探究有源电力滤波器中的重复控制
2022-12-14 06:09:04李金元
电工材料 2022年6期
李金元
(三峡大学,湖北宜昌 443002)
引言
对于整个电网而言,当非线性电力用户负荷出现后会产生谐波电流,电网电压发生畸形的几率较高,严重影响了同线路相关用户的电力质量。长时间以来,在电力系统中谐波治理问题都是一项十分关键的任务。传统谐波治理处理方式,主要是采用以LC无源元件为核心的谐振装置,将其进行并联,利用无源支路完全吸收低阻特性的谐波。谐振条件对线路阻抗的影响较为深刻,很容易因为失谐致使滤波效果差强人意。随着PWM技术、全控性电力半导体器件的日益成熟,各种新型电力谐波治理装置不断涌现,其中具有代表性的是有源滤波器(APF)。重复控制这种控制算法主要是以内模原理为基础,其可以精准跟踪周期性的参考信号,具有实现难度小、结构简单的特点,因此积极运用于有源电力滤波器中。
1 重复控制的基本思想
重复控制属于一种控制思想,其主要以内模原理为基础。内模是处于稳定的闭环控制系统中囊括外部输入信号的数学模型。内模原理对于一个控制系统来说,若是对其进行控制的反馈从被调节的信号中而来,这时内控外部信号动态模型已经包含在反馈回路中,整个系统均具有稳定的结构[1]。内模原理则是将系统外部信号相关动力学模型引入到控制器中,组成精度更高的反馈控制系统。此系统可以对输入信号进行无静差的跟踪。就全部的无静差系统来说,均有此问题存在,也就是当输入信号接近0时,怎样确保控制信号能够继续输出,使适宜的控制作用得到有效维持。这时候尽管反馈、给定信号依然存在,然而误差信号则是零,那么系统信号通道则完全断开,输出和输入没有关系。面对这一情况,控制器应将外部干扰或指令的模型纳入其中,对信号输出进行积极控制。从此角度而言,内模作用于信号发生器较为相似,控制信号时禁止引入外部变量。
2 重复控制的优化
重复控制器拥有简洁的结构,具有极好的稳态性,主要运用于周期输入、扰动控制及跟踪环节中。在重复控制中,内模占据着极为重要的位置,其可以促进控制性能有效提升[2]。对于全部谐波频率而言,经典内模效果突出,可以对各次谐波进行补偿。但其也具有延时性的问题,通过一个基波周期后,重复控制器才启动,几个周期后才能看到效果,而在此时间段,不能合理解决电网质量。所以,需要对传统重复控制予以健全。
2.1 选择性重复内模
为减少延迟时间,预防无谐波频段测量产生较大噪声,通过优化后出现了“选择性重复控制内模”,其可以补偿部分次谐波。对特定次谐波进行补偿的内模,如图1所示,为了有选择性地进行补偿,在前馈路径上恰当位置安装DFT滤波器装,超前相位则可以在设计阶段借助Na展开调整。虽然存在宽带的制约情况,然而这种控制方式能够完全将选定的波次进行补偿。
