虚拟阻抗的无电压传感器并网逆变器控制
2022-12-13 01:19艾永乐潘智航杜明珠李港星
重庆大学学报 2022年11期
艾永乐,潘智航,杜明珠,李港星
(河南理工大学 a.电工电子实验中心;b.电气工程与自动化学院,河南 焦作 454150)
近年来,随着新能源发电技术的不断发展,能源危机和环境问题得到了缓解。新能源发电正朝着规模化和产业化的方向发展,其装机容量在电力系统中所占比例越来越高[1-3]。并网逆变器作为新能源发电系统与电网之间连接的关键部分,其稳定性直接影响到新能源发电并网系统的可靠性[4]。虽然逆变器具有一定的灵活性和可控性,但是并网逆变器主电路是由电力电子器件组成,在运行时易产生谐波,并且在并网时需要电压传感器提供同步信号。
在早期主要是通过在逆变器输出端添加接口电感或LC(LC, inductance capacitance)低通滤波器进行滤波,并提供理想的电压同步点[5]。为了达到更好的滤波效果,有不少学者对滤波器的结构进行了改进,目前主要使用LCL(LCL, inductance capacitance inductance)型和LLCL(LLCL, inductance inductance capacitance inductance)型滤波器,其中LCL型滤波器在并网逆变器中具有更好的滤波性能与稳定性,而LLCL型滤波器更多时间用于单相并网逆变器[6-7]。但是,滤波器会给系统增加额外的体积和功率损耗。随后,又有学者提出了无电压传感器的控制策略,文献[8]采用基于积分谐振电流控制的电网电压估计器,可以在无电压传感器的情况下来重构电网电压。但系统中的LCL滤波器会增加额外的体积。文献[9]研究了基于模型预测控制的无电压传感器控制策略,但每个控制周期仅采用一个电压矢量作用,会产生较大电流谐波。在此基础上,文献[10]提出一种基于改进型滑模观测器的电网电压在线观测方法,以实现无电网电压传感器控制。但是,无电压传感器控制方法通常依赖于线路阻抗数据,而这些数据在并网系统中很难获得。
