一种仿生机械手肌电控制系统的设计与实现
2022-12-11 09:43崔雪渭彭熙颜顺陈含丽子杜笛箫杨琬晨
智能计算机与应用 2022年11期
崔雪渭,彭熙,2,3,颜顺,陈含丽子,杜笛箫,杨琬晨
(1 华中师范大学 计算机学院,武汉 430079;2 湖北省高等学校计算机基础实验教学示范中心,武汉 430079;3 湖北省人工智能与智慧学习重点实验室,武汉 430079)
0 引言
随着控制技术、信息技术等现代科技的飞速发展,拥有与人手相似结构的仿生机械手已具备很强的灵活性,因而可代替人手完成复杂操作,成为医疗保健、资源勘探、灾难救援等诸多领域的实用工具[1]。表面肌电信号(Surface Electromyography,SEMG)是肌肉收缩时伴随的电信号,是在体表无创检测肌肉活动的高效方法,在人机交互控制、手势识别等领域发挥着重要作用[2]。
在仿生机械手结构设计方面,Xu 等人[3]提出了一种与人手高度相似的仿生机械手结构。在肌电信号方面,程扬威[4]对基于多通道表面肌电特征图像的手势识别进行了深入研究,通过提取不同表征的肌电特征及深度学习,实现了对不同手势的精准识别。吴娜[5]也提出了一种基于一维卷积神经网络-独立循环神经网络(Conv1D-IndRNN)模型的手势识别算法,提升了通过表面肌电信号进行手势识别的准确率。但是对于如何将肌电信号处理与仿生机械手控制相结合,构成面向仿生机械手的肌电控制系统,却少见成熟可行的设计。
本文提出了一种面向仿生机械手的肌电控制系统的设计与实现,即仿生机械手能够实时模拟手部动作,可用于灾难救援、医疗恢复,也可用于排爆等高危环境中。
1 仿生机械手肌电控制系统的整体设计及分析
本文所设计的仿生机械手肌电控制系统大致可以分为3 个部分:肌电信号的采集、肌电信号的处理和动作匹配。首先,利用六导联肌肉电传感器搭配Arduino UNO 采集肌电信号;然后,树莓派接收Arduino UNO 传送的数据,进行数据处理和加工;最后由树莓派做出判断,向仿生机械手发出运动指令,使其执行相应的动作。各组成部分的结构框架如图1 所示。

图1 仿生机械手肌电控制系统的结构框架Fig.1 Structural framework of myoelectric control system of bionic manipulator
本文选用的肌电传感器为六导联肌肉电传感器,能够采集人体手臂或者腿部的表面肌电信号,并对其进行一系列的放大与滤波处理。还有2 种通道增益方式,也可结合Arduino UNO 输出原始肌电信号或者包络后的肌电信号。
树莓派是一款基于ARM 的微型电脑主板,以SD/MicroSD 卡为内存硬盘,不仅具备所有PC 的基本功能,还有着丰富的硬件接口。本文使用的树莓派四代B型,具有40 个引脚接口,不仅可以读取肌电传感器采集的肌电信号并进行处理匹配,还可以与仿生机械手进行串口通信,以控制仿生机械手做出与肌电信号相对应的动作。
本文选用了树莓派和并行舵机控制板协同工作的方式,根据通信原理及舵机控制指令对树莓派控制系统进行设计。即树莓派在对肌电信号加以处理后,将进行仿生机械手的动作匹配,再向并行舵机控制板发出相应命令,从而控制仿生机械手对动作进行实时模拟。
2 肌电信号的采集与处理
2.1 肌电信号
肌电信号,是人体运动时肌肉产生的生物电信号,能够反映肌肉动作的状态。当人的肌肉在运动时,相应的肌肉群会发生收缩。比如,当人的右手运动时,会受到大脑中枢神经系统的控制,右手骨骼肌的肌肉将会收缩以完成相应动作,此时就会在皮肤表面产生生物电信号。
肌电信号具有微弱性、低频性、易受干扰性等特点[6],其幅值主要在100~5 000 μV,频率范围在0~1 000 Hz,信号中的主要能量和频谱主要集中在10~500 Hz。同时,采集肌电信号时易受电极位置、皮肤状态、场所噪音等影响。
2.2 肌电信号的采集
目前,肌电信号的采集方式主要有2 种:侵入式采集与非侵入式采集。两者的区别在于采集的位置和方式不同。其中,侵入式采集需要把针极刺入被试者的肌肉组织内部,这样一来信号采集的过程就不受外界干扰,但在一定程度上会对被试者造成伤害;非侵入式采集需要把电极贴片与被试者的皮肤表面接触,通过此种方式采集到的信号就是表面肌电信号。
本文选用六导联肌肉电传感器进行肌电信号的非侵入式采集。其前端采集电路通过1~6 通道采集人体手臂或者腿部的肌电信号,并对SEMG 进行一系列的放大与滤波;中端通过单刀双掷开关切换Envelope Mode 和RAW Mode 输出信号;后端采用Arduino UNO 采集中端的输出信号,并控制LED灯发光,可以通过其亮度快速得出SEMG 信号的强度。
肢体所完成的动作是依靠若干肌肉相互协调所致,并非其中一块肌肉单独引起的。人体手臂的肌肉分布如图2 所示。

