
基于PSO-PNN算法的雷达点迹真伪鉴别方法
2022-12-24 06:58孟文涵
计算机仿真 2022年11期
孟文涵,林 强
(空军预警学院,湖北 武汉 430019)
1 引言
雷达把电磁波能量射向空间某一方向并接收此方向上的物体反射回的电磁波来获取目标的信息[1]。处在复杂电磁环境下工作的雷达接收到的电磁信号除有效目标回波外,还包括大量的杂波。在现有目标检测手段的处理下,无法消除的杂波就形成了剩余杂波。剩余杂波与目标回波的掺杂给雷达信号精细化处理增加了难度,主要体现在以下两个方面,一是剩余杂波容易造成虚假目标,影响回波判性分类;二是剩余杂波与目标回波掺杂在一起,容易造成处理通道饱和。
针对雷达目标检测后的剩余杂波,国内外专家学者提出了不同的研究方法。其研究思路主要体现在两个方面:一是门限器进行参数优化,如文献[2]中提出了一种自适应恒虚警检测方法,通过分段处理的方式自适应调节CFAR参数、文献[3]提出了一种智能化恒虚警率检测器,通过支持向量机(SVM)技术求得检测器在当前环境的阈值的最优解,提高雷达在动态环境的检测性能;二是搭建分类判别器,对雷达点迹回波进行真伪鉴别,如文献[4-5]中提出了一种基于神经网络和贝叶斯网络的雷达回波分类器,对气象杂波、鸟群和目标回波的平均分类精度分别达到了81.28%和91.2%、文献[6]提出了一种提出利用最近邻算法,针对空中的鸟群、风力发电机组导致空管雷达生成虚假的点迹和航迹的问题进行分类,具有较好的分类效果。相比于第一种思路,不难发现分类判别器从目标回波与杂波属性差异入手,有针对性的对雷达点迹进行分类判别,具有处理过程全面、信息损失小、结果相对精确等优势。
本文针对目标检测后的剩余杂波,提出了一种基于概率神经网络(PNN)的雷达点迹分类方法,在原有目标检测后进一步区分目标点和杂波点,并使用粒子群算法(PSO)对PNN进参数优化,提升PNN算法的分类效果。并将分类结果与BP神经网络分类结果进行对比分析,最后本文给出3个结论。
2 试验方案与样本数据制取
2.1 试验方案流程
某型民用雷达接收机输出回波的信号处理和数据处理流程如图1。雷达接收信号主要经过脉冲压缩、杂波抑制、目标检测等流程形成了回波点迹,然后经过点迹处理形成点迹,最后经过航迹处理形成连续的航迹,最终在终端显示器上显示。
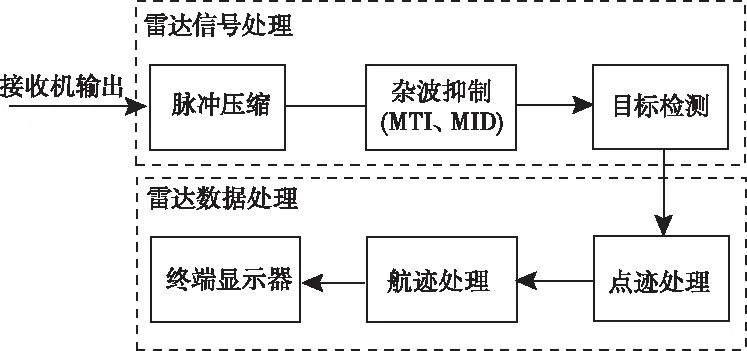
图1 雷达信号处理和数据处理流程
针对目标检测后剩余杂波过多的问题,本文在“点迹处理”环节,使用PNN网络算法来对“目标检测”环节输出点迹信号进行真假鉴别,并分析鉴别结果。同时将分类鉴别结果与基于BP神经网络的雷达点迹分类模型对比分析,总体试验流程如图2。
2.2 样本数据制取
本文采用的雷达点迹数据为从某型民用航管雷达终端上采集的实测数据。雷达点迹信息包括多普勒速度、目标原始幅度、目标背景幅度、滤波标志、恒虚警类型、杂噪比等级、滤波器组选择和EP质量,共计8个特征属性。为研究神经网络模型在不同杂波数目环境中的分类效果,选取雷达工作区域中三个扇区,其点迹数目构成见表1,其杂波与目标数目比值分别为1:4.23、1:0.73、1:0.42,三个扇区分别代表了“弱杂波”、“正常杂波”、“强杂波”三种雷达杂波背景情况。

