基于多波束系统的荆江门河段水下地形测绘
2022-12-21 06:49马郑海李胜宣罗文胜
水利水电快报 2022年12期
马郑海,林 荡,李胜宣,罗文胜
(1.湖南理工学院 机械工程学院,湖南 岳阳 414000; 2.长江洞庭湖水利事务中心,湖南 岳阳 414000;3.岳阳永安工程技术有限公司,湖南 岳阳 414000; 4.岳阳市水利水电勘测设计院,湖南 岳阳 414000)
0 引 言
目前流经湖南省的长江水域均在岳阳市境内,包括荆江河段、城螺河段和界牌河段,全长163 km。长江岳阳段年平均径流量为2.04万m3,最大年径流量为7.88万m3,该河段中的荆江门河段汛期最大水深达63 m,最大流速达4.27 m/s,且该河段弯道既多又急,平均约10 km一个弯道,弯曲半径约为1 350 m,崩岸线比例高达62%。长江中下游13个重要险段,岳阳市占了两个,即下荆江河段和城陵矶以下的岳阳河段,且两河段均被列为重点守护段。近年来,政府加大了防洪大堤建设力度,特别是1998年长江特大洪水之后,长江护岸工程建设得到极大发展。
水下地形测量工作在长江崩岸治理过程中担任着重要角色,是长江大堤修补与维护的前提和基础[1]。传统的测量手段主要采用全站仪、单波束测深仪等设备,借助人力以船舶为载体测量河水深度及河岸线地形。传统方法普遍存在测量数据精度低、费用高、效率低、点位分布不均匀等缺点,难以准确获取水下地形数据。而基于多波束系统的水下测量技术是一种新型水下测绘方法。该技术可有效实现水下数据采集与处理,为长江崩岸治理、江河湖泊地形测量和码头测量等工程提供技术支撑。本文介绍了基于多波束系统的测量技术在长江中游荆江门河段水下地形中的应用。
