双端事件触发机制下离散不确定Markov跳变系统动态输出反馈H∞控制
2022-12-12 12:13李艳辉张国旭
化工自动化及仪表 2022年6期
李艳辉 张国旭
(东北石油大学a.环渤海能源研究院;b.电气信息工程学院)
Markov跳变系统是一类特殊的随机系统,可以利用Markov链实现不同模态之间的转换[1]。 近年来,网络化Markov跳变系统的研究受到极大关注[2,3]。 在网络系统研究中,时间触发的数据传输方式容易造成数据拥堵、资源冗余等现象[4]。针对这类问题,采用事件触发机制,仅让满足事件触发条件的数据通过网络传输,有效缓解了网络数据传输压力,并取得了一些成果[5,6]。文献[5]提出一种事件触发的自适应差分调制方法。 PENG C和YANG T C提出一种事件触发通信机制和采样状态误差依赖模型[6]。值得注意的是,传统事件触发机制未考虑控制器到执行器的数据传输问题。因此,研究双端事件触发机制显得尤为重要。 在连续系统中,双端事件触发机制已有相关报道[7]。 然而双端事件触发机制下的离散系统控制问题同样具有学术研究价值。 另一方面,在网络化控制系统研究过程中,系统状态往往无法直接获得,这时采用输出反馈控制器可以保证系统的稳定,并且动态输出反馈控制器具有更好的性质和控制效果[8]。
笔者采用线性矩阵不等式和奇异值分解法针对不确定离散Markov跳变系统,在双端事件触发机制下研究了一类动态输出反馈H∞控制问题,并成功得到动态输出反馈控制器参数矩阵,保证了闭环控制系统双模态跳变情况下随机稳定且满足H∞性能指标。
1 问题描述
离散不确定Markov跳变模型为被控对象,有:
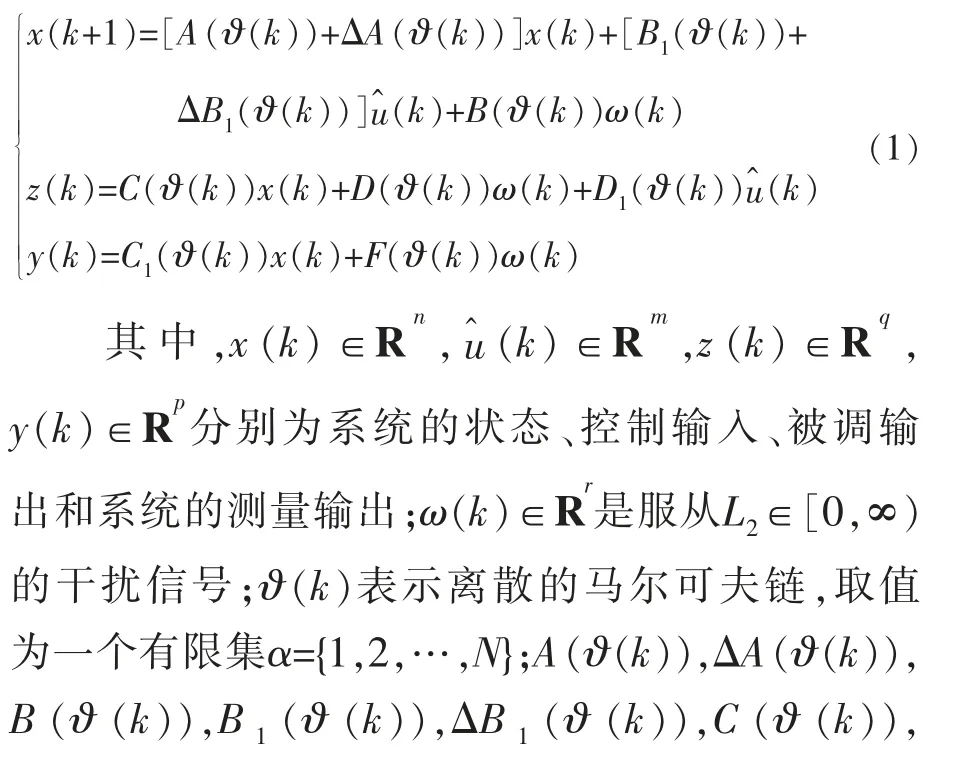

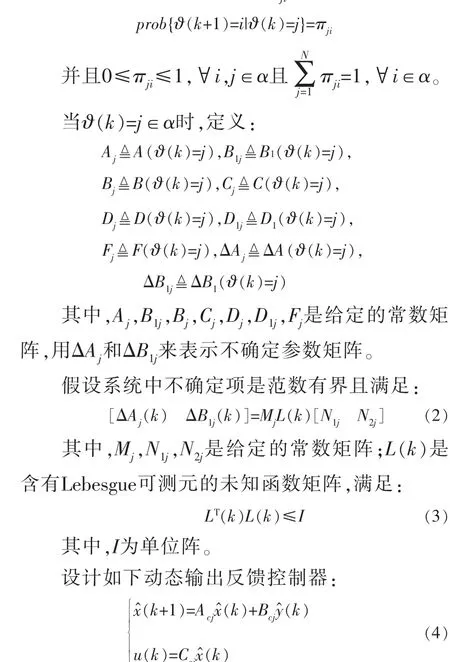
马尔可夫模态跳变概率πji为:
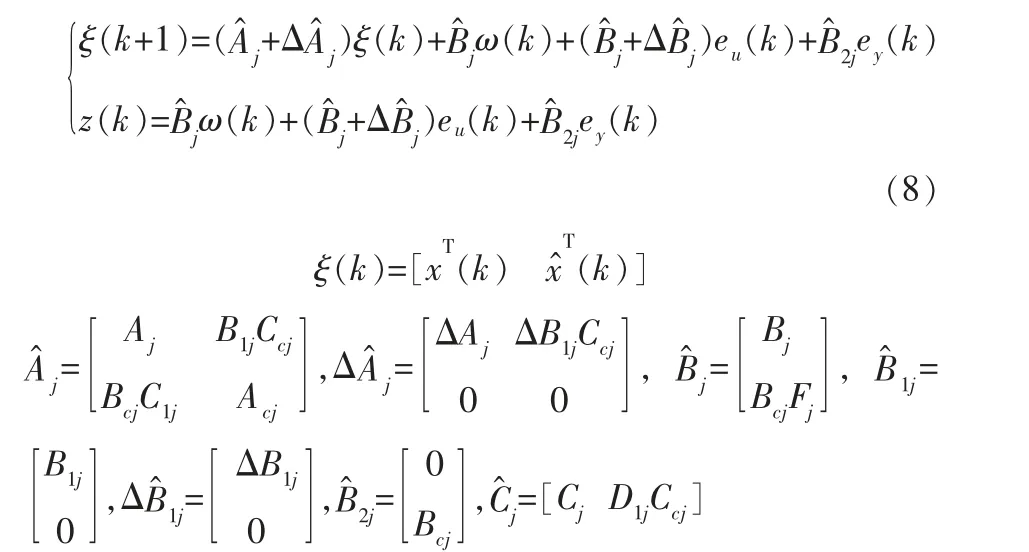
其中,x^(k)∈Rn为控制器状态向量;y^(k)∈Rp为控制器输入向量;u(k)为控制器输出向量;Acj,Bcj和Ccj是待求控制参数矩阵。
