
河蟹养殖智能化投饵装备适用性能试验研究*
2022-12-02 06:03沈启扬朱虹于庆旭葛迅一钱军黄炜
中国农机化学报 2022年12期
沈启扬,朱虹,于庆旭,葛迅一,钱军,黄炜
(1. 江苏省农机具开发应用中心,南京市,210017; 2. 农业农村部南京农业机械化研究所,南京市,210014; 3. 苏州市农业机械技术推广站,江苏苏州,215128; 4. 常州市金坛区农机化技术推广中心,江苏常州,213200)
0 引言
2019年中国河蟹养殖产量为778 682 t,其中江苏省产量为364 840 t,约占全国河蟹养殖总产量的46.85%,位居第一。目前,国内河蟹养殖水面一般为1~2 hm2,投饵喂料是河蟹养殖中任务繁重而又关键的一项工作,因为饲料成本占到整个投资成本的50%以上[1];由于河蟹不能大范围运动,定点投喂不适合河蟹养殖,需要满塘口撒喂,投喂工作量极大[2-5]。目前河蟹养殖主要采用人工撑船撒喂、背负式喷雾机洒喂、船体+简易小型电动撒料机进行投饵喂料的作业方式,存在投饵作业效率低、劳动强度大,饵料抛撒分布一致性和均匀性差的问题,河蟹长期处于饱一顿饥一顿的状态,不利于大规格河蟹的培育[6-10]。大规格河蟹价格比小规格河蟹价格高3~4倍,因此,河蟹养殖正由追求产量的“大养蟹”向以质量效益为中心的“养大蟹”“养高品质蟹”转变。只有根据河蟹需求精准投饵,才能保证养殖的河蟹个头大而均等、河蟹蜕壳同步,回捕率高。
河蟹投饵的发展依赖于科技创新和科技进步[11]。随着农业电气化、自动化技术和智能化的发展,出现一些自动投饵设备[12-15],如遥控自动投饵船[16]、颗粒播撒无人机[17]等,为给广大用户提供参考,对已有利用自主导航精准投饵作业的装备进行试验,通过对颗粒饲料撒播无人机和智能投饵(药)船的投饵能力、投饵破损率、最大投饵幅宽、航线规划能力、自主控制模式行驶轨迹精度、续航能力的测定,测试机具作业性能;通过对生产率、投饵效率比、经济效益的测定,测试机具效能。
1 河蟹养殖投饵要求
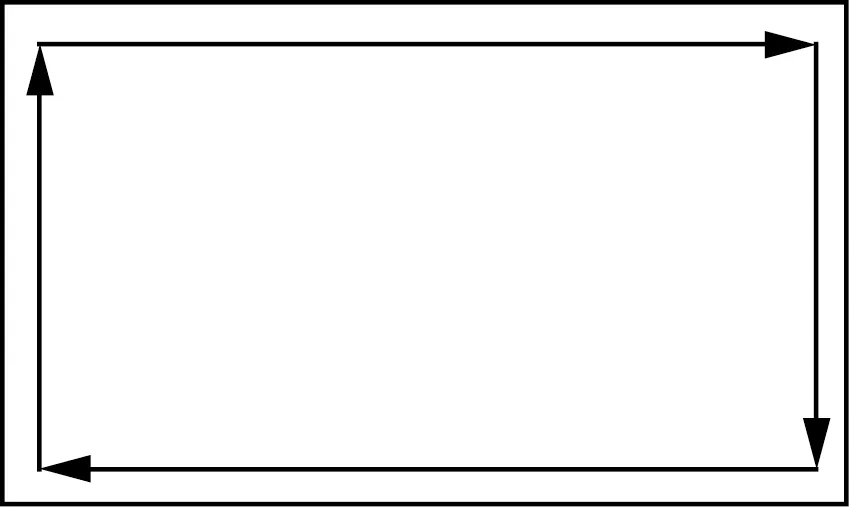
养河蟹需要大范围移动均匀投饵。由于河蟹喜欢在浅水处觅食,且夜间觅食更多,因此在投喂时,应在岸边浅水处多点均匀投喂(图1),当单个池塘养殖面积较大时需采用全覆盖满塘均匀投饵(图2)。此外,可根据池塘形状尺寸、水草覆盖率、增氧管路、电线排布等设定投饵路线。

图1 岸边浅水处投饵路线
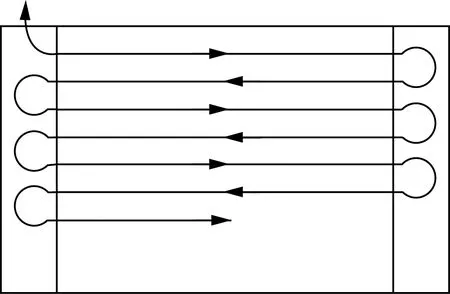
图2 全覆盖满塘均匀投饵路线
2 试验机型及工作原理
颗粒饲料撒播无人机为3WWDZ-15.1B型颗粒饲料撒播无人机(下文简称:无人机),无人机结构与性能参数如表1所示。该机型可在投饵区域自动规划投饵装备的作业航线,投饵装备从出发点出发,以自主控制模式沿自动规划的作业航线进行投饵作业,当颗粒物料投饵完,投饵装备可安全自动返回。
智能投饵(药)船为SAN320型智能投饵(药)船(下文简称:无人船),无人船结构与性能参数如表2所示。该机型可在投饵区域人工规划投饵装备的作业航线(包括不规则路线),投饵装备从出发点出发,以自主控制模式沿规划好的作业航线进行投饵作业,当颗粒物料投饵完,投饵装备可安全自动返回出发点。可一次同时完成投饵和施药作业。

