
SAR影像变化检测的前景特征流形排序法
2022-11-29 13:06罗卿莉崔峰志魏钜杰
测绘学报 2022年11期
罗卿莉,崔峰志,魏钜杰,明 磊
1. 天津大学精密测试技术及仪器国家重点实验室,天津 300072; 2. 中国测绘科学研究院,北京 100036; 3. 中国船舶工业系统工程研究院,北京 100094
合成孔径雷达(synthetic aperture radar,SAR)是一种主动微波成像遥感技术,具有全天时、全天候等优势。SAR影像变化检测是遥感领域的研究热点,在农业作物分析[1]、城市扩张分析[2]、地质灾害定位和损害评估[3]等领域中得到了广泛应用。
SAR影像变化检测可分为差异图构造、差异图分析和变化检测结果图生成3个步骤,其中差异图构造和差异图分析是研究的重点。在差异图构造前可以对影像进行包括图像配准和辐射校正等预处理操作。其目的是使不同时相的SAR影像在空间域和光谱域具有一致可比性[4]。差异图构造是为了对变化类和未变化类进行初步区分,为后续的差异图分析提供基础。最简单的差异图构造方法是基于像素相似性得到差异图。文献[5]提出变化向量分析方法,通过变化向量的大小和方向来判断是否发生变化以及确定变化类型。文献[6]提出利用对数比算子构造差异图,将乘性噪声转变为加性噪声,能够克服差值算子的缺点,但并未考虑领域信息。之后的学者们对加入邻域信息改进差异图构造算法进行了研究。文献[7]提出考虑邻域信息如均值、方差等通过加权赋值来构造比值差异图,对单独出现的噪点具有一定的抑制作用。文献[8]提出的组合差异图(combined difference image,CDI)方法是对差值比和对数比算子进行加权融合。文献[9]利用小波变换进行不同比算子的高频和低频融合进行差异图构造,提高了检测性能。文献[10]提出基于直接估计分布函数比值的方法提高了检测精度。文献[11]利用纹理差异与超像素分割信息融合构造了差异图,得到了较好的试验结果。文献[12]提出将灰度差异图和纹理差异图进行融合的方法,在提取变化信息的同时抑制了噪声的影响。文献[13]提出一种邻域对数比算子和单像素对数比算子相乘来构造差异图的方法,可以增强变化类与未变化类之间的差异,具有较好的抗噪能力,但该方法仍存在将区域内的部分变化区域误分为未变化区域的问题。