双端事件触发机制下网络化系统结构如图1所示。

图1 双端事件触发网络化控制系统结构
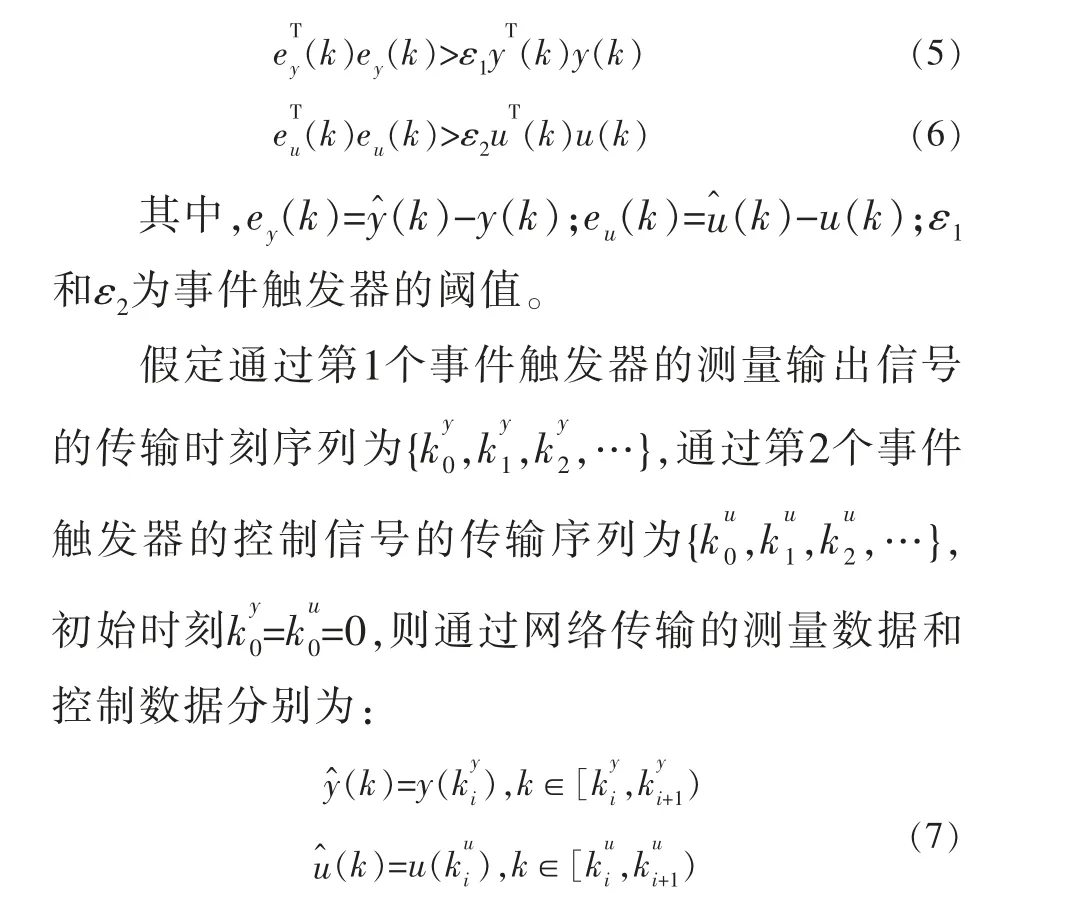
事件触发条件如下:
应用增广矩阵的思想,联立式(1)~(7)得到的闭环控制系统如下:
笔者的目标是设计出式(4)所示且满足下述条件的动态输出反馈控制器:
a. 当外部扰动信号ω(k)=0时,闭环控制系统(8)是随机稳定的;
b. 在零初始条件下,对于任意的非零干扰ω(k)∈L2[0,∞),闭环控制系统(8)满足H∞控制性能γ(γ>0),即E{‖z(k)‖2}<γ2‖ω(k)‖2。
引理1[9]假设D、S和F是具有适当维数的矩阵,F(k)满足FT(k)F(k)≤I,则对于任意参数β>0使得:

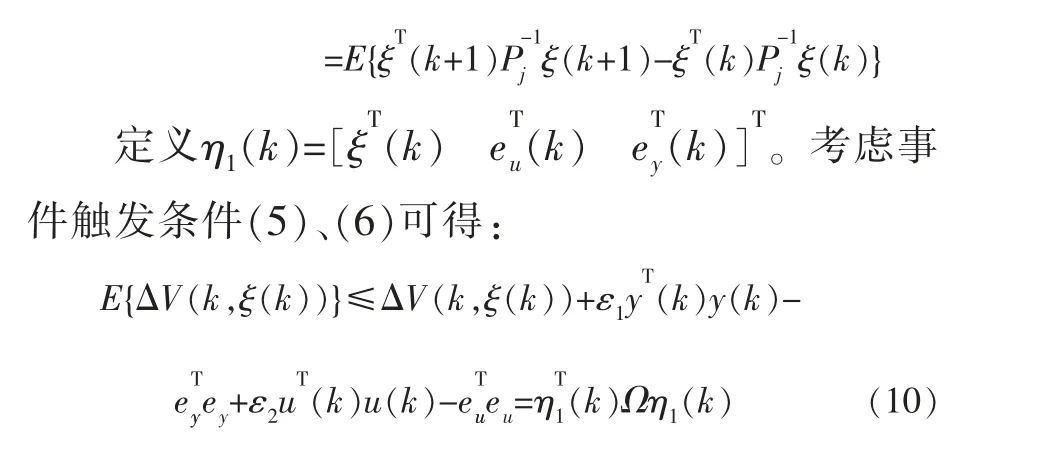
注1 双端事件触发机制用来减缓网络传输数据压力。 只有满足触发条件(5)、(6)的输出数据y(k)和控制信号u(k)才能进行网络传输。