近些年,虚拟阻抗在并网逆变器的控制系统中得到了广泛应用,文献[11]介绍了目前虚拟阻抗的不同实现方式,对基于虚拟阻抗控制的逆变器进行了系统的总结。文献[12-13]分别从不同方面对虚拟阻抗技术进行全面的介绍,结合自适应虚拟阻抗这一研究热点,探讨了未来的研究趋势和可能遇到的关键问题。但是,很少有文献研究虚拟阻抗在消除接口阻抗和电压传感器方面的应用。
针对以上问题,在逆变器控制系统的基础上,提出了用虚拟接口阻抗代替接口阻抗以及移除电压传感器实现自同步的方法,解决了在启动过程中使用电流传感器进行同步的问题,仅使用虚拟电阻进行自同步的方法,用来降低dq-电流控制算法的计算复杂性。通过仿真和实验结果,验证了这些方法的稳定性和动态性能。
1 并网逆变器系统模型

根据图1可知,逆变器输出电压表达式为
(1)
经过Park变换之后,可得dq坐标系下的三相逆变器的输出电压方程:
(2)
2 基于虚拟阻抗的无电压传感器系统原理
虚拟阻抗可以模拟接口阻抗实现对并网逆变器的控制。如图2所示,在电压型逆变器控制中,电流作为输入信号,获得虚拟阻抗ZVI上的压降,将逆变器的输出电压vI变为v′I,其表达式为
v′I=vI-ZVIi。
(3)
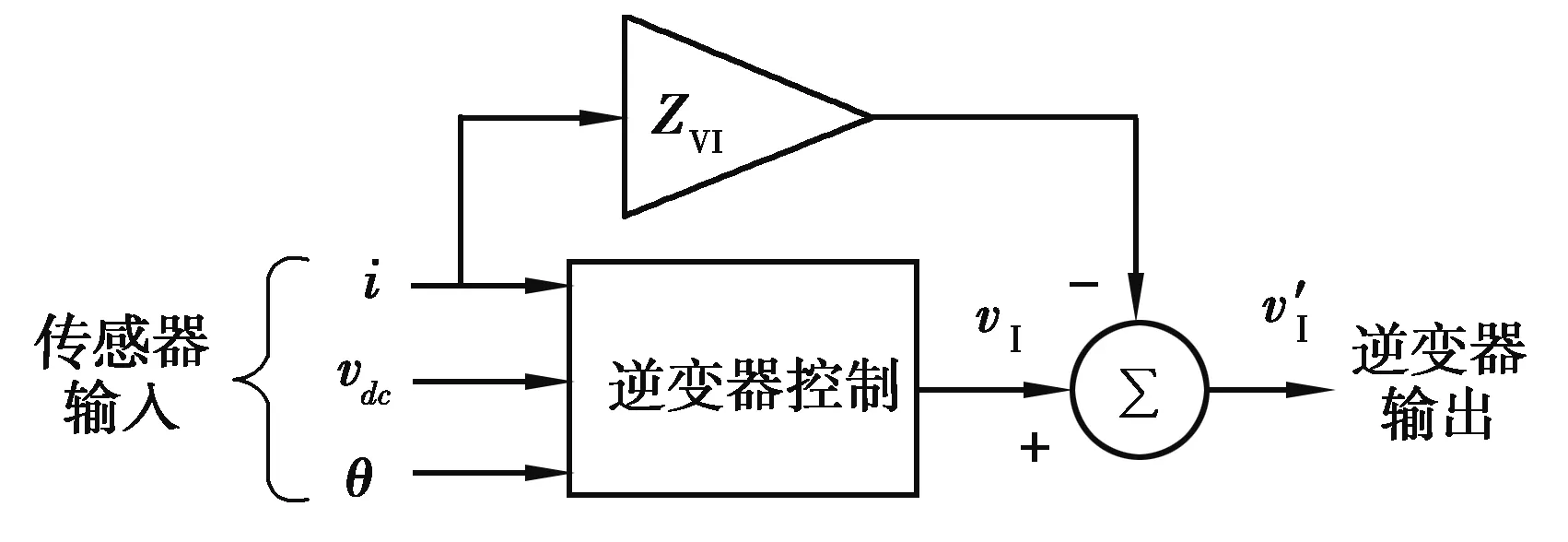
图2 基于虚拟阻抗的逆变器控制框图Fig. 2 Inverter control based on virtual impedance
假设逆变器的实际输出电压vI中没有谐波,就可以用虚拟阻抗代替实际接口阻抗来产生压降。用逆变器的输出电压vI(由dq-电流控制计算)减去虚拟阻抗上的压降,生成新的输出电压v′I,并将该电压作为传感点电压,即vS=v′I。
实际上,逆变器受PWM (PWM, pulse width modulation)控制信号驱动会产生大量谐波。但是,PWM模块的输入是逆变器电压的基波分量,所以可以将输入信号当作传感电压,直接反馈到控制系统中。因此,笔者提出了基于虚拟阻抗的无电压传感器的并网逆变器控制方案,其控制框图如图3所示。
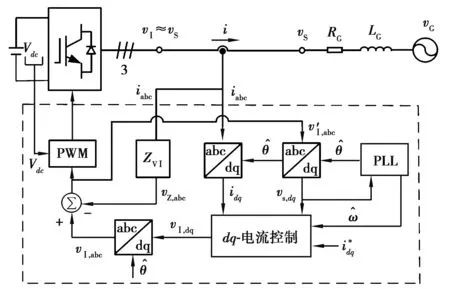
