
新月形内齿轮泵空化流场仿真分析
2022-12-23 10:44:54毛文亮赵彦军柴红强
液压与气动 2022年12期
毛文亮, 赵彦军, 柴红强
(1.甘肃机电职业技术学院智能控制学院, 甘肃天水 741001; 2.兰州理工大学能源与动力工程学院, 甘肃兰州 730050)
引言
齿轮泵整体流动特性的全面提升是智能液压的应有之意。作为流体传动系统的动力机械,新月形内齿轮泵具有结构简单、抗污染性强、自吸能力好、加工制造容易、使用寿命长、维修保养便捷、制造成本低、能量密度高、中心距小、啮合齿廓之间的滑动速度小、齿轮副传输可靠、重合度高、稳定性好、噪声低、结构紧凑等特点,广泛应用于工程机械、船舶、航空航天、机器人等领域[1-3]。
作为齿轮泵中唯一运动部件的齿轮副,其齿廓曲线决定泵的关键性能。魏伟锋等[4]利用通用齿廓法线反转法求解了共轭齿廓曲线;胡翰林等[5]在此基础上对齿形参数进行了优化,建立了优化设计数学模型。
和其他容积式泵一样,新月形内齿轮泵普遍存在出口流量波动较大的有害特征。流量脉动率近似公式最早由崔建昆等[6]提出,然而由于精度问题限制了其应用范围。徐学忠等[7]、王仲伟等[8]根据齿轮副啮合原理推导了几何流量脉动率近似方程并计算了给定参数下的脉动率。杨国来等[9]在考虑油液属性变化基础上利用正交试验分析了流动特性随工作条件的变化规律。
为了提高齿轮副传动平稳性及轮齿强度,其重合度必须大于1,这样齿轮泵工作中不可避免地出现困油现象。王郑力等[10]应用切线极坐标法得出了困油容积变化方程,然而该公式并没有反映困油压力。SEDRI等[11]在齿轮副上开设一组新均压槽以消除困油现象,可是该结构并未考虑齿轮强度大小。
综上所述,目前公开出版的文献中并未明确给出新月形内齿轮泵空化流场的演进规律。通过本课题的研究,准确获得了新月形内齿轮泵三维内流道模型流场特性及空化演进规律,同时确定了转子区最低压力随因子的变化规律及主要影响因子,从而为消除空化提供了坚实的理论基础。
1 数学模型建立
1.1 空化模型建立
空化模型在本质上属于多相流模型,同时能够反映压力低于一定条件时油液空化强度及气体分布形态的演进规律等内容。本研究采用全空化模型来模拟齿轮泵内部空化状态下的流场特征,根据该模型的特点同时结合油液实际流动过程,需要求解蒸气方程、游离气体方程以及溶解气体方程。由于微分方程的数值不连续很容易导致求解发散,因此采用积分方程来避免。
蒸气积分方程[12-14]如下:
(1)

(2)
(3)
式中,Cc,Ce—— 空化冷凝及压缩系数,Cc=0.01,Ce=0.02
ρ—— 含气流体密度
fv,fg—— 蒸气和空气的质量分数
Ω—— 控制体
σ—— 控制体表面积
v—— 流体速度
vσ—— 表面运动速度
n——σ的表面法向
Df—— 蒸气扩散系数
μt—— 湍流黏度
σf—— 湍流Schmidt数
pv—— 饱和蒸气压
Re—— 空气生成率
Rc—— 空气耗散率
ρv—— 蒸气密度
ρl—— 纯流体密度
p—— 压力
游离气体积分方程为:
(4)
式中,Dg—— 游离气体扩散系数
gf—— 游离气体质量分数
gdequil—— 溶解气体平衡质量分数
τ—— 溶解气体耗散时间
溶解气体积分方程为:
(5)
(6)
式中,Dgd—— 溶解气体扩散系数
gd—— 溶解气体质量分数
gdequilref—— 相对压力下溶解气体平衡质量分数
pgdequilref—— 溶解气体质量分数的相对压力
1.2 含气油液动态模型
影响油液动态特性的基本属性包括密度、动力黏度以及等效体积弹性模量等。含气油液密度方程为:
(7)
式中,αf,αl—— 游离气体及纯流体体积分数
ρf—— 游离气体密度
气相成分的密度,可根据气体状态方程获得:
(8)
(9)
式中,ρf0—— 在标准大气压p0下的游离气体密度
ρv0—— 在饱和蒸气压pv下的游离气体密度
含气油液绝对黏度方程为:
μ=αlμl+αfμf+(1-αl-αf)μv
(10)
式中,μl,μf及μv分别为纯油液、游离气体及油蒸气的绝对黏度。
含气油液等效体积弹性模量方程为:
(11)
式中,Vl,Vf,Vv—— 纯流体、游离气体及油蒸气的初始容积
根据导数定义对上式进行变换可得:
(12)
式中,λ—— 多变指数
El—— 纯油液有效体积弹性模量
2 新月形内齿轮泵分布式参数模型建立
2.1 分布式参数模型建立
分布式参数模型是相对集中参数模型而言的,即该模型中至少有一个变量与空间位置有关联,该模型求解过程已经规范化,具体求解流程见图1。在整个求解流程中初始条件的离散化、流量方程的创建等内容在商业软件中会自动进行。因此,本节只需进行网格划分、边界条件确定以及控制参数设定。
1) 三维内流道网格模型建立
齿轮泵实际工作过程中摩擦副依靠一定厚度的油膜分割开来[15],因此,为了无限接近真实运行状态,在考虑油膜厚度的情况下创建内流道三维模型,其中径向油膜厚度和轴向油膜厚度均为0.12 mm,啮合齿面间的最小油膜厚度为0.03 mm。创建附有油膜的三维油道初始模型,见图2。列出图2中对应齿轮副参数,见表1。