注2 闭环控制系统(8)的建立考虑双端事件触发条件,使得系统控制状态随着事件触发机制的发生而变化,也是在减少网络资源占用的同时保证系统良好控制效果的关键。
2 闭环控制系统H∞性能分析
下面定理将给出闭环控制系统随机稳定且满足H∞性能指标的充分条件,为之后动态输出反馈控制器参数的求解提供基础。
定理1 给定事件触发阈值ε1、ε2和正标量γ,如果存在对称矩阵Pj>0和变量β满足下列不等式:


其中,ε1和ε2为事件触发阈值。

应用Schur补引理可得:
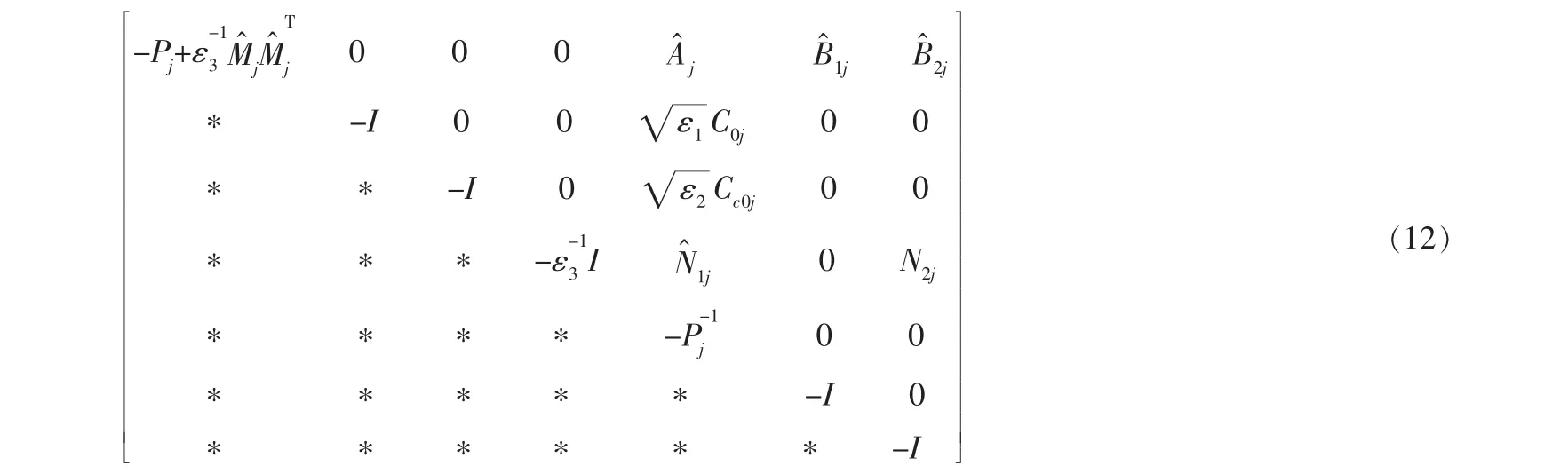
根据式(9)可得Ω<0,可知闭环控制系统(8)是随机稳定的。

由此可知,对于所有的η2(k)≠0,ω(k)=0,可得E{ΔV(k,ξ(k))}<0,进 而 可 得E{‖z(k)‖2}<γ2‖ω(k)‖2,则闭环控制系统满足H∞性能指标。
3 动态输出反馈H∞控制器设计
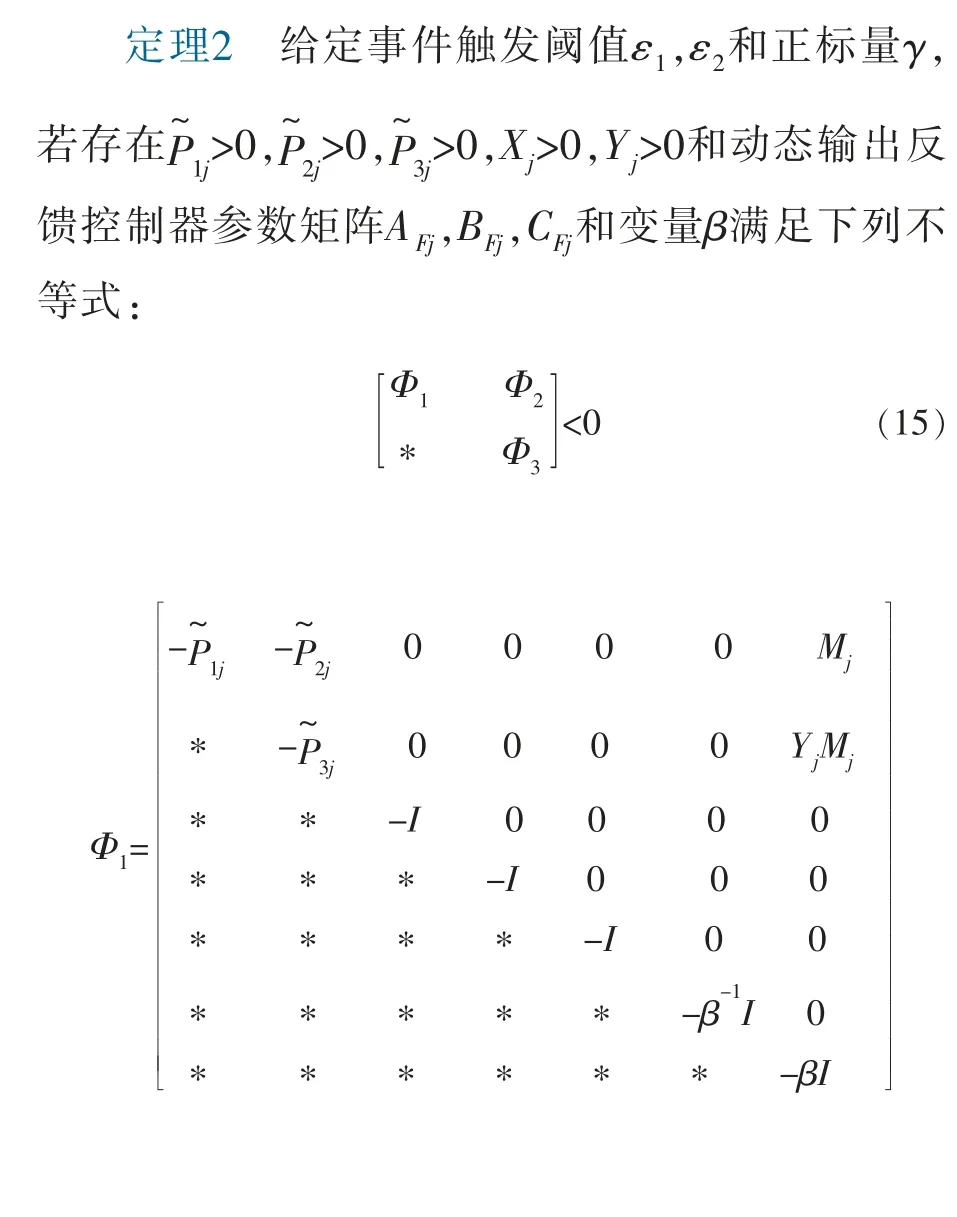

则称闭环控制系统(8)随机稳定且满足H∞性能指标γ。 动态输出反馈控制器参数为:
由式(18)可知Xj和Yj为非奇异矩阵,易得:

4 仿真算例
现将通过数值模拟来证明基于双端事件触发机制的动态输出反馈控制器的有效性。
取不确定相关参数L(k)=sin(0.1k),选取控制器初值x^(k)=[0.1 -0.01]T,扰动信号ω(k)=e-0.2ksin(0.3πk),事件触发阈值分别为ε1=0.3,ε2=0.5,初始状态x(k)=[0.1 0.01],得到最优解γ=1.2825,求得模态1情况下动态输出反馈控制器参

事件触发阈值ε1和ε2和H∞性能等级γ之间的关系见表1。 可以看出,事件触发阈值ε1一定时,H∞性能等级γ会随着事件触发阈值ε2的减小而减小, 同样当ε2一定时,γ也会随着事件触发阈值ε1的减小而减小,相应的H∞动态输出反馈控制效果越好,Markov模态跳变过程如图2所示。
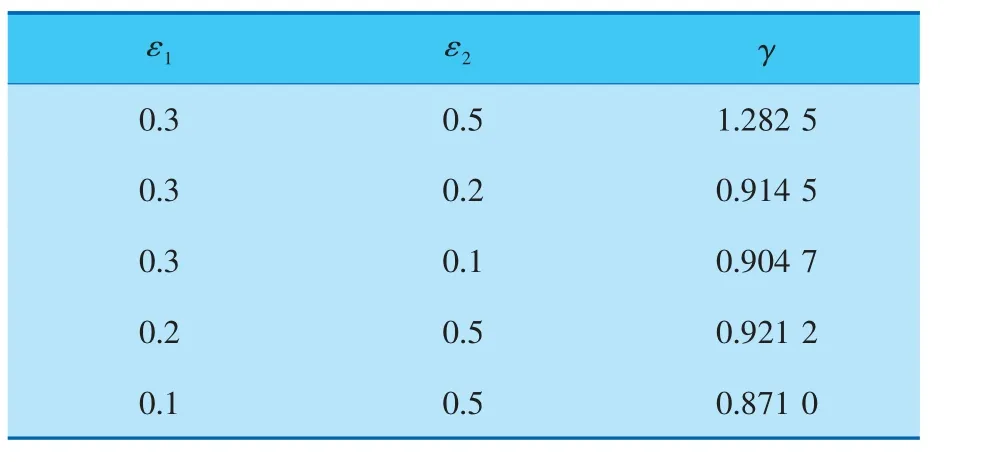
表1 事件触发阈值ε和性能指标γ之间的关系
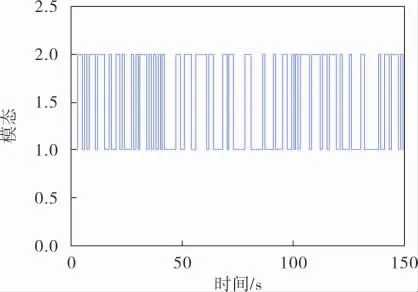