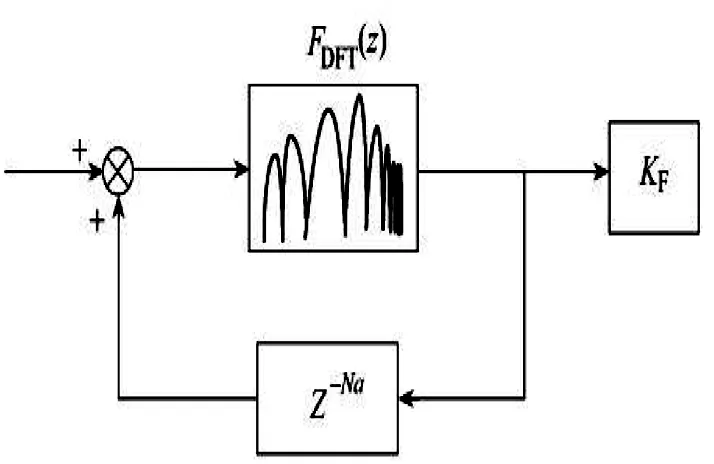
图1 对特定次谐波进行补偿的内模
三相系统具有对称性,所以只存在奇次谐波[3]。就此情况,可对奇次谐波内模进行有效补充,如图2所示,可嵌入重复控制器,在离散域中跟踪奇次谐波电流。对于不必要的频率,这方法不会产生高增益,所以鲁棒性也得到了优化,同时延迟时间缩短到二分之一各基波周期。立足于此,将遗忘因子Kf引入,借助增加阻尼可以提升控制器的鲁棒性。
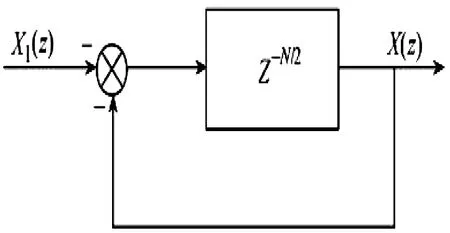
图2 对奇次谐波进行补偿的内模
对于反馈环节而言,积极引入修正,选择在每两个极点处设定一个零点,以此在整体上提高系统的选择特性,促进增益以及提升灵敏度。就三相整流电路形成的6k-1的负序量以及6k+1的正序量此特点,将dq坐标系下的选择性内模提出,在运用上述谐波补偿中,这种内核结构十分单一,更容易设计,且能够对延时时间补偿予以有效控制,可以快速作出响应。补偿nk±m次谐波的内模,相较于传统内模,可以选择性地补偿谐波,同时占用的数据存储更小,可以快速收敛误差,但内模结构具有一定的复杂性。
2.2 非整数延时内模
出于对数据存储的考虑,在数字重复控制系统中,采样频率、参考信号基波周期频率的比例应该是一个整数。而实际上,当电网频率发生改变,但采样频率没有变化的时候,容易导致比值不是整数,即便是取整,也难以保障重复控制的稳定性保障。
补偿6k±1次谐波的内模,如图3所示,当内模的N/6拍延时不是整数的情况下,在全部延迟环节中设定一个分数延时滤波器(FIR-FD),采用拉格朗日插值法高效率、精准地计算出滤波器相关参数,然而这些数据会对内模性能造成严重影响,鲁棒性较差。所以,可以在内模中引入滤波器,且以拉格朗日插值法为主,以确保系统可以精准跟踪,促使THD降低。
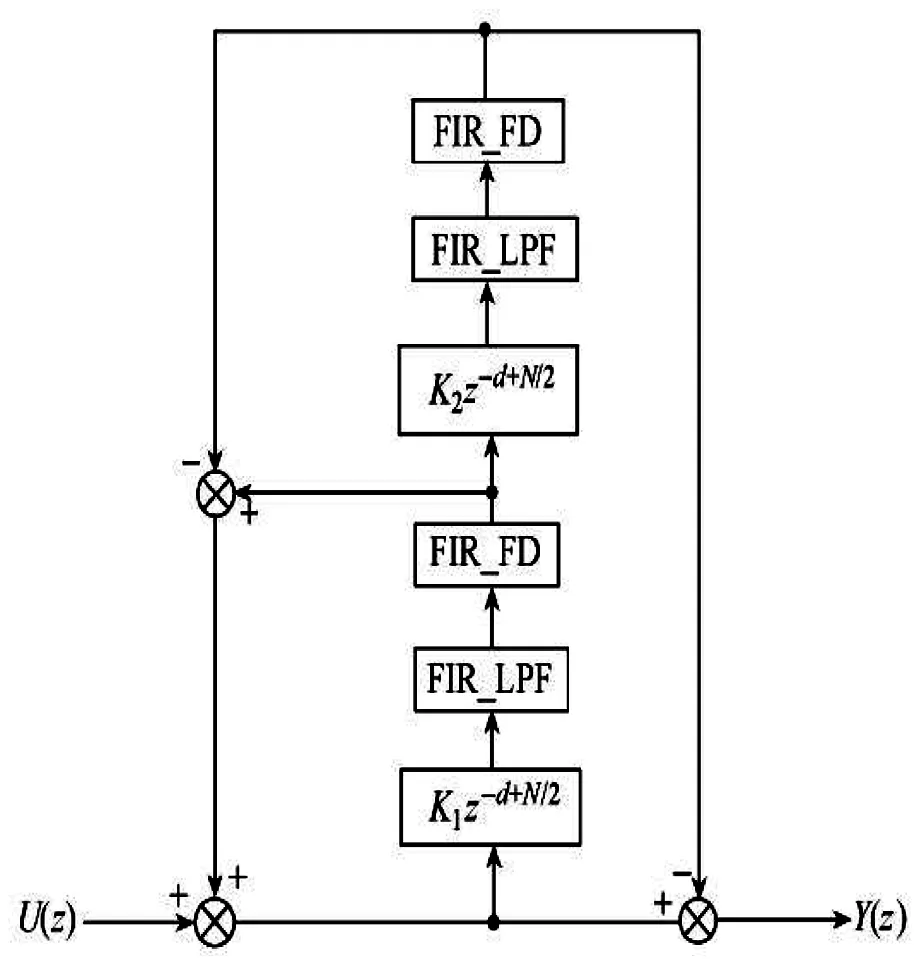
图3 对补偿6k±1次谐波内模的改进
2.3 负反馈内模
对于重复控制这问题,刚开始主要使用正反馈内模形式,然而在补偿奇、偶次谐波方面均有所缺陷:可能会使相移发生改变,这就需要采用其他的滤波器,进而在一定程度上增多了设计成本。所以,可采取带负反馈结构的重复控制方式,积极补偿谐波。在电力系统中,补偿奇次谐波的实用性较强。正、负反馈的对比见图4,通过图4可知,因为负反馈将奇数次谐波视为一种指令信号,延时短、储存空间少等优势明显,节省了成本。
