
一套垂直起降固定翼无人机系统开发及性能评估*
2022-12-20 12:03岳光波柳昭琰杨长坤
陕西煤炭 2022年6期
闫 勇,岳光波,柳昭琰,董 祥,李 彪,杨长坤
(1.山东唐口煤业股份公司,山东 济宁 272100;2.中国矿业大学 环境与测绘学院,江苏 徐州 221116)
0 引言
垂直起降固定翼无人机是结合常规多旋翼无人机和固定翼无人机而在近几年新兴的一种无人机[1]。与常规的固定翼和多旋翼无人机相比,垂直起降无人机兼具固定翼无人机巡航速度高、续航久和多旋翼无人机受起飞场地影响小、能够定点悬停的优点[2-3]。垂直起降无人机具有多方面的优势,应用前景较广,发展趋势较好,以后将可能发展成为一种重要的飞行器门类[4]。
目前,国内外研究团队针对垂直起降无人机的应用研究已经取得了很多成果:成都纵横自动化技术有限公司研发的CW-20无人机在塔克拉玛干沙漠绿洲处完成了超过10 000 km2的大比例尺航测任务;美国Dronetech UAV公司研制的复合四旋翼飞行器AV-2,采用全电力系统,配装自动驾驶仪,续航时间可达12 h,用于执行海上监视任务[5];德国Aerolution公司研发的SonGBIRD 500系列复合翼垂直起降无人机,能够在8级大风(风速高达20 m/s)、高温高热环境等恶劣的极端环境中正常飞行,并且有效荷载为500 g,可以搭载可见光相机、多光谱相机、近红外和热成像相机等,完成各种所需任务;垂直起降固定翼无人机在近年取得了巨大的发展[6-10]。
为此,基于无人机的配置,开发了一套多功能垂直起降固定翼无人机系统,以飞行控制系统为核心,同时协调飞机飞行平台和任务设备进行作业,并以某港口储煤盘点为例,对该无人机系统数据采集的性能和获取数据的精度进行评估。
1 系统概述
1.1 无人机飞行平台
飞行平台是整个无人机系统的基础,也是保障飞行性能的根本。飞行平台包括了机身结构、动力设备、电气系统、飞行控制系统以及任务设备等[11]。
1.1.1 机架结构
机架结构决定着无人机飞行的稳定性。目前垂直起降固定翼无人机机架结构大致可分为复合倾转式,倾转旋翼式,尾座式及动力复合式4类。动力复合式无人机的优点在于将无人机在水平方向的推进系统与在竖直方向的起降系统分离开来,2个系统分别单独作业,技术可实现性好,稳定性高,具有其余3种所不具备的独特优势。本研究采用如图1所示的“4+1”形动力复合式无人机[12]。
在图1所示的机架中,机身整个采用泡沫模具,机翼碳管加厚处理,可以承受最大8 kg的起飞重量,空速管安装在机翼前端以避开干扰气流,机身相较于其他机型容量更大,采用“8+2”集成模块,满足各种飞行任务的要求。

图1 “4+1”形动力复合式无人机
1.1.2 飞控系统
飞控系统是整个无人机的核心,其主要功能是稳定无人机的飞行姿态[13],自主或半自主的控制无人机的飞行状态和任务设备等。本次研究采用的是赫星PIXHAWK2开源飞控系,作为新一代的开源飞控系统,其核心部件——飞控计算机主要由STM-32F437(核心处理器)芯片和STM32F1(故障保护协处理器)芯片组成,在双处理器共同作用下,可以为飞行提供更为稳定的飞行方案。该系统完全兼容RTK差分GPS[14],可实现厘米级精确定位;还采用了三余度惯性导航系统即3组IMU传感器[15],其中内含3个加速度计、3个陀螺仪、3个磁罗盘以及2个气压计,为了增强其抗干扰能力和稳定性,对IMU传感器进行了减震处理,同时设置了发热电阻,使其在低温环境下依然能够保持恒温作业,大幅度提升了飞行的安全性。飞控系统硬件设备如图2所示。