图3 基于虚拟阻抗的无电压传感器的并网逆变器控制框图Fig. 3 Virtual impedance-based control for grid-connected inverters without voltage sensors
通过该控制方案,可以移除接口阻抗和电压传感器。但是,在没有电压传感器提供同步信号的情况下,逆变器在启动瞬间可能会产生同步问题。
为了解决逆变器启动同步问题,文中通过在逆变器交流侧的B相和C相之间接入电容CSU、开关SSU和电流传感器,形成闭合回路。其结构如图4所示。
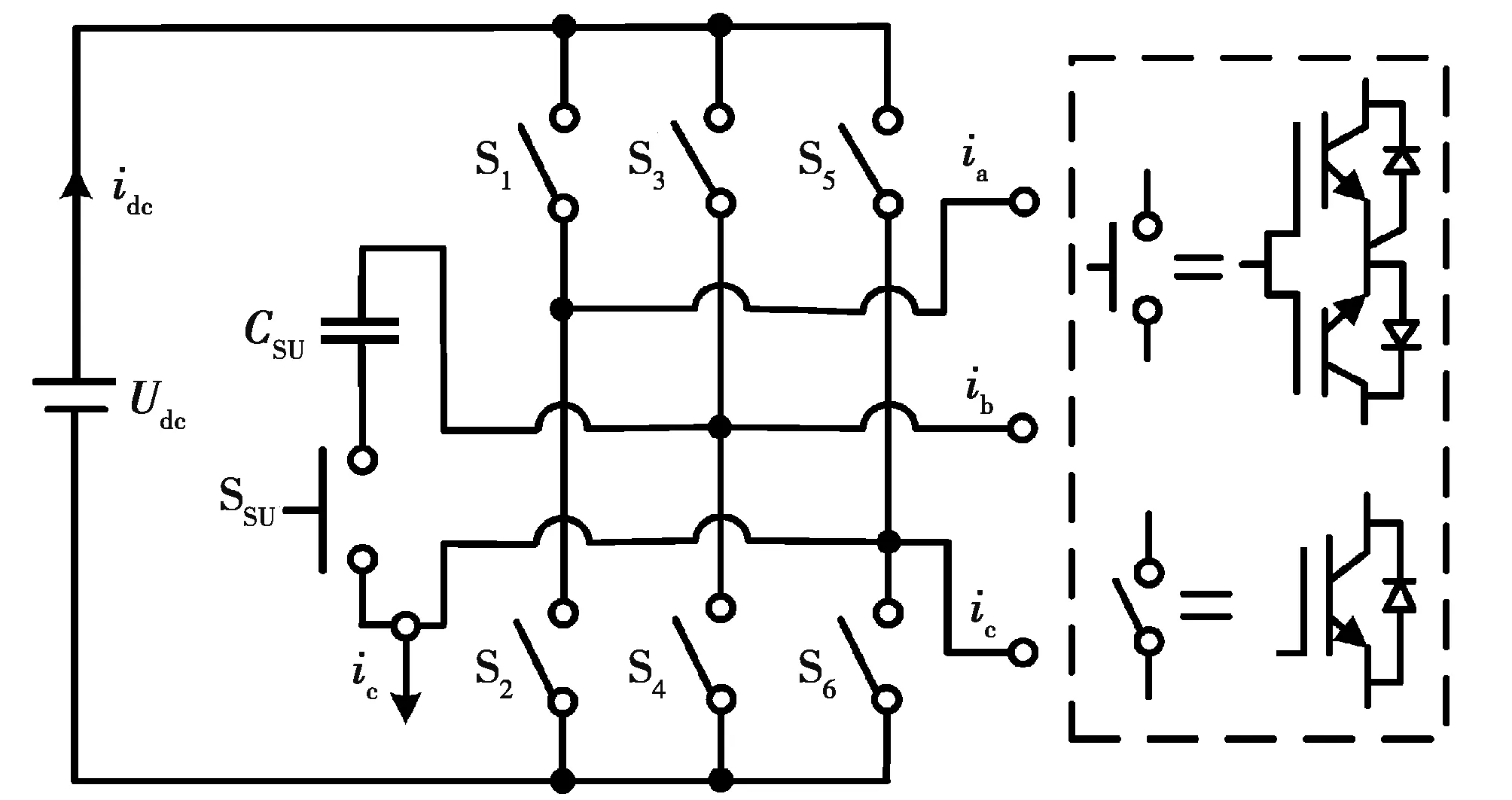
图4 启动同步的电容负载结构图Fig. 4 Structure diagram of capacitive load for start-up synchronization
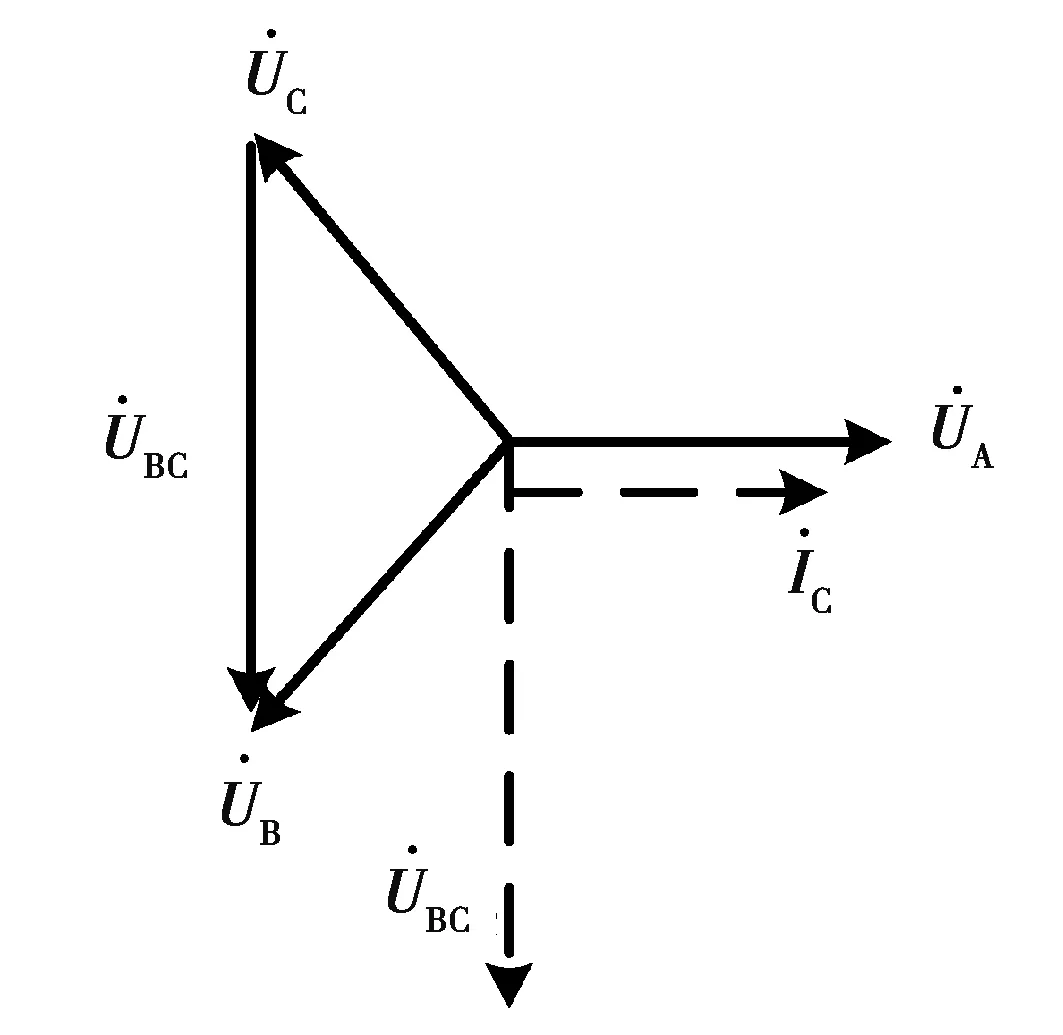
图5 相位的变换原理Fig. 5 Transformation principle of phase
在逆变器启动过程中,开关闭合,将产生电容电流,通过电流传感器采样获得ic,可由单相锁相环获得与A相电压相同的相位。其原理如图5所示。在同步后,开关SSU自动断开,逆变器控制部分开始产生PWM控制信号,同时启用自同步算法。
为了检测电网电压幅值,可以选择合适的电容CSU,来获得相应的电流,然后计算出电网电压幅值。假设相电流峰值Im(等于电容电流)可以限制在250 mA左右。那么在50 Hz的电网上产生峰值电流为250 mA,并且线电压有效值为380 V时,所需的电容值为1.48 μF,计算公式为
(4)
单相同步锁相环算法的控制框图如图6所示[15]。一旦检测到电流幅值后,就可以通过式(4)计算出电压的幅值。
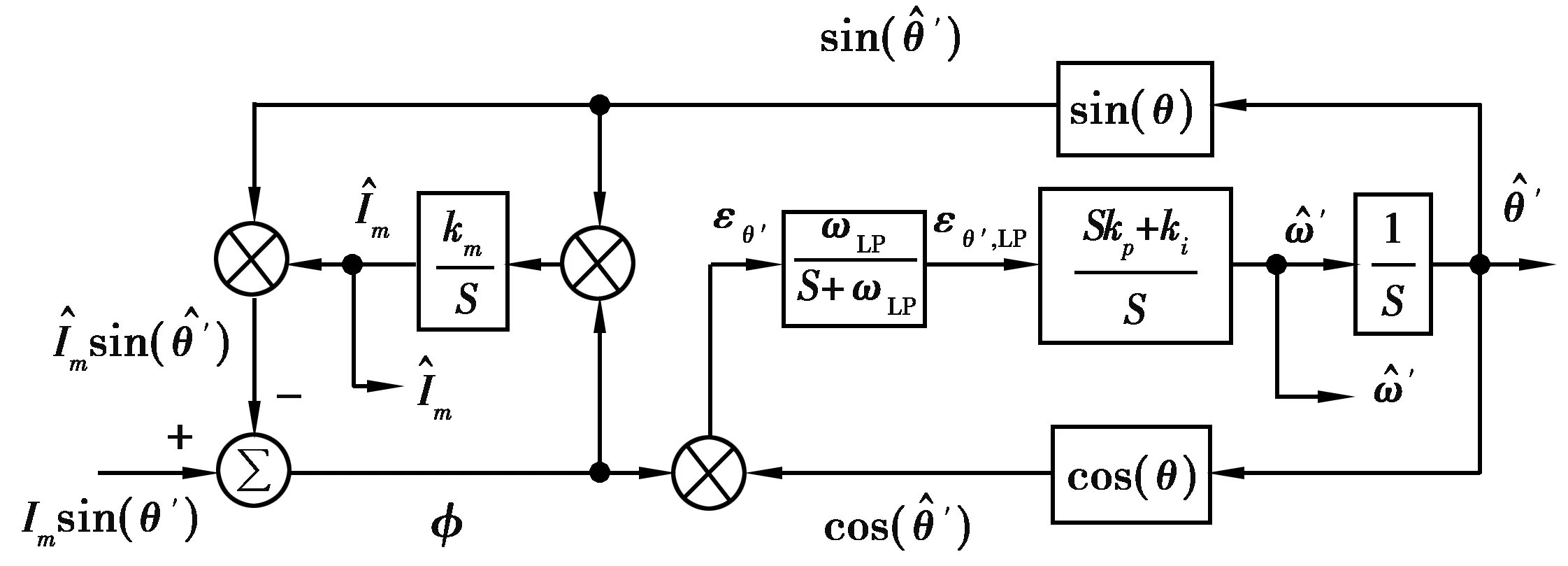
图6 包含幅值检测的单相同步锁相环算法框图Fig. 6 Single-phase synchronous phase-locked loop algorithm with amplitude detection
