
非接触供电与锂电池混合动力有轨电车的EMR(能量宏观表示法)模型与仿真*
2022-12-10 06:34付稳超
城市轨道交通研究 2022年12期
付稳超 季 巧
(1.中车唐山机车车辆有限公司,063099,唐山;2.北京交通大学国家能源主动配电网技术研发中心,100044,北京∥第一作者,正高级工程师)
传统的接触网供电方式易发生断线、刮弓、雷击断电等,不仅会影响列车运行安全,还可能造成通信干扰、影响城市景观等问题[1]。采用非接触式供电技术时,供电电源不与列车直接接触,避免了断线、电火花、线路磨损等问题;其能量传输装置安放在列车两侧或底部,不会影响乘客欣赏沿线景观,减少了意外触碰的情况,更安全,且有利于快速疏散[2]。非接触式供电技术为城市轨道交通车辆的发展提供了新方法、新思路[3-4]。
图1为非接触供电系统构成的简要示意图。非接触供电系统的基本工作原理如下:首先,通过电源产生直流电;然后,经过高频逆变电路将直流电逆变成高频交流电,并注入到初级线圈;随后,高频交流电在初级线圈与次级线圈中由电磁感应而生成高频交流感应电动势;最后,通过谐波整流模块整流后,生成适用于负载的直流电[5-7]。

图1 非接触供电系统构成简要示意图
当采用非接触供电系统作为单一动力源给有轨电车供电时,可能存在起动响应慢、不能功率跟随、某些区段无法铺设非接触供电线路等问题[8]。而若采用非接触供电和锂电池组成的混合能源系统,则列车可以在起动时依靠锂电池提供动力,不仅起动响应快,还能在制动时吸收再生能量,在无网区域由锂电池供电。然而,多能源的耦合使得列车系统更加复杂,如何构建整车级的全系统仿真模型,从而为列车设计人员提供快速的验证模拟工具是面临的重要问题。对此,本文提出了基于EMR(能量宏观表示法)的非接触供电列车模型,并通过实际数据验证了模型的有效性和精度。
非接触供电与锂电池混合动力有轨电车(以下简为“混合动力有轨电车”)的动力系统结构图如图2所示。
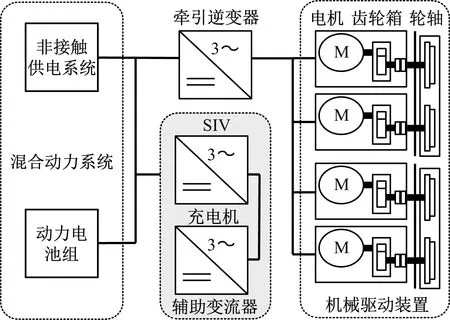
图2 混合动力有轨电车的动力系统结构示意图
1 建立EMR模型的思路
EMR是一种图形化的建模工具,其基于系统内部元件间能量的作用与反作用原理,用图形的方式来表达能量的传输与转换[9-11],主要应用于电动汽车、有轨电车等领域中复杂机电耦合系统的建模仿真,可再现其中能量的分布和流动。
1.1 EMR建模的基本元素
