
清水混凝土外观质量图像采集影响因素与采集方式探究
2022-12-02 10:31喻圣慈李智明
中国建筑装饰装修 2022年21期
喻圣慈 翁 健 李智明 李 茂
清水混凝土是一次成型的作为装饰面的建筑表现形式[1]。清水混凝土外观质量,对建筑整体效果呈现产生直接影响。由于我国清水混凝土技术起步较晚,在研究水平与施工技术上相比国外有一定差距,大部分实际工程仍采用抹灰验收标准进行施工指导与验收,难以有效提升清水混凝土施工整体质量。本文分析清水混凝土外观质量图像采集影响因素,并探讨基于CNN 的图像采集分析方法,旨在为清水混凝土施工及验收提供有效分析方法。
1 清水混凝土外观质量图像采集影响因素
1.1 采集设备及其参数对清水混凝土外观质量图像采集的影响
在清水混凝土外观信息测量中,主要采用无人机、扫描仪等方式进行交叉对比进行分析。
无人机参数对清水混凝土外观质量图像采集的影响主要有以下5 点。
无人机摄制感光度的提升,图像传感器接收到的光纤增多,画面越亮;感光度过高或过低,都会在图像采集过程中,丢失清水混凝土外观质量信息,进而导致图像的色差降低,气孔、裂缝等特征减弱,使图像与真实情况的差异性较大。
无人机摄制快门时间增加,曝光时间延长,进光量会增多,画面越明亮。摄制快门时间短,适合拍摄运动状态下的问题;摄制快门时间长,适合拍摄静态物体[2]。在清水混凝土外观拍摄时,应精准控制摄制快门时间,快门时间过长或过短,都会导致图像与真实外观质量情况产生较大差异。
无人机摄制光圈值越大,则光圈孔径越小,景深会增大,对焦点前后的清洗范围增大,图像越暗[3]。受到天气等因素影响,无人机摄制光圈值会受到一定影响,导致清水混凝土外观质量信息丢失,甚至色差降低。
无人机摄制图像尺寸与采集面之间的间距是影响图像采集精度的重要因素。若清水混凝土外观质量图像采集精度要求为1 mm/pixel,则无人机摄制图像尺寸与采集面之间的距离应当控制在4 m以内[4]。
无人机摄制角度的越小,标定举行区域变形程度越大。在无人机图像采集过程中,应尽量保持在90°[5],避免摄制角度对图像精准度产生影响。
扫描仪参数对清水混凝土外观质量图像采集的影响主要有以下3 点。
扫描仪精度对清水混凝土表面气孔面积率、自比色差标准差等信息精准度的影响较小。随着扫描仪精度的提升,计算量明显提升,但测量值越接近人工测量值。
扫描仪扫描精度的提升会降低扫描的速度,若超出扫描限定速度,则扫描仪屏幕会给出相应提示。
扫描仪与采集面的高度为5 mm 左右时,扫描仪采集到的图像会出现与扫描方向垂直的光栅状纹路[6],进而对采集图像的精准性产生影响。同时,当外界光线进入扫描区域后,清水混凝土表面特征识别会受到限制。为保证图像采集的精准度,需要在保证表明平整度的基础上,保证扫描仪的滑轮与图像采集表面直接接触。
1.2 采集环境条件对清水混凝土外观质量图像采集的影响