1.出口油道 2.进口油道 3.轴向油膜 4.转子油道5.径向油膜 6.出口配油道 7.进口配油道图2 三维油道初始模型Fig.2 Three-dimensional oil channel initial model
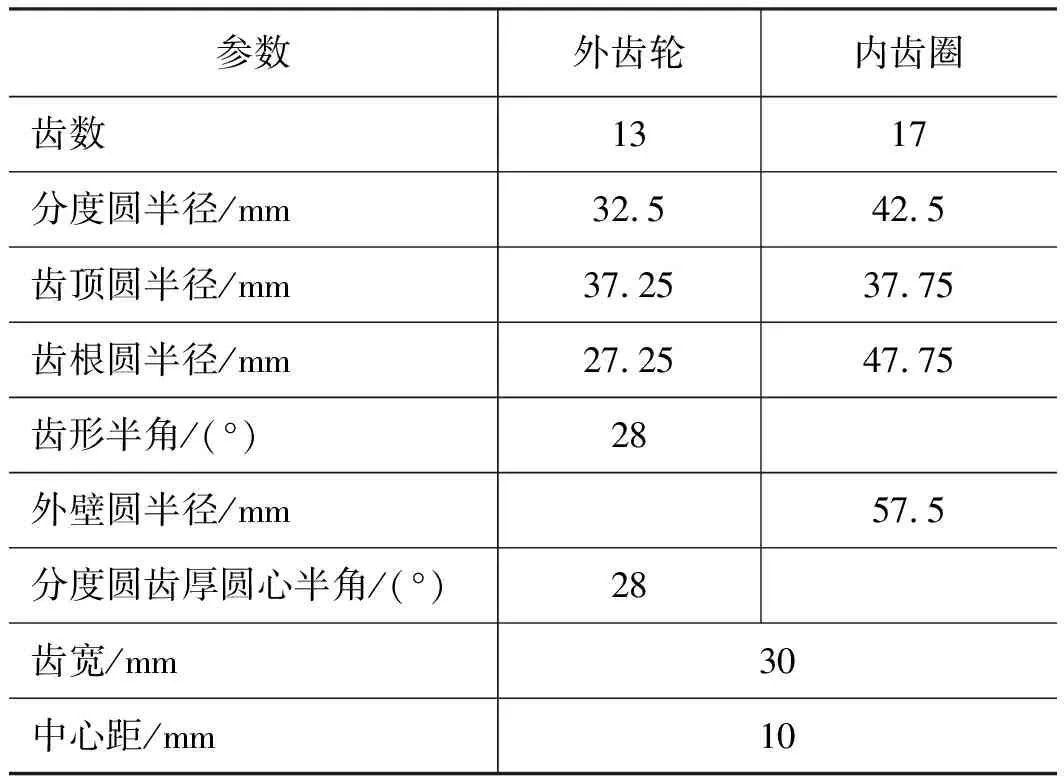
表1 齿轮副参数Tab.1 Gear pair parameters
三维初始油道模型的网格化分过程必须兼顾网格数量和网格质量(最低网格质量为0.45)两方面的内容,根据内油道结构特点,本研究对转子区域利用非结构化网格进行划分,对静态区域利用结构化网格进行划分,同时在不同流域之间设置interface进行数据传递,生成的三维油道初始网格模型见图3。

