
基于热释电红外传感器的自定位清洁马桶控制系统设计
2022-12-22 06:58郭陈江山
台州学院学报 2022年6期
汪 洋,陈 跃,郭陈江山
(台州学院 电子与信息工程学院,浙江 台州 318000)
0 引言
随着科技的发展和人们生活水平的提高,智能化已经是现代家居的主流发展趋势。短短几年时间,很多便捷、人性化的智能家居不断涌现,智能家居迎来了巨大的发展热潮[1]。智能马桶作为智能小家电中的潜力股,有着广阔的发展前景。据市场调研发现,目前新装修的房子普遍会选择一台及以上智能马桶,预计智能马桶未来会成为日常的重要消费品[2]。
但据用户反馈,在实际使用过程中,很多拥有臀洗和妇洗功能的智能马桶存在误冲的现象,甚至因操作不当而损坏设备。究其原因:多是受制于现存市面上的智能马桶产品喷水伸缩杆长度无法精准调节,很难对不同的使用者进行精确定位和清洗;市面上大多智能马桶采用压力传感器,这易导致马桶在使用者调整坐姿时产生误判和误清洗等操作。上述情况使得市场急需一款能自动精准定位和清洁的智能马桶。
1 肛门定位原理和方法
肛门定位的设计主要基于热辐射原理。一切温度高于绝对零度的物体都能产生热辐射,温度愈高,辐射出的总能量就愈大。根据这一基本思想,通过传感器测得一块区域的多个像素点辐射出的不同能量的大小,确定各个像素点对应的温度。
1.1 红外热辐射定位原理
由普朗克辐射定律(示意图如图1所示)可知,温度高于绝对零度的物体所辐射出的能量与温度成正比,即

图1 普朗克辐射定律示意图

其中,I为辐射率,λ为波长,T为黑体的温度,h为普朗克常数,c为光速,e为自然对数的底,k为玻尔兹曼常数。
结合斯特藩-玻尔兹曼定律,易发现其两者都包含的思想为:一个黑体表面单位面积在单位时间内辐射出的总能量(称为物体的辐射度或能量通量密度)j*与黑体本身的热力学温度T(又称绝对温度)的4次方成正比,即