表1 无人机结构与性能参数Tab. 1 UAV structure and performance parameters

表2 无人船结构与性能参数Tab. 2 Unmanned ship structure and performance parameters
3 材料和方法
3.1 试验条件
苏州浪里王虾蟹生态双主养殖基地(下文简称:苏州试验地点),塘口尺寸规则,单个塘口占地面积为1.33 hm2,水草覆盖率为60%~70%,水深度为0.5~1.5 m,主要饲养螃蟹品种为中华绒螯蟹“长江1号”,养殖密度约12 000 只/hm2,随着螃蟹的体重增加,投饵量需逐步增加,投饵质量范围为7.5~30 kg/hm2,每天早、晚共需投饵2次。饲料选用大颗粒饲料。江苏金坛数字化渔场(下文简称:常州试验地点),塘口尺寸规则,单个塘口面积为0.6~1.45 hm2。养殖条件与苏州类似,饲料选用小颗粒饲料。
3.2 试验方法
依据DG32/Z003—2019《智能投饵(药)机》、DG/T 064—2019《投饲机》、NY/T3881—2021《遥控飞行播种机质量评价技术规范》、GB/T 5667—2008《农业机械生产试验方法》、《河蟹养殖智能投饵装备技术试验示范》项目试验大纲,在苏州和常州两地开展颗粒饲料撒播无人机、智能投饵(药)船以及人工投饵作业性能和效能评定进行试验。作业性能试验包括投饵能力、投饵破碎率、最大投饵宽幅、航线规划能力、自主控制模式行驶轨迹精度、续航能力。效能评定包括生产率、投饵效率比、经济效益。
3.2.1 性能试验方法
1) 投饵能力。投饵能力即为单位时间内最小至最大投饵质量的范围。将准备投饵的颗粒饲料称重后装入物料箱,并记录装入的颗粒饲料质量。将投饵装备的间歇闭合时间调节到最短,供料量调节到最小和最大档位,分别记录抛投完的时间,按式(1)计算最小和最大档位投饵量。每组试验重复3次,取平均值。
C=m/t
(1)
式中:C——投饵量,kg/min;
m——抛投的颗粒饲料质量,kg;
t——抛投时间,min。
2) 投饵破损率。物料箱中装入新的颗粒饲料,以最大投饵能力状态试验,在出料口处用软布袋收集抛出的颗粒饲料并称重,用网孔边长尺寸为颗粒直径0.8倍左右的试验筛进行筛分,将筛下的细粉和碎粒称重,按式(2)计算投饵破碎率,重复3次,取平均值。
B1=m1/m2×100%-B
(2)
式中:B——饲料原始碎率;
B1——投饵破碎率;
m1——筛下物(细粉和碎粒)的质量,kg;
m2——收集颗粒饲料的质量,kg。
3) 最大投饵幅宽。最大投饵幅宽试验(图3)在投饵试验区内,沿播幅方向,即投饵装备的预设行驶航线的垂直方向,无人机试验时将收集器连续排列成一排,无人船试验时将收集器等间距按规律排列成一排,试验时均沿中轴线行驶投饵。加注额定容量颗粒饲料,测试投饵装备最大投饵能力时的投饵幅宽,无人机以3 m作业高度、3 m/s行驶速度,在采样区前50 m开始投饵,后50 m停止,一次完成投饵作业;无人船架设在移动小车上,无人船加注额定容量颗粒饲料,以1 m/s 速度行驶,在采样区前10 m开始投饵,后10 m停止,一次完成投饵作业。从采样区两端逐个收集盒进行检查,两端首个有颗粒饲料的收集盒作为投饵播幅两个边界,投饵播幅边界间的距离为投饵幅宽。测量3次取平均值,最终确定最大投饵幅宽。