3 虚拟阻抗控制系统模型
3.1 主电路动态建模
由图3可知,根据KVL定理,主电路的数学表达式:
(5)
经过park变换后,主电路在dq坐标系下的微分方程为
(6)
3.2 虚拟阻抗建模
虚拟阻抗上的电压表达式为
(7)
式中,ωC为高通滤波器的截止频率。应用拉普拉斯变换的频移特性,经过park变换得式
(8)
式中,再次引入了一个复杂的低通滤波器。为了适应该低通滤波器,定义附加变量idq,LP,来表示旋转坐标系下低通滤波器电流。使用此低通滤波器变量得
(9)
低通滤波器的输入idq和输出idq,LP之间的关系为
(10)
将式(10)代入到式(9)中,可以获得dq坐标系下虚拟阻抗电压的总表达式
(11)
3.3 PID控制器建模
对dq-电流控制中的PID控制器进行建模。从PI控制器开始,由于电流的积分产生电荷,可以定义2个变量Qd和Qq,分别表示电流误差信号εd和εq的积分。定义为
(12)
由于无电压传感器的虚拟阻抗控制算法在控制环路中加入了少量的微分增益以保证稳定性,所以可以在建立的模型中使用高增益的高通滤波器来实现微分。定义2个变量,即电流误差信号的低通滤波值εd,LP和εq,LP为
(13)
式中,ωD是高通滤波器的截止频率。PID控制器的微分项可以表示为
(14)
将定义的变量代入式 (3),可得简化后的逆变器输出电压
(15)
3.4 锁相环建模
文中所用到的锁相环主要有单相锁相环和三相锁相环。对单相锁相环进行建模,定义变量εθ′,LP为低通滤波相角误差信号:
(16)
定义变量δ来表示低通滤波相位误差信号的积分,对δ进行微分,可得单相锁相环的微分方程:
(17)
(18)
对三相锁相环进行建模,定义一个变量γ,来表示相位误差的积分。对γ进行微分,可以得到三相锁相环的微分方程
(19)
(20)
3.5 虚拟阻抗线性系统模型
在前几小节中定义了附加状态变量之后,建立各个模块的代数方程,将各种值与状态变量联系起来,用式(6)、(10)、(12)、(13)、(19)组成一个微分方程组来表示逆变器系统。可知该系统是一个9阶的非线性动态系统。