清水混凝土外观质量图像采集过程中,采集环境对图像采集精准性产生的影响主要原因有以下5 点。
第一,根据既有研究结果、实践情况分析总结出,当温度在0℃~40℃,温度的变化对清水混凝土表面气孔面积率、设计色差标准差的影响较小。
第二,在无人机采集图像过程中,若风向垂直吹离图像采集面,则图像采集的精准性较高;若风向与图像采集面平行,则图像采集的精准性最差[7]。导致此问题的主要原因是无人机在图像采集过程中会自动对焦,快门时间受到风矢量在平行于采集面方向上的分量影响。为保证清水混凝土外观质量图像采集的精准性,需要保证采集工作在微风的情况下进行。
第三,照度的提升,清水混凝土表面气孔面积率、设计色差标准差等会逐渐提升,后趋于平稳或下降。因此,照度过大或过小,都会对清水混凝土外观质量分析的精准性产生不利影响。在具体实践中,应在5 000 ~20 000 Lux 的环境照度情况下进行图像采集[8]。
第四,在其他条件不变的情况下,光线照射角度对清水混凝土外观质量采集精准度产生的影响不明显。
第五,清水混凝土表面潮湿度不断增加的情况下,其表面气孔面积率、自比色差标准差呈现出先增大后减小的规律。为保证清水混凝土外观质量图像采集精准性,应尽量保证混凝土表面干燥,将表面潮湿度控制在5%以内[9]。
1.3 混凝土构件自身条件的影响
混凝土构件自身条件会对清水混凝土外观质量图像采集精准性产生直接影响,具体体现在以下3 个方面。
第一,曲面。曲面的曲率半径大于1时,扫描仪仍可以有效还原出平面图像,且不会受到外界光线的影响,可以有效保证图像采集的精准性[10]。若曲率半径较小或者曲率半径不均匀,则扫描仪难以进行有效扫描,且图像校正流程复杂,计算量较大,无法达到图像高质量应用的目的。
第二,当清水混凝土表面由多个平面构成不规则表面时,需要对每个平面进行单独取样,并通过选取均值的方式,确定分析评价的具体指标,之后的每一个局部平面采集方法相同。
第三,明缝等设计缝、对拉螺栓孔眼、预留孔洞等孔洞,对清水混凝土外观只来给你评价的影响主要是图像上显示的信息与混凝土本征颜色存在差异,若不排除其他影响,则对清水混凝土外观质量的分析及评价产生较大影响。
2 基于CNN 的图像采集分析方法
2.1 图像预处理
图像预处理包括几何校正、裁剪与拼接。几何校正过程中,需要对图像捕捉介质的平面、物体平面转角与倾斜角进行校正、针对摄像机本身原因导致的图像畸变进行校正、对电子扫描系统的失真情况进行校正、对物体本身平面平整性导致的图像畸变进行校正[11]。
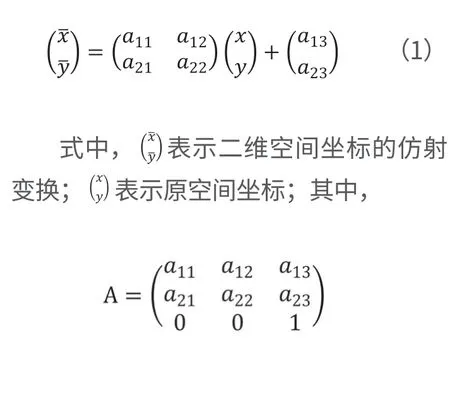
仿射变换、极坐标变换是图像校正中常用的数学模型。
二维空间坐标的仿射变换公式表示如下:
通过对原空间坐标的平移操作,得出平移过程的公式,表示为:
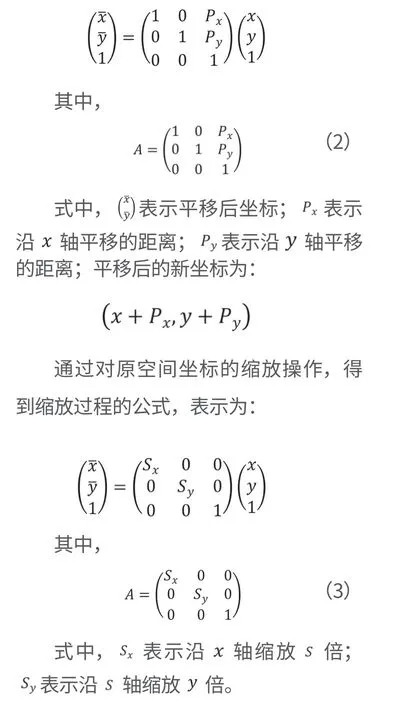