4) 航线规划能力。操作者在地面控制端规划好投饵区域,系统可自动规划投饵装备的作业航线,机手启动投饵装备,投饵装备从出发点出发,以自主控制模式沿自动规划的作业航线进行投饵作业,当颗粒物料投饵完,投饵装备可安全自动返回出发点。

(a) 无人机方案

(b) 无人船方案
5) 自主控制模式行驶轨迹精度。在试验场地内预设投饵装备行驶航线,无人机的航线长度不小于120 m,行驶速度为3 m/s,无人船的航线长度不小于50 m,行驶速度为1 m/s。操控投饵装备以自主控制模式沿预设航线行驶,同时以不大于0.1 s的时间间隔对投饵装备的空间位置进行连续测量和记录,自主控制模式行驶精度试验方法如图4所示,重复3次。
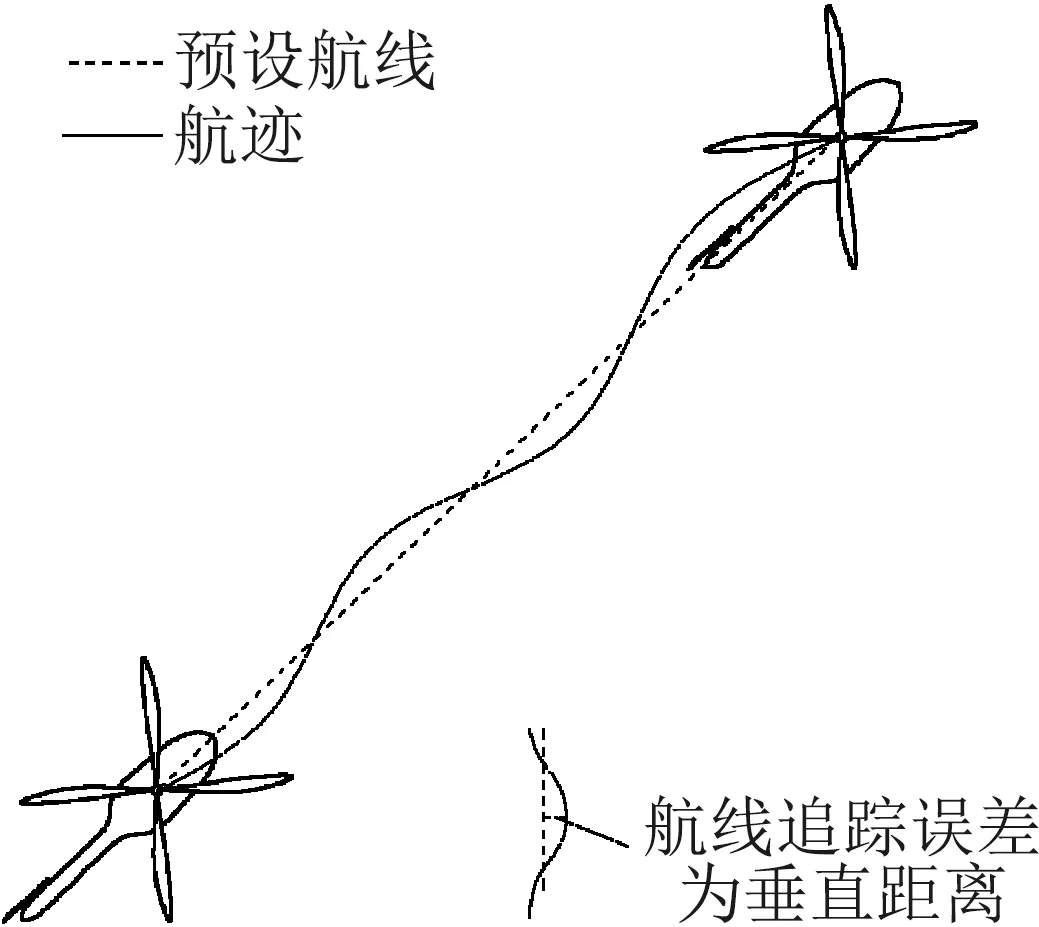
图4 自主控制模式行驶精度试验方法
将记录的航迹经纬度坐标按cgcs2000的格式进行直角坐标转换;投饵装备的空间位置坐标记为(xi,yi,zi),i=0,1,2,…,n,其中i=0时为行驶过程中剔除加速区间段的稳定区开始位置,i=n时为行驶过程中剔除减速区间段的稳定区终止位置。
整条航线的平面位置坐标记为ax+by+c=0,a、b、c系数依据航线方向和位置而定,按式(3)、式(4)分别计算偏航距(水平)Li和速度偏差Vi,测量值应为测量区间内计算的最大值。
(3)
Vi=|vi-vset| (i=0,1,2,…,n)
(4)
式中:Li——偏航距(水平),m;
xi——采集航迹点位置的东西方向坐标值,m;
yi——采集航迹点位置的南北方向坐标值,m;
zi——采集航迹点位置的高度坐标值,m;
Vi——速度偏差,m/s;
vi——采集航迹点位置的行驶速度,m/s;
vset——预设的行驶速度,m/s。
6) 续航能力。无人机使用满电电池,加入额定容量的颗粒饲料,操控无人机在试验场地内以3 m/s作业速度、最小投饵量进行投饵,在其发出颗粒饲料撒完的提示信息后,将无人机飞至岸边上空,保持无人机在岸边上空悬停,直至其发出电量不足报警后停止,记录单架次最大作业时间为t1、起航至停止总时间t2。计算t2/t1数值,重复3 次,取最小值。因无人船充满电能满足1天工作量,故不再做续航能力试验。
3.2.2 效能评定
1) 生产率。投饵装备使用满电电池,加入额定容量的试验饲料,按照正常生产作业进行试验,分别记录班次作业面积U、纯作业时间Tc、工艺服务时间(换电池、加饲料等)、充电时间、机具故障时间和机具转移时间等;作业时间Tz包含纯作业时间Tc和工艺服务时间(换电池、加饲料等);班次时间Tb包含作业时间Tz、充电时间、机具故障时间和机具转移时间等。纯作业生产率、作业生产率、班次生产率分别按式(5)~式(7)计算。
(5)
(6)
(7)
式中:Wc——纯作业生产率,hm2/h;
Wz——作业生产率,hm2/h;
Wb——班次生产率,hm2/h。
2) 投饵效率比。投饵效率比试验与生产效率试验同时进行,先测算人工投饵班次小时生产率,再计算无人机、无人船相对人工作业的投饵效率比,投饵效率比η按式(8)计算。
(8)