差异图分析方法中最简单的是阈值法,包括KI阈值算法[14]和期望最大化(expectation maximization,EM)算法[15]。阈值法计算较为简单,但是存在精度受限的问题。无监督聚类法包括K均值(K-means,KM)聚类[16]和模糊C均值(fuzzy C-means,FCM)聚类[17]等。其思想都是通过增大类间距离,减小类内距离来实现的。许多学者针对传统的阈值法和聚类法进行改进,文献[18]提出利用双模态校验,采用基于广义高斯模型的KI阈值算法来确定最佳阈值。文献[19]将局部拟合和EM算法相结合用于SAR变化检测。文献[20]提出改进的FCM聚类算法,利用带附加项的MRF能量函数修正每个像素的隶属度来降低散斑噪声的影响。文献[21]提出一种基于直方图相似性测度的变化检测方法,可以提高变化检测的精度,但是该方法未有效利用纹理信息,仅利用光谱信息可能会导致错误判别。文献[22—23]利用主成分分析(PCA)与小波变换结合或利用字典学习与稀疏表示理论进行变化检测,该类方法具有一定的稳健性。然而基于上述差异图分析方法易受噪声影响或需要先验概率模型等不足,因此,文献[24—25]提出了流行排序(manifold ranking,MR)的概念与数学模型,其核心思想为根据大量数据揭示的本质流形结构进行排序,并利用一种半监督的分类函数用来表示标记点和未标记点之间的相关性。文献[26]将流行排序算法引入到图像的显著性检测,即根据待检测区域与前景或背景线索的相似性进行排序,但该方法过度依赖边界背景特征的选择。将流行排序算法引入SAR影像变化检测中。文献[28]提出结合边界连通性和前景连通性先验进行流形排序的显著性检测。文献[29]提出将流行排序与边界扩展、角聚类融合获得更准确、更平滑的显著性映射。
随着机器学习理论的深入发展,利用卷积神经网络(convolutional neural networks,CNN)进行SAR影像变化检测是国内外研究的热点。文献[30]利用堆叠式压缩自编码器(stacked contractive autoencoder,sCAE)从超像素块中提取特征并进行变化检测分析。文献[31]提出改进的深层CNN网络结构,改善了卷积神经网络所需参数庞大而SAR数据集不足的问题。针对SAR图像源数据是相干复数的特点,文献[32]利用复数深度网络在训练时学习到图像间的相关性来提升检测效果。为提高精度水平以及充分利用多源数据,文献[33]提出一种基于多光谱、高光谱和SAR等多种数据源的端到端检测网络。有监督的深度学习方法通常需要大量的标记样本。针对SAR影像的标记样本获取困难的问题,文献[34]提出一种利用自监督表示学习的变化检测方法,模仿生成式对抗网络的判别器。文献[35]在SAR影像变化检测中利用瓶颈层代替普通卷积层,并引入非对称卷积和空洞卷积,减少模型的运算量和空间复杂度。文献[36]提出利用多尺度池化核充分提取变化信息的空间上下文信息,在保证训练精度的同时减少训练和测试的时间。