图2 飞控系统
1.1.3 电气系统
电气系统是无人机的动力来源,而电池又是电气系统中的重中之重,锂聚合物电池具有重量轻、质能比高、散热好等优点,因此本次选择锂聚合物电池;同时考虑到无人机组装后的重量情况,采用标称电压为22.2V的电池为无人机供电。电池具体参数见表1。
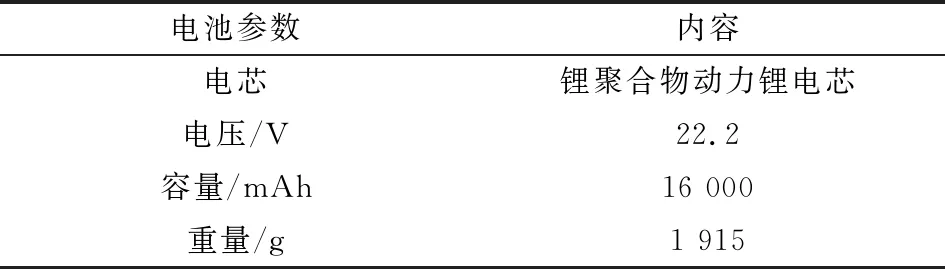
表1 电池参数
1.1.4 影像采集系统
任务设备是无人机系统的眼睛,它直接决定着飞行成果的好坏。本次研究选择了索尼A7R2相机作为任务设备来采集地面影像数据,该相机机身相较于其他相机小巧轻便,易于在无人机机舱内进行安装和固定以取得更好的拍摄效果,相机拍摄的影像分辨率为7 752像素×4 472像素,能够获得清晰的地面数据;同时还配备镜头防抖和五轴防抖技术,以保证在飞行时即使飞机遇到强风等情况导致姿态偏转时,也能够使相机稳定地拍摄地面影像。相机的具体参数见表2。
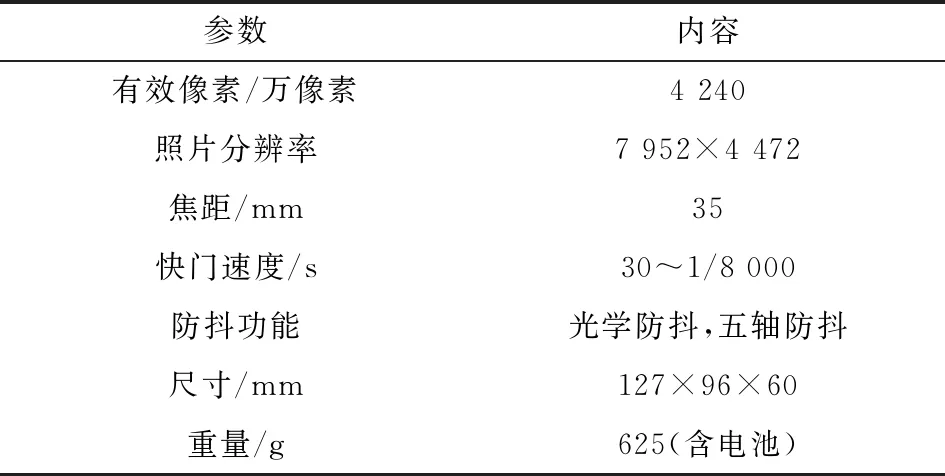
表2 相机参数
相机安装到无人机机舱内并固定好后,再通过线路与飞控系统相连,就能在作业过程中到达指定位置时通过飞控控制自动触发快门开关,获取影像。在使用原始镜头焦距为35 mm的情况下,设置航高为140 m,获取的影像数据生成的正射影像图地面分辨率能够达到1.72 cm。
1.2 地面控制站与数传电台
地面控制站和数传电台的主要作用是规划、控制、接收和监测飞行平台的运行情况。数传电台采用了XROCK数传V3模块[16],电台机身小巧,单只重量仅有22.5 g,便于携带和拆卸,同时无线通信距离可达2 km,保证在作业中实时地将飞行平台数据(空速、高度、方向等)传输到地面控制站,能够实时监测飞机的飞行状态。
地面控制站包括一套遥控系统与一台便携式计算机。遥控器用来辅助计算机完成飞行工作,拥有多个通道,可以根据任务的不同给出不同的飞行指令,当遇到紧急情况时也可使用遥控器来进行人工干预使无人机安全着陆。计算机是地面控制站的核心部分,能够对整个无人机的作业过程进行管控,任务开始前在计算机中设置好各种相关参数,无人机便会自动进行飞行任务,获取成果影像。飞行过程中飞机的状态信息能够实时地传输到计算机端并显示在屏幕上,便于操作和监管,屏幕显示如图3所示。

