DP2自航式船舶电力推进系统逻辑分析
2022-12-21 01:38张兴权
船舶标准化工程师 2022年6期
王 刚,张兴权
(招商局重工(江苏)有限公司,江苏南通 226116)
0 引言
随着动态定位技术愈发成熟,动力定位(Dynamic Positioning,DP)系统在船舶和海洋平台应用更加广泛,平台支持船、风电安装船和铺管船对于推进组合功能的要求也越来越多。因此,出现很多带有DP功能的自航式电力推进船舶。推进系统包括推进器、推进马达、推进变频器、推进控制系统以及让推进系统顺畅运行的辅助系统(见图1)。本文以某具有自航功能的DP2风电安装船为实例,对DP2自航式船舶电力推进系统的控制方法进行分析。
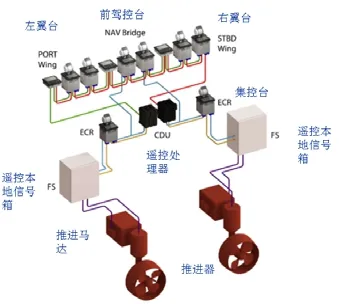
图1 常见推进系统的配置
1 推进系统的控制和配置
根据《国际海上人命安全公约》(International Convention for Safety of Life at Sea,SOLAS)要求[1],所有对船舶推进、控制和安全所必需的控制系统应独立设计,无法实现独立设计时应保证系统失效时不会影响其他系统的运行。即在遥控系统的任一部分发生故障时,推进机械仍能就地进行控制。因此,控制箱配置需要包括本地控制和遥控两部分。
本地控制包括舵机控制和马达控制。舵机控制需要实现应急的操舵功能。若变频器设备放置在本地,可通过控制变频器实现马达的启停和调速。若变频器不在本地,则需要通过推进器控制箱或遥控箱来控制推进马达。操舵控制装置和马达控制装置需要就近布置,可根据空间和设备的搭配选择不同本地配置方案。
遥控部分主要通过操作站手柄实现功能,包括单个推进器的操纵手柄、联合操作手柄、命令转换装置、应急停止按钮、模式选择装置和显示仪表等。根据SOLAS要求,推进机械在同一时间内仅能由一处进行遥控,各处所间允许设置互相连接的控制位置。各处所应设置指示器用于指示正在控制推进装置的控制地点。驾驶室和机器处所之间的控制转换只能在主要机器处所或主机控制室进行。
推进控制涉及的部件和方式较多,控制方式和模式也较多。控制逻辑原理是先本地后遥控,所有遥控的接口均通过本地控制箱直接连接,可选择网络和硬线两种连接方式,备用部分最好采用硬线连接。当设备处于非随动模式,且变频器和舵机都处于停止工况时,不能通过遥控启动推进系统。推进系统各部件之间的联络关系见图 2,推进系统启动命令和停止命令的传送过程分别见图3和图4。

图2 推进系统各部件之间的联络框图

图3 推进系统启动命令传送过程

图4 推进系统停止命令传送过程
2 推进系统外部接口
本文仅阐述动力定位和自航的控制要求,不讨论监测部分。这是由于不同船级社的入级符号要求不同,推进部分监测点的布置可参照相关船级社的要求。
船舶操作系统分为以下4部分:1)手动遥控操作部分(操作手柄);2)动力定位系统;3)自动舵系统;4)电子海图系统。手动遥控操作部分仅涉及人为操作,无其他辅助操作,仅需连接推进器和推进马达接口即可。动力定位和自动舵是带有控制参照和反馈的智能形态,是现代船舶的体现。下文重点介绍这两部分内容。
2.1 动力定位系统
动力定位系统指的是通过推进器推力能维持海上物体位置和朝向在可接受限制范围内运动的系统。动态定位的设备包括所有能提供给动态定位系统的定位控制的元器件及系统。根据规范要求,DP2船舶推进系统需要进行冗余设计,当有源组件(发电机和配电板)、推进器、控制装置等任何系统产生单一故障时,不会发生失位。冗余设计不需要考虑电缆、管道、手控阀等静态部件,也不考虑火灾或者水淹等极端情况[2-5]。
船舶在水面上的受力情况见图 5,动力定位操作系统的是利用推进器的推力去对抗风速、洋流及船舶纵横倾的闭环操作系统。动力定位系统包括计算机系统、操作系统、位置参考系统和传感器系统(见图6);根据冗余要求,需提供备用的操作操控装置。