1.2 利用AMG8833的定位方法
AMG8833是一款8×8像素的红外辐射量热释电红外阵列传感器,其实际检测面可看作臀部在二维平面上的投影,用MATLAB建模的示意图如图2所示。由于将复杂的三维结构转变为用温度体现的二维数组,故在其纵横视野范围内的有效探测角度约为90°,有效探测面积可高达400 cm2,很好地满足了正常使用需求。
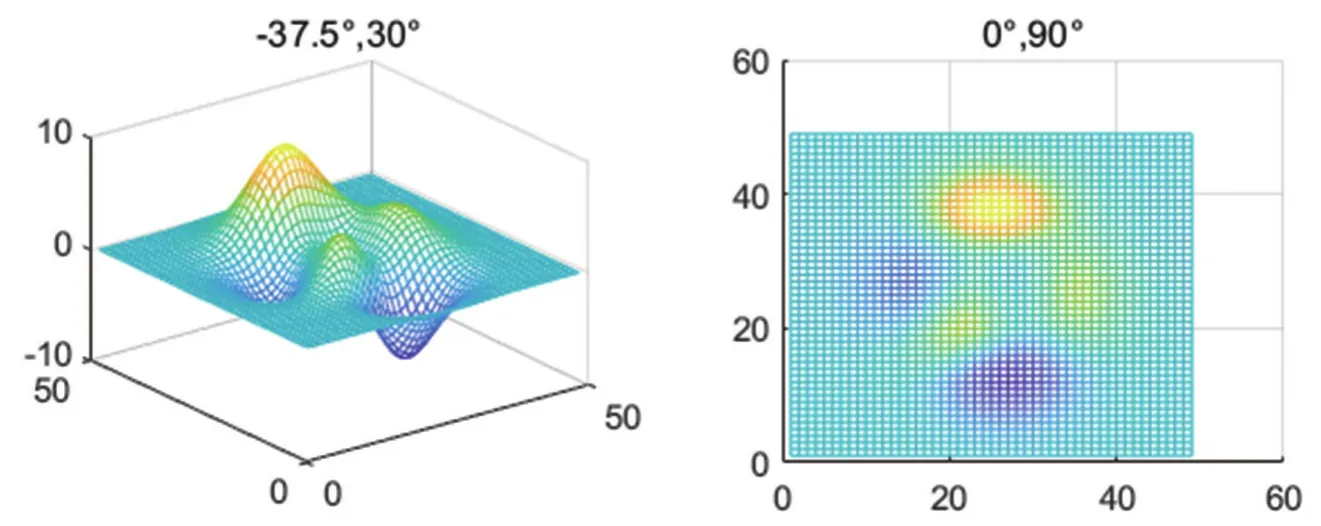
图2 检测面投影图
由于不同使用者的臀部结构有细微差别,无法利用简单的逐级扫描与COS余弦校准算法来精确定位肛门位置,故本设计还提出了针对不同使用者的全局建模思想:启动系统后,滑台将向前伸出至最长,同时快速扫描整个臀部,获得该使用者的臀部温度模型参数,得到最高温点坐标,计算出滑台回收距离,再缓慢收回至合适位置,实现针对该使用者的精确定位。
2 系统分析与设计
本系统采用单片机STM32F103RCT6作为主控芯片,使用C语言编程[3],产生脉冲宽度调制(Pulse Width Modulation,PWM)驱动丝杆滑台向下移动。在移动过程中,红外传感器会监测实时的矩阵温度,同时传送给单片机进行数据处理,分析当前矩阵的最高温度点。若最高温度点靠前,单片机将控制滑台继续伸出;若最高温度点靠后,则单片机控制滑台向后收回。当判断到实时矩阵温度的最高温度点和喷水装置处于一致方向时,说明已经定位到实时的肛门位置,此时内嵌在系统中的蜂鸣器会发出1 s的蜂鸣声以提醒使用者定位成功。与此同时丝杆电机停转,滑台停止,继电器接通,以控制水泵运作,使喷水装置喷出水流,并持续10 s完成精准清洁,其工作流程如图3所示。

图3 系统工作流程图
2.1 热释电红外阵列传感器
采用的AMG8833是一种检测红外辐射量的热释电红外阵列传感器[4],如图4所示。该传感器能在距离小于等于7 m的范围内探测到一个人,其分辨率到达64个像素点,最大帧频为10 Hz,温度测量范围为0°C至80°C。该传感器与单片机通过I2C传输数据,在进行连续温度扫描时仅返回矩阵形态的温度数据组,无法进行图像扫描,在实现目标检测的同时又保护了使用者隐私,非常适合创建人体探测器或微型热相仪。图5所示为测量数据的返回矩阵表,搭配STM32F103RCT6微控制器,利用串口持续返回阵列的温度数值,通过128个寄存器(8位寄存器,由高地址寄存器和低地址寄存器共同构成一个单位像素点温度的存储寄存器)一次性读取64个像素点的温度,存储在我们自定义的数组中,再对比该数组中最高温度所在点与当前位置,以此来判断是否能找到目标位置。

