
毒品原植物无人机巡检系统及执法应用
2022-12-01 07:58陈海涛张志学唐宝华朱红伟
中国人民警察大学学报 2022年12期
陈海涛,王 辉,张志学,唐宝华,朱红伟
中国人民警察大学,河北 廊坊 065000
0 引言
近年来,我国禁毒工作形势依然严峻[1],国内毒品原植物(如罂粟)违法种植现象屡禁不止。为从源头上控制毒品原植物违法种植活动的发生,公安机关将毒品原植物巡检执法作为一项重要工作落实[2],定期开展禁种铲毒“天目行动”。无人机因其具有机动灵活、视野范围广、操作便捷等特点,在公安禁毒铲毒工作中发挥着越来越重要的作用,已经成为当前禁毒执法工作的重要工具。但是,调查研究表明当前无人机在毒品原植物巡检中也有一些问题亟待解决。一是巡检执法智能化程度不高[3]。无人机巡检过程中,公安民警对采集的图像数据现场或返回单位后进行肉眼识别,这样的方式任务繁重且效率低下。二是巡检执法系统不完善。图像采集和识别不同时,不能实现巡查毒品原植物“即查、即辨”的效果,影响了执法处置时效性。在此背景下,本文设计了智能化、多端互通、高时效性的毒品原植物无人机巡检系统,形成了闭环执法,有效提高毒品原植物无人机巡检执法效率和警务实战应用水平。
1 毒品原植物无人机巡检系统设计
毒品原植物无人机巡检系统包括飞行平台、地面站、通信链路和缉毒巡检移动端四个模块(如图1所示)。
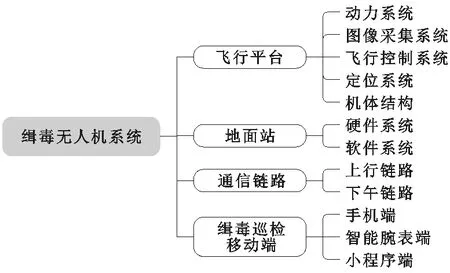
图1 毒品原植物无人机巡检系统组成
1.1 飞行平台
飞行平台由动力系统、图像采集系统、飞行控制系统、定位系统以及机体结构组成。图2为毒品原植物巡检无人机平台实物图。(1)动力系统由电机、电调、螺旋桨、电池组成,它为无人机飞行提供动力,将电能转化为机械能。(2)图像采集系统选用的主要部件是多光谱相机,该相机能够对复杂场景下的毒品原植物进行图像采集,具备刑事摄影技术所要求的多种拍摄方法,满足执法取证需求。(3)飞行控制系统由主控单元、惯性测量单元(IMU)、气压计、LED指示灯等模块组成。其主要功能:一是通过计算各路状态传感器传回的数据,实现飞机飞行过程中三轴姿态角和空间位置稳定;二是配合定位系统实现无人机航线规划、自主飞行、定点降落等功能。(4)定位系统由GPS模块和电子地图组成,是支持无人机安全飞行的重要技术条件,该系统能在发现目标时及时准确定位无人机位置,实现毒品原植物目标定位。(5)机体结构由机架、支臂、脚架组成,既是挂载相机的平台,同时也是其他部件安装的基础,其主要功能是将各模块连接成一个有机整体。

图2 毒品原植物巡检无人机平台实物图
1.2 地面站
地面站由硬件和软件系统组成。硬件系统需具备输入设备、输出设备、存储器、运算器和控制器,选用具备一定性能指标的笔记本电脑作为地面站硬件平台;软件系统采用基于JFinal[4]框架和.Net[5]开发平台的架构设计,图3为毒品原植物无人机巡检管理平台界面。

图3 毒品原植物无人机巡检管理平台界面
1.3 通信链路
通信链路包括上行链路和下行链路。上行链路主要完成地面站到无人机的遥控指令发送,下行链路主要完成无人机到地面站的图像采集信息数据的发送和接收。根据《无人机系统频率使用事宜》规定使用警用无人机频段,该频段能更好地满足警务应用信息传输需要。
1.4 移动终端
无人机巡检移动终端安装有相应APP程序软件,可以是手机或警务通等移动设备。移动终端整体采用模型—视图—控制器(MVC)的架构模式[6]。无人机识别的执法信息和现场情况能够通过移动终端即时共享给执法民警,确保了信息时效性,满足了及时出警的需求,是闭环执法体系中的重要组成部分。
2 人工智能识别软件系统构建
2.1 算法选择
