
由图7(b)可知,在同次试验中,系统在对应位移刻度下的非线性误差有所差异。在线性度试验的10次测量过程中,系统在不同测量中的同一位移刻度下的非线性误差也有所差异。其中,系统在±6.0 mm量程内的最大非线性误差为54.67 µm,线性度如公式(2)所示[4]。

图7 静力水准仪标定及精度数据分析图

式中:∆lmax为最大非线性误差;yFS为系统满量程输出。
由公式(2)可以得到测量系统的线性度约为0.45%。
2.5 长时间监测试验
静力水准系统进行长时间监测试验,在钵体内将水大约加至+500 µm的位置,保持其他测量条件不变,对该位置的液位值和温度值进行持续测量,每间隔5 min读取1次,观测36 h的结果如图9所示。
图9中的液位波动极值为29.37 µm,与温度变化趋势一致。因此,液位波动与温度变化密切相关,须加入温度补偿[1]。
该文研制的电容式静力水准系统在每个钵体中都安装了PT100温度传感器,系统同时采集液位值和钵体对应的温度值,利用温度补偿公式对监测液位进行修正,消除温度干扰因素,进一步提高精度[5]。对长期监测结果进行温度补偿,校正前后液位对例如图9所示。由图9可知,校正后液位波动明显变小,极差为14.82 µm,由于去离子水长时间存在蒸发现象,因此水位呈下降趋势。
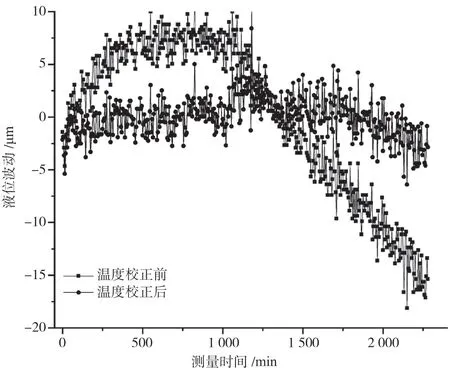
图9 静力水准温度矫正算法的长时间监测数据图
3 在线测试
将研制的测量系统安装在设备现场进行长时间测试,并对测试数据进行对比。在试验中,0#和1#为一组,固定在设备上进行测试,而2#和3#固定在光学平台上进行测试,连续测试12 h,再对比测试结果。
系统在线安装在散列中子源准直实验室中,安装结构示意图及现场安装实景图如图10所示。
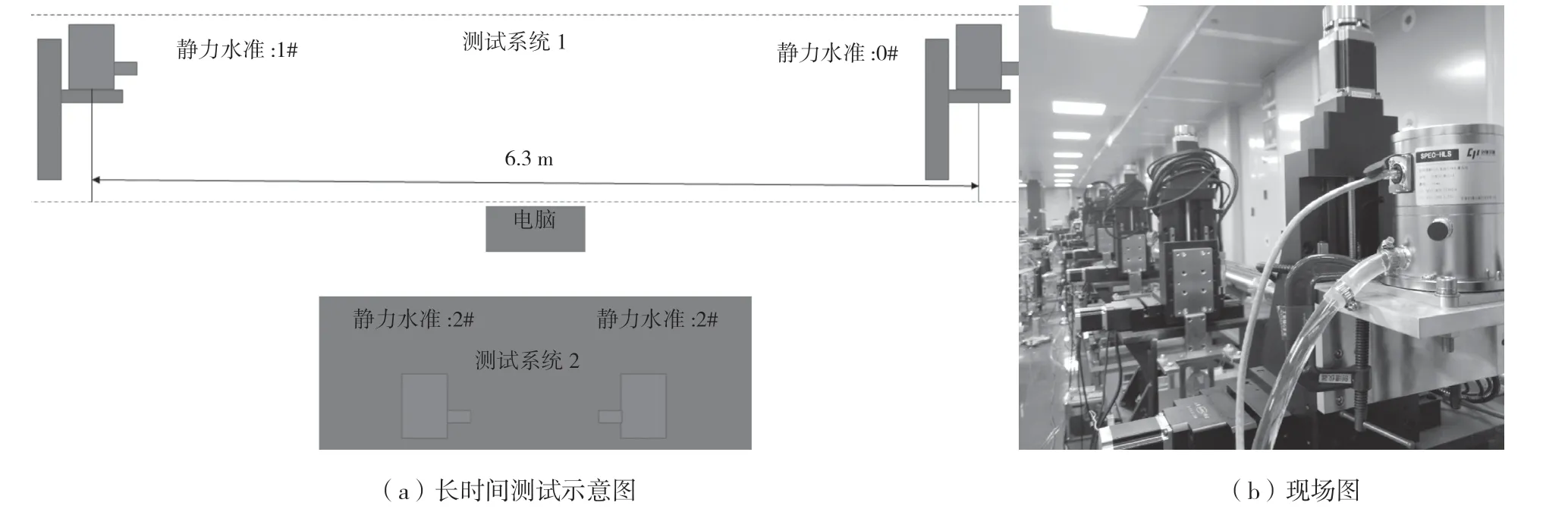
图10 散列中子源现场测试图
长时间测试结果如图11所示,图11(a)为原始数据,1#和2#固定在悬臂机构上,随温度的变化,系统相对位置也会发生变化。而0#和3#固定在光学平台上,随温度的变化,系统相对位置固定不变,结果和实际测量数据非常温和。

图11 数据处理对比图
对原始数据进行本底数据校正,矫正后的本底数据可以消除因环境变化因素而导致的测量位置偏差,可以将校正过后的数据看作仪器的本身精度(图12)。长时间测试结果表明,仪器的结构可以达到5 μm。

图12 长时间测试确认仪器精度
4 结语
电容式静力水准系统具有精度高、自动化性能好和实时测量功能等特点,可以满足大型科学科研工程中垂直位置变化的高精度监测需求。首先,该文对自研的高精度电容式静力水准系统进行指标验证试验,相关试验结果表明,静力水准系统在5500µm~6000µm的分辨率可达1 µm,±6.0 mm量程范围内重复性高于0.26%。其次,系统进行了电容—位移标定试验,对标定数据曲线进行非线性拟合,拟合最大误差为25.12 µm,后期计划采用分段拟合的方法进一步提高拟合精度。将标定得到系数后的标定公式带到液位计算,通过测量的电容值计算液位值,验证线性度指标高于0.45%。最后,静力水准系统进行长时间监测试验,36 h内液位波动极值为29.37 µm,且数据显示液位波动与温度变化密切相关。对监测液位进行温度补偿,校正后液位波动明显变小。
猜你喜欢
防爆电机(2022年1期)2022-02-16
昆钢科技(2021年6期)2021-03-09
北京测绘(2021年1期)2021-02-05
装备制造技术(2020年4期)2020-12-25
电子制作(2019年10期)2019-06-17
家庭影院技术(2018年11期)2019-01-21
电子测试(2018年18期)2018-11-14
传感器与微系统(2018年7期)2018-08-29
体育科学研究(2015年5期)2015-02-28
物理与工程(2013年3期)2013-03-11