图3 地面控制站界面
本研究开发的无人机飞行平台可根据任务需要进行模块化定制,相较于其他公司的同类型无人机,该平台注重的是飞行时的稳定性,因而拓展性较差,同时价格远低于其他同类机型。
2 试验方案
以徐州市某港口货场储煤盘点为例,进行无人机系统飞行测试。在飞行测试前,首先使用REGIL VZ-1000三维激光扫描仪获取整个货场煤堆的三维点云数据,该仪器短距离扫描点位精度可达毫米级,长距离点位精度可达厘米级,平均点位精度为0.004 3 m[17],精度较高,因此将三维激光扫描得到的数据作为真值,该扫描仪具体参数见表3。
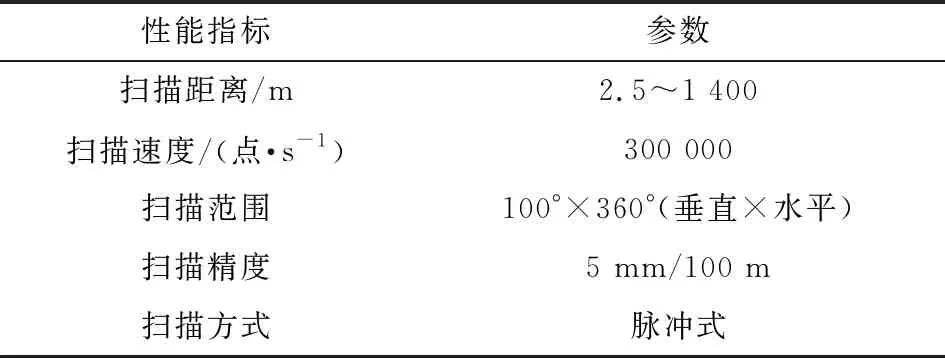
表3 REGIL VZ-1000扫描仪参数
之后进行无人机飞行试验,设置航高为140 m,航向重叠度70%,旁向重叠度60%,飞行模式为全自动模式,同时设置好航拍点等。在试验结束后,提取飞行数据得到每张照片拍摄时的高度和位置信息,就能分析得到无人机作业时的稳定性;再将原始照片进行处理生成三维模型成果数据并与三维激光扫描获取的货场数据进行精度对比,进一步分析就能得到任务成果的精度。单次飞行航线示意图,如图4所示。