还有一类是分类后比较法,通常采用传统方法或结合深度学习提取特征对不同时相的影像分别进行分类后再做比较。文献[37]提出了一种基于卷积神经网络的SAR影像检测方法。这种方法的检测精度受限于前后时相SAR影像的分类精度,会存在误差累积。总体而言,利用深度学习进行变化检测需要求解的参数较多,构造的网络模型较为复杂,受训练样本的质量影响较大[38]。
现有基于差异图分析的变化检测方法均能较好地实现SAR影像的变化检测,但仍然存在两个主要问题:①变化区域内存在误检测的问题;②基于流行排序的变化检测算法中使用的中心先验假设不适用于变化区域位于SAR影像边界区域的检测。为了克服上述缺陷,本文设计一种超像素分割和前景特征流行排序的SAR影像变化检测方法(a method of manifold ranking based on superpixel segmentation and foreground features for change detection, MRSFCD)。算法通过基于单像素和邻域对数比算子进行加权融合构造差异图,在保持变化区域内部的一致性的同时抑制噪声干扰,然后改进无向图连接方式,不对四周边界的超像素进行连接,利用超像素分割结果和灰度信息进行三次邻接,基于前景特征进行流行排序得到显著性图,避免了背景特征的选择,提高了SAR影像边界变化区域的检测精度。
1 MRSFCD变化检测算法流程
本文设计的超像素分割和前景特征流行排序的SAR影像变化检测方法(MRSFCD)主要包括以下4部分:①滤波预处理,利用增强Lee滤波对不同时相的SAR影像进行处理。②差异图构造,通过邻域对数比和单像素对数比加权融合进行差异图构造。③超像素分割和流行排序,对差异图进行超像素分割,然后改进超像素的无向图的连接方式,不对边界四周的超像素进行连接,利用超像素分割结果和灰度信息进行三次邻接。将基于前景特征流行排序后得到的显著性图与单像素对数差异图进行点乘。④阈值分割,利用OTSU阈值分割方法得到最终的变化检测二值图。算法的总体流程如图1所示。对于目标区域不同时刻获取的两幅SAR影像,令校正和配准后的两幅SAR影像分别为X1和X2。利用MRSFCD算法,可以得到变化检测结果图,分为变化类和未变化类两大类。
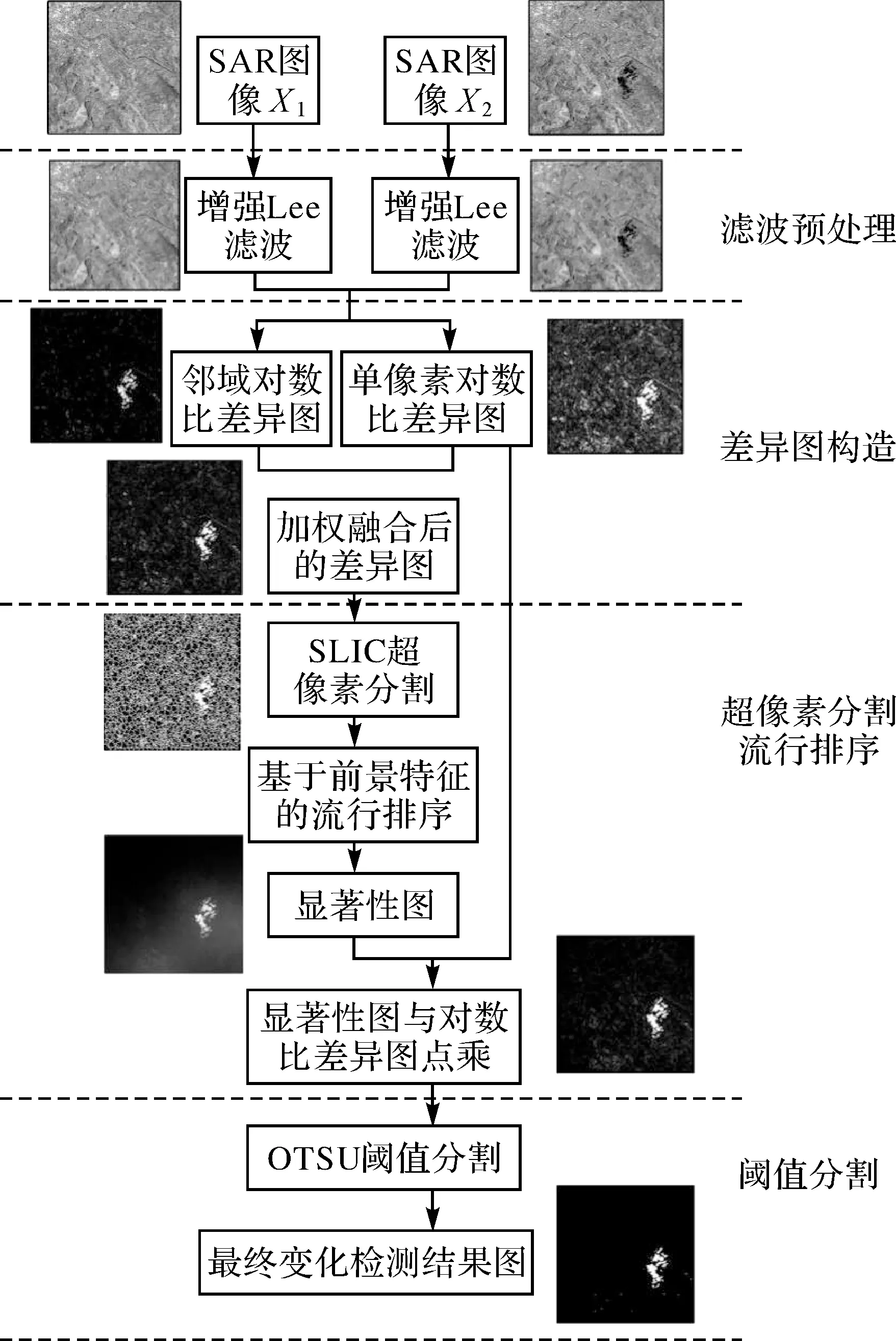
图1 MRSFCD变化检测技术框架的基本流程Fig.1 Flowchart of the MRSFCD change-detection method
1.1 差异图构造