为了验证该非线系统的稳定性,可以运用Lyapunov特征值估计法,通过系统在平衡状态下的雅克比矩阵的特征值来判断系统的稳定性。在平衡工作点处利用交流小信号线性化的方法对系统进行线性化处理,线性化后的系统可表示为
(21)
式中:矩阵A是雅可比矩阵;状态变量为Δx=(id,iq,id,LP,iq,LP,Qd,Qq,εd,LP,εq,LP,γ)T;B为输入矩阵;u为输入变量矩阵。
在平衡点处的雅可比矩阵A为:
(22)
求解该矩阵的特征值,可得所有特征值均满足Re(λi)<0,即雅可比矩阵的特征值均在复平面的左半平面,满足有界输入有界输出稳定性的定义。因此,该系统具有很好的稳定性。
4 虚拟电阻简化电流控制
为了降低虚拟电压计算的复杂性以及简化dq-电流控制,此处选择纯虚拟电阻。
简化的dq坐标系下的虚拟阻抗控制系统模型如图7所示。dq-电流控制仍可通过PID控制器来完成,控制器中的微分项是确保稳定性所必须的。由于现在的虚拟阻抗只是一个电阻,因此动态也会发生变化。
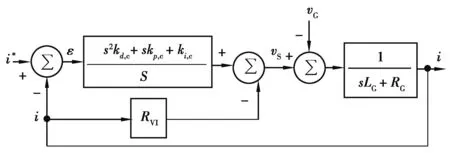
图7 虚拟电阻控制算法的动态系统模型Fig. 7 Dynamic system model of virtual resistance control algorithm
在图7中,感应点电压的正反馈回路已被简化,该系统的闭环传递函数为
(23)
令分母多项式为零,得二阶系统的特征方程分:
s2(LG+kd,c)+s(RG+RVI+kp,c)+ki,c=0。
(24)
其2个根(系统的极点)为:
(25)
上述二阶系统的特征根表达式中,阻尼比恒大于零,即特征根S1和S2均有负实部。因此,该系统具有一定的稳定性。
5 仿真与实验
5.1 仿真验证
为了验证文中所提出的基于虚拟电阻自同步的无电压传感器控制策略,在Matlab/Simulink中建立了系统的仿真模型,如图8所示。
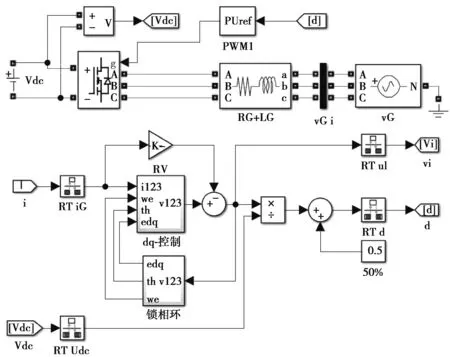