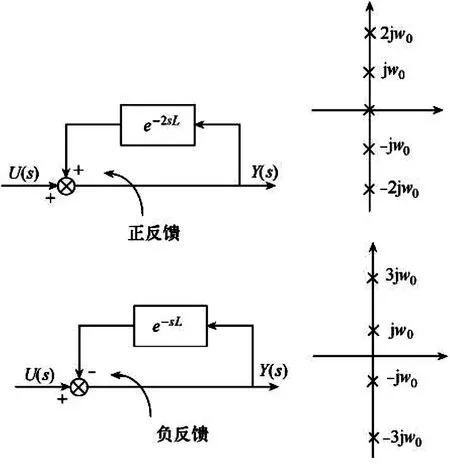
图4 正负反馈及奇点对比图
2.4 模拟形式内模
现阶段,相关学者重点分析了重复控制内模,研究范围不再仅限于数字方式,模拟方式也得到了较好发展。例如,用于实现延迟的模拟集成电路(IC),其主要由电感器与电容器构成。以此构成的电路还被称之为低噪声斗链式延迟(BDD)电路,能够顺利转变为精准延时电路,具有较高的信噪比,延时时也不会影响精度。
3 复合控制
要想确保重复控制展现出最佳效果,需与其他控制方式关联,然后应用到有源电力滤波器中。其一,与无差拍控制相结合,对无差拍形成的控制偏差进行修正,进而顺利获取到下一拍的输出电压,采取滞环、双滞环控制方式,有效解决重复控制动态性能不足的情况;其二,与带积分状态反馈结合,然后设计输出电压控制方案,可确保动态特性、精确度;其三,与有源阻尼结合形成的控制方式,能够在确保系统稳定以及稳态精度的基础上,制定科学合理的设计方案;其四,与PI控制并联,且巧妙地使用到有源电力滤波器中。如果指令电流突然出现变化,PI控制会第一时间做出响应,跟踪指令,并重复控制,以此来有效避免稳态误差的出现,这样除了能够展现出重复控制稳态精度高的特点之外,还能够彰显出PI控制动态速度迅速的特征[4]。这一种复合控制方法值得广泛推广。
4 结语
现阶段社会能源缺口逐渐加重,进而对高效清洁能源提出了更多的需求。在此背景下,能源生产与运用极其关键,电力电子技术是一种典型的清洁能源技术,发挥着重要作用,但电力电子会形成谐波,不利于其发展。所以,需加强对谐波的治理。在有源电力滤波器中运用重复控制可实现对谐波的有效治理。通过分析有源电力滤波器中的重复控制,以此来确保电力行业可持续健康发展。
猜你喜欢
自动化仪表(2020年10期)2020-11-13 03:31:00
通信电源技术(2018年3期)2018-06-26 08:05:48
火控雷达技术(2016年3期)2016-02-06 02:30:40
四川电力技术(2015年5期)2015-12-19 11:04:52
船舶力学(2015年6期)2015-12-12 08:52:20
广西文学(2015年9期)2015-10-24 03:53:14
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12
汽车维护与修理(2014年10期)2014-02-28 12:15:01