1 水下测量原理及方法
1.1 多波束测深原理
多波束测量技术是一种具有高效率、高精度和高分辨率的水下地形测量技术[2]。与传统单波束测深技术相比较,多波束测深技术具有测量范围大、速度快、精度高等优点。它把测深技术从原先的点线状扩展到面状,并进一步发展到立体测图,从而使水下地形测量技术发展到一个较高的水平[3]。多波束测量技术能够对水下地形进行全覆盖测量,具有同步测深点多、测量快捷、全覆盖等特点,能完成常规方法无法完成的测量任务,尤其适用于大比例尺的测绘和特殊要求的水道地形测量等[4-5]。图1为本次水下测量所用到海卓MS400P多波束测深系统设备。多波束测深技术主要利用安装于船底或拖体上的声基阵向与航向垂直的水底发射超宽声波束,同时发射的波束对水底形成一个覆盖式条带,此条带宽度由波束的发射开角决定,而波束发射角由发射模式控制参数来决定[6]。船姿传感器感知的船姿信号和发射模式信号一同传给信号处理器,信号处理器根据这些信息来计算出发射脉冲信号和脉冲数据,然后这些数据被传送到多通道变换器,形成多个波束信号,并发射出去[7]。其测量条带覆盖范围为水深的2~10倍,与现场采集的导航定位及姿态数据相结合,绘制出高精度、高分辨率的三维数字点云图像。

图1 多波束测深系统探头
1.2 数据采集处理方法
水下地形测量主要依托多波束测深系统[8]。经过硬件设备安装与软件调试工作后,通过采集不同时段的水深声波数据,经过处理得到点云数据,进一步滤波降噪,最终可得到水下地形点云图,具体技术路线如图2所示。