3) 经济效益。由于时间和天气条件等限制,目前田间试验仅在3个池塘中试验,本文根据实际作业情况估算得到无人机、无人船和人工的班次生产效率,来估算常州试验地点各机具的经济效益,常州试验地点共15个池塘,总面积为15.934 hm2,假设各机具寿命年限均为6年,每年机具的维修费按照机具价格5%计算,折旧费、电耗费按照式(9)、式(10)计算。

(9)
电耗费=电费价格×电机数量×电机功率/75%
(10)
4 试验结果与分析
4.1 智能投饵装备作业性能试验
4.1.1 投饵能力
通过预试验,确定无人机投饵大颗粒饲料和小颗粒饲料时,最小投饵能力的仓门开度大小均为20%,最大投饵能力的开度大小均为100%。将准备的饲料称重后装入料箱,分别记录无人机仓门开度大小为20%和100%时的投饵作业时间,试验过程中采用塑料薄膜罩在排料口,收集离心圆盘撒出的颗粒饲料,防止颗粒饲料飞溅。无人船投饵大颗粒饲料和小颗粒饲料时,最小投饵能力的下料状态均为4档,最大投饵能力的下料状态均为10档。将准备的颗粒饲料称重后装入料箱,分别记录最小和最大投饵能力时的投饵作业时间。采用塑料薄膜或绒布罩在排料口,收集离心圆盘撒出的颗粒饲料,防止颗粒饲料飞溅。
无人机投饵大颗粒饲料时投饵能力为2.04~32.30 kg/min,无人机投饵小颗粒饲料时投饵能力为3.28~35.10 kg/min。无人船投饵大颗粒饲料时投饵能力为0.75~3.02 kg/min,无人船投饵小颗粒饲料时投饵能力为1.00~1.94 kg/min。
4.1.2 投饵破损率
无人机和无人船均采用塑料薄膜或绒布罩在排料口四周,无人机下方布置收集盒,离心圆盘撒出的颗粒饲料撞击在蓬松状态的塑料薄膜或绒布上,落在下方的收集盒内,试验结束后,记录收集盒内颗粒饲料质量,大颗粒饲料采用孔径2.5 mm标准筛进行筛分,小颗粒饲料采用孔径1.6 mm标准筛进行筛分,再记录标准筛内的颗粒饲料质量,计算筛下物(细粉和碎粒)的质量。无人机投饵破损率试验数据如表3所示,无人船投饵破损率试验数据如表4所示。

表3 无人机投饵破损率试验数据Tab. 3 Test datas of UAV feeding damage rate
由表3可以看出,无人机投饵大颗粒饲料的破损率平均值为0.28%,投饵小颗粒饲料的破损率平均值为0.32%;由表4可以看出,无人船投饵大颗粒饲料的破损率平均值为2.07%,投饵小颗粒饲料的破损率平均值为1.80%;均符合DG32/Z003—2019《智能投饵(药)机》、DG/T 064—2019《投饵机》破损率指标要求。

表4 无人船投饵破损率试验数据Tab. 4 Test datas of unmanned ship feeding damage rate
4.1.3 最大投饵幅宽
无人机最大投饵幅宽测定是将90个收集盒连续排成一排,收集盒宽度A为165 mm,收集盒布置的幅宽为14.85 m,收集盒内加入适量的水,防止颗粒饲料进入收集盒中再弹跳出来;无人机的仓门开度大小100%、离心圆盘速度1 300 r/min,在采样区前50 m开始投饵,等投饵机构工作稳定后,沿着中间轴线的预设航线,以3 m高度、3 m/s速度匀速行驶,离开采样区后50 m停止投饵,依次清点各收集盒中颗粒饲料数量。无人船最大投饵幅宽测定是将26个收集盒排成一排,收集盒宽度A为165 mm,收集盒之间距离C为250 mm,收集盒布置幅宽为10.54 m,收集盒内加入适量的水,防止颗粒饲料进入收集盒中再弹跳出来;将无人船固定在电动三轮车上,排料口离地距离为0.8 m,采用下料状态10档、投饵状态10档进行最大投饵幅宽试验。在采样区前10 m开始投饵,等投饵机构工作稳定后,沿着中间轴线的预设航线,电动三轮车以约1 m/s速度匀速行驶,离开采样区后10 m 停止投饵,依次清点各收集盒中颗粒饲料数量。
