
船舶岸电的应用与研究
2022-12-07 03:18山东理工大学高月昊贾明娜
电力设备管理 2022年21期
山东理工大学 高月昊 贾明娜
1 船舶岸电国内外应用现状
1.1 PQ控制原理分析
PQ控制又称恒功率控制。其控制主要目的是使输出的有功和无功功率跟踪其参考值功率,岸电并网的频率和电压由大电网支撑。PQ控制可有效保证发电功率输出的稳定,使敏感负荷和重要负荷免于干扰,确保系统正常运行。
从图1可看出,当岸电电源的频率在允许的范围内(fmin≤f≤fmax)变化时,逆变器输出的有功功率维持在给定的参考值Pref;当岸电电源的电压幅值在允许的范围内(Vmin≤V≤Vmax)变化时,逆变器输出的无功功率维持在给定的参考值Qref。岸电电源采用PQ控制的逆变器的主电路为三相全桥电路,逆变器输出采用LC滤波器。控制部分包括功率控制模块、电流控制模块、锁相环(PLL)、相位预同步模块和PWM调制模块。电流环PI控制器可实现对指定电流值的跟踪,达到无静差控制的效果,电流环的等效图如图2。

图1 PQ控制原理图

图2 电流内环控制框图
1.2 PR和QPR控制原理分析
PR控制是由Garcia和Morari在二十世纪八十年代提出的内模原理的应用。内模原理一个典型应用就是工程上最常用的PI控制器中的积分环节。内模原理是将某一频率对应的指令信号的模型加入到控制系统中,则加入后的控制系统对于这一频率有无穷大的增益、能对此频率实现无静差跟踪,而对于其它频率增益很小,没有跟踪效果。PR控制器数学理论基础虽然早在二十世纪就已提出,但在有源滤波器中使用的时间并不长,近年PR控制器大量应用于并网逆变器入网电流控制当中。
其传递函数为:GPR(s)=Kp+2Krs/(s+ω02),这其中:Kp和Kr分别为比例环节和积分环节的系数。当给定交流信号的角频率为ω0时,将s=jω0代入上式得到PR控制器在此频率处的增益为:GPR(jω0)=Kp+2Krω0/((jω0)2+ω02)=∞。
虽然PR控制器性能优异,但现实中电网的频率会发生轻微偏移。PR控制器对于指定次频率增益无限大,但对指定频率附近其他频率几乎没有増益。当电网频率发生偏移PR控制器的控制效果大打折扣,因此准比例谐振控制器(QPR)产生了,它能有效增加指定谐振频率附近的频率的増益,防止系统频率波动时无法实现良好的控制。
在PR控制器的jω轴上加入两个频率固定不变的闭环极点,即构成准比例谐振控制器(QPR),传递函数为:GQPR(s)=Kp+2Krωcs/(s2+2ωcs+ω02)。其中:ω0为指定次谐波频率,ωc为截止频率。当给定交流信号的角频率为ω0时,将s=jω0代入上式得到QPR控制器在此频率处的增益为:GQPR(jω0)=Kp+2Krωcjω0/((jω0)2+2ωcjω0+ω02)。
准比例谐振控制器在指定次谐波处增益虽不是无穷大,但也能满足指定次频率的控制要求,通过调节Kr还能调节带宽,适当增加带宽能抵消频率波动带来的影响,其控制框图如图3。
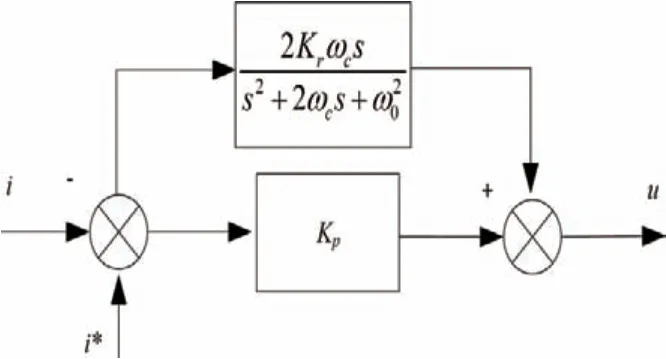
图3 QPR电流控制器的控制框图
由QPR控制器传递函数GQPR(s)可看出,影响控制器性能的参数有Kp、Kr和ωc,因此可通过控制变量法选取几组参数进行对比分析,确定各参数对各个控制器的影响。不同参数时PI、PR与QPR控制器控制参数Kp增大而其他参数不变时,QPR控制器低频和高频位置幅值均增大,相应的相位裕度也变大;控制参数Kr增大而其他参数不变时,QPR控制器峰值增益变大;控制参数ωc增大则控制器带宽明显变大,ωc参数影响控制器带宽大小。据此分析可知,根据系统峰值增益需求可选择较大的Kr和ωc值,使系统获得较大的峰值增益、减小基频处的稳态误差,同时系统获得较大的带宽可更好地适应电网频率变化,保证系统稳定性。
2 基于重复+QPR的船舶岸电并网控制
为实现并网电流的无静差控制,引入重复控制策略、并与QPR控制相配合,以期提高LCL型并网逆变器的输出控制性能[1-2]。
2.1 重复控制原理分析
基于内模原理的重复控制器,可有效地消除控制系统内周期性的扰动和误差,主要应用于输入为周期性信号的系统,这与并网逆变器的给定和扰动量皆为正弦信号的特性相契合。因此,选择重复控制作为并网逆变器输出电流的跟踪策略。