SAR影像变化检测的精度受影像的相干斑噪声影响较为严重。SAR的后向散射机理较为复杂,其存在透视收缩、叠掩现象和雷达阴影等几何失真,以及包括SAR影像的斑点噪声和多次反射图像等问题。各种地物的表面粗糙度等特性以及介电常数、角反射器效应、极化方式等都会影响成像结果。本文方法主要考虑了斑点噪声的影响,该方法是建立在将相干斑噪声简化为乘性噪声模型基础上的。在SAR成像过程中,分辨单元内散射体不满足中心极限定理时,图像噪声模型估计为乘性噪声,即I=X·Y,其中I为观测图像,X为地面实际反射图像,Y为噪声分量,其中X和Y互不相关。
本文首先采用增强Lee滤波[39]进行预处理得到滤波后的影像。随后利用对去除乘性噪声效果较好的单像素对数比算子及邻域对数比算子分别计算差异图,对两个差异图进行加权融合,构造最终的差异图。该算法不仅保持了变化区域内部的一致性,同时减少了乘性噪声的干扰。
邻域对数差异图的构造利用了文献[13]提出的邻域对数比值算子。设邻域对数比值算子为D1,其计算公式如式(1)所示,其中邻域为8邻域
(1)
式中,Ωι,j是像素(i,j)的邻域;X1(m,n)和X2(m,n)分别是前后时相影像邻域窗口内的像素灰度值。单像素对数差异图的构造利用单像素对数比算子D2进行计算
D2(i,j)=|ln(X1(i,j)+1)-ln(X2(i,j)+1)|=
(2)
式中,X1(i,j)和X2(i,j)分别为前后时相影像对应像素的灰度值,对其数值进行加1操作,是为了避免了灰度值为0而无法计算的情况。将D1与D2进行加权融合,得到最终的比算子为
D(i,j)=ρ×D1(i,j)+(1-ρ)×D2(i,j)
(3)
式中,ρ为融合加权系数,其确定规则如式(4)所示
(4)
1.2 超像素分割和流行排序
本文设计了一种结合超像素分割和前景特征流行排序的差异图分析方法,该方法提高了SAR影像边缘区域的变化检测精度。方法首先对差异图进行超像素分割,然后基于改进的无向图对超像素进行连接和基于前景特征的流行排序,排序后得到的显著性图和基于单像素对数比的差异图进行点乘,得到变化检测结果图。对该结果图进行阈值分割,可以得到最终的变化检测结果图。
1.2.1 超像素分割
在差异图分析过程中,首先对加权融合后的差异图进行了超像素分割,使用的是简单线性迭代(simple linear iterative clustering,SLIC)算法。本文利用SLIC对构造得到的差异图超像素分割。其原理是将灰度值以及像素坐标进行记录,每个点对应一个三维向量,然后对三维特征向量构造距离度量标准,通过距离度量对图像进行超像素分割。超像素分割时认为相邻像素隶属于同一个超像素,令它们有相同的标记。