图8 基于虚拟阻抗补偿的无电压传感器的并网逆变器仿真框图Fig. 8 Simulation of grid-connected inverter without voltage sensor based on virtual impedance compensation
仿真系统的参数如表1所示。仿真中,电网相电压幅值(有效值为30 V)和逆变器直流母线电压幅值(100 V)均比正常值小。因为小电流可以增加阻抗对控制系统的影响。调整dq-控制的Tstl,c=50 ms,使电流过阻尼。同时,调整锁相环的Tstl,θ=100 ms,使其有一个临界阻尼。
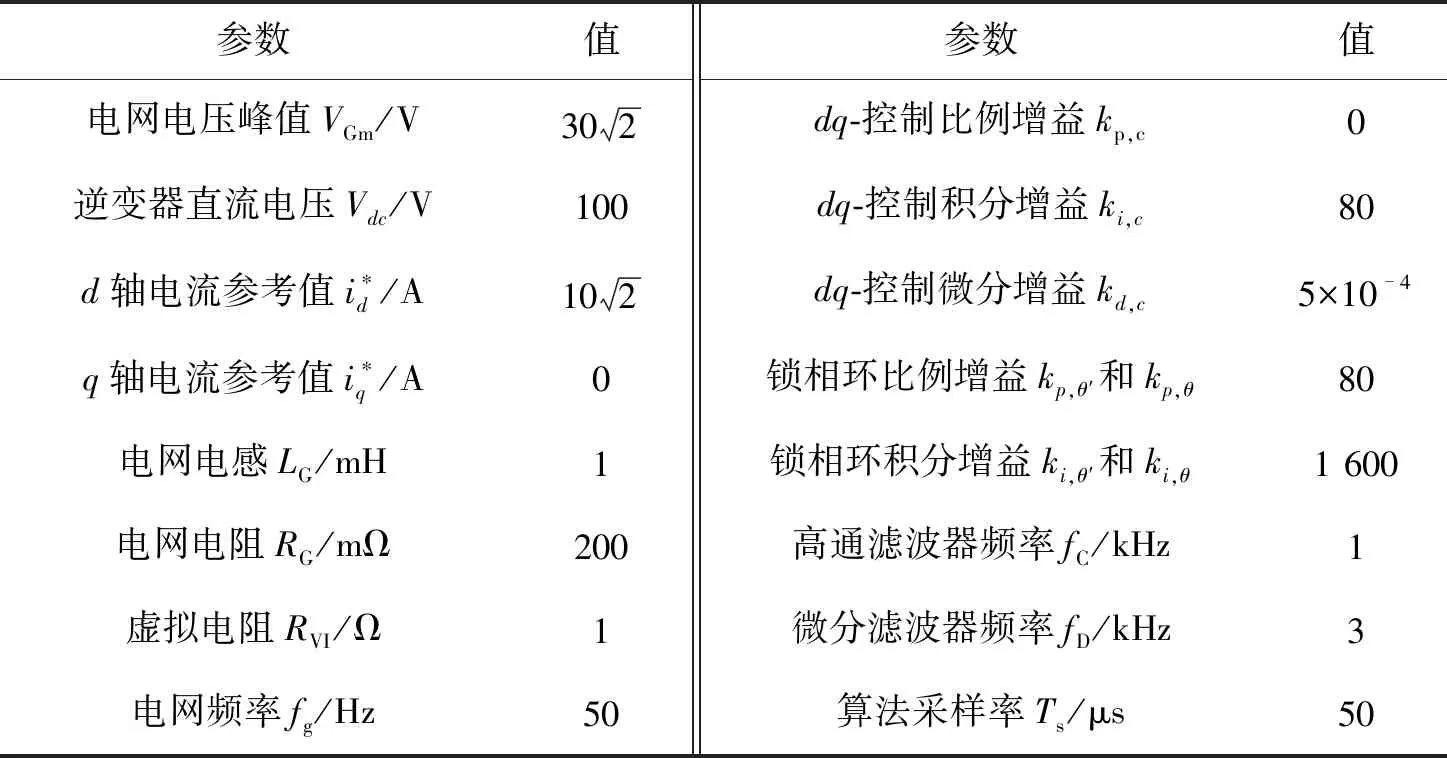
表1 虚拟电阻的仿真主电路参数Table 1 Main circuit parameters of virtual resistors in simulation
在仿真模型中分别施加3种不同的电网扰动。
图9显示了t= 125 ms时,电网频率变化-5 Hz的仿真结果。
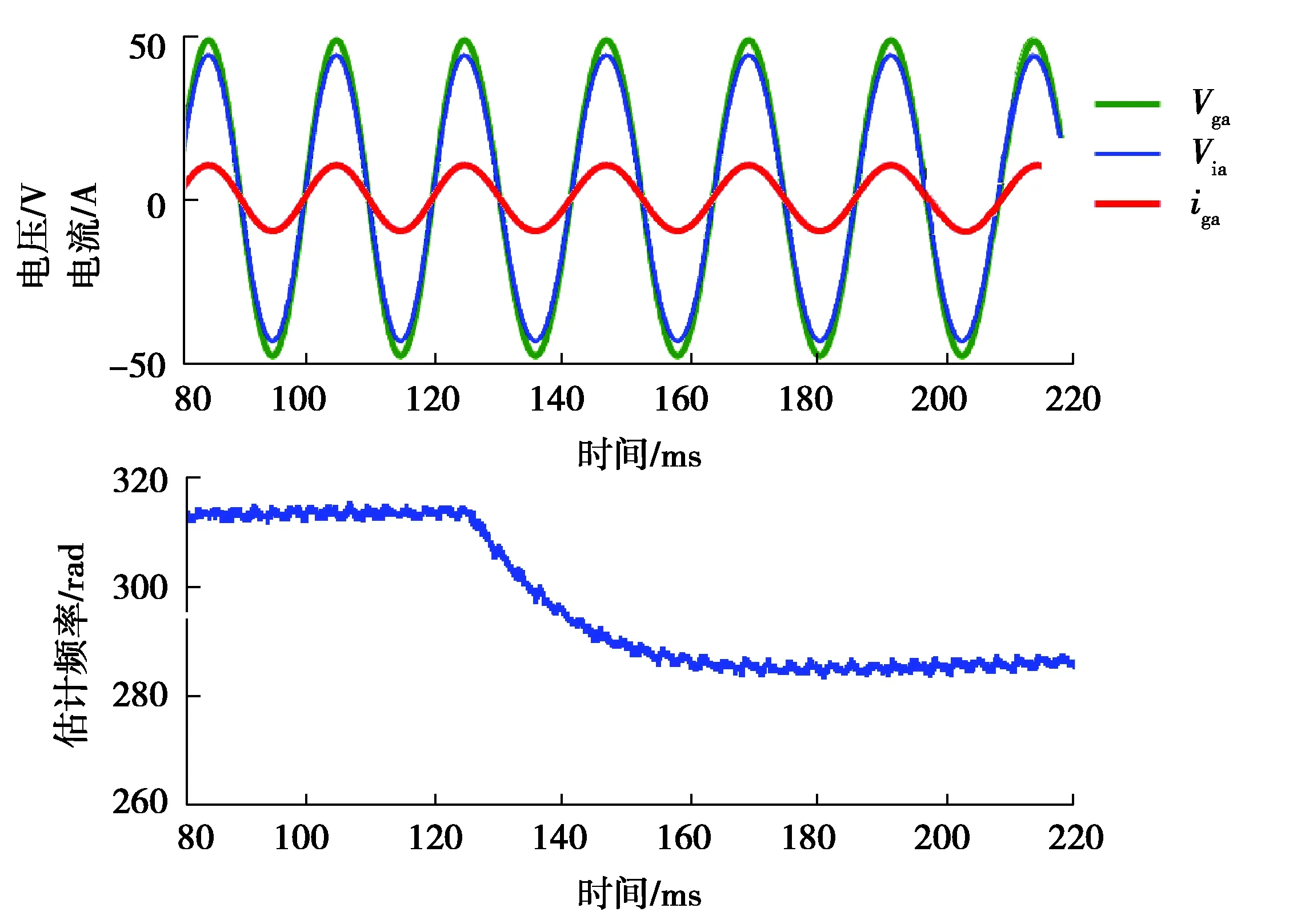
图9 t = 125 ms时,电网频率变化-5 Hz的仿真结果Fig. 9 Simulation results for grid frequency change of -5 Hz at t = 125 ms
图10显示了t= 145 ms时,相角阶跃10%(36°)的仿真的结果。
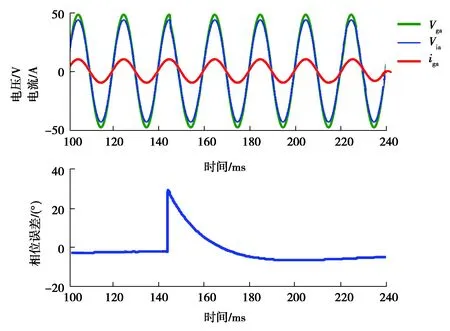
图10 t = 145 ms时,相角阶跃10%(36°)的仿真的结果Fig. 10 Results of the simulation with a phase angle step of 10% (36°) at t = 145 ms
图11显示了t= 165 ms时,电网电压下降10% 的仿真的结果。
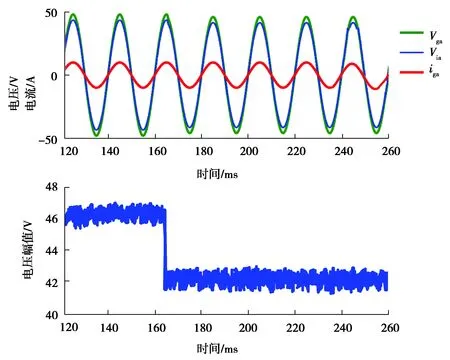