图2 人体手臂肌肉分布示意图Fig.2 Schematic diagram of human arm muscles
经过反复的实验测试,发现指部的伸屈与肱桡肌、指浅屈肌、指深屈肌、尺侧腕屈肌和桡侧腕屈肌的关系更加紧密。故将肌电传感器的一次性贴片电极贴在上述肌肉组织上进行采集。该电极贴片与肌肉接触面积小,从而能够减少周边肌肉对选定肌肉的信号干扰。根据前人的医学研究发现,在被试者手臂上放置4~5 个电极片,可使动作识别率最大化。
2.3 肌电信号的处理
在多通道肌电信号的数据处理中,活动段检测是极其重要的一个部分,可以确定很多组手势中每一个手势动作的起始时刻和终止时刻,对每一个手势动作进行划分。信号的活动段检测能够对连续多个手势动作进行准确判别,直接影响着后期的特征提取和模式分类。本文使用移动平均法进行活动段检测。移动平均法是短时能量检测算法中一种典型方法,能够从连续的肌电信号中有效区分出活动段和静息段,方便不同手势动作的识别。
3 动作匹配算法
3.1 卷积神经网络
在初步采集中,共收集了3 个动作的39 445 条肌电信号数据。由于采集时肌电传感器使用了2 个通道,因此数据集的总维度是39 445×2,对应39 445个标签。此后,根据标签将数据转换为3 个部分,并在每个部分中进行分组操作,每200 个合并为一组,因此每一组的维度为200×2×1,作为卷积神经网络的输入。在训练过程中将数据集打乱,同时对标签数据进行one-hot 操作,并取80%作为训练集,20%作为测试集。在构建神经网络模型时使用了Python的Keras 模块,该卷积神经网络共有5 层、即3 层卷积层和2 层全连接层,如图3 所示。

图3 卷积神经网络模型图Fig.3 Convolution neural network model
每一层经过卷积操作后得到的特征图大小的计算公式如下:

特征图的数目由卷积核个数决定,因此每一次卷积操作之后得到的特征图大小为(高度,宽度,卷积核个数)。
本文中,选择了基于梯度优化算法的Adam 优化器,损失函数则选择了多分类研究任务中常用的categorical_crossentropy。训练过程共迭代100次,每次训练的数据样本量为64。训练后的损失值如图4 所示。