表1 三个扇区点迹数目构成
3 基于PNN网络的雷达点迹真伪鉴别模型
3.1 概率神经网络
概率神经网络(Probabilistic Neural Network,PNN)是D.F.Specht博士在1990年提出的一种神经网络模型[7],它是基于贝叶斯最小风险准则与Parzen窗函数概率密度估计方法而发展来的一种并行算法,在模式分类问题中得到了广泛的应用。一般的,概率神经网络分为4层:第1层为输入层,n维向量X={x1,x2,x3,…,xn}输入到神经网络中去,其神经元个数与输入向量维度相等;第2层为模式层,它通过加权系数ωi与输入层相连接,训练样本输入即对应相同个数的神经元,每个神经元都设有一个中心,此层测出输入特征向量与训练样本之间的欧式距离,并返回一个标量值,完成非线性操作。PNN对标准化后的X进行径向基运算,其传递函数为如下
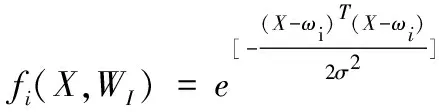
(1)
式中,σ为PNN算法的平滑度。ωi为输入层与模式层之间的连接权值;第3层为求和层,对同一类的模式层神经元的输出进行求和。神经元节点数与样本分类数相同,各神经元的输出与对应模式的概率密度估计成正比[7]。第4层为输出层,从求和层接收各类所获得的概率密度函数估计,以竞争神经元进行阈值辨别,从所有输出层神经元中匹配出可能性最大的一个,以输出分类结果Y来区别待识别模式类别与其它模式类别。Y的表示如下

(2)
式中,xi为某一个类型的第i个样本;m为某一个类型的样本总数;σ为平滑度。建立的概率神经网络结构如图3所示。

图3 PNN结构图
3.2 点迹数据处理
3.2.1 异常值剔除
雷达目标检测输出的点迹数据存在一些异常值(包括缺损值、格式异常值)。为了降低异常值对神经网络的影响,同时减少计算量,这里对异常点迹数据进行筛选剔除。
3.2.2 数据归一化
由于点迹数据各属性数值伸缩维度差异较大,在PNN网络输入层内进行样本内维度间标准化时,易发生“大数吃小数”现象,因此对要输入PNN内的样本数据提前进行归一化处理,这里采用minmax归一化方式,公式如下
(3)
式(3)中,Xmax=max{X}、Xmin=min{X}。
3.3 PNN网络鉴别模型搭建
1)为保证PNN网络得到充分的学习,又不出现“过拟合”或“过学习”现象,本文采取2:1:1的比例进行后续的训练集、测试集和验证集划分。
2)PNN网络性质决定其层次结构可以跟随输入训练集内容模式自动生成。因此,PNN输入层神经节点数与输入点迹数据维度相同,模式层神经元节点数与训练集样本数相同,求和层神经元节点数与样本类型数相同,输出层神经元与点迹样本标签数相同。
3)平滑度σ决定点迹样本分类的灵敏度,是PNN网络性能的核心量。σ值过大,可能造成PNN网络贝叶斯决策面过于平滑;σ值过小,可能造成PNN网络贝叶斯决策面过于复杂,从而影响鉴别精度效果。
4 基于PSO-PNN算法的雷达点迹真伪鉴别模型
4.1 粒子群优化算法(PSO)
粒子群优化算法(PSO),是基于群体演化的仿生学算法[8],是由Kennedy和Eberhart于1995年在研究动物群体行为的基础上提出的一种群体智能优化算法[9]。动物觅食时,一方面是要依靠个体自身的搜索;另一方面则是依靠群体内个体间的信息交流,从而快速准确地找到搜索区域内最优的食物源。PSO算法正是根据上述生物现象,而提出的一种智能优化算法。
PSO算法中,寻优的问题的每个解都被看作是搜索区间中一颗粒子。每颗粒子都包含有位置、速度和一个由适应度函数所决定的适应度函数值[10]三种属性。PSO算法的主要思想是:首先初始化一群随机粒子,然后在每次迭代中根据两个“极值”(个体极值pbest和全局极值gbest)来更新粒子的速度和位置,直至寻找到最优解。
假设在一个D维空间中,有N个粒子[11]:
粒子i位置:Xi=(xi1,xi2,…,xiD),xid∈[Xmin,d,Xmax,d];粒子i速度:Vi=(vi1,vi2,…,viD),vid∈[Vmin,d,Vmax,d];个体极值位置:pbesti=(pi1,pi2,…,piD);全局极值位置:gbest=(g1,g2,…,gD);其中,1≤d≤D,1≤i≤N。
则粒子i速度和位置迭代公式如下

(5)
式(4)和(5)中,ω为惯性权重;c1为局部学习因子;c2为全局学习因子;r1、r2为区间(0,1)内的独立随机数。
4.2 搭建PSO-PNN算法鉴别模型
选取概率网络的平滑度σ作为种群粒子群体中粒子,其优劣程度由适应度函数值的大小决定。选取在σ值下PNN网络雷达点迹鉴别模型整体识别率和目标识别率的乘积值作为适应度函数,此处适应度函数越大,PNN网络雷达点迹鉴别模型性能越优。
基于PSO-PNN算法的雷达点迹鉴别具体步骤如下[12]:

2)对粒子的位置与速度进行初始化操作。
3)输入点迹信息训练集,计算粒子的适应度的值。
4)若某一粒子的适应度优于以前任一时刻的适应度,则以该适应度作为该粒子的个体极值; 若该粒子的适应度值优于以前任一时刻所有粒子的值,则将该粒子作为群体极值。
5)更新粒子的位置与速度,并调节惯性权重ω。
6)对是否达到结束条件(达到算法最大迭代次数和满足算法收敛精度)进行判断,若已达到,迭代停止,输出GNN算法的最优平滑度σ; 若没有达到结束条件,返回第(4)步继续进行优化操作。
7)利用在输出的最优平滑度下的GNN算法对测试集的点迹进行鉴别,计算点迹鉴别准确率。
综合起来,基于PSO-PNN的雷达点迹鉴别模型的算法流程如图4。

图4 PSO-PNN流程图
5 实验与分析
本文实验在Win10操作系统和Matlab2020b环境下进行。采取随机序号的原则,对三种杂波目标数目比不同的扇区进行抽取数据集,情况如下表2。

表2 数据集构成图
5.1 平滑度σ对鉴别精度的影响
为探究平滑度σ对PNN网络鉴别分类精度的影响,本文在扇区2中,对点迹信息8个属性组合采取三个不同σ值PNN网络进行鉴别,PNN网络的性能表现如下表3。
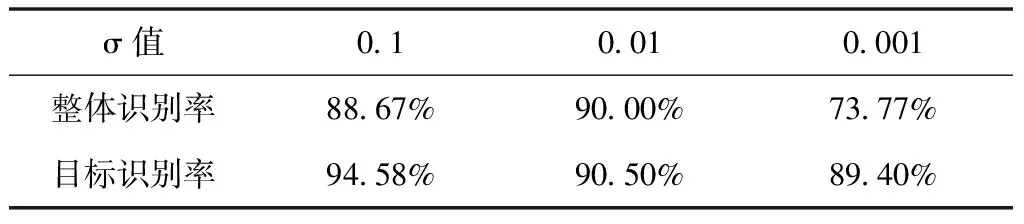
表3 不同σ值下的识别率
从表3中可以得知,PNN网络对雷达点迹真伪鉴别精度受σ值变化影响较大,因此,对PNN网络的平滑度σ值进行优化,就尤为重要。
5.2 PSO-PNN的优化效果
采用PSO-PNN网络对扇区2的点迹的8个属性进行鉴别,并与普通PNN网络鉴别结果进行对比,适应度函数变化如下图5, 效果见表4。
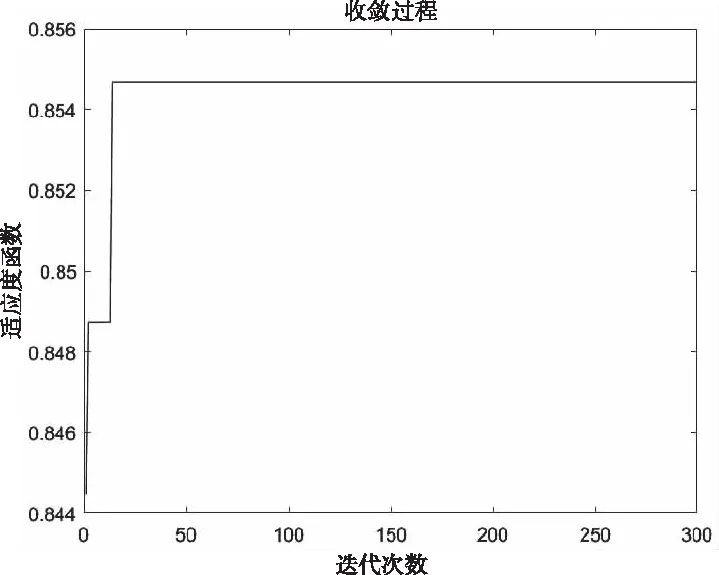
图4 适应度函数变化图

表4 不同类型PNN的识别率
由表4可以得知PSO算法对PNN网络优化效果较好,在保证整体识别率的基础上,目标识别率达93.51%,较传统型PNN网络性能有了明显提升。
5.3 不同属性组合下PSO-PNN的鉴别效果
为探究PSO-PNN算法中最优属性组合,提高模型鉴别效果,对雷达点迹信息包含多普勒速度、目标原始幅度、目标背景幅度、滤波标志、恒虚警类型、杂噪比等级、滤波器组选择和EP质量共8个特征属性进行抽样组合,形成“多普勒速度+目标原始幅度”、“滤波标志+目标原始幅度+杂噪比”、“多普勒速度+恒预警类型+EP质量”和“目标原始幅度+恒预警类型+杂噪比+EP质量”共4种简单组合,“多普勒速度+目标原始幅度+目标背景幅度+EP质量+恒预警类型+杂噪比”和“滤波标志+目标原始幅度+目标背景幅度+滤波器组选择+EP质量+杂噪比+恒预警类型+多普勒速度”共2种复杂组合[13]。
使用PSO-PNN网络根据上述6种属性组合对扇区2中的点迹信息进行鉴别,研究结果见下表5。