图2 模态跳变过程
开环控制系统状态曲线如图3所示,可以看出系统最终发散。 闭环控制系统状态曲线如图4所示。 图5是对应控制器的响应曲线,在控制器作用下系统状态最终稳定, 表明所设计的动态输出反馈H∞控制器有效。 双端事件触发机制作用时刻如图6、7所示,可知仅需80个测量数据和51个控制数据便可以保证对系统的稳定控制,对网络资源的占有率分别为53.3%、34.0%,相对于单端事件触发机制明显节省了网络资源。
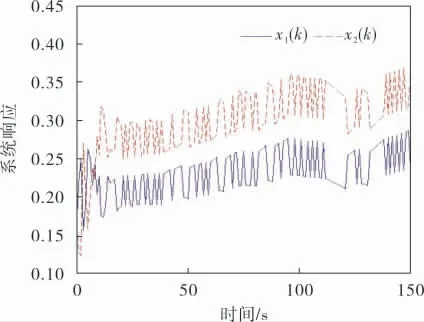
图3 开环控制系统响应曲线

图4 闭环控制系统响应曲线
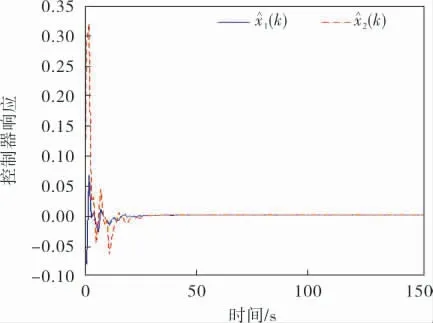
图5 控制器响应曲线
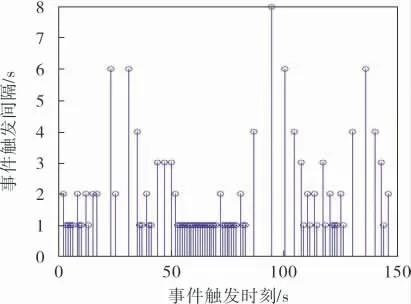
图6 测量数据传输时刻和传输间隔
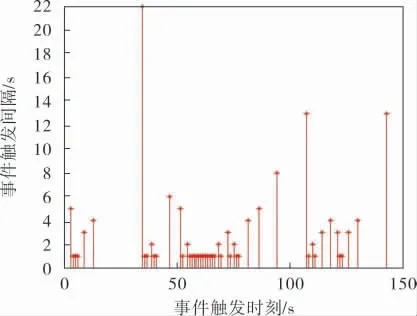
图7 控制数据传输时刻和传输间隔
5 结束语
针对离散不确定Markov跳变系统,在双端事件触发机制下给出了一种动态输出反馈H∞控制器设计方案。 采用奇异值分解法和线性不等式技术求取出动态输出反馈控制器参数,在系统具有双模态跳变情况下,利用双端事件触发机制对传输数据进行筛选,进一步节约网络资源。 提出的H∞控制方法为飞行器控制和化工生产过程等领域的应用提供理论参考。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
湖北电力(2020年3期)2020-11-02
制造技术与机床(2019年9期)2019-09-10
成都信息工程大学学报(2019年5期)2019-05-21
西南交通大学学报(2018年6期)2018-12-18
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
电子制作(2018年11期)2018-08-04
山东工业技术(2016年15期)2016-12-01
电脑知识与技术(2016年18期)2016-11-02