首先对差异图设置初始化的聚类中心向量Mk=[lk,xk,yk]T,lk为第k个聚类中心灰度值,(xk,yk)为其位置坐标,并使聚类中心采用正六边形的分布,即令聚类中心采样间距为W,更利于邻接的稳定性和平衡性,W定义如式(5)所示
(5)
式中,P为图像像素总数;K为设置的超像素数。距离度量D如式(6)所示
(6)
其定义是计算每个聚类中心像素与迭代搜索区域为2W×2W邻域范围内的每个像素(i,j)之间的距离。其中i和j分别为灰度值为X(i,j)的像素的位置坐标,p是聚类总数,β是调整颜色距离和空间距离权重的参数[11]。参数β是试验中的超参数,取值范围为5~40。若β取值较小则超像素边界更贴近像斑实际边界,反之超像素边界越规则。每次的迭代结果是将每个像素与距离最近的聚类中心k相关联。迭代完成后将像素标签赋值为k,然后重新计算聚类中心。对上述过程迭代10次停止即可满足需要。
1.2.2 基于前景特征的流行排序
利用流行排序进行显著性检测的方法在变化检测中是用于检测差异图中的变化区域。传统利用流行排序进行变化检测方法是基于中心先验假设的。该假设认为检测的目标是位于图像靠近中间的区域,默认背景位于图像边界处。基于该假设发展的方法不适用于变化区域位于SAR影像边缘部分的检测。因此,为了提高SAR影像边缘区域的变化检测精度,本文设计了一种结合超像素和前景特征的流行排序方法。该方法改进了无向图构造方式,利用超像素分割结果的灰度信息进行三次邻接的无向图构造,并基于前景特征进行流行排序,得到显著性图,与单像素对数差异图点乘从而标记变化区域。该方法的主要步骤如下所述。
(1) 构造超像素分割的无向图。本文在超像素分割的基础上构造了无向图,参考文献[26]提出的方法(图2(a)),在其基础上进行了改进(图2(b))。文献[26]方法将每个节点与邻接节点以及与邻接节点共享边界的节点相连接,并强制连接四周边界节点构成闭环图,为减少中心先验假设对变化检测结果的影响并考虑灰度信息,本文在文献[26]方法的基础上不对四周边界的超像素进行连接,并考虑了超像素的灰度信息进行连接。在进行流行排序时,遵照以下两个基本假设:①每个超像素与附近的超像素可能具有同样的标记;②同一结构上的超像素点往往具有一样的标记[25]。
本文利用超像素分割结果构造了三次邻接的无向图,记作G=(V,E)。其中,V和E分别为一组节点和无向边。无向图构造示意图如图2所示。各个不规则分块表示超像素分割的结果,其中,用灰色和白色区域表示超像素均值的差别大于阈值φ的两类区域。本文对利用超像素分割的结果进行三次邻接的无向图构造进行说明,以超像素节点i(中心区域的红色节点)为例。超像素节点是超像素的中心点。