图4 AMG8833模块图
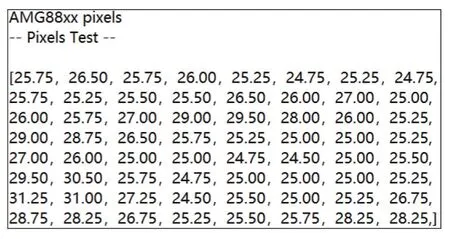
图5 红外传感器返回数值矩阵
在接线配置端方面,该设计只连接VIN、GND、SCL、SDA和拉低AD0地址选择引脚,将7位地址配置为0x68。通过这样的接线,可以实现传感器与单片机的信息交换,且没有阻断传感器的持续工作。
2.2 步进电机丝杆滑台
丝杆滑台的设计原理是采用两相四线制、带有1∶5减速箱的步进电机来带动丝杆,其驱动电压范围宽达5~12 V,驱动电流可耐受0.5~2 A。电机步距角低至15°,但其直径仅为27 mm,在做到结构小巧的同时又可保证其工作效率与人体安全性。当系统上电后,每输入一个脉冲信号,步进电机转子便前进一步。步进电机旋转的步距角是在电机结构的基础上等比例控制产生的,如果控制电路的细分控制不变,那么步进旋转的步距角在理论上是一个固定的角度。由于机械装配等定会产生误差,但是步进电机每旋转一周即可清零误差,这就使得该闭环系统不会累积误差,真正做到实时高精度,其结构如图6所示。

图6 步进电机结构示意图
丝杆滑台采用了一根螺杆和滑台相啮合的形式,在保证螺杆滑块相对转动的情况下,使螺杆轴向转动,从而实现带动螺杆上的滑块纵向运动。电机带有差速箱,具有较大的减速比,在方便控制的同时也增大了扭矩。这样做大大简化了设计,能够在不安装外部机械联动装置的情况下直接使用直线步进电机进行精密的线性运动[5]。
2.3 部件安装
如图7所示,将AMG8833红外阵列传感器、喷头组装在丝杆滑台的滑块上,并将搭载上述设备的丝杆滑台以向下倾斜45°的角度安装在模拟马桶壁上。
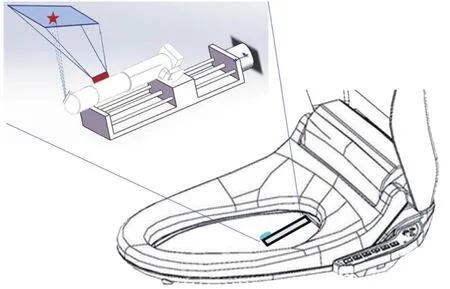
图7 滑台及喷头安装示意图
由于正常情况下人体臀部肛门温度最高,通过传感器获取温度矩阵后,利用算法可找到矩阵中温度的最高值,从而实时定位肛门位置,以达到对不同坐姿使用者的精准清洁的目的。
3 实验数据记录及分析
为探究传感器定位精度及系统动态响应效果,在实验中笔者制作了一个37°C的三极管恒温发热电路(以下简称“热源”)以模拟人体肛门位置,同时设计了如下两种测试方案。
3.1 静态定位精度测试
本实验设置7个测试点,随机位于首次测试点的上、下任意位置。首先将热源任意放置一点并记为零点,启动系统,观察到工作正常且状态良好。待首次工作完成后初始化系统,使其进入待机状态,再将热源随机上下移动到另一待测点,记录下待测点间距离。当系统工作完毕后记录下实际喷射距离,重复上述步骤,待完成一轮测试后,再次重复上述测试环节5次,剔除原始数据中的极端结果,对剩余结果求得平均值,得到如表1所示结果。