随着以深度学习技术[7]为代表的人工智能识别技术[8]不断发展进步,该技术已经在人脸识别、智能监控等公安警务方面得到了广泛应用。分析发现:传统人脸识别技术算法多基于关键特征匹配,其泛化能力较弱;而在毒品原植物识别技术中,选用了泛化能力较强、智能识别准确度较高的Yolo作为识别训练算法。Redmond等人提出的Yolo作为一种基于深度学习的快速识别算法[9-11],摆脱了传统深度学习算法先生成预测框,再对应给出分类的弊端。该算法通过一个卷积神经网络结构就可以实现从输入图像到输出识别目标预测框的训练,并且实现了类别概率一步求解,大大提高了识别效率。该算法可以实现毒品原植物图像即时处理与视频播放,满足执法快速识别的要求。
2.2 网络模型
Yolov5目标检测网络共有 Yolov5m、Yolov5s、 Yolov5x 和 Yolov5l 四种权重模型,其各有特性且宽度和深度各不相同。本文选用深度和特征图宽度最小的Yolov5s网络,从而保证识别速度。由“width_multipe”和“depth_multiple”参数分别控制网络的宽度和深度。图4为Yolov5网络结构图,Yolov5网络结构由Input、Backbone、Neck、 Output 四部分组成。
Yolov5的输入端(Input),采用了Mosaic数据增强,自适应锚框计算和图片缩放技术。Mosaic数据增强技术可将四张图片进行随机缩放、剪裁和排布拼接并整合为一张,之后将这张整合的图片传入神经网络中训练,相当于传入了四张图片,可明显提升运行速度。自适应锚框计算技术可以对每一个数据集计算出最佳锚点框。自适应图片缩放技术可根据图片原始和输入到网络的尺寸计算缩放比例,进而确定缩放后图片的大小,该技术通过增加最少黑边到缩放之后的图片中以降低信息冗余度。Yolov5的网络主体部分(Backbone)是在不同图像细粒度上聚合并形成特征的卷积神经网络,主要由Focus和CSP两部分结构组成。其运行的主要思想是通过Slice操作对输入图片进行剪裁,降低计算瓶颈来增强CNN的学习能力,同时降低内存成本。Yolov5的网络融合部分(Neck)是一系列混合和组合图像特征的网络层,可将图像特征传递到预测层。Yolov5的输出端(Output)可对图像特征进行预测,最终生成边界框并预测类别。
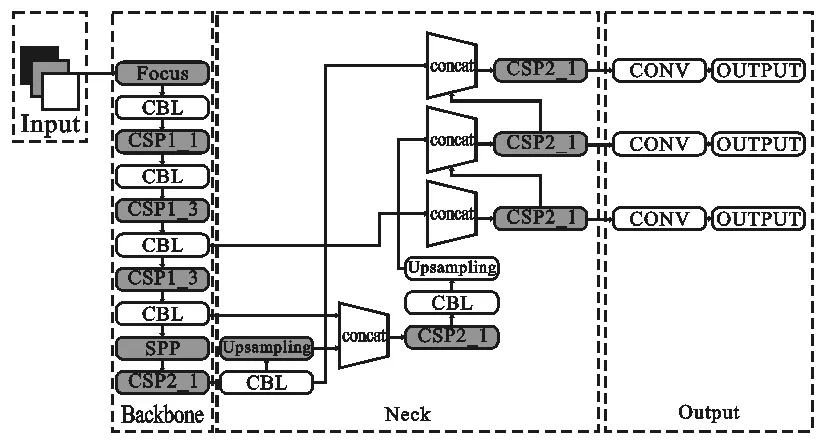
图4 Yolov5网络结构图
2.3 数据集制作
数据集在深度学习中占据重要地位,有着卷积神经网络训练与测试的双重作用,其好坏程度决定了毒品原植物识别成功率的高低。使用的训练样本是在多次巡查执法活动中采集的840张毒品原植物图片。按照数字的格式(narcotics)进行重命名并排序。通过随机数法选取采集的840张图片中的756张(90%)作为训练集,其余84张图片(10%)作为测试集。
2.4 数据集标注
数据只有通过数据标注才能让卷积神经网络知道这个物体是什么。使用标注软件对数据集以及毒品原植物球茎和花朵进行框选标注(图5所示),通过二者皆可实现毒品原植物智能识别。由于执法行动中获得了不同分辨率、饱和度、光照条件、拍摄角度、拍摄高度的样本,可提高不同场景的训练效果。最后,将标注好的图像信息保存为包括标注类型和像素坐标信息的.xml文件。
2.5 算法训练
搭载好Yolov5软件的运行环境后,将毒品原植物数据集的主要参数调整为:训练迭代次数设为450 000;单次训练所抓取的数据样本数量(batch-size)设为64,可实现每批训练64个样本;输入图片的像素大小设为416*416 。

图5 毒品原植物标注实例
然后,对毒品原植物现场无人机巡检获得图像中出现的目标及识别结果进行统计:将识别数与漏检数之和定义为合计数;准确率为识别正确数与合计数的比值,误报率为识别错误数与合计数的比值,漏报率为漏检数与合计数的比值。统计结果如下:罂粟花识别准确率为92%,误报率为5%,漏报率为3%;罂粟花蕾识别准确率为87%,误报率为8%,漏报率为5%。上述数据证明了经过该算法训练后智能识别准确率较好。图6为毒品原植物识别图。