图上还有3种颜色的超像素节点,分别为第1次连接的绿色节点j,第2次连接的蓝色节点k,以及第3次连接的橙色节点m。第1步:将超像素节点i连接到与其相邻的超像素节点j(绿色节点),作为第1次连接,形成绿色边;第2步:将节点i连接到节点k(蓝色节点)上,作为第2次连接,形成蓝色边,其中节点i与节点j共享边界并且灰度均值相近(即它们的灰度值的差值小于阈值φ,可取5~10;第3步:将节点i连接到节点m(橙色节点),作为第3次连接,形成橙色边,其中节点i与节点k共享边界并且灰度均值相近。对每个超像素节点按上述步骤进行连接可得到每个节点的无向图。
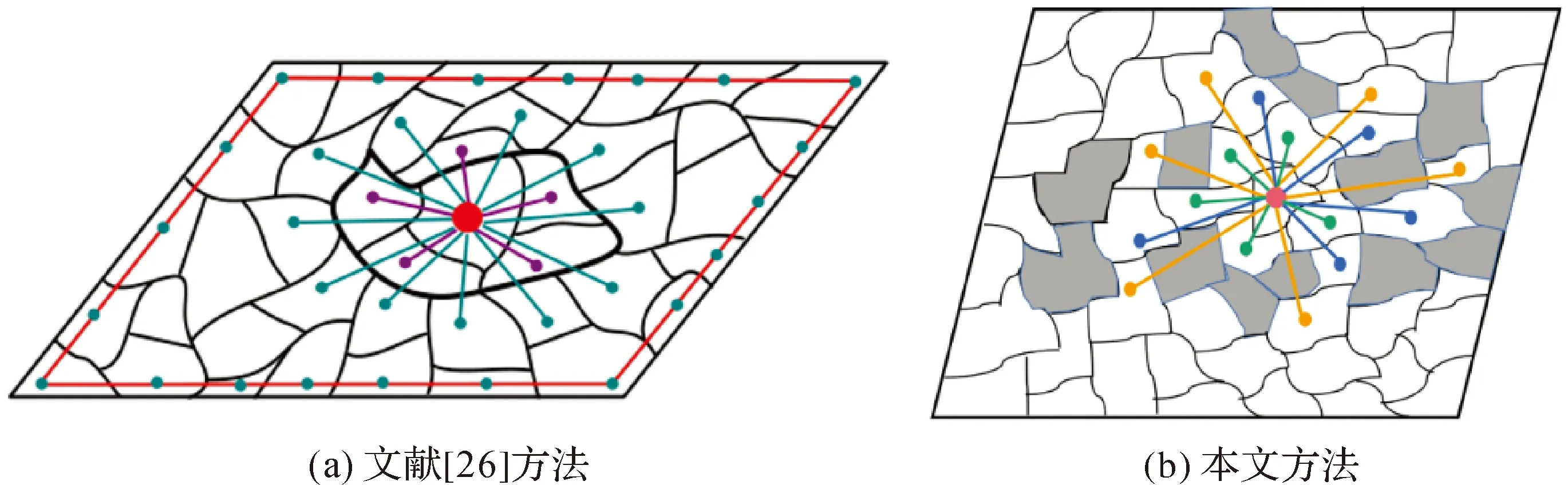
图2 无向图构造示意Fig.2 Undirected graph construction
(2) 计算邻接节点权重。无向图构造完成后,计算两个超像素节点之间边的权重表示如式(7)所示
(7)
(3) 流行排序。通过无向图的构造和邻接节点权重计算,本文得到了关联矩阵W和度矩阵D,利用流行排序计算模型可以获得流行排序的稳定解,即显著性值。其稳定解将用于之后的流行排序计算。每个超像素节点作为给定的数据集元素X={x1,x2,…xi,xi+1,xi+2,…xn},将部分特征节点标记为查询点。设y=[y1,y2,…,yn]T为指示向量。若xi被标记为查询点则yi为1,否则为0。其余数据点根据他们与查询点的相关性做排序即得到最终各个超像素节点的显著性值。令f:X→Rn表示排序函数,f可以视为[f1,f2,…fn]T,可通过以下正则化框架计算最终排序稳定解[24]。其代价函数如式(8)所示
(8)
式中,μ控制均匀度约束(第1项)和初始化约束(第2项)的平衡,后一项为正则项。最终排序函数如式(9)所示
f*=(I-αS)-1y
(9)
式中,I是单位矩阵;α=1/(1+μ);S是标准归一化Laplace矩阵,其表达式为
(10)
若对于二分类问题,对式(9)进行改写
f*=(D-αW)-1y
(11)
在利用式(9)或者式(11)计算排序结果时,(I-αS)-1或(D-αW)-1的对角线元素应设置为0,避免出现自增强的情况。
在利用式(11)进行流行排序时,首先设定阈值确定初始查询点。如式(12)所示
(12)