图5 船舶在水面上的受力情况
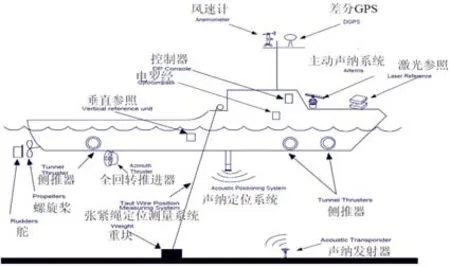
图6 传感器类型
动力定位系统通过控制箱接入推进器系统,船舶处于动力定位操作模式时,动力操作系统根据传感器给出的信息和船舶的受力面积得到船舶受力方向,定位控制箱的分析给出推进器转速和转向的要求,推进系统反馈实际执行情况。动力定位系统的备用控制箱需要通硬线或双环网与本地控制相连。
2.2 自动舵
自航的船舶在长距离航行时通常需要使用自动舵系统以便减少船舶操作人员的工作量。自动舵可分为航向控制系统和航迹控制系统。航向控制系统是在船舶可操纵性的相关限制内结合其航向信息源,在最低船舶操舵装置使用条件下使船舶保持预定的航向。航迹控制系统要确保在船舶操纵性受到一定限制的条件下,使船舶自动地保持在预先计划的对地航线上。不管何种模式下,自动舵一般只是控制推进器的转向功能。自动舵配置情况见图 7,自动舵命令传输情况见图8。
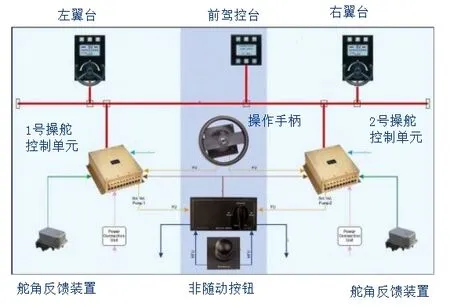
图7 自动舵配置情况
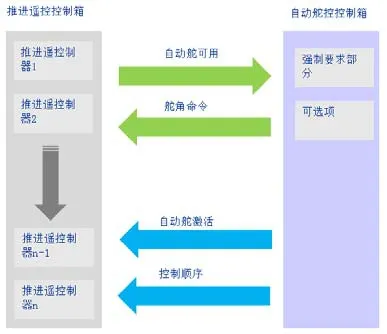
图8 自动舵命令传输情况
一般情况下,自动舵只是控制主推进的方向,给出−35°~35°的命令,通过推进器的反馈核实转向信息。通过操作手轮或电子海图给出转向命令,在完成推进动作后将相关信息信息反馈自动舵,进而完成控制。
3 结论
本文以某具有自航功能的 DP2风电安装船为实例,对DP2自航式船舶电力推进系统的控制方法进行介绍,分析推进遥控与推进器各部件之间的连接关系,以及推进遥控与外部的动力定位系统和自动舵系统之间的接口和控制逻辑,实现推进控制要求。希望本文可为船舶电力推进系统的设计提供一定参考。
猜你喜欢
新能源科技(2022年8期)2022-11-22
小学生优秀作文(低年级)(2021年11期)2021-12-06
舰船科学技术(2021年12期)2021-03-29
语文世界(小学版)(2019年2期)2019-02-24
当代陕西(2018年12期)2018-08-04
科技创新与应用(2018年17期)2018-06-28
珠江水运(2016年21期)2016-12-08
中国修船(2015年5期)2015-11-25
学习月刊(2015年10期)2015-07-09
小天使·一年级语数英综合(2014年7期)2014-06-26