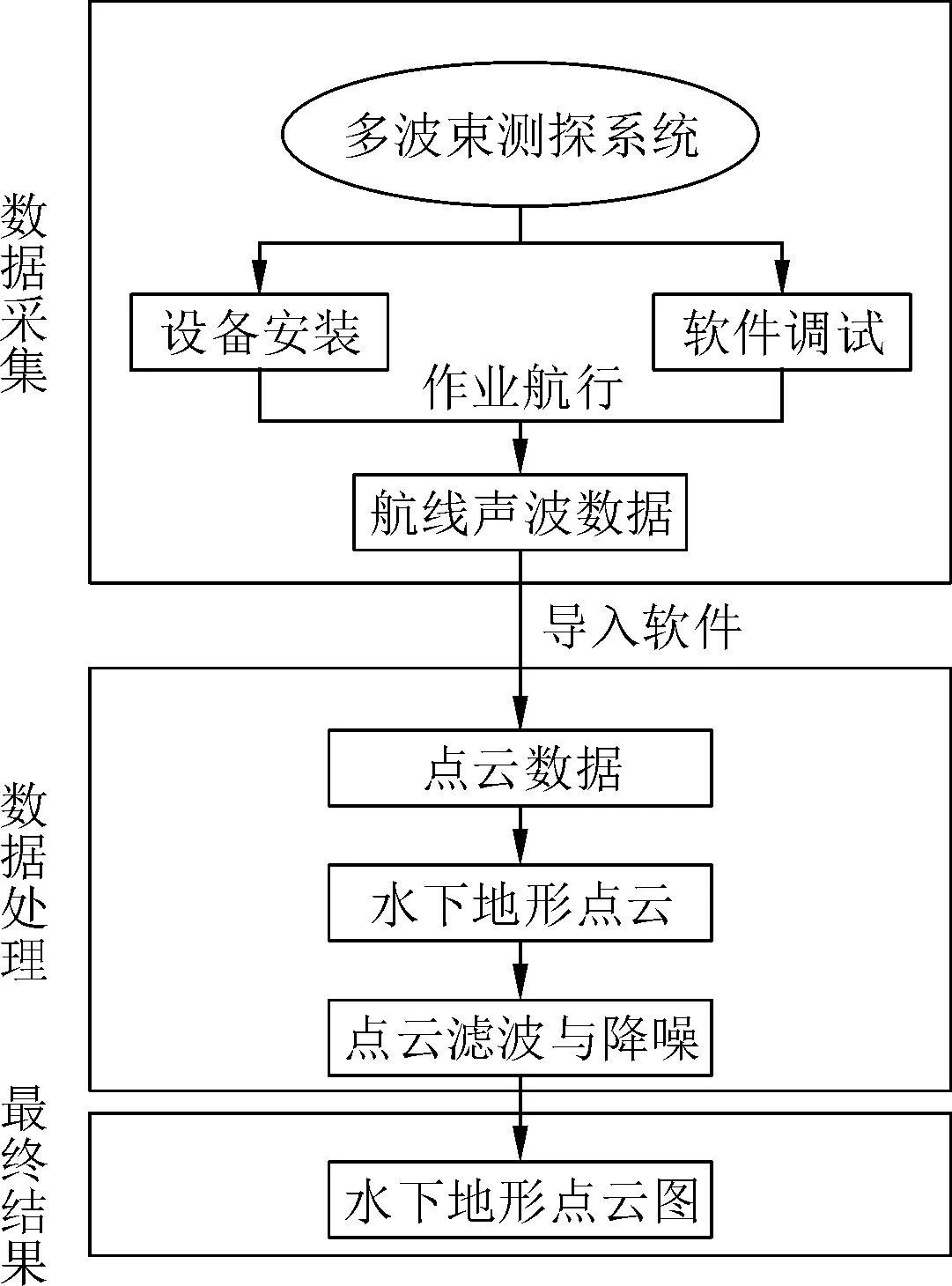
图2 测量技术路线
1.3 精度分析验证方法
使用多波束测深系统获得水下地形点云数据后,需要对该数据进行精度分析与验证。本文采用统计学中的T检验方法,T检验主要用于样本含量较小的对比试验,用来比较两个样本平均数的差异是否显著。在实验中随机挑选出20组点云数据,取Z坐标值与单波束测深仪所得数据作对比分析,比较来自两个独立总体的样本平均数差异是否在规定范围以内,由此判断多波束数据的可靠性[9]。
2 工程应用
2.1 工程基本情况
长江岳阳段长约163 km,在本次测绘考察中选取荆江门河段作为测量对象,图3为测区示意图。荆江门河段是长江中游河床最深,水流流速最快,弯道最多、最急,崩岸线比例最大的地区[10]。此前并没有太多准确、详细的地理信息数据,亟需通过多波束测深系统测绘出精确的河道地形模型,为长江崩岸治理提供支撑。

图3 测量区域
2.2 测量实施情况
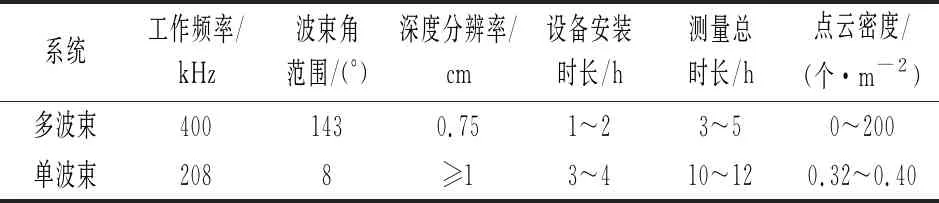
本文中的水下测量主要在汛期前和汛期后两个时期进行,采用海卓MS400P多波束测深系统对荆江门河段水下地形进行测量,具体装备设置见图4,多波束系统技术参数见表1,测量情况见表2。具体测量步骤如下。
(1) 在测量船船舷一侧安装固定支架,支架底段连接多波束探头,多波束系统的连接线通过支架管道可连接定位天线与甲板单元,甲板单元与笔记本电脑连接。将所有设备连接好移动电源,通电开机。