图4 单次飞行航线示意
3 结果与分析
3.1 航高稳定性测试
无人机设置的航高是相对于起飞点的高度,若在理想条件下,无人机应该始终保持该高度飞行,此时飞机的高程等于起飞点高程与航高之和,将其称为理论高程,但飞机在空中作业过程中,不可避免地会受到空气摩擦阻力以及风力等的阻碍,因此飞机的高度以及姿态是不断变化的,其中飞机高度的稳定情况直接影响照片的地面分辨率从而影响成果精度,因此在飞行中保持高度尤为重要[18]。在飞行任务结束后,通过提取和转换无人机POS数据中的高程信息并与理论高程进行对比,可以得到无人机在空中的稳定状况。
无人机在空中的高度是通过气压高度计进行测量的,由于大气压强会随着海平面高度以及气温值的改变而变化,因此三者之间的对应关系能够按照公式(1)表达
Altitude=44 300×[1-(P/P0)]1/5.255
(1)
式中,P0为当前温度的海平面压强;P为所求位置的压,通过传感器采集到的温度和气压信息通过运算以及转换就能得到飞机当前的高程信息并储存在飞控系统中。实际高程与理论高程的中误差和相对误差可以按照公式(2)、(3)求取
(2)
(3)
式中,Mh为实际高程的中误差;h理论为飞机的理论高程值;hi为每一张照片拍摄时的实际高程;M相对为实际高程中误差相对于理论高程的误差。
在港口进行飞行试验时天气状况为多云,风向为东北风,风速为4.6 m/s,达到了三级风,由于设置的航线大致为东西方向,因此风力会对飞机高度保持情况产生一定影响。为了后续与POS数据中的高程信息进行对比,还需要测出起飞点的高程数据,经RTK测量并进行坐标转换得到起飞点的高程为30.86 m,由于试验时航高设置为140 m,则飞机飞行过程中理论上高程应保持为170.86 m,同时测区范围较小,将测区曲面近似看作平面,在飞行任务完成后,将POS信息中的高程信息提取出来进行坐标转换并与理论高程进行对比得到图5所示结果。
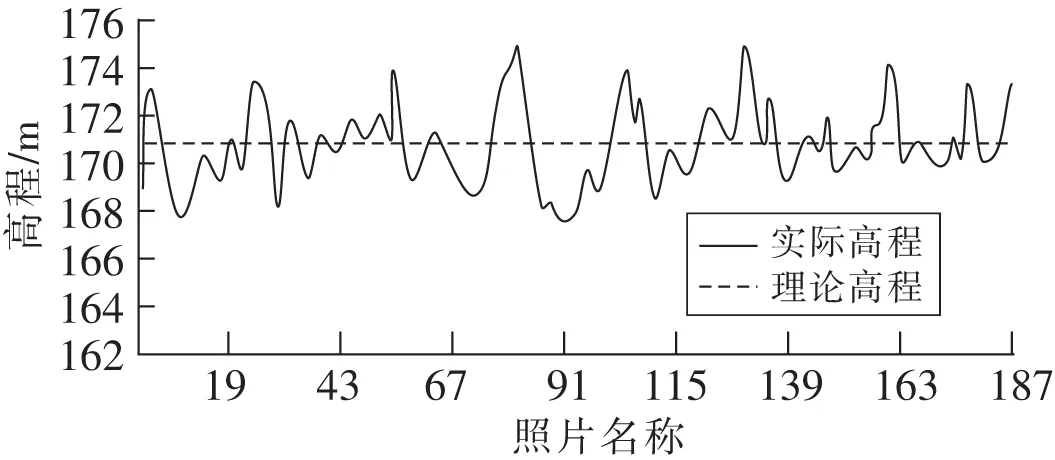
图5 照片实际高程与理论高程对比
经图5数据分析可以得到,无人机在空中作业时飞行高度是在设置的航高上下波动,并且在航线变换进行掉头转弯时高度波动较大,在飞完第3条航线转弯进入第4条航线时波动最大,此时实际高程高于理论高程3.91 m;高程最低点位于航线中部,根据地面控制站电脑端的反馈可知,是因为当时风速增大,导致飞机高度波动,最低点实际高程低于理论高程3.60 m;同时计算得到高程中误差为±1.61 m,相对于理论高程的误差为1.1%,对获取照片的质量影响较小[19],满足测量精度要求。
3.2 任务成果
本次研究选择PIX4D、Agisoft Metashape和Smart3D 3款软件来处理航拍影像[20]。PIX4D软件基本实现全自动一键处理,操作简便,处理速度相对较快较快,处理过程仅需要人工操作刺点,能够自动生成三维模型、DOM和DSM;Agisoft Metashape软件空三算法更为严密,同时将操作流程按顺序集成到一个下拉菜单中,方便操作,生成的三维模型较PIX4D更为清晰平滑,还可以进行批处理,将所需成果步骤添加到任务栏,便能一键执行;Smart3D软件是一款强大的建模软件,所建模型可操作性高,效果更好,同时能与Agisoft Metashape交互操作。将Agisoft Metashape软件进行完空三测量的文件导入到Smart3D中建立模型,得到的成果质量会更好。
飞行试验单次飞行拍摄照片357张,将飞行获取的影像分别导入PIX4D、Agisoft Metashape和Smart3D中进行处理,经过加入像控点坐标平差后得到的三维模型分别如图6、7、8所示。
图6 PIX4D三维模型主界面