图11 t = 165 ms时,电网电压下降10% 的仿真的结果Fig. 11 Results of the simulation for a 10% drop in grid voltage at t = 165 ms
由仿真结果可知,在频率跳变和相位角跳变发生后,逆变器输出电压的相位就迅速发生变化,约90 ms后能跟踪电网电压相位,但相位差不能为零,这是因为电网阻抗ZG引起了相位延迟。当电网电压下降10% 后,由于虚拟电阻的响应非常迅速,电流能够得到很好的调节,所以会立即引起逆变器输出电压的幅值发生变化。这些结果表明控制系统具有一定的快速反应能力和高效性。
5.2 实验验证
在仿真的基础上搭建了逆变器并网系统,来验证所提出的方案。实验平台如图12所示,其中包括TDK-Lambda GEN 600-8.5直流电源,碳化硅三相逆变器,额定电流为50 A的1 mH接口电感,1210B -3型自耦变压器和横河DL850型隔离示波器。其中,电源、逆变器、电感器、自耦变压器、示波器以及笔记本电脑通过USB数据线与逆变器主控板连接,用作逆变器控制软件编译、下载和状态检测。5 V直流电源为逆变器的DSP主控板、门极驱动器电路、电流传感器和电压传感器供电。实验参数如表1所示,与仿真参数保持一致。
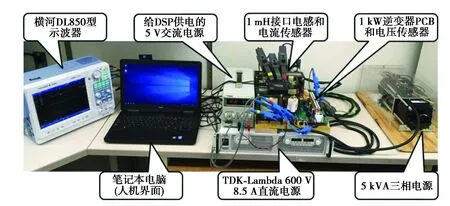
图12 虚拟电阻控制算法的实验台Fig. 12 Experimental bench for virtual resistance control algorithm
第一个实验是负载(d轴电流)的阶跃变化。将锁相环的PI控制器的系数修改为Kp,θ= 16和Ki,θ= 64,以降低锁相环的动态性能并使Tstl,θ= 500 ms。调节dq-电流控制,设置交流电流Tstl,c= 500 ms。仿真和实验结果如图13所示,其中id和iq的波形是通过将DSP内实验数据通入计算机内获得。
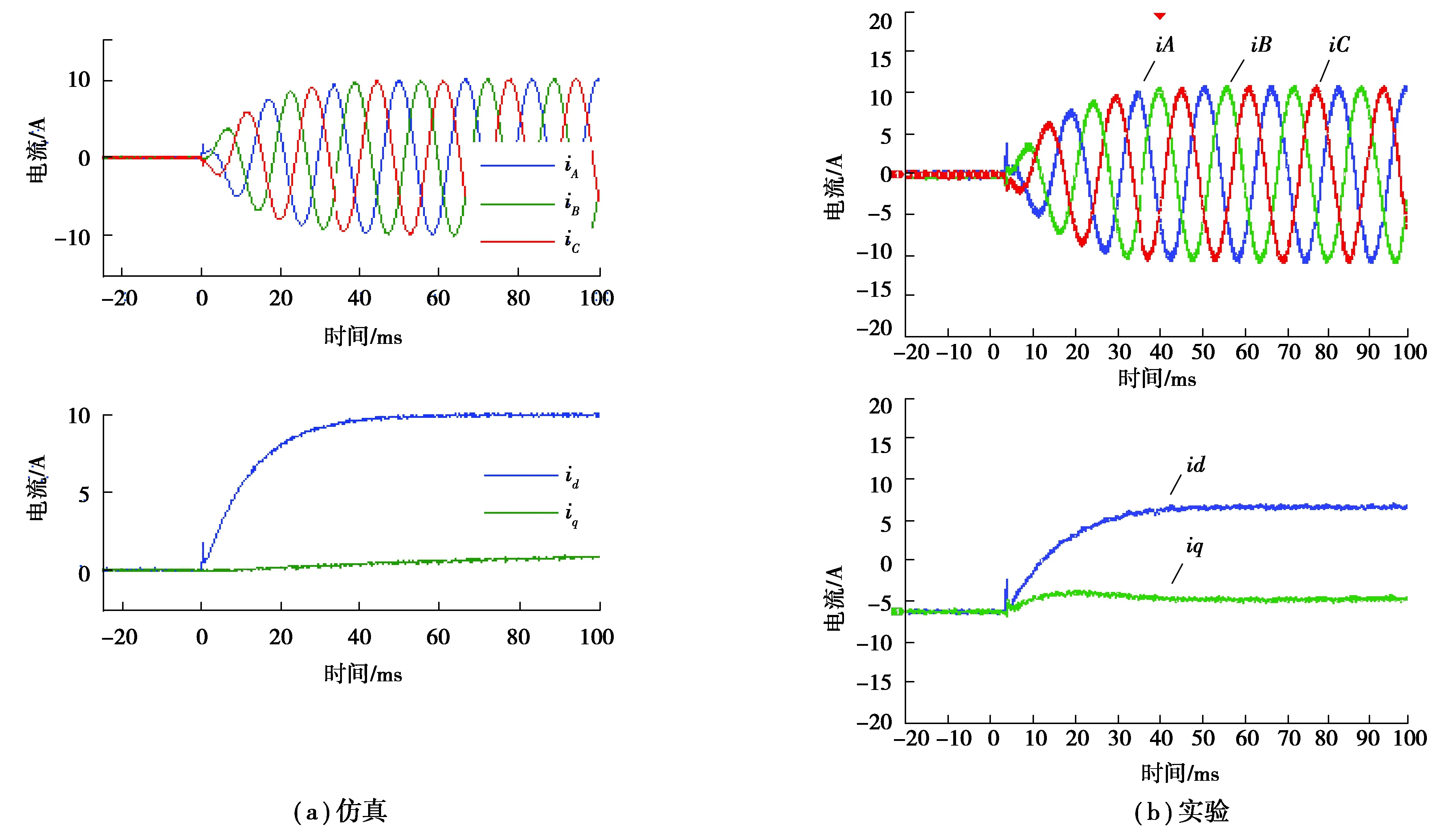
图13 负载电流阶跃变化的阻尼结果 Fig. 13 Damping results for step change of load current