(2) 硬件设备连接完成后,开机调试软件,应用多波束测量软件海测通,在调节大地测量参数及其他参数后即开始测量。
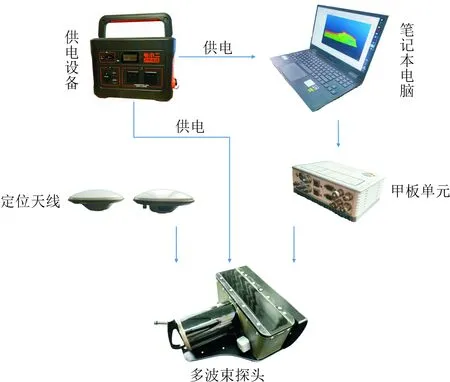
图4 多波束测深系统组成

表1 MS400P多波束测深仪主要技术指标
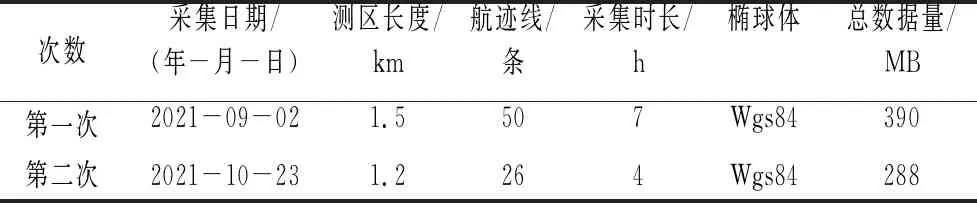
表2 水下测量数据汇总
(3) 测量开始时先进行测区规划,在本文中选取荆江门河段约1.5 km的测区范围,随后根据江水大致流速调节测量船船速,最大船速尽量控制在6节以内。
(4) 测量过程中需要进行校准测量。在航行一段距离获取到部分地形数据后,根据地形进行航线数据校准,校准航线选择地形起伏波动较大的地区,校准之后继续完成剩下区域的测量,直至测区地形的全覆盖。
2.3 点云数据滤波
测量完成后获得航线记录数据即声纳数据[11],将其导入进数据处理软件Hypack中转换为地形点云数据。此时点云数据受设备及环境影响包含许多噪点,需要进行降噪滤波处理,使用软件Hypack中的Hysweep模块,经过一级编辑、二级编辑后得到光滑的点云模型。图5为降噪滤波后得到的不同角度的水下地形点云图。
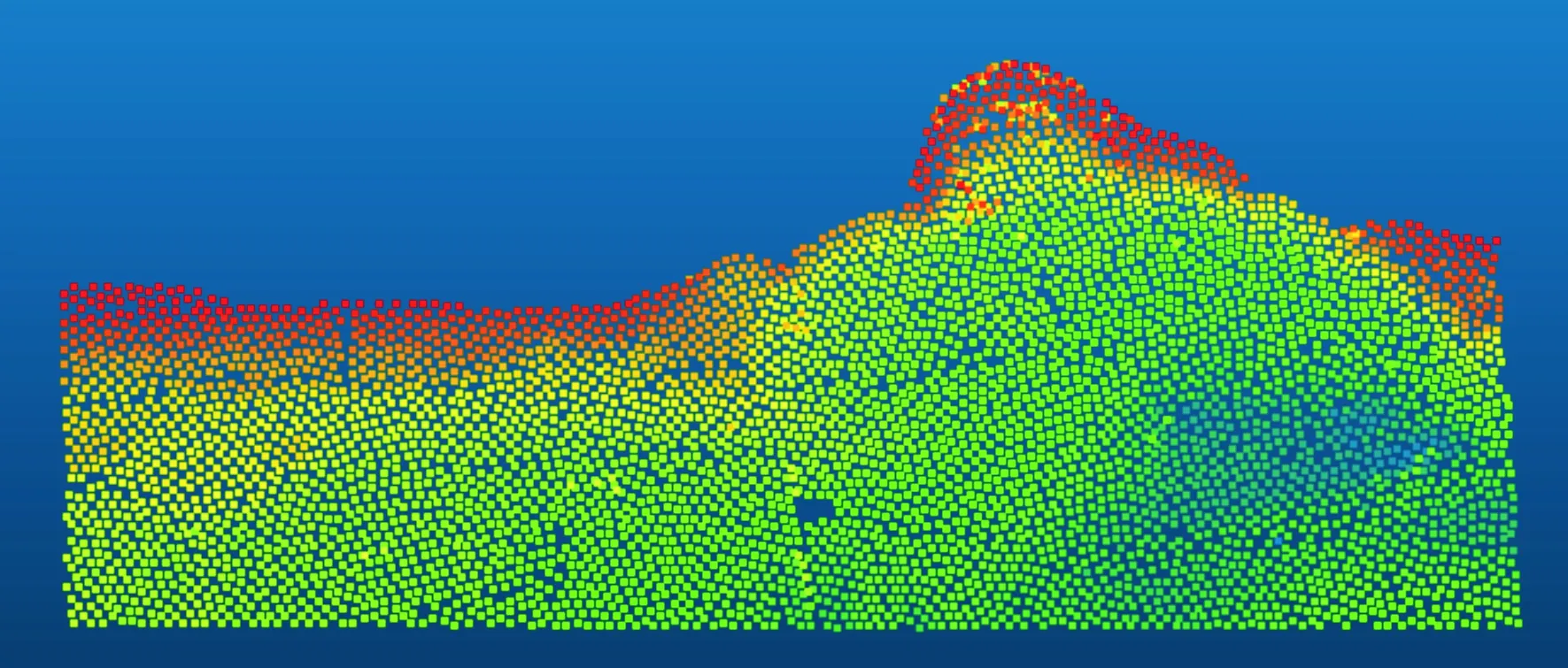
注:颜色代表深度,红色代表深度最浅,蓝色代表深度最深。
2.4 测量结果分析与验证
为了验证利用多波束测深系统进行水下测量所得数据的准确性,针对长江荆江门河段的水下地形数据进行定量分析。