图3 三维油道初始网格模型Fig.3 Three-dimensional oil channel initial mesh model
2) 边界条件确定
根据边界条件的定义同时结合齿轮泵工作状态,需要给定进口端面压力、出口端面压力、含气量以及油温,具体参数详见正交试验方案。
在三维油道初始模型中转子区域的壁面为周期性旋转的动壁。因此,为了定义运动壁面的动作规律,本文根据齿轮泵实际转动过程生成了用户自定义函数;对于静止壁面,默认运动速度始终为0。
3) 控制参数设定
(1) 两相流模型 本研究在考虑含气量与油温变化的情况下模拟齿轮泵内部的实际流动过程。由于游离气体与油液之间存在着强烈的耦合作用,为了准确模拟这种情形,利用两相流中的Mixture模型同时启动相间滑移方程;对于主相的选择是以求解稳定性为基准,这样需要选择可压缩的游移气体为主相,同时设定相关气泡直径。
(2) 时间步数 在兼顾计算稳定性及计算周期的前提下选择固定时间步数,具体为最大迭代次数200,时间步长0.00001 s,计算周期为2。进一步获取该类型齿轮泵工作参数,见表2。

表2 新月形内齿轮泵工作参数Tab.2 Working parameters of crescent internal gear pump
(3) 湍流模型 根据齿轮泵内部实际流动状态同时结合几种常见涡黏模型控制方程组的应用范围[16],确定RNG涡黏模型来模拟内部湍流。
2.2 正交试验设计
1) 因子-水平表
油液基本属性的主要影响因素包括含气量、工作压力以及油液温度,油液属性的变化进而导致齿轮泵内部空化流场特征出现变动。因此,本研究确定游离气体含量A、工作压力B及油液温度C为试验因子。根据工程应用经验可知,含气量的水平取值为0.1%,0.5%,1.0%,工作压力的水平取值为7.5, 10.0,12.5 MPa,油温的水平取值为40,50,60 ℃。创建因子和对应水平表,见表3。

表3 正交试验因子水平表Tab.3 Orthogonal test factor level table
2) 正交试验方案
根据表3内容,同时结合等水平正交表的性质,本研究设计了L9(33)的正交表,见表4。

表4 L9(33)正交试验方案Tab.5 L9(33) orthogonal test scheme
由表4可知,正交试验方案中包括9组试验,分别列出不同试验条件对应的油液基本属性,见表5。

表5 不同试验条件对应的介质属性Tab.5 Medium properties corresponding to different test conditions
3 计算结果与分析
3.1 网格无关性验证
根据离散化方法可知,应变量在节点之间分布假设影响控制方程的离散结果。因此,需要验证网格节点数量的多少对计算结果的影响。本研究计算了5组网格节点数对应的出口端面平均流量,具体结果见表6。

表6 不同网格节点数对应的出口平均流量Tab.6 Average export flow corresponding to different grid nodes
由表6可知,当网格数增加至102.3658万,节点数增大至61.8763万之后,偏差率低于2%。因此,为节省计算时间,本研究选择网格数为136.0254万,节点数为79.3529万的网格模型。
3.2 新月形内齿轮泵流场特性及空化演变分析
1) 空化流场特性分析
齿轮泵工作过程中齿轮副处于连续旋转状态,三维模型空化流场在运动周期内时刻发生变化。因此,必须根据实际情况选择重点研究内容进行分析。众所周知,在每个运动周期内,齿轮副啮合次数等于主动轮齿数。一对共轭齿廓从进入啮合开始到退出啮合结束,在此期间啮合点位置一直发生变化。因此选取不同试验下退出啮合(对应时间为0.0088 s)及啮合点与节点重合位置(对应时间为0.01005 s)两个时刻的空化流场。
首先分别获取不同试验对应三维内流道整体压力场并标记壁面压力等值线,见图4。
由图4可知,三维油道模型外部壁面的压力等值线分界明显,压力均匀过渡。摩擦副间油膜将吸油腔与排油腔完全隔离开来,吸油腔压力(相对值)全部为负值,而压油腔压力则全部为正值。由进口开始,压力沿进油通道逐渐递减,在转子区域降至最低;由出口开始,压力逆向出油通道逐渐递增,在转子区域升至最大。究其原因是齿轮副高速旋转后产生吸空现象,进口油液在压差作用下输送至转子区吸油侧,之后通过齿间传输至转子区压油侧,最后在压差作用下将压油侧油液驱至出口。
接着获取转子区域Z轴方向3个等距横截面对应的压力场,见图5。
由图5可知, 由于新月形内齿轮泵特殊的齿廓曲线(外齿轮齿廓为直线,内齿圈齿廓为共轭高阶圆弧曲线),不同试验及不同时刻对应横截面上无明显的困油区域,啮合齿面间压力变化均匀,啮合区内不存在整个流道中的最大及最小压力。