从采样区两端逐个收集盒进行检查,两端首个有颗粒饲料的收集盒作为投饵播幅两个边界,投饵播幅边界间的距离为投饵幅宽,无人机投饵小颗粒饲料时,图5为无人机颗粒饲料数量分布曲线图,无人机的仓门开度大小为100%、离心圆盘速度1 300 r/min时,无人机投饵小颗粒饲料的最大投饵幅宽平均值超过14.85 m。无人船投饵小颗粒饲料时,图6为无人船颗粒饲料数量分布曲线图,无人船采用下料状态10档、投饵状态10档时,无人船投饵小颗粒饲料的最大投饵幅宽平均值超过10.402 m。

图5 无人机颗粒饲料数量分布曲线图

图6 无人船颗粒饲料数量分布曲线图
4.1.4 航线规划能力
无人机航线规划能力试验(图7)是机手在遥控器APP软件上的地图上添加作业区域,设置作业幅宽,无人机APP软件自动规划好无人机的飞行作业航线;在物料箱中加入适量颗粒饲料,点击开始,无人机自动开始投饵作业,作业完毕自动返回起飞点。无人船航线规划能力试验(图8)是机手在无人船手机APP软件上的地图上可以添加若干个轨迹点,本次试验人工共添加4个轨迹点,APP软件根据打点先后顺序生成无人船的作业航线;在物料箱中加入适量颗粒饲料,点击投饵巡航,无人船自动驶向第1个轨迹点,到达第1个轨迹点后,自动调整船头方向,自动打开投饵机构开始投饵作业,依次驶向第2、3、4和1个轨迹点,到达第1轨迹点后投饵机构停止作业。
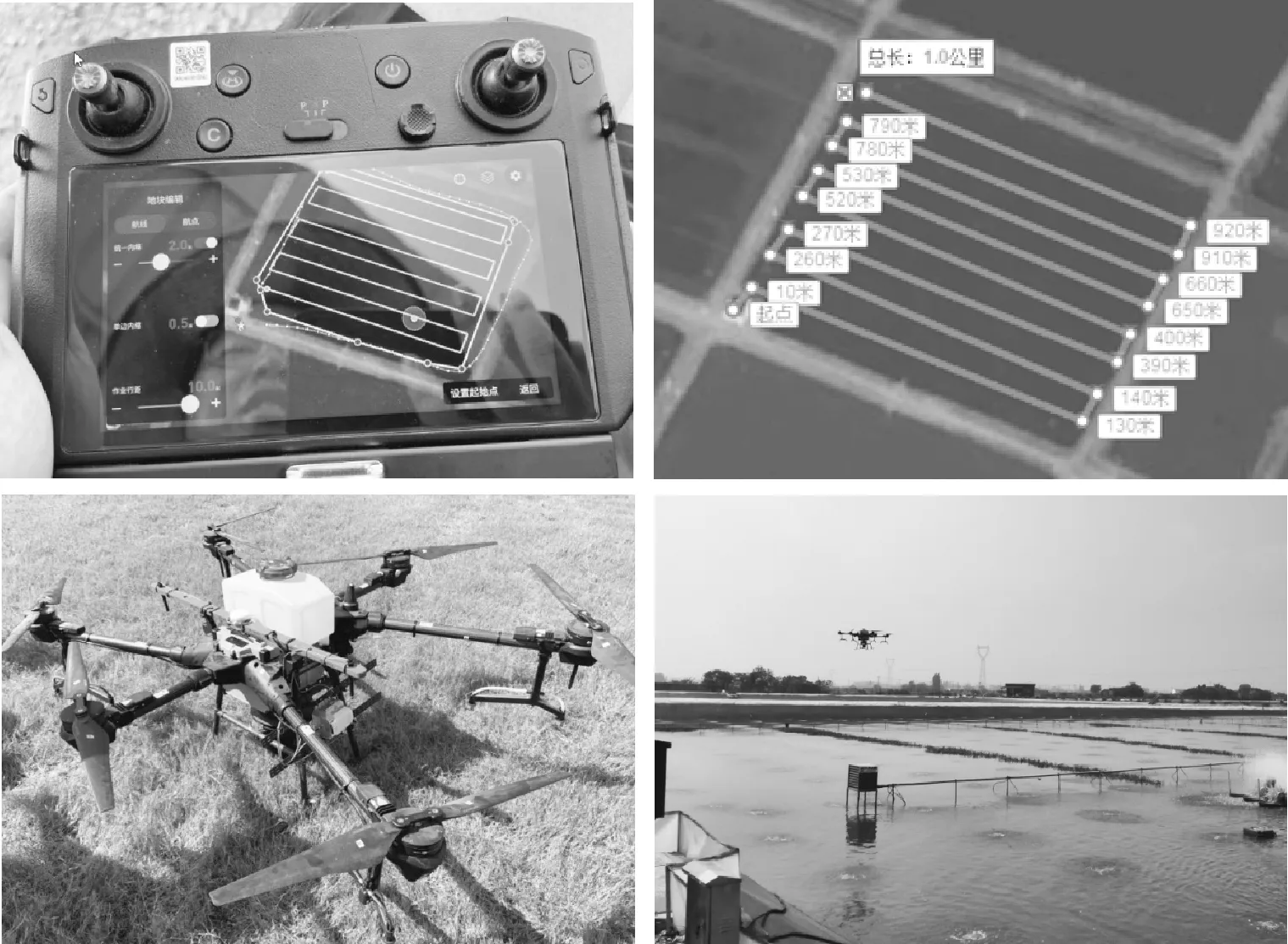
图7 无人机航线规划能力试验
无人机具有航线规划能,在地面控制端添加作业区域,无人机可根据作业区域自动规划无人机的作业航线;无人机可自主从出发点出发,依据自主控制模式沿自动规划作业航线进行投饵作业,颗粒物料投饵完,可安全自动返回出发点。无人船不具有航线规划能,需人工在地面控制端逐个添加轨迹点,无人船根据各轨迹点的先后顺序生成无人船的作业航线;点击开始作业命令,无人船可沿人工规划作业航线进行投饵作业,可安全自动返回。

图8 无人船航线规划能力试验
4.1.5 自主控制模式行驶轨迹精度
无人机自主控制模式行驶轨迹精度试验是将高精度位姿信息检测系统设备的移动端固定在无人机上,机手在遥控器APP软件的地图上添加A、B点,作业幅宽选取4 m,无人机作业速度为3 m/s,高度为3 m,试验重复3次。无人船自主控制模式行驶轨迹精度试验是将高精度位姿信息检测系统设备的移动端固定在无人船上端,机手在手机APP软件的地图上添加轨迹点,本试验共添加4个轨迹点,第1轨迹点到第2轨迹点的航线为航线A,第3轨迹点到第4轨迹点为航线C,航线A和航线C平行,2条航线的距离为6 m,无人船的作业速度为1 m/s,试验重复3次。
高精度位姿信息检测系统设备自动记录无人机行驶轨迹。表5为无人机自主控制模式行驶轨迹精度结果,表6为无人船自主控制模式行驶轨迹精度结果。