传统水下地形测量的方法多为单波束测深系统打点测深[12],将多波束测深系统的测量数据与同时期单波束测深系统测量数据(图6)相对比,截取其中一段导入到Cloud Compare软件中与多波束采集到的数据作对比,如图7所示。
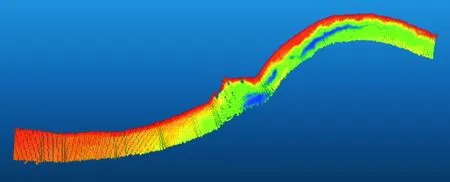
注:颜色代表深度,红色代表深度最浅,蓝色代表深度最深。
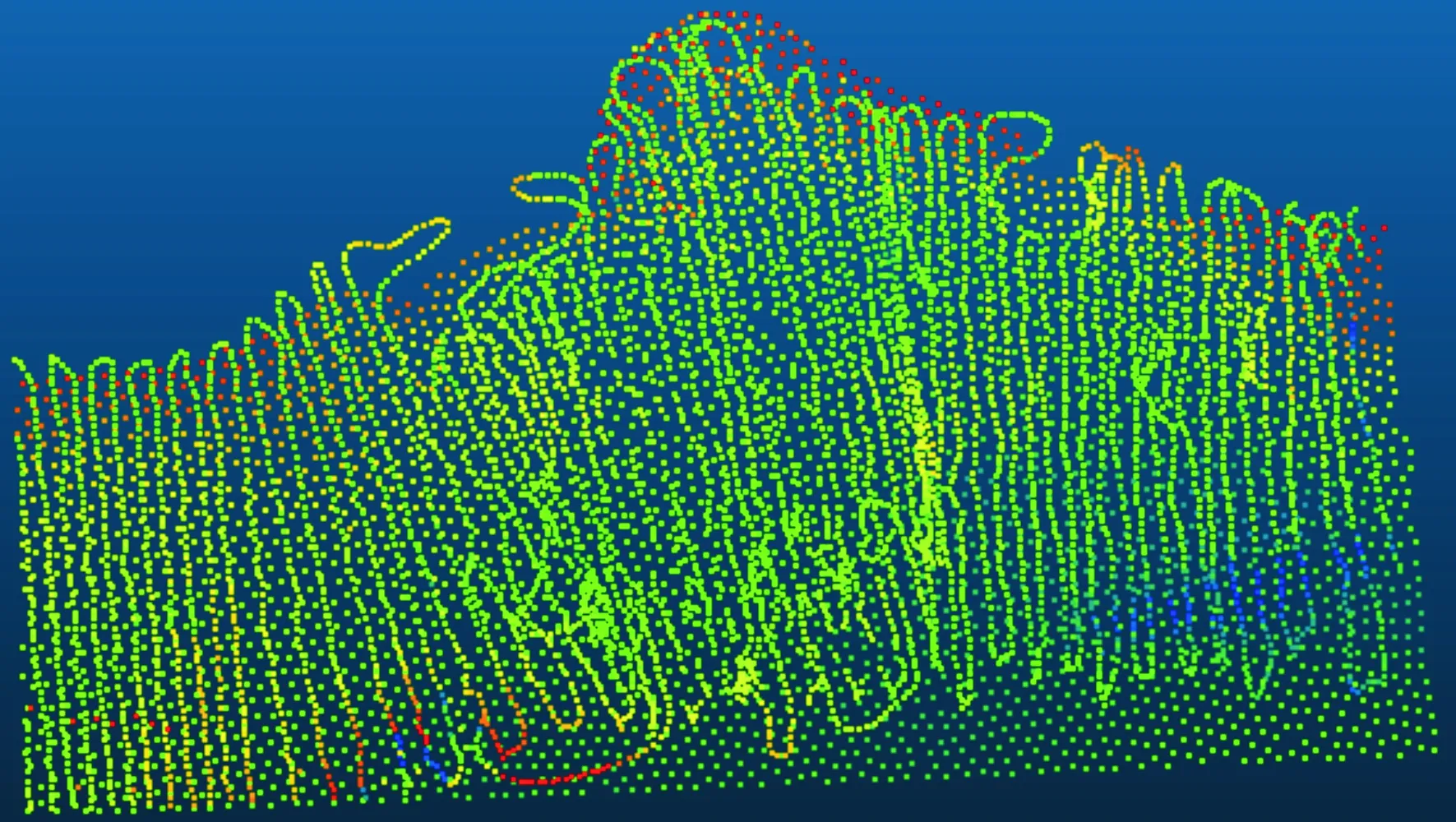
注:绿色点云区域显示出两时间段内该水底区域地形变化较小,蓝色和红色点云区域表示由于江水的冲刷使得水底地形变化较大。
图7可以看出多波束设备所测得的水底地形点云数据相比于单波束测深测得的点云数据深度变化。根据两者点云坐标取Z坐标轴上数值以及垂直深度变化数据并随机筛选20组数据作定量分析,如表3所示。

表3 多波束测深与单波束测深数据选点对比
在深度变化数据中,平均数值约为1.05 m,中位数值约为0.68 m。因此,在长江荆江门河段水底地形测量中,多波束测深系统与单波束测深所测得的地形平均差值为1.05 m,大部分的水底地形深度变化值约为0.68 m左右。
为了验证以上数据的可靠性,在多波束测深数据与打点测深数据中分别选取20个点,提取其中Z坐标值进行差异性分析,进而推断整体数据的差异性。对表3数据进行T检验,T检验的目的是利用来自两个总体的独立样本来推断差异发生的概率,从而比较两个总体均值的差异是否显著。本实验中两组样本相互独立,从一个总体中抽取一组样本对从另一总体中抽取的另一样本没有任何影响[13]。T检验的基本原理详见文献[14]。将两组数据进行T检验后得到如表4所示结果。