图4 不同试验条件下整体压力场对比Fig.4 Comparison of overall pressure field under different test conditions
由于工作条件的变化,尽管不同试验中内、外齿轮的转速相同,然而转子区的吸油压力完全不同。进一步获取不同试验对应转子区最小压力正交试验分析表,见表8。
根据正交试验性质,表8中影响吸油区中最低压力的因子主次关系为C>A>B,表明油温是最主要影响因素,其次为游离气体含量,工作压力对转子区最小压力的影响可忽略。随着油温地增加,最小压力显著升高。究其原因是油温越高,油液黏度越低,不均匀内泄漏越多, 对应最小压力越高。含气量对最小压力的影响没有表现出明显的正相关或者负相关。

图5 不同试验条件下Z轴横截面压力场对比Fig.5 Comparison of Z-axis cross-section pressure field under different test conditions
2) 流体空化强度及形态演变分析
齿轮泵运行时含气油液中的液相和气相相互作用致使内部空化形态一直处于动态演变过程。根据前文分析结果,获取不同时间对应齿轮泵中压力最低转子区域的气穴分布,见图6。需要说明的是,不同试验的含气油液对应空化演变规律相似,因此本研究以试验2为例进行分析。
由图6可知,随着时间的推移,含气油液中的气相演变过程为:由最初的均匀分布逐渐演变为分散集中分布,再到均衡分布的过程。这种演进规律在啮合区域尤为明显,具体表现为啮合区域中气相由内齿圈齿根逐渐向外齿轮齿顶迁移;同时与其相邻面上的气相由外齿轮齿根逐渐向内齿圈齿顶迁移。
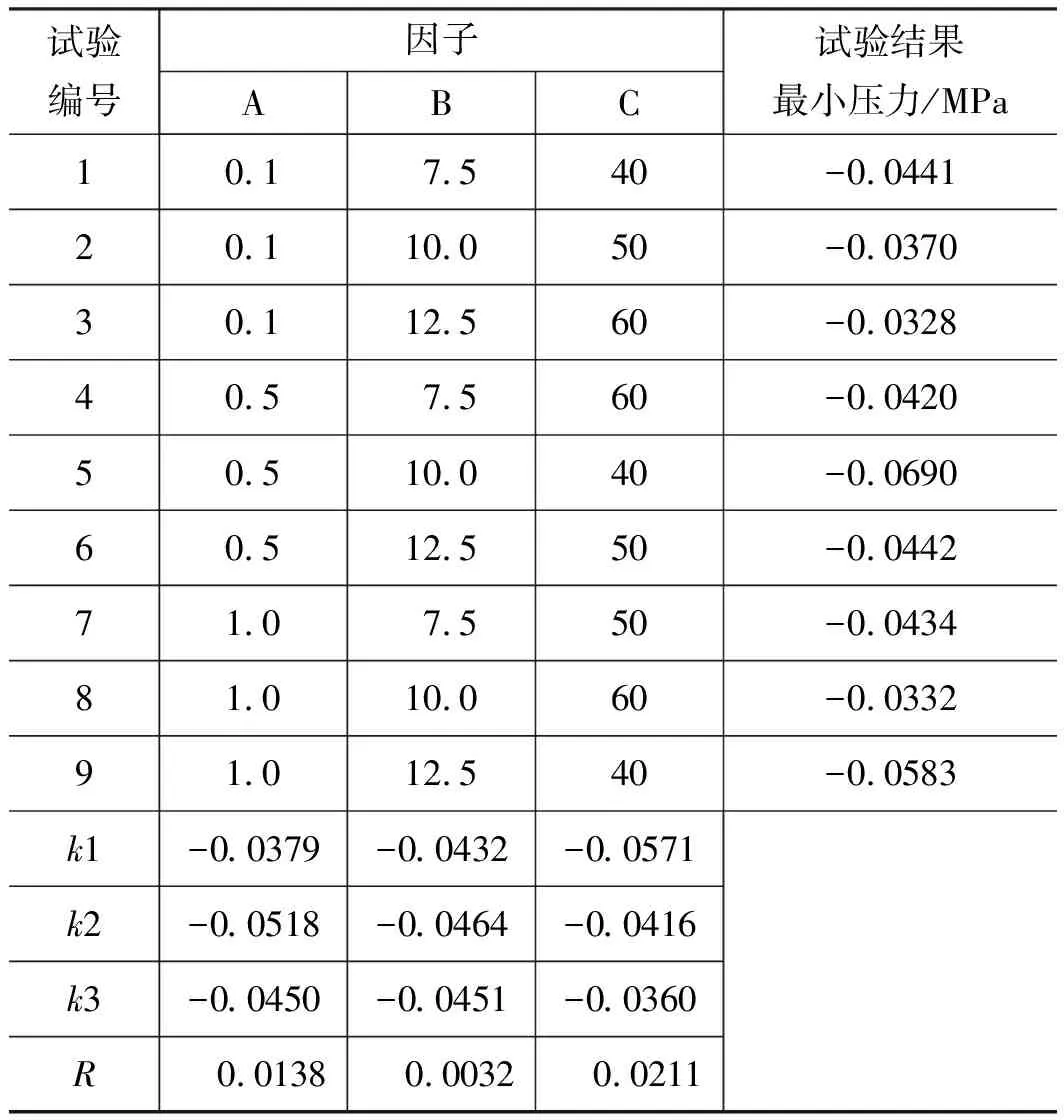
表8 转子区最小压力正交试验分析表Tab.8 Orthogonal test analysis table of minimum pressure in rotor area
外齿轮齿顶区的空化面积逐渐向主动作用齿面扩大,空化强度逐渐增加,一直到(t0+0.6) ms时空化面积增至最大,空化强度升至最高,此后逐渐衰减,直至(t0+1.2) ms时,气相聚合现象结束。同一时间,内齿圈齿根区域的气相消散面积逐渐向从动作用齿面扩大,到(t0+0.6) ms时达到最大,此时空化强度降至最小,之后开始缩减,直到(t0+1.2) ms时,气相消散现象结束。
在此期间,相邻于从动作用齿面上的空化面积由内齿圈齿顶开始逐渐扩大,到(t0+1.0) ms时空化面积及空化强度达到最大,此后逐渐衰减,直到(t0+1.2) ms时空化聚集现象结束。与此同时,相邻于主动作用齿面上的气相消散面积由外齿轮齿根开始逐渐扩大,直至(t0+1.0) ms时气相消散面积达到最大,空化强度降至最小,之后开始缩减,直至(t0+1.2) ms时气相消散现象结束。
结合图5可知,啮合区域的气相演化过程与横截面上压力场的演进规律完全吻合,进一步验证了流体区域的压力变化是含气油液中气相发生运移的根本原因。
4 结论
(1) 转子区吸油侧是整个齿轮泵内压力最低的区域, 对应排油侧则是压力最高的区域。由于工作过程中无明显的困油区域,从而造就了该类型齿轮泵在行业中荣获“静音泵”的美誉;