EMR强调突出能量流动属性,用元素之间的作用变量和反应变量的乘积来反映瞬时功率变换,具体形象地表示出实际物理系统中元件的相互作用,例如因果关系(如积分、比例)、能量转化关系等[5]。EMR模型的正向通路包括能量源模块、能量转换模块、能量积累模块和能量耦合模块,与电容、电感、电机等物理元件相对应(见表1),故物理元件的数学模型是EMR建模的理论基础。
表1中,能源模块为产生或消耗能量的模块(如锂电池等动力电池),其向外界输出电压,并接受外界反作用于它的电流。能量积累模块为对外界的动作变量具有“积分”性质的模块(如电感),可接受外界反作用于它的电压,同时利用积分获取对外界的动作变量电流。能量转换模块为表示物理量转换的模块(如齿轮箱),利用传动比进行两端的转矩及转速转换。能量耦合模块为表示多能源耦合的模块(如混合动力系统的并联部分),以基尔霍夫定理为依据实现建模。
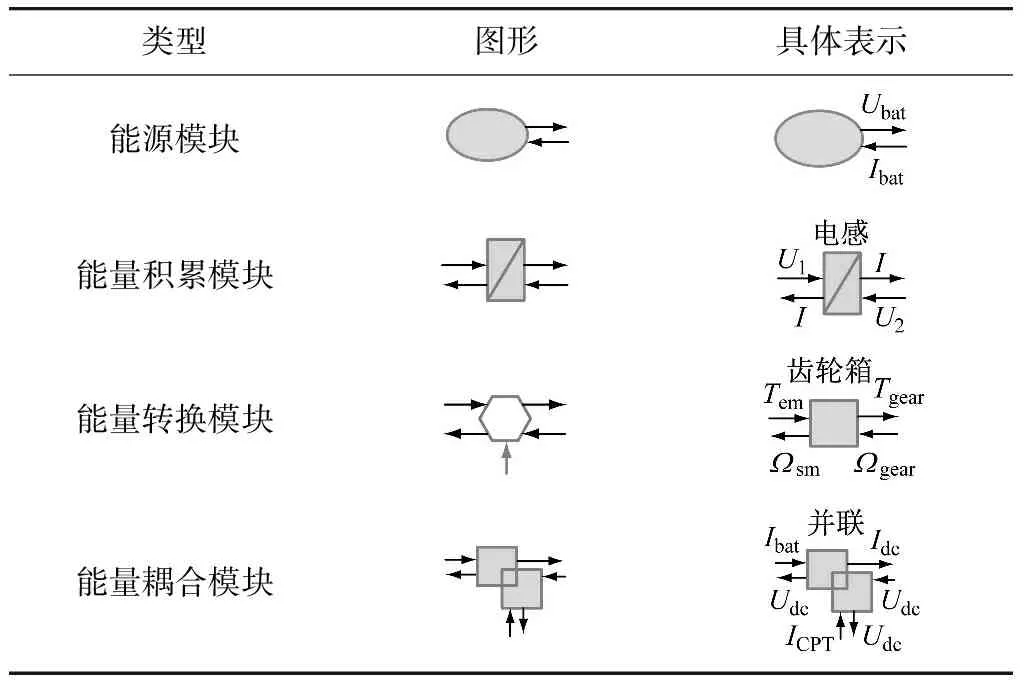
表1 动力系统的EMR模块分类
1.2 EMR建模的控制系统模块
基于某系统正向通路的图形化模型,通过对每个模块进行反转就能得到该系统的控制通路。表2为基于反转规则的动力系统控制模块分类。
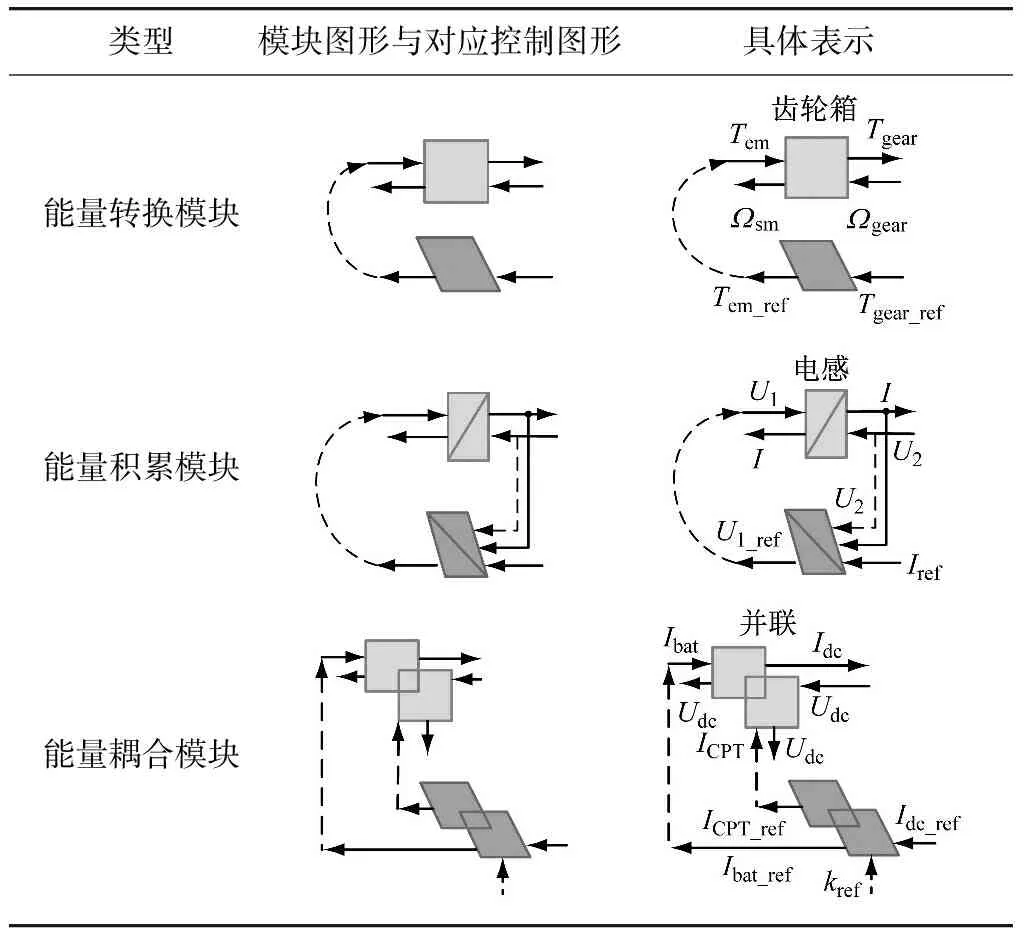
表2 基于反转规则的动力系统控制模块分类
1.2.1 能量转换模块的反转
对于简单的比例关系不用测量数据,也不用设计控制器,直接对其反转即可:
(1)
式中:
y(t)——模块的输入;
u(t)——模块的输出;
k——转换模块的比例系数;
yref(t)——模块输出的指令值;
uref(t)——模块输入的指令值。
1.2.2 能量积累模块的反转
能量积累元件因其对时间有依赖性,故不能直接反转有物理因果关系的模块,而是需要加入如比例积分控制器等,并根据实际情况对动力系统进行闭环控制。故有:

Kp[yref(t)-ymes(t)]
(2)
式中:
Kp——比例积分控制器;
ymes(t)——模块实际测量的输出值。
1.2.3 能量耦合模块的反转
在多种能源耦合的动力系统中,可以认为该系统的某个输出是由某个输入对应得到,将其他输入量看作是可测量或可评估的干扰信号。即:
y(t)=u1(t)+u2(t)→u1ref(t)=
yref(t)-u2mes(t)
(3)
式中:
u1(t)、u2(t)——分别表示耦合模块的两个输入;
u1ref(t)——耦合模块输入的指令值;
u2mes(t)——耦合模块输入的实际值。