表4 两组独立样本T检验结果
由表4可得,由于t=0.928 另外,在软件中分别计算多波束测深系统与单波束测深系统的点云密度,所得结果如图8和图9所示;表5为多波束与单波束系统在分别进行水下地形测量时的总体效益对比。 图8 多波束测量所得点云密度分布 图9 单波束测量所得点云密度分布 表5 多波束系统与单波束系统总体效益对比 近年来,基于多波束测深系统的测量方法在水下地形测量领域受到广泛关注。该方法所用到的多波束测深平台相对于传统测量方法展现出巨大的优势,主要表现为测量时间更短,效率更高,所用设备集成度更高,使用更方便,更能保障测量人员的人身安全,以及所得点云数据密度更大、更精确。这些优点也在长江荆江门河段的地形测量中得到充分体现。利用多波束测深系统对长江不同时期的水下地形进行测量,得到长江堤岸在不同时期的地形变化,可为长江堤防修补与维护提供参考。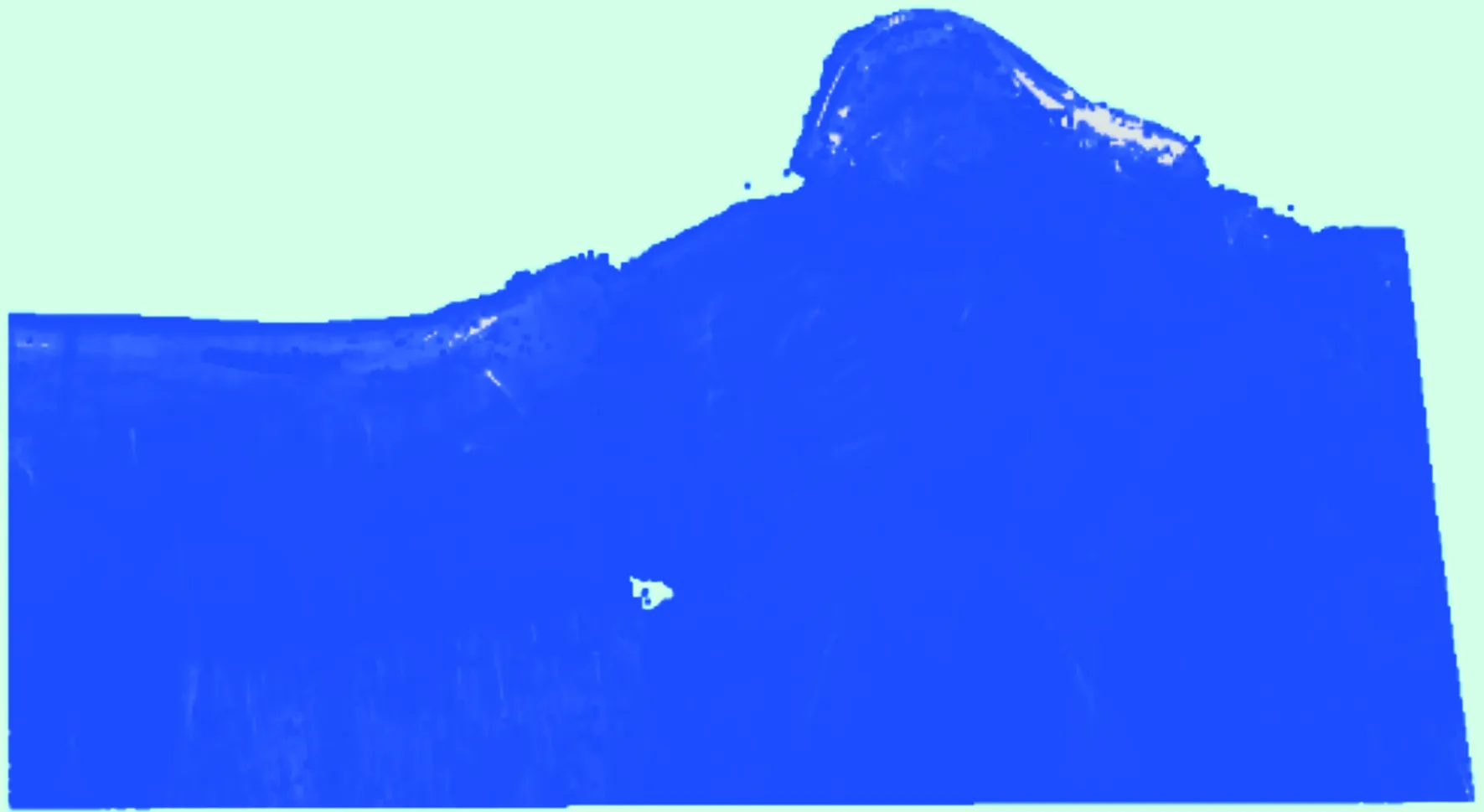

3 结 语
猜你喜欢
化工管理(2022年13期)2022-12-02
信息通信技术(2022年2期)2022-05-31
园林科技(2021年2期)2022-01-19
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
青年歌声(2020年11期)2020-11-24
舰船科学技术(2020年3期)2020-04-22
湖南文学(2019年3期)2019-04-21
天津诗人(2017年2期)2017-11-29