图7 Agisoft Metashape三维模型主界面

图8 Smart3D三维模型主界面
3.3 精度对比
为了验证上述3款软件生成成果模型的精度,把三维激光扫描得到的货场数据视为真值,将3个影像处理软件生成的三维模型和三维激光扫描数据同一个位置相同堆形的煤堆进行体积比较,并计算出相对误差,进行分析。三维激光扫描得到的货场点云数据在软件RiSCAN PRO中经拼接、滤波、裁剪等处理后[21],如图9所示。

图9 港口货场三维激光扫描点云数据
为了保证对比结果的可靠性,4个软件计算同一货位煤堆体积时采用相同的基准面,同时为了验证无人机成果数据精度能满足于各种地形,在港口货场地面为平面、斜面和不规则平面各选取一堆煤堆进行体积计算,煤堆分别命名为平面、斜面和不规则面。以斜面煤堆为例,RiSCAN PRO、PIX4D、Agisoft Metashape和Smart3D体积计算如图10所示。

图10 4款软件计算斜面煤堆体积
3个煤堆体积和相对误差在软件中计算结果见表4。

表4 4款软件计算体积结果及相对误差
可知,当煤堆底面为平面时,由于基准面较好确定,干扰因素较少,因此计算结果精度最高;底面为不规则面的煤堆位于港口河边,同时受到树木遮挡以及基准面较难确定的影响,误差略大;底面为斜面的煤堆,体积相对误差介于上述两者之间。总体来看,使用3款影像处理软件计算得到的体积与三维激光数据计算的体积相差较小,最大误差仅为3.77%,精度较高,根据货场盘煤要求可知,该款无人机能够满足港口盘煤的精度要求。
4 结论
(1)通过将无人机获取照片时的实际高程与理论高程进行对比可以发现,飞机在作业时高度持续变化并且在设置的航高上下波动。在三级风的天气情况下,该款无人机实际高程的中误差为±1.61 m,相对于理论高程的误差为1.1%,在空中波动较小,飞行状态稳定,能够满足飞行品质要求。
(2)影像数据在PIX4D、Agisoft Metashape和Smart3D中处理后,均能得到纹理清晰的三维模型,再将三维激光扫描数据与模型数据进行体积计算对比可以发现,3款影像处理软件计算得到的体积与三维激光数据计算的体积相差较小,整体相对误差保持在4%以内,能够满足港口盘煤要求,并在成本、效率以及可适用性上优于三维激光扫描,说明该款无人机系统能够应用于货场货物盘点。
(3)为了使无人机在空中能够更加稳定地获取照片,可以在航线之间添加航点,让飞机更加平稳地进行航线转变进入新的航线,这样在航线转变的航高波动就会大大减小;被树木遮挡的部分影像在生成密集点云时导致地面出现的空洞,可以使用三维激光扫描的点云进行修补,提高体积计算精度。
(4)经过港口盘煤项目,验证了该款垂直起降无人机的性能以及精度的可靠性,在后续的实际应用中,将会根据需求对此无人机进行升级和进一步开发,使其能够满足更多的任务要求。
猜你喜欢
减速顶与调速技术(2022年3期)2022-02-11
能源工程(2021年2期)2021-07-21
河南工程学院学报(自然科学版)(2021年2期)2021-07-03
当代陕西(2020年23期)2021-01-07
中国工人(2020年5期)2020-11-17
哈尔滨铁道科技(2020年2期)2020-11-16
矿业安全与环保(2020年5期)2020-11-03
铁道通信信号(2020年4期)2020-09-21
铁道通信信号(2018年6期)2018-08-29
消费导刊(2017年8期)2018-01-18