图4 训练集和测试集损失值Fig.4 Loss value of training set and test set
3.2 KNN 分类算法
考虑到树莓派达不到正常PC 机的算力,为了能够在用树莓派运行时取得实时的效果,本文采用了KNN 分类算法,KNN 算法作为最经典的机器学习算法之一,实现起来也十分简单。KNN 算法的核心思想为:如果2 个样本足够相似,即在特征空间中的距离足够近,则这2 个样本大概率属于同一类别。为了提高判断的准确率,在实际应用中通常寻找离待测样本最近的K个样本,根据K个样本的类别来判断待测样本的类别。在不考虑距离权重时,K个样本中哪种类别的样本数量最多,则待测样本同属于此类别。本文使用了Sklearn库中的KNeighborsClassifier 来实现KNN 算法。
首先是采集数据,将采集到的握拳、张开以及Yeah 手势的数据集分别设置标签,依据标签分成三大组。而后将一个标签中的数据视为KNN 中的一个点,将数据集中80%的数据设置为训练集,将数据集中20%的数据设置为测试集。
之后将数据进行存储后便可以进行K个预测投票,再利用测试集中的数据进行测试,发现精度达到96%,属于简单的学习任务,适用于KNN 算法。
用新数据预测时,可按行读取输入的数据,并按行投票判断归属于哪一类,最终将每一行的结果再依据类别进行累计,输出累计数目最多的结果。
4 机械手结构设计
4.1 整体设计
本机械手具有高度的仿生性能,根据人手手指关节的结构和运动自由度进行设计,采用了连杆结构,使得一个伺服舵机能够控制一个手指上3 个关节的运动,即伺服舵机通过主舵转动推动连杆使得一个手指向前弯曲,主舵反方向转动拉动连杆使得手指伸张,如图5 所示。这样的结构能够使仿生机械手比较轻巧灵活地实现人手的动作。

图5 机械手连杆结构Fig.5 Connecting rod structure of the manipulator
4.2 伺服舵机
仿生机械手使用的舵机是LX-224 双轴总线舵机,如图6 所示。LX-224 双轴总线舵机扭矩为20 kg,自由度为180°,能够充分满足手指关节的运动需求。

图6 LX-224 舵机Fig.6 LX-224 steering gear
该舵机为并行舵机,在舵机控制系统中,本文研制并开发了一款具有多并行舵机控制功能的舵机控制板。舵机控制板大多以单片机(STM32/STM8等)作为核心,本文的并行舵机控制板以单片机STM8S003 为主板。STM8S003 提供了10 比特模数转换器、3 个定时器、1 个串口、1 个IIC 等功能模块。同时并行舵机控制板内还集成了2 块PCA9685 作为驱动模块。驱动模块PCA9685 是一款IIC 总线控制的16 通道的PWM 波发生器,每个输出通道都有自己的12 位分辨率固定和频率单独的PWM 控制器,该控制器在典型的24~1 526 Hz 的可编程频率下运行,占空比在0%~100%范围内可调。PCA9685 还具有一个外部时钟输入引脚,可以接受用户提供的时钟(最大50 MHz),代替内部25 MHz振荡器,此功能允许同步多个设备。仅占用主控板的4 个引脚,通过IIC 通信协议就可以驱动16 台舵机。此外,可以通过级联的方式最多级联62 个驱动板。本机械手所使用的并行舵机控制板共级联了2个驱动板,可以驱动32 台舵机。
并行舵机控制板如图7 所示,控制板电路图如图8 所示。