能量输入到输出的路径即为动力系统的调节路径,可以实现有能量流动的所有子系统间的有效联系,再按照上述原则对模型中的每个元素依次反转并链接起来,得到整个复杂系统的控制通路。
2 混合动力有轨电车的EMR模型
本文重点研究非接触式供电系统与锂电池的配置和能量管理问题,故将非接触式系统内部结构简化,只保留输入输出的效率模型。
锂电池采用简单的一阶单体动力电池Thevenin模型来模拟[12-13]。该模型能准确地反映锂电池在实际使用过程中的稳态特性及动态特性,且模型所需的电池相关参数较少,便于仿真计算[14]。
基于EMR概念,建立混合动力有轨电车动力系统仿真计算模型,如图3所示。混合动力有轨电车系统级仿真计算模型主要包括正向通路中的能量源模块、能量耦合模块、能量转换模块,以及基于正向通路的反转控制。
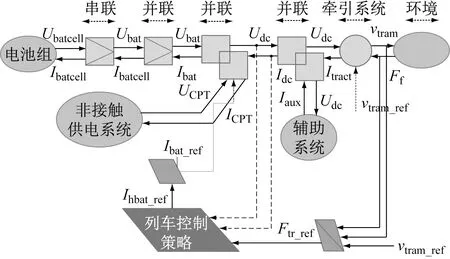
注:Ubatcell和Ibatcell分别表示单体电池的电压和电流;UCPT和ICPT分别非接触供电的电压和电流;Iaux和Itract分别表示辅助系统和牵引系统的电流;Ftr_ref、Ff、vtram及vtram_ref分别表示牵引力的指令值、列车阻力、列车速度及列车速度指令值。
系统能量源能够提供或消耗能量,其包括为整车提供电能的锂电池与非接触供电系统、包含空调与照明等耗电设备的辅助供电系统、通过摩擦将轮轨的机械能转换成内能吸收的外界环境三部分,用椭圆形表示。在进行EMR建模时,可认为非接触供电系统与锂电池对外提供的作用变量为电压,同时接受外界对其提供的反应变量(即电流)。可将辅助系统看作功率为Paux的电流源,其消耗能量。外界对辅助系统的作用量为电压,而辅助系统对外界的反作用量为电流。
利用能量耦合模块将辅助系统并联到直流母线上,则锂电池、非接触供电系统、辅助系统和中间直流母线的电压相等,纯电池有轨电车直流母线上的总电流为锂电池与非接触供电系统的电流之和,也等于列车牵引系统与辅助系统的电流之和。
能量转换模块(圆形)反映列车牵引传动系统的能源转换,可按纯电池有轨电车受到的总牵引力与总阻力之和来计算有轨电车的速度vtram。对于外界环境,利用能量源模块,基于有轨电车牵引计算规程,将vtram换算为列车受到的阻力Ff。
混合动力有轨电车EMR模型的反转控制主要是针对有轨电车牵引系统和混合动力能量耦合模块。列车牵引系统的控制目标是实现列车运行速度指令,基于“原因-结果”的相互关系,对于列车惯性特性的反演。列车速度闭环控制器通过列车实际运行速度的测量值及指令值,利用列车运行阻力作为补偿,获取列车总牵引力的指令值。通过控制策略来完成对能量耦合模块的反转。控制策略的核心是列车的能量管理策略。