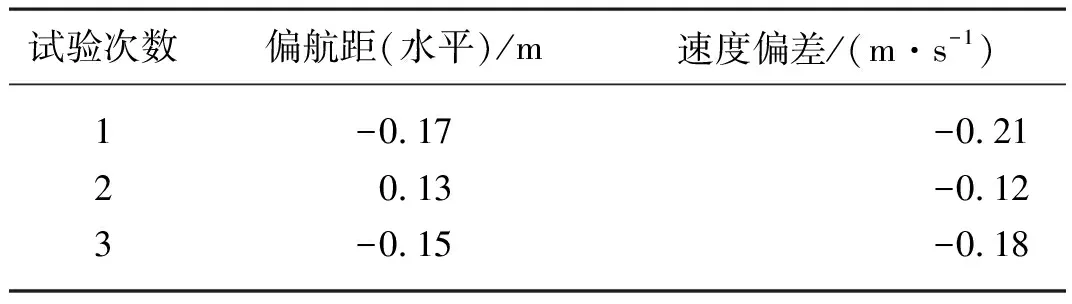
表5 无人机自主控制模式行驶轨迹精度结果Tab. 5 Accuracy results of UAV autonomous control mode driving trajectory
从表5、表6可以看出,无人机最大水平偏航距为-0.17 m,符合NY/T 3881—2021《遥控飞行播种机质量评价技术规范》偏航距(水平)±0.4 m指标要求。无人船最大水平偏航距为-0.73 m(图10无人船航线规划能力试验),符合DG32/Z003—2019《智能投饵(药)机》行驶轨迹精度(直线)±2.5 m指标要求。

表6 无人船自主控制模式行驶轨迹精度结果Tab. 6 Accuracy results of unmanned ship autonomous control mode driving trajectory
4.1.6 无人机续航能力
无人机续航能力试验是将无人机加入额定容量的颗粒饲料,机手在遥控器APP软件的地图上添加A、B点,作业幅宽为10 m,作业速度为3 m/s,高度为3 m,无人机投饵大颗粒饲料时仓门开度采用30%、离心圆盘转速为1 050 r/min,无人机投饵小颗粒饲料时仓门开度采用20%、离心圆盘转速为600 r/min;分别记录单架次作业时间为t1,物料箱内颗粒饲料撒完后,保持无人机在岸边上空悬停,直至其发出电量不足报警后停止,记录起航至停止的总时间t2。试验重复3次。无人船由于充满一次电可以满足1天作业量,故不再做续航能力试验。
无人机续航能力试验数据如表7所示,符合NY/T 3881—2021《遥控飞行播种机质量评价技术规范》最大续航能力1.2倍的指标要求。

表7 无人机续航能力试验数据Tab. 7 UAV endurance test datas
4.2 智能投饵装备效能评定
4.2.1 生产率
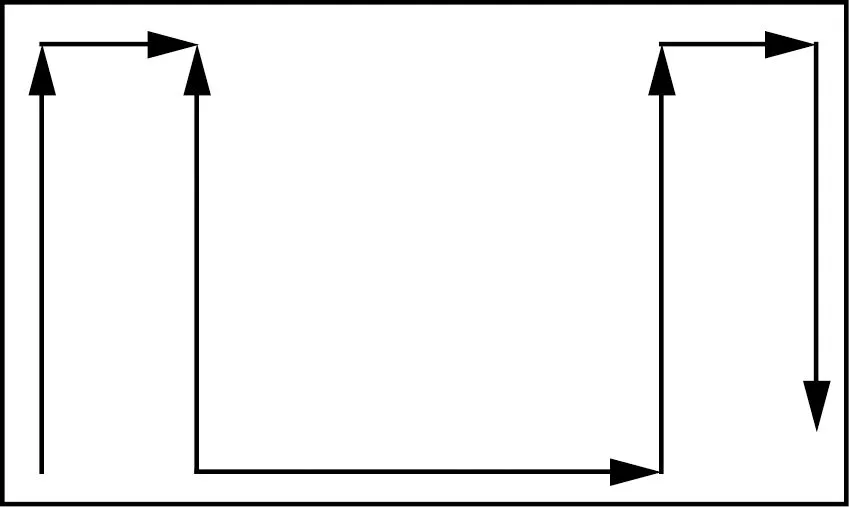
无人机生产率试验在作业面积为1.333 hm2、1.1 hm2、0.867 hm2的池塘进行。分别记录班次作业面积、纯作业时间、工艺服务时间(换电池、加饲料等)、机具故障时间和机具转移时间等。无人机加入额定容量的试验饲料,机手在遥控器APP软件上的地图上添加A、B点,规划好无人机的作业航线,无人机作业航线不受池塘形状尺寸、水草覆盖率、增氧管路、电线排布等影响,所以3个试验池塘的作业航线相似,无人机作业航线示意图如图9所示,无人机作业幅宽为10 m、作业速度3 m/s、飞行高度3 m,无人机投饵大颗粒饲料时采用仓门大小30%、离心圆盘转速1 050 r/min,无人机投饵小颗粒饲料时采用仓门大小20%、离心圆盘转速600 r/min。
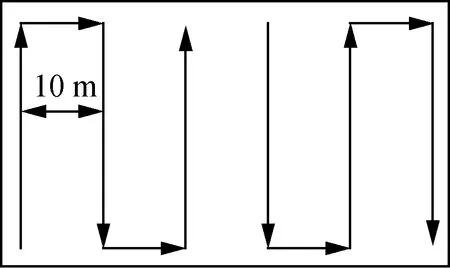
图9 无人机作业航线示意图
无人船生产率试验在1.333 hm2(图10(a))、0.853 hm2、1.087 hm2(图10(b))的池塘进行。分别记录班次作业面积、纯作业时间、工艺服务时间(换电池、加饲料等)、机具故障时间和机具转移时间等。无人船加入额定容量的颗粒饲料,在手机APP软件上的地图上添加轨迹点,规划好无人船的作业航线,无人船作业航线受池塘形状尺寸、水草覆盖率、增氧管路、电线排布等影响,所以3个试验池塘的作业航线不完全相同;无人船投饵大颗粒饲料时采用下料状态5档、投饵状态5档进行试验,无人船投饵小颗粒饲料时采用下料状态4档、投饵状态4档进行试验,作业速度均为1 m/s。