表1 静态定位精度测试数据
3.2 动态响应联动测试
本实验设置7次测试。首先将热源任意放置一点并记为零点,启动系统,观察到工作正常且状态良好。待首次工作完成后初始化系统,使其进入待机状态,此时唤醒设备,在设备开始追踪热源位置时不断移动热源,并在一随机位置停下,记录下待测点间的距离。此时可观察到喷头在实时追踪热源的位置,当热源停下后,喷头即完成定位锁定,开始清洗流程。系统工作完毕以后记录下实际喷射距离,重复上述步骤,待完成一轮测试后,再次重复上述测试环节5次,剔除原始数据中的极端结果,对剩余结果求得平均值,得到如表2所示结果。
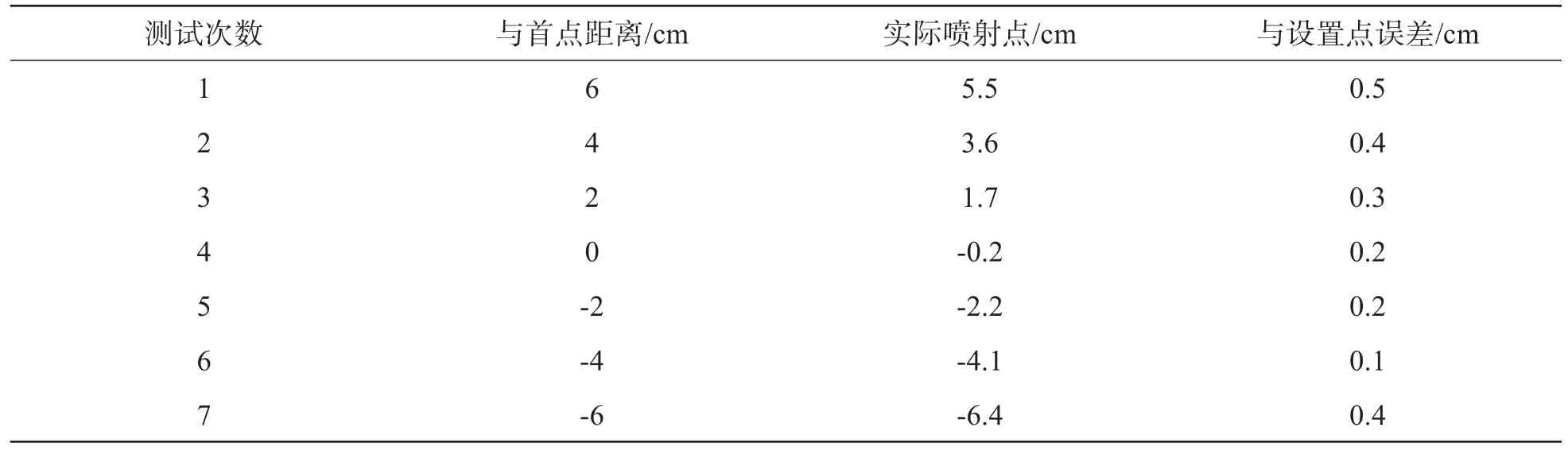
表2 动态响应联动测试数据
3.3 实验结果与数据分析
由于实验所用马桶及其控制装置为亚克力板手工搭建,部分构件机械结构复杂、安装方式为胶装,存在一定的安装偏差;且实验测试步骤设计难度偏高,故实验数据显示实际清洗喷射点与设置点之间稍有偏差,但其最大误差只有8.3%。考虑到本次实验用来模拟肛门的热源为一个温度点,实际肛门是一整块高温区域,因此认定该设备效果良好,在实际中可达到智能跟踪定位清洁的功能。
4 结语
智能马桶作为智能小家电中的潜力股,有着广阔的发展前景,但目前市面上的智能马桶普遍存在冲洗定位不准确以及误冲等问题,困扰着不少消费者。本设计方案以较为低廉的价格解决了上述两大问题,符合市场需求,有较好的经济、社会效益。本设计可根据人体的构造实现精准定位的臀洗和妇洗功能,待后期部分技术成熟后还将引入轴向旋转喷淋系统,以进一步提升智能马桶的“冲洗性能”“节能性能”“舒适性能”,为居家卫浴提供更智能化、人性化的解决方案。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
汽车实用技术(2022年15期)2022-08-19
机械工程师(2021年12期)2021-12-22
佳木斯大学学报(自然科学版)(2021年6期)2021-12-21
有色金属材料与工程(2021年4期)2021-11-27
橡塑技术与装备(2021年2期)2021-02-01
机械管理开发(2018年2期)2018-03-16
孩子(2016年7期)2016-07-11
少儿科学周刊·儿童版(2016年1期)2016-03-14
制造技术与机床(2012年6期)2012-01-27