式中,Cmean表示差异图所有超像素灰度值的均值;n为超像素数量;ci为第i个超像素的所有像素点的灰度均值。提取灰度值大于2×Cmean的超像素作为前景特征检测初始查询点y,并进行流行排序。其中f*为最终排序结果即显著性值,再将显著值f*分配到超像素内的每个像素即可得到显著性图。显著性图增强了变化区域并弱化了未变化区域,但是存在强化了变化区域的部分边界的问题,在后续进行阈值分割时可能会导致误检。为了避免上述问题,本文将单像素对数差异图和显著性图进行点乘运算得到了结果图。这样结合了单像素对数差异图能够较好地保持变化的边界和显著性图能够抑制未变化区域噪声的优势,最终能够得到较好的检测结果。最后对结果图利用OTSU阈值处理[40]得到二值变化检测结果图。
2 试验结果与分析
2.1 试验数据
为了对算法进行性能测试,本文选取了覆盖匀质区域、异质区域的3组试验数据进行了试验,数据均为SAR影像的强度数据。第1组数据为分别于1999年4月和1999年5月通过卫星ERS-2获取的瑞士Bern地区火灾前后的SAR图像,极化方式为VV极化,图像尺寸均为301×301像素。第2组数据为分别于2008年6月和2009年6月通过卫星Radarsat-2获得的黄河入海口农田地区的SAR影像,图像尺寸均为291×306像素。第3组数据为分别于2014年1月和2015年2月通过卫星TerraSAR-X获得的北京地区影像,极化方式为HH极化。影像尺寸均为605×596像素。该影像覆盖区域高楼林立,呈现极不均匀的特性。3组SAR影像及其变化参考图如图3所示。
2.2 评价指标
为了定量评价本文方法性能,采用假阳性(false positive,FP)、假阴性(false negative,FN)、真阳性(true positive,TP)、真阴性(true negative,TN)[9]、总体错误数(overall errors,OE)、正确分类率(percentage correctly classified,PCC)和Kappa系数作为评价指标。PCC表示为
(13)
式中,FP为错误分类为变化类的像素数;FN为错误分类为未变化类的像素数;TP和TN分别是被正确分类为变化类和未变化类的像素数;OE被定义为FN和FP的总和。

图3 3组SAR影像及变化参考图Fig.3 Three SAR image datasets and their reference images
Kappa系数用于评估检测结果与参考结果的一致性,定义为
(14)
式中,PRE为一个预期比例,定义为
(15)
式中,Nc和Nu为参考图像中属于变化类和未变化类的像素个数,分别等于TP+FN、TN+FP。
2.3 MRSFCD算法参数分析
在MRSFCD变化检测算法中,主要有两个参数会影响变化检测结果精度,分别是流行排序中的参数α和用于计算邻接超像素节点权重的参数σ。本节在Bern和黄河地区数据集上对这两个参数进行了分析,测试了它们不同的取值情况对检测结果评估指标的影响情况,用于确定参数α和σ的最优值。