(a) 1.333 hm2 (b) 0.853 hm2、1.087 hm2
前期已经规划好各试验池塘的无人机航迹路线,无人机试验过程中未发生机具故障,换塘作业时无机具转移时间,主要是换电池和加饲料的工艺服务时间,由于加料口尺寸较小,且无漏斗等辅助工具,加饲料时间较长。实际作业过程中,需要给无人机电池充电,目前无人机正常配套1个充电器和4块电池,1个充电器一次可充2组电池,每块电池需要充电15 min左右。通过估算无人机班次小时生产率,常州试验地点共15个池塘,面积为15.934 hm2,假设一个班次连续投饵2遍,班次作业面积U为31.868 hm2,根据实际作业效率估算得到作业时间Tz为13384 s,配备4块电池为满电,每1块电池只作业1块池塘,电池充电时间可与作业时间重叠,2个池塘的作业时间,额外需增加充电时间79 s,可充满2块电池,共需充14次,充电总时间为1 106 s。假设故障时间为0,则非作业时间为1 106 s,班次时间Tb为4.03 h,通过估算得到无人机班次生产率Wb为7.918 hm2/h。
前期已经规划好各试验池塘的无人船航迹路线,无人船试验过程中未发生机具故障,无人船无需更换电池,无人船换塘作业需要4个人工搬运,机具转移时间较长。通过估算无人船班次小时生产率,常州试验地点共15个池塘,面积为15.934 hm2,假设一个班次连续投饵2遍,班次作业面积U为31.868 hm2,根据实际作业效率估算得到作业时间Tz为21543 s,需要转移无人船29次,每次转移时间平均为287 s,机具转移总时间为8 323 s,初始无人船充满电,整个作业过程中无需充电,充电总时间为0。假设故障时间为0,则非作业时间为8 323 s,班次时间Tb为8.30 h,通过估算得到无人船班次生产率Wb为3.841 hm2/h。
4.2.2 投饵效率比
人工投饵效率试验与无人机、无人船的生产效率试验在作业面积为1.333 hm2、0.747 hm2、0.767 hm2的养殖池塘同时进行。每个池塘中都配有一艘船,所以人工作业过程中无机具故障时间和机具转移时间,仅记录班次作业面积、纯作业时间、加饲料的工艺服务时间等。
通过估算人工作业班次小时生产率,常州试验地点共15个池塘,面积为15.934 hm2,假设一个班次连续投饵2遍,班次作业面积U为31.868 hm2,根据实际作业效率估算得到作业时间Tz为15 543 s,机具转移时间为0,充电总时间0,假设故障时间为0,则非作业时间为0 s,但需要考虑人工效率逐渐下降和休息时间,人工降效按70%计算,班次时间Tb为6.17 h,通过估算得到人工班次生产率Wb为5.167 hm2/h。
各试验池塘的形状尺寸、水草覆盖率、增氧管路、电线排布等均不相同,所以在各池塘内人工投饵的作业航线不相同,结合实际生成条件、环境,估算人工作业班次小时生产率,再计算各机具的效率比,由于无人船只有1条试验船,转塘占用时间较长,得出无人机相对人工的投饲效率比为53.24%,无人船相对人工的投饲效率比为-25.66%。