图4 重复控制器内模结构图
在离散域下传递函数为:G(s)=1/(1-Q(s)Z-N),式中:N为一个基波周期的采样次数,Q为内模系数。为提高重复控制器自身的稳定性,Q通常取值为略小于1的常数,或者为增益小于1的低通滤波器。但Q并不是越小越好,不同的Q对系统的影响不同。重复控制在基波频率和基波倍数频率处具有高增益和零相移特性,Q越大幅值处增益越大,系统稳态精度越高,但稳定性越差;Q越小幅值处增益越小,控制精度较差,但稳定性较强。
根据稳定性判据和重复控制的频率特性可知,G(s)本身不存在稳定性问题。但如直接将其应用于逆变器的电流控制,则由于LCL滤波器的原因将导致系统的相频特性曲线穿越负180°,带来稳定性问题。因此在实际的应用中,除内模环节,重复控制器还包括延迟环节Z-N和补偿器M(s)。从图5可见,重复控制属延时控制,其中包含的延时环节使其输出的动态性能较差,因此将重复控制与其他控制方法进行组合互补,效果最佳。

图5 重复控制器结构图
2.2 基于重复+QPR的并网逆变器控制
在控制原理的基础上引入重复控制策略;同时为提高系统的动态性能,将指令电流前馈至QPR控制器。基于重复+QPR控制的LCL型并网逆变器控制原理如图6所示,其中Grep为重复控制器的传递函数。在此基础上,可设计基于重复+QPR控制的PQ控制器(图7),据此绘制出重复+QPR控制系统的结构框图。
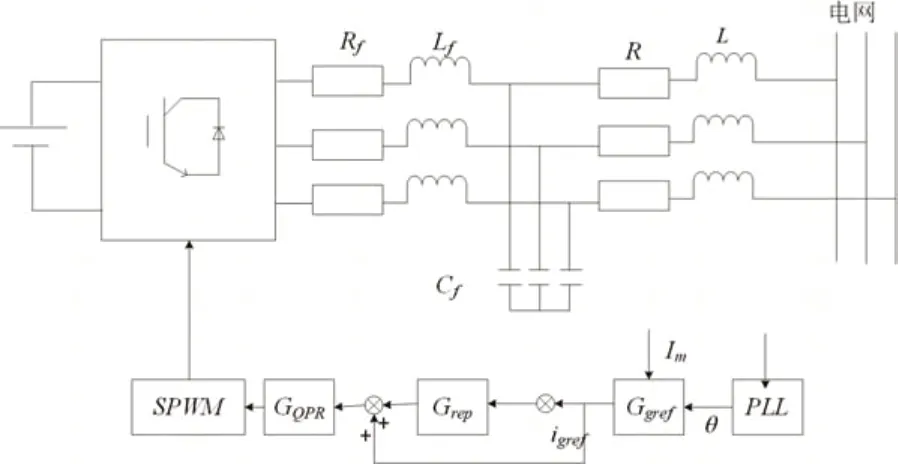
图6 重复+QPR控制原理图
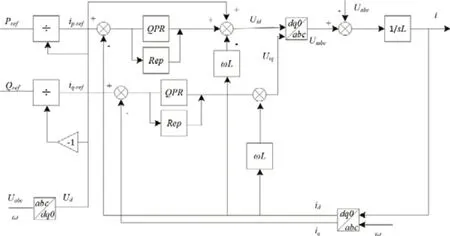
图7 基于重复+QPR控制的PQ控制器结构图
图8展现了内外环间的结构关系:QPR控制作为内环,结合并网电流反馈,增加系统阻尼;重复控制作为外环实现对并网电流Ig的无静差跟踪。同时,将重复控制器的输出信号与指令电流信号Igref叠加作为QPR控制器的输入信号,以期在指令电流改变时瞬时值反馈内环能快速响应前馈电流指令,消除重复控制的固有一周期延时,提高整个系统的动态响应能力。

图8 重复+QPR控制系统框图
3 仿真分析
重复+QPR控制策略用于并网系统中,根据对重复+QPR控制策略的分析,在Matlab/Simu_link环境下建立PQ控制下基于重复+QPR的电流内环仿真模型图。设定总仿真时间为0.5s,仿真中0到0.25s之间发电输出有功功率为Pref=10kW,无功功率为Qref=0kVar;0.25s至0.5s之间发电输出有功功率为Pref=15kW,无功功率为Qref=6.5kVar。为提高仿真速度,岸电电源用650V直流电压源代替,负荷容量为500kW恒功率负荷,微电网三相交流电压相电压值为380V。电流PI调节器参数设定为Kp=800、Kr=800、Wc=100,滤波器参数设定为R=0.01Ω、L=0.009H、C=110μF, 采 用SPWM调制。
图9中,上方为有功功率输出、下方为无功功率输出。可看出,PQ控制下采用重复+QPR控制不仅能有效控制发电的有功和无功输出,还可使得有功和无功功率都能更好地跟踪给定参考值,系统运行更加稳定,响应速度更快,控制性能更好。

图9 PQ控制下基于重复+QPR的仿真波形图
猜你喜欢
心理学报(2022年10期)2022-10-12
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
北京航空航天大学学报(2021年6期)2021-07-20
珠江水运(2021年8期)2021-05-24
成都信息工程大学学报(2021年6期)2021-02-12
电声技术(2020年7期)2020-12-16
电子制作(2019年19期)2019-11-23
电机与控制学报(2018年9期)2018-05-14
演艺科技(2017年1期)2017-03-09