3 能量管理策略
混合动力有轨电车的能量管理策略主要分为非接触供电区域和无供电区域两部分。为了保证电池安全和减缓电池性能衰退,无论是否为非接触供电区段,都应尽量将电池使用时的电荷状态,即剩余电量QSOC保持为10%~90%[15-16]。
3.1 无供电区域
当混合动力有轨电车运行在无供电区域时,能量管理策略逻辑如图4所示。
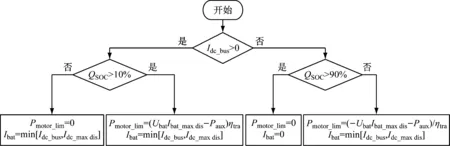
注:Idc_bus为直流母线的电流;Pmotor_lim和Ibat_maxdis分别表示电机的限制功率以及锂电池的最大放电电流;Paux表示辅助系统功率;Ibat_maxcha和ηtra分别表示锂电池的最大充电电流和牵引系统的效率。
当列车运行在无供电区域时,只有锂电池能为列车运行提供能量。若母线电流Idc_bus<0,则说明此时有制动能量回馈到直流母线,列车可能处于牵引工况,或虽然为制动工况,但由于制动功率较低,导致此时锂电池仍对外输出能量。当锂电池的QSOC不小于90%,则锂电池不回收制动能量,列车停止电制动;若锂电池SOC小于90%,则锂电池可以回收制动能量,若母线电流大于锂电池可吸收的最大电流,则锂电池以最大充电电流回收制动能量;若母线电流小于锂电池可吸收的最大电流,则按照母线上的电流回收制动能量。
若Idc_bus>0,则列车处于牵引工况。当锂电池的QSOC高于10%时,锂电池可用:若此时母线需求电流大于锂电池可提供的最大电流,则锂电池输出最大放电电流;若母线电流小于锂电池可提供的最大电流,则输出满足母线需求的电流即可。若锂电池的QSOC低于10%,则对列车进行“限功”,不再进行牵引。
3.2 非接触供电区域
当列车运行在非接触供电区段时,也需先判断Idc_bus的正负。其能量管理策略如图5所示。

注:ICPI_rat为非接触供电系统的额定电流;Ibat_dis max为锂电池的最大放电电流;Imotor_lim为电机的限制电流。
若Idc_bus<0时,则能量管理策略与无非接触供电区域一样。