图7 并行舵机控制板Fig.7 Parallel steering gear control board
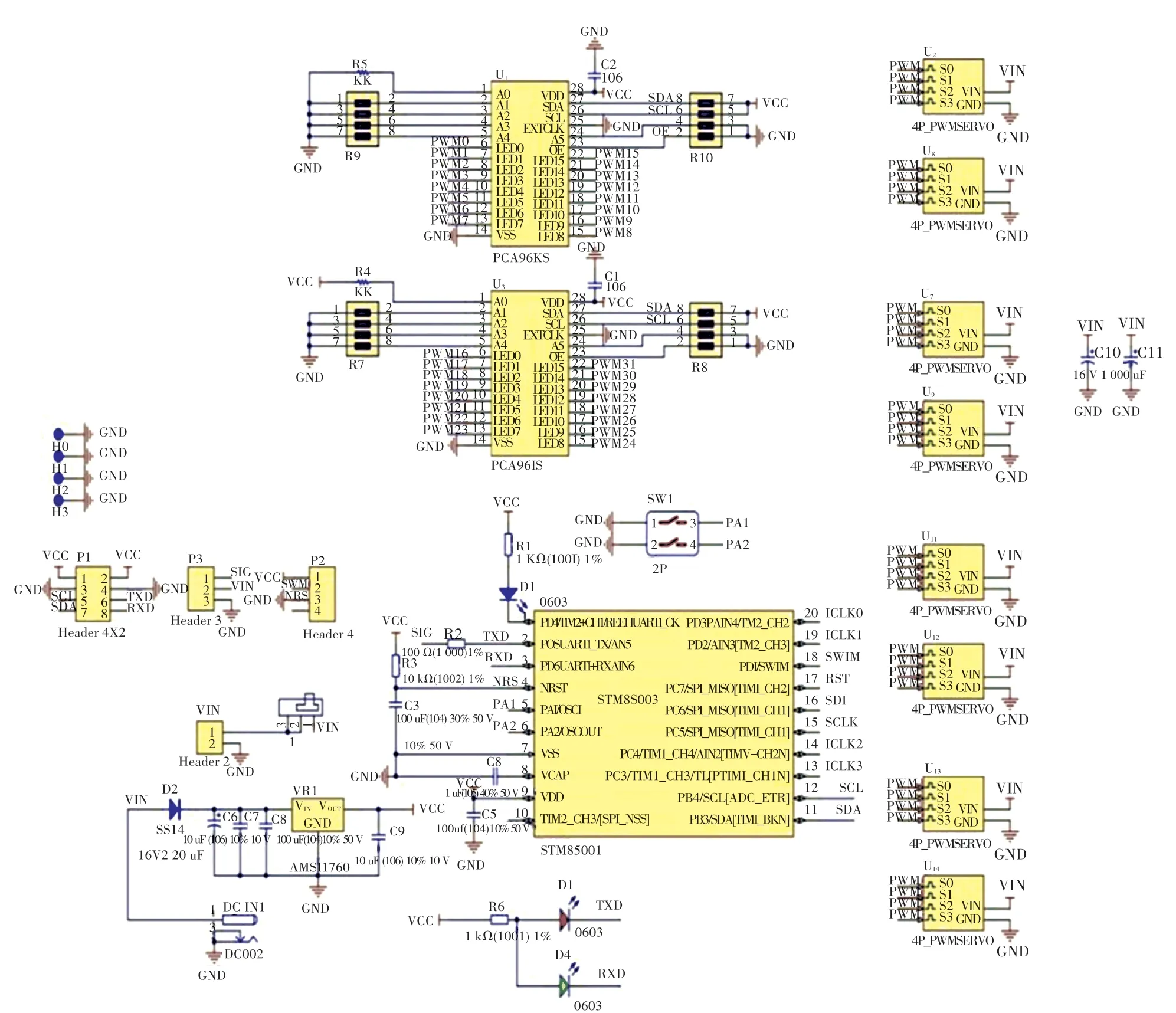
图8 舵机控制板电路图Fig.8 Circuit diagram of steering gear control board
5 系统硬件设计
本文所涉及的系统主要由树莓派4B、并行舵机控制板、并行舵机、肌电传感器、Arduino 等部分组成。控制系统各模块硬件连接如图9 所示。