图6 毒品原植物识别图
3 毒品原植物无人机执法流程
综上所述,毒品原植物无人机系巡检统实现了在无人机平台上,毒品原植物图像即时采集并传输至地面站进行智能识别处理且推送到执法终端的功能,形成了相对完善的毒品原植物即时处置的闭环执法路径,满足了即查即辨的要求,提高了执法效率。该闭环执法系统符合当前公安民警执法全流程记录的要求,建成了全面覆盖、有机衔接、闭环管理的执法记录链条,达到了执法活动全过程留痕且可回溯管理的目的。毒品原植物无人机系统在毒品原植物巡检执法中的应用流程,主要包括五个阶段:任务准备、飞行巡检、识别推送、证据固定、现场处置。
3.1 任务准备
民警在接到群众报警或者开展巡检任务后,应进行巡检区域现场勘查、检查无人机和确定飞行航线等准备工作,明确禁飞区范围和航线规划区障碍物限制高度等现场情况,为高效巡检做好前期准备。
3.2 飞行巡检
飞行前,检查无人机状态是否正常以及现场环境和气象情况是否满足飞行条件。若飞行条件具备,使用毒品原植物无人机巡检管理平台对飞行航线进行规划,完成后开始执行飞行任务。
3.3 识别推送
当检测到毒品原植物时,无人机巡检管理平台进行识别推送,将处置信息与坐标位置推送至执法民警缉毒巡检移动终端。民警可通过移动终端具备的拍照信息获取功能对毒品原植物信息进行拍照记录或回传,实现线上协作。
3.4 证据固定
若无人机发现毒品原植物,就将以导航定位模式在其上方进行定高定点停留,并回传采集的视频照片。即通过固定无人机机位,水平转动机身位置等拍摄方法将被拍摄客体分段连续拍摄为若干画面。同时,执法民警配合使用执法记录仪对现场的执法行为进行客观、全面的记录。
3.5 现场处置
执法民警手动铲除违法种植毒品原植物后,通过缉毒巡检APP将处置结果上传至巡检管理平台,完成整个执法作业流程。
当前,公安机关推行“情指行”一体化实战化运行机制,强调智能警务模式,注重信息化手段运用。在缉毒执法工作中,依托毒品原植物无人机巡检系统,可实现智能化执法处置。同时,巡检执法信息可传输至公安指挥中心,通过业务协同、数据融合,搭建起业务、数据、人员三位一体的运行管理机制,建立执法全要素管理的新体系。在缉毒执法过程中,缉毒无人机系统的执法信息融入公安指挥中心,可为上级部门执法行动决策提供依据,有助于违法种植毒品原植物巡检执法的监督管理,体现了智能警务实战化的特点。该体系的构建对于规范执法活动,提高办案效率,保障民警更好地依法履行职责,维护人民群众的合法权益也具有重大意义。
4 结语
本文以毒品原植物违法种植巡检执法工作为研究对象,基于毒品原植物无人机巡检过程中存在的智能化水平低、执法效率低的现状,提出并构建了毒品原植物无人机巡检系统。该系统采用基于Yolov5的深度学习智能识别系统,将无人机技术、人工智能识别技术、全球定位技术、刑事影像技术、智能证据采集技术、移动通信网络技术等融合在一起,实现了一键任务规划、导航定位、识别判断违法种植毒品原植物、自动取证、信息推送并处置的功能,构建了民警与无人机协同作业体系,实现了智能化巡检违法种植毒品原植物,并具备主动上报作战指挥中心和推送公安民警的功能,有效解决了当前无人机执法中存在的问题,提高了公安民警执法效率,实现了警用无人机智能化应用程度提升。
猜你喜欢
环球时报(2022-12-19)2022-12-19
共产党员(辽宁)(2021年12期)2021-07-04
作文小学中年级(2020年6期)2020-07-24
南方周末(2019-06-27)2019-06-27
红领巾·萌芽(2017年5期)2017-06-23
爆笑show(2016年7期)2017-02-09
少儿科学周刊·儿童版(2015年10期)2015-11-07
红领巾·萌芽(2015年9期)2015-09-10
少儿科学周刊·儿童版(2015年1期)2015-07-07
自然资源遥感(2014年3期)2014-02-27