通过对原空间坐标的旋转操作,得出旋转过程的公式,表示为:
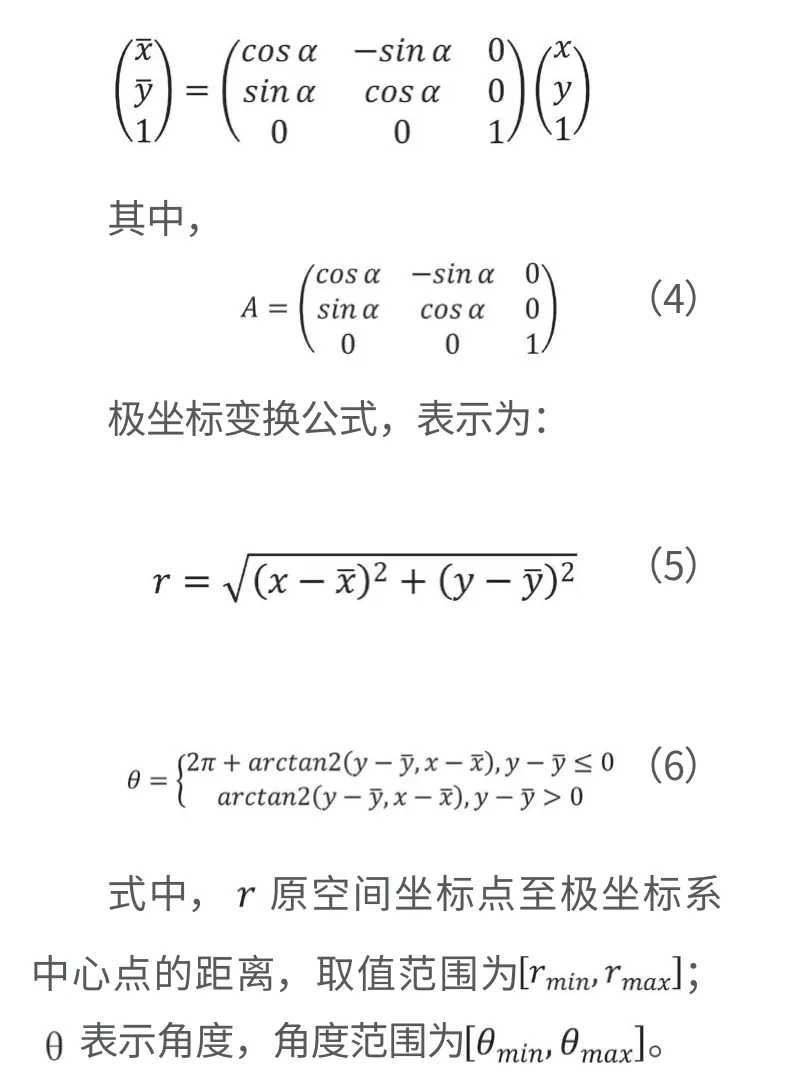
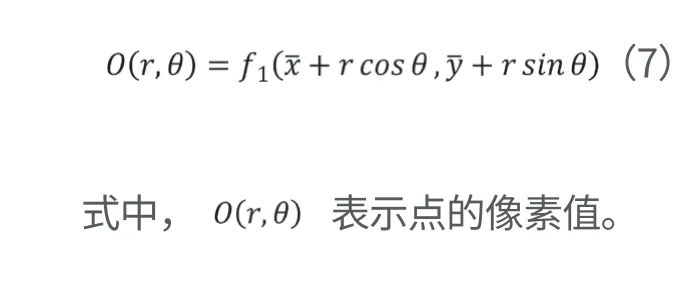
通过极坐标系对图像进行校正,可以在极坐标与笛卡尔坐标的对应关系上得到每个点的像素值,表示为:
2.2 数据库建立
为提升图像采集质量,建立包括无人机、轨道式大幅面扫描仪设备采集的图像的数据库。数据库数据包括无人机的图像采集尺寸、图像摄制的感光度、摄制图像时的快门时间与光圈值、无人机与采集物体表面之间的距离、图像采集的面积、扫描仪扫描进度等[12]。同时,对图像采集的温度、风向、照度、混凝土表面潮湿度、光线照射角度等参数变化情况,及混凝土本身的形状、颜色、强度等级等数据信息进行采集。
2.3 像素分析
考虑到清水混凝土外观质量图像采集的实际需求,提出一种基于CNN 的像素级别分割结构。在该结构应用过程中,需要先运行跳跃融合结构。在该结构中,原始图像通过多次卷积与池化操作[13],可以实现图像特征信息的扩大,并通过跳跃相加、特征融合,保证了图像整体信息与局部信息的平衡。
为将低分辨率特征图像还原为高分辨率图像,需要进行上采样处理。上采样处理过程红,采用线性插值法进行图像处理。
图1 为线性插值上采样示意图,线性插值法处理公式表示为:
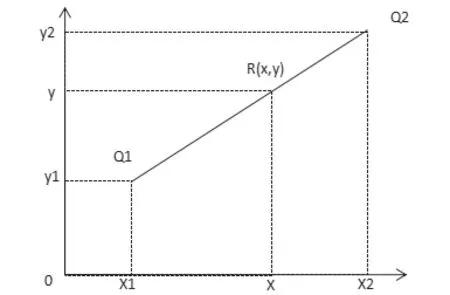
图1 线性插值上采样示意图(来源:作者自绘)

2.4 色差分析
传统清水混凝土的外观色差情况需要根据人眼观察得出。由于人眼色差辨别能力有限,所以提出计算机视觉的色差分析方法。基于既有研究成果分析,借助XYZ 色彩空间,对RGB 色彩进行转换[14]。转换公式表示为:

通过色彩转换,有效提升了图像的色彩差异分析效果,对图像质量提升及图像信息的精准应用提供支撑。
3 结语
清水混凝土外观质量图像采集受采集设备及其参数、采集环境条件、构件自身的因素影响,给混凝土外观质量分析带来一定困难。本文基于影响因素分析,提出了基于CNN 的图像分析法,可以对图像采集相关信息进行存储,并构建数据库,在图像像素、色彩转换等方面具有良好的应用效果。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
宝钢技术(2022年2期)2022-07-09
东华大学学报(自然科学版)(2021年1期)2021-04-01
国学(2020年1期)2020-06-29
雷达学报(2018年3期)2018-07-18
时代汽车(2018年6期)2018-06-28
时代汽车(2018年2期)2018-05-31
佛山陶瓷(2017年8期)2017-09-06
北京航空航天大学学报(2017年10期)2017-04-20
中国动物保健(2015年4期)2015-10-21