图9 控制系统各模块硬件连接图Fig.9 Hardware connection diagram of each module of control system
5.1 硬件的配置
为了满足本文硬件需要,树莓派需要设置开机自启动项,同时通过配置文件来修改树莓派的设备树,改变引脚的映射关系,将ttyAMA0 映射到引出的GPIO Tx /Rx上,以此使用高性能的硬件串口。Arduino 需要使用A0~A5和D0~D13的引脚完成与肌电传感器的数据传输、控制LED 灯等功能。此外,还要使用USB 线将Arduino 与树莓派进行连接。
5.2 硬件通信模式设计
5.2.1 Arduino 与肌电传感器之间的通信
Arduino 与肌电传感器之间通过Arduino的D0和D1引脚来实现串口通信;通过D2~D4引脚分别实现移位寄存器的数据、时钟和锁存功能;通过D5和D6引脚来控制灯的按键;通过D7~D12引脚输出的数据来控制传感器上灯的颜色;通过D13引脚来使能控制灯的模块;通过A0~A5引脚来接收肌电传感器的包络信号。最终能够通过Arduino 读取肌电传感器的肌肉电信号数据。
5.2.2 树莓派与Arduino 之间的通信
树莓派与Arduino 之间通过USB 口进行连接,使用串口通信方式。连接后检查是否存在ttyACM0文件,存在即可正常使用。由于串口通信简单、并且能够实现远距离通信,符合项目要求,所以树莓派和Arduino 之间使用串口通信。串口通信主要就在于各类参数的匹配,例如波特率、数据位、奇偶校验。2个端口如要实现通信,这些参数必须匹配。
5.2.3 树莓派与舵机控制板之间的通信
本文选用了树莓派和并行舵机控制板协同工作的方式来控制机械手。并行传输相比于串行传输的优点在于易于实现和速度较快,虽然传输距离近,但对本系统来说已经足够,所以选择并行传输方式,并使用上述自主研制的并行舵机控制板。具体实现方式为:控制板的Tx 接树莓派的Rx,控制板的Rx 接树莓派的Tx。本次设计中,图9 中树莓派的8 号引脚(TXD)、10 号引脚(RXD)分别与并行舵机控制板的Rx、Tx 引脚相连。最后设置相同的波特率,即可将树莓派上的指令传输给舵机控制板,从而实现对舵机的控制。
6 测试及结论
本文针对仿生机械手肌电控制系统进行了测试与评估。5 名被试者首先进行表面皮肤处理,然后使用自主设计的上位机软件采集当前动作的肌电信号,如图10 所示。

图10 数据可视化及动作预测Fig.10 Data visualization and action prediction
测试中,握拳、五指张开和Yeah 手势每个动作各做20次,即每个动作都有100 组数据,分别统计每个动作正确识别的个数、错误识别的个数以及识别率见表1。

表1 测试实验结果统计Tab.1 Statistics of test results
从表1 可以看出,在进行测试的动作中,握拳的识别率最高,达93%,而张开和Yeah 手势识别率略低。考虑到被试者之间体质差异的问题,这样的误差可以理解。另外,实验过程中还发现,张开和Yeah 手势之间容易发生错误识别,经分析发现是由于两者肌电信号有时近似度较高。
另一个评估标准是系统的响应时间。实验中,发现仿生机械手反应相对迅速。为了实现定量分析,对每个动作从开始预测到输出结果的时间进行了统计。结果表明,系统的平均识别时间为12 s。而本系统每20 ms 采集一条肌电数据,即采集当前动作的400 条肌电数据需要8s,所以预测速度平均为4 s。进一步分析后可知,通过提高采集速度和优化匹配模型,能够更好、更快地得出结果。
综上所述,本文的仿生机械手肌电控制系统是合理的。
7 结束语
本文设计了一种基于肌电控制技术的仿生机械手肌电操控系统,由六导联肌肉电传感器、肌电信号传输导联线、Arduino UNO 单片机、上位机、树莓派4B、并行舵机控制板及仿生机械手构成,基本实现了对人手的实时模仿。后续可通过ZigBee 实现远程控制,进而用于排爆等高危行业和偏瘫患者的手部功能恢复等领域。目前由于只采集了3 个动作的肌电数据做测试,存在一定的局限性。但总体上对仿生机械手的后续发展与应用具有一定的借鉴意义。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
电子制作(2019年11期)2019-07-04
电子制作(2019年23期)2019-02-23
电子制作(2017年17期)2017-12-18
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
现代电生理学杂志(2016年4期)2016-07-10
中国酿造(2016年12期)2016-03-01
火控雷达技术(2016年2期)2016-02-06