从图13中可以发现,实验结果和仿真结果具有很好的一致性。实验电流的幅值存在一定的稳态误差,这主要是由电流传感器误差引起的。此外,在阶跃变化的瞬间,电流急剧上升,这是由于PID控制器的微分项所致。
在第一个实验参数的基础上,调节PID控制器积分参数和虚拟电阻值:Ki,c=100和RVI=0.1 Ω,以产生类似的电流沉降时间。检查负载电流的阶跃响应,仿真和实验结果对比如图14所示。
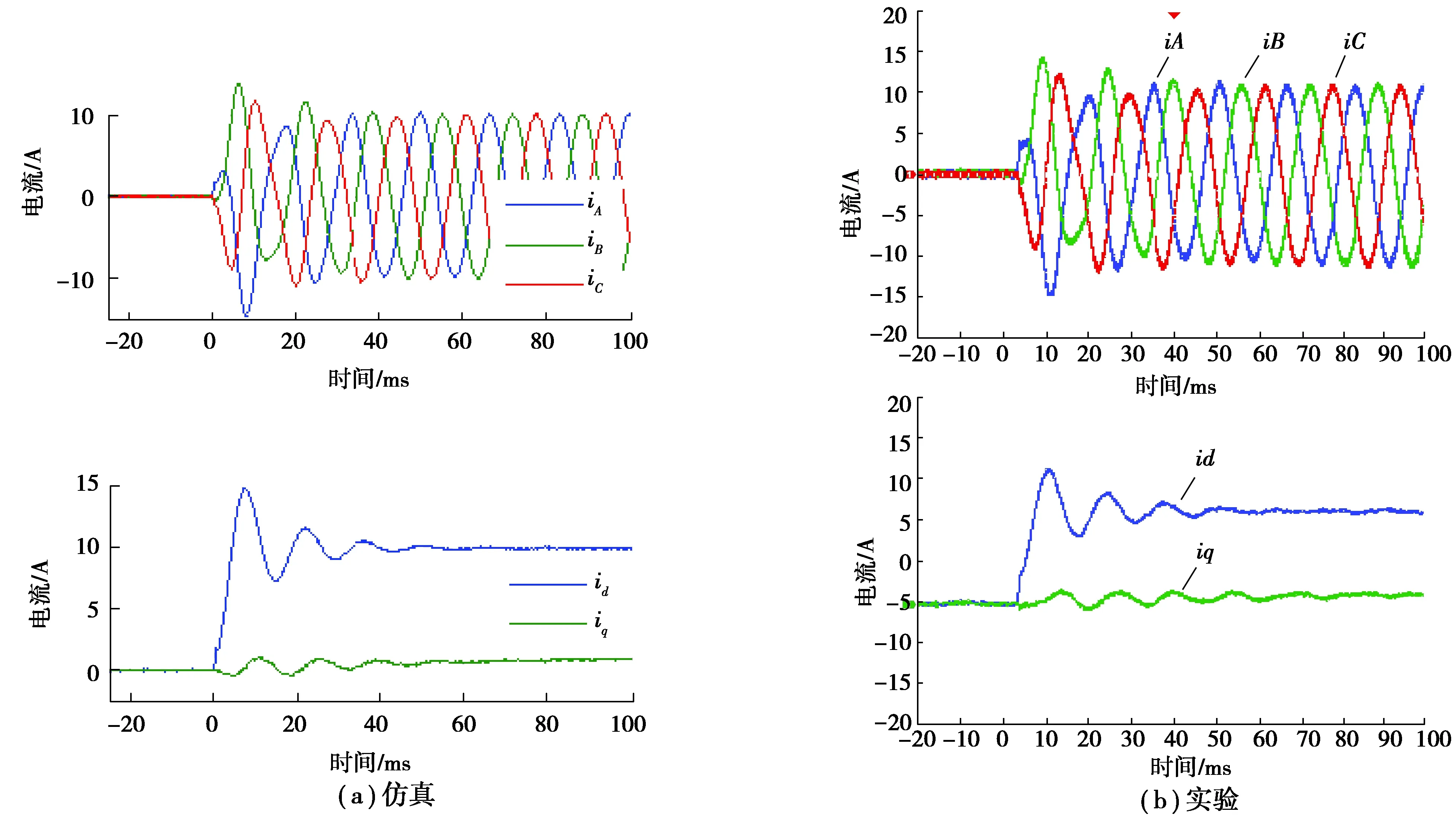
图14 负载电流阶跃变化不足的结果 Fig. 14 Results of insufficient step change in load current
从图14中可以发现,实验结果和仿真结果仍具有很好的一致性。但是从图13和图14也可以发现,q轴电流不为零,是伴随着d轴电流的产生而出现的,存在稳态误差。这种误差是由于存在电网电感,在电网电压和感测点电压之间产生了相位偏移而引起的。
6 结 论
文中提出了基于虚拟阻抗的无电压传感器控制方法,进行逆变器并网。在理论分析的基础上,通过虚拟阻抗来获得电网同步信号,省去接口阻抗和交流电压传感器,从而降低了系统的成本、功耗和复杂性。此外,通过构建启动电路,为逆变器提供启动电流,并使用虚拟电阻实现了虚拟阻抗压降的计算,简化了dq-电流控制的计算过程。Matlab/simulink仿真和实验结果证实了运用所提出的方法使系统对电网参数变化具有很好的跟随特性,并且与有接口阻抗的实际系统具有相同的控制效果,达到了设计目的。
猜你喜欢
振动与冲击(2022年10期)2022-05-30
电动工具(2020年4期)2020-08-20
计量学报(2020年7期)2020-08-07
计测技术(2020年6期)2020-06-09
液压与气动(2020年4期)2020-04-10
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2017年7期)2017-06-05
系统工程与电子技术(2016年7期)2016-08-21