4.2.3 经济效益
人工作业过程中需要配置2人,每个池塘需配置1艘船,每个船按750元计算;无人机价格为48 000元,无人机作业过程中需要配置2人;无人船价格为48 000元,无人船作业过程中需要配置4人;江苏地区每人的工资标准为22元/h,农业生产用电费用为0.509元/(kW·h),假设各机具寿命年限均为6年,每年机具的维修费按照机具价格5%计算,通过估算累计用工费用、总消耗电费、折旧费、维修费等,来计算经济效益。得出无人机平均费用为1 867.05元/hm2,无人船平均费用为5 244.6元/hm2,人工作业平均费用为1 856.25元/hm2。
4.3 综合评定
1) 无人机和无人船投饵能力、投饵破损率、最大投饵幅宽、航线规划能力、自主控制模式行驶轨迹精度、续航能力均符合智能投饵装备作业要求。且河蟹觅食时间大多在晚间,智能投饵装备可以夜间作业,可以替代人工投饵作业。
2) 无人机可在多个池塘间连续投饵作业,无需人工搬运机具进行换塘作业;投饵作业效率、可靠性和转移灵活度高于无人船和人工投饵作业;投饵幅宽优于无人船和人工投饵作业;不受池塘形状尺寸、水草覆盖率、增氧管路、电线排布等影响。
3) 无人船可在下雨、刮风等恶劣天气进行投饵作业;投饵量稳定性、投饵幅宽优于人工投饵作业;作业续航时间较长,充一次电可满足当日投饵作业;可一次同时完成投饵和施药作业。但由于需要转塘造成投饵效率比为负值,建议在大面积池塘使用无人船或多购置无人船可提高投饵效率。
5 结论
1) 本文设计一种评判智能化投饵装备作业性能和效能测试的试验方法,通过对颗粒饲料撒播无人机和智能投饵(药)船进行对比试验,得出的综合评定供河蟹养殖户选购机型提供参考以及研究机械化投饵路径规划和作业要点提供帮助。
2) 试验结果表明:无人机和无人船池塘养殖作业性能稳定,效能良好,投饵能力分别为2.04~35.10 kg/min和0.75~3.02 kg/min,破损率平均值分别为0.28%和2.07%,最大投饵幅宽平均值分别为14.85 m和10.402 m,航线规划能力分别为自动规划和人工规划,行驶轨迹精度最大水平偏航距分别为-0.17 m和-0.73 m,班次生产率分别为7.918 hm2/h和3.841 hm2/h,投饲效率比分别为53.24%和-25.66%,平均费用分别为1 867.05元/hm2和5 244.6元/hm2,人工作业平均费用为1 856.25元/hm2。
3) 河蟹养殖过程需要投喂动物饲料,建议在现有机具上改进升级具备投喂动物饲料的智能投饵装备。
猜你喜欢
当代水产(2022年8期)2022-09-20
粮食与饲料工业(2022年2期)2022-04-27
计算机系统应用(2021年11期)2022-01-06
山东交通科技(2020年1期)2020-07-24
电子技术与软件工程(2020年21期)2020-02-04
中国动物保健(2019年12期)2019-03-24
西南农业学报(2018年1期)2018-02-28
进出口经理人(2017年10期)2017-09-22
南方农业·下旬(2014年10期)2014-12-20
农家顾问(2014年5期)2014-06-26