当母线上的电流Idc_bus>0时,说明列车在进行牵引,需先确定锂电池QSOC的情况。当锂电池QSOC大于10%且小于等于40%时,非接触供电系统以额定电流供电,其余电流由锂电池提供。当锂电池QSOC大于40%且小于等于60%时,进行滞环控制:若进入当前锂电池QSOC区间的上一次区间状态大于10%且小于等于40%,则按照该区间的能量控制策略进行控制;若进入当前锂电池QSOC区间的上一次区间状态大于60%且小于等于90%,则进行与该区间相同的能量管理策略。当锂电池的QSOC大于60%且小于等于90%时,判断母线的需求电流是否大于电池系统可以输出的最大电流:若大于,则非接触供电系统以额定电流输出,锂电池提供其余所需电流;若不大于,则由锂电池输出全部母线需求电流,非接触供电系统不输出电流。
4 仿真分析
基于MATLAB软件,建立基于EMR的混合动力有轨电车仿真计算模型(以下简为“有轨电车EMR模型”),其架构如图6所示。
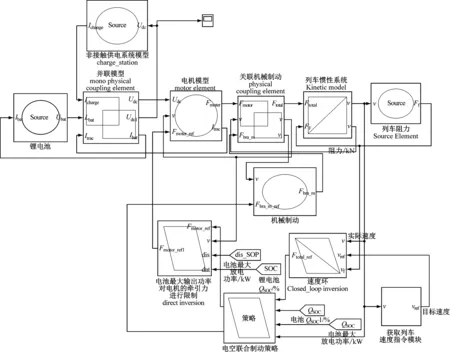
注:Ichange为非接触系统的充电电流;Ibat为锂电池的电流;v为列车的速度;Ftotal为总牵引力;Fmoter为电机牵引力;Fmoter_ref,1为电机牵引力指令值;source为能量源或能耗源;dis为放电。
4.1 模型的准确性验证
为了验证有轨电车EMR模型的准确性,本文选用某有轨电车的实际运营线路数据进行仿真。考虑项目的实际情况及安全需要,除站点附近外,线路全面铺设为非接触供电区段。非接触供电区段的实际铺设方式(以下称为“铺设方式一”)基本情况见表3。
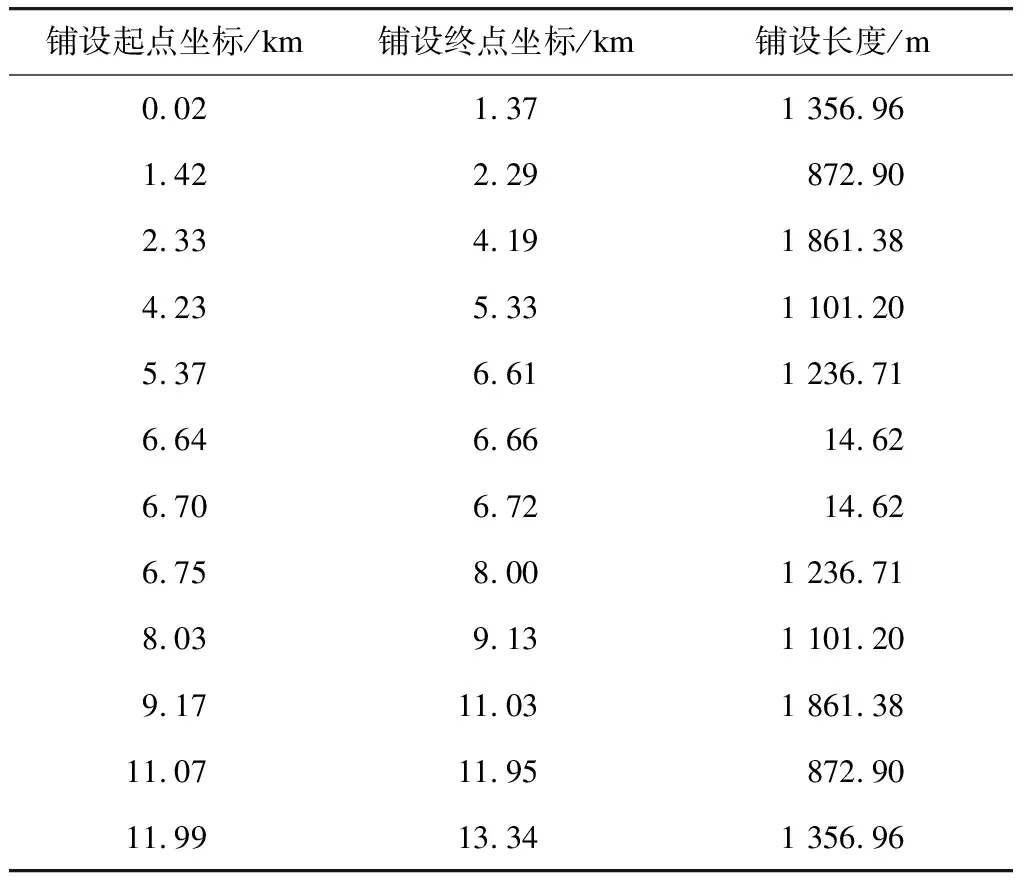
表3 铺设方式一的基本情况
列车实际运行速度作为输入的参考值,按实际配置及数据运行有轨电车EMR模型后,可得列车运行速度仿真值。列车运行速度的参考值和仿真值如图7所示。
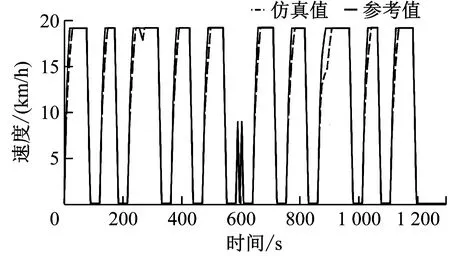
图7 铺设方式一的列车运行速度
由图7可以看到,列车在加速时,列车运行速度仿真曲线的加速度值略小。经分析,在给定的能量配置下,混合动力系统提供的能量不能完全满足列车加速时的功率需求,或者是电机的性能限制了列车的加速度值,故而导致速度仿真值与实际的参考值有偏差。
由图7还可看到,在列车恒速时,仿真值与参考值几乎相等。这说明在给定的配置下,储能系统能满足列车速度峰值的需求。
综上可知,由有轨电车EMR模型计算得到的速度仿真值不仅能够跟随输入的速度参考值,还能反映列车在给定配置下各种限制条件对速度的影响。这表明该模型仿真精度较高,且对列车实际运行具有参考价值。
4.2 不同铺设方式的仿真
在铺设方式一情况下,当非接触供电系统与锂电池共同为列车提供能量时,二者的功率如图8所示。进一步计算可得此时锂电池的QSOC曲线如图9所示。