在两组SAR影像数据中,参数α对总体误差OE的影响如图4(a)—图4(c)所示。其他参数的设置情况为:超像素分割数量和计算超像素节点权重时的参数σ设置为1000和5。综合两组数据集的表现,在α为0.9~0.94时,两组数据集的总体误差OE较小,并且此时FN、FP较为平衡。因此,在后续试验中,α可以设置在0.9~0.94之间。对于Bern和黄河地区,初始化提取到的显著超像素块中存在的噪声较多。由于α=1/(1+μ),如果参数α设置在0.9附近,则μ较小。上述设置可减小初始排序对最终结果的影响,使得总体误差OE较小。
参数σ对评估结果的影响如图4(d)和(e)所示。其他参数α设为0.9,超像素分割初始数量设为1000。可以看出,当选择参数σ为5时,附近的OE存在极小值,并且Kappa系数较高。Kappa系数在σ较大时一直保持较高,这可能是由于变化类和未变化类之间存在样本不均衡,因此影响了Kappa系数对检测结果的评价。综上分析,在3组试验数据集上均采用超参α=0.9,σ=5进行试验来得到相关指标结果,将在Bern和黄河地区数据集上获取的超参数设置应用到北京地区的数据集上也可体现本文方法的泛化性。
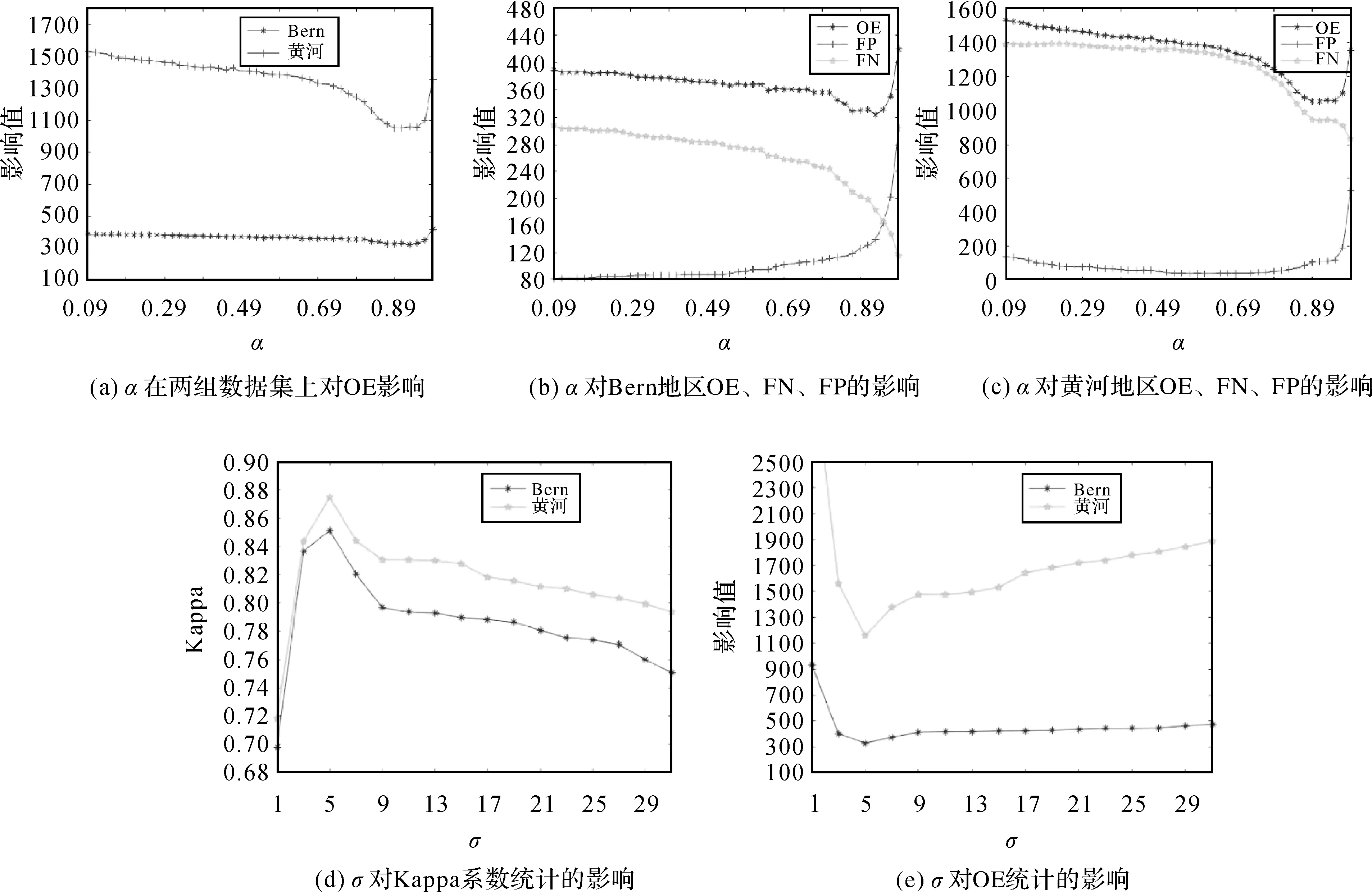
图4 参数α和σ对评估结果的影响Fig.4 The evaluation results of different parameters α and σ
2.4 差异图对比试验
在3组数据集上分别进行滤波预处理后利用邻域对数比算子和单像素对数比算子以及点乘融合、加权融合二者得到的差异如图5所示。结果显示,单像素对数比差异图检测到的变化区域内部具有良好的一致性,但受到较多噪声影响。邻域对数比差异图可有效地去除噪声,但其变化区域内的部分区域存在被误分为未变化区域的问题,形成了变化区域内的“空洞现象”,没有很好地保持其变化区域的整体一致性。
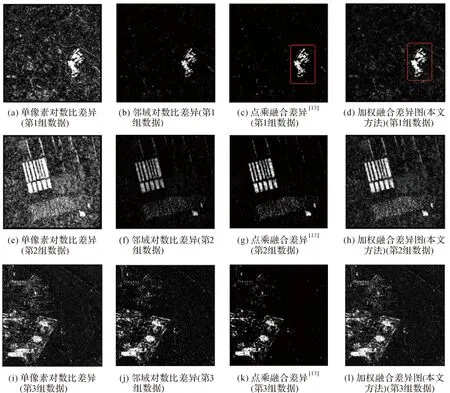
图5 3组数据集上的差异构造Fig.5 The difference images construction of three datasets
图6(a)和(b)分别为图5(c)和(d)的红色方框区域的放大图,对比展示了点乘融合差异图(图6(a))和加权融合差异(图6(b))的区别。利用本文方法得到的结果是图6(b)。与点乘融合差异图相比较,本文方法能够在减少噪声干扰的情况下保持检测的变化区域内部的一致性,避免了较多“空洞”的产生,如图6(a)和(b)蓝色方框内对应区域。虽然后者检测得