图6 试验2对应流体空化形态演变过程Fig.6 Evolution process of fluid cavitation morphology corresponding to test 2
(2) 进出口区以及对应配油区的压力等值线非闭合,而转子区中部分位置的压力等值线处于闭环状态,转子区的流动状态是整个内流道中最复杂的;
(3) 转速确定时, 油温是影响转子区最低压力的主要因子。随着油温增加,由于油液黏度越低,不均匀内泄漏越多,最低压力显著增大。含气量对最低压力的影响没有表现出明显的正相关或者负相关;
(4) 啮合区域中的空化演进规律最为明显,气相整体呈现出先均匀分布,再演变为分散集中分布,最后又演化为均衡分布的过程。啮合齿面间的气相由从动作用齿面向主动作用齿面迁移;而与其相邻齿面上的气相由主动齿面向从动齿面迁移。压力演变是气相发生运移的根本原因。
猜你喜欢
钢铁钒钛(2023年5期)2023-11-17 08:48:34
设备管理与维修(2022年21期)2022-12-28 07:35:04
北京航空航天大学学报(2022年6期)2022-07-02 01:59:30
汽车维修与保养(2020年11期)2020-06-09 05:42:10
厦门理工学院学报(2016年1期)2016-12-01 04:50:53
水利科技与经济(2016年7期)2016-04-25 13:03:00
橡胶工业(2015年1期)2015-07-29 08:33:58
设备管理与维修(2015年11期)2015-03-16 05:57:21
中国塑料(2014年2期)2014-10-17 02:51:06
应用化工(2014年1期)2014-08-16 13:34:08