图8 铺设方式一的非接触供电系统与锂电池功率
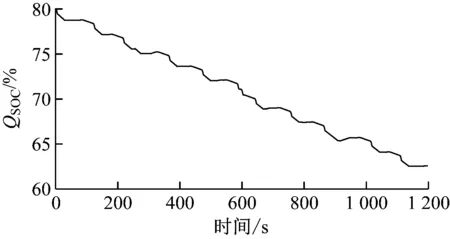
图9 铺设方式一的锂电池QSOC曲线
调整非接触供电区段的铺设长度及位置,对应的非接触供电区段铺设方式(以下称为“铺设方式二”)基本情况如表4所示。

表4 铺设方式二的基本情况
按表4数据运行有轨电车EMR模型,得到2个动力源的功率曲线及锂电池的QSOC曲线,如图10、图11所示。
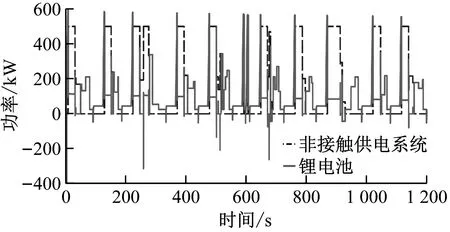
图10 铺设方式二的非接触供电系统与锂电池功率
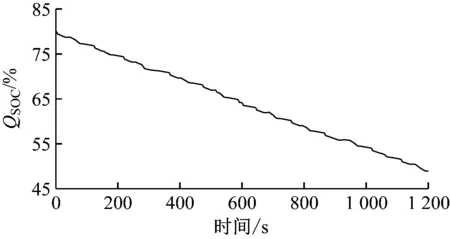
图11 铺设方式二的锂电池QSOC曲线
对比上述仿真结果可以看出,铺设方式一的锂电池QSOC曲线变化区间较小。这说明,与铺设方式二相比,铺设方式一下有轨电车运行时对锂电池的使用明显更少。此外,铺设方式二虽缩短了非接触供电区段的铺设长度,但仍能满足有轨电车在该线路上运行时的功率和能量需求。由此可见,项目实际采用的铺设方式一存在一定程度的浪费,采用铺设方式二能有效节省有轨电车运营的整体成本。
5 结语
本文在MATLAB软件中建立了有轨电车EMR模型。由实际运行数据验证了该模型的准确性。
在确定的能量管理策略下,有轨电车EMR模型能够准确快速地模拟不同配置下整车及动力系统、牵引系统等子系统的运行情况,能模拟列车在储能系统故障丧失部分动力时的运行情况,还能验证列车储能系统配置的合理性及故障应对能力。
本文建立的有轨电车EMR模型还可通过修改对应模块的参数和算法,来适应不同配置或不同能量管理策略,进而通过仿真计算得到相关功率及能耗等数据。这也验证了该模型的广泛应用性。
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
建材发展导向(2019年10期)2019-08-24
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2018年23期)2018-12-26
知识经济·中国直销(2017年8期)2017-09-05
科技知识动漫(2017年4期)2017-04-15
舰船科学技术(2016年1期)2016-02-27
百科探秘·航空航天(2015年3期)2015-12-01
中国火炬(2014年11期)2014-07-25