表5 不同属性组合下PSO-PNN鉴别识别率
由表5可以看出,复杂组合的鉴别效果优于简单组合,在复杂组合中,8属性组合的鉴别效果优于6属性组合,在保证了整体识别率的基础上,目标识别率达到93.78%。因此,可以得出:当属性组合数越多时,PSO-PNN网络识别效果越好。这就意味着模型获得的样本有效属性维度越多,信息质量越好,对目标点迹和杂波点迹的区分将会愈加有效。
5.4 不同分布的数据集对PSO-PNN网络鉴别效果影响
为研究不同分布数据集对PSO-PNN网络鉴别效果,这里分别采用PSO-PNN网络对杂波目标数目比1:4.23、1:0.73、1:0.42(“弱杂波”、“正常杂波”和“强杂波”)的三个扇区的点迹信息分别进行8属性组合鉴别,研究结果见下表6。
由表6可以得出:PSO-PNN网络识别效果会受数据集分布情况影响,目标识别率会随目标数目比例增大产生一定幅度的增高。
5.5 与其它鉴别方法的比较
雷达点迹鉴别其本质上为样本二分类问题,其它分类方法也可以用作尝试。本文选取Levenberg-Marquard学习规则的五层BP神经网络(BPNN)分类模型[14]作为对比试验。在正常杂波扇区(扇区2)进行8属性鉴别分类,其研究效果见下表7。
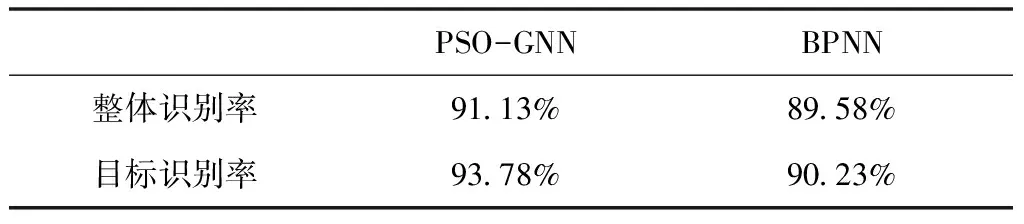
表7 两种神经网络鉴别效果
经实验发现,PSO-PNN网络整体识别率略高于BPNN,可以得知,PSO-PNN网络在完成雷达点迹鉴别此种非线性分类问题上,性能优于五层BPNN网络,这与PNN网络可以实现任意的非线性逼近这一网络特性对应;目标识别率较BPNN提高明显,可以得出,PSO-PNN网络对点迹信息中的目标属性更为敏感。综合来说,PSO-PNN神经网络在雷达点迹鉴别上较BP神经网络具有一定的优越性。
6 结束语
本文利用PNN神经网络,分别搭建了一种雷达点迹真伪鉴别模型,并针对不同平滑度σ对该模型鉴别效果的影响,采用PSO算法对其优化。同时,测试了不同属性组合和不同分布的数据集对优化后模型鉴别效果的影响。最后,将PSO-PNN网络雷达点迹真伪鉴别模型鉴别效果与其它方法进行比较。可得到以下结论:
1)当属性组合数越多时,PSO-PNN网络识别效果越好。“滤波标志+目标原始幅度+目标背景幅度+滤波器组选择+EP质量+杂噪比等级+恒预警类型+多普勒速度”为8种属性组合的最优组合。
2)PSO-PNN网络鉴别效果会受数据集内部分布情况影响,目标识别率会随集内目标数目比例增大产生一定幅度的上升。
3)基于PSO-PNN算法的雷达点迹鉴别方法能够有效对雷达点迹进行鉴别真伪。相比于BP 神经网络,PSO-PNN的整体识别率和目标识别率要更高,可以分别达到91.13%和93.78%,这种算法可以为雷达的点迹精细化处理等实际工程应用问题提供了技术新思路。
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
科学与信息化(2021年30期)2021-12-24
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
计算机工程(2020年3期)2020-03-19
中国听力语言康复科学杂志(2019年3期)2019-06-24
中国交通信息化(2018年3期)2018-06-13
浙江工业大学学报(2017年5期)2018-01-22
中国交通信息化(2016年2期)2016-06-06
西北工业大学学报(2015年3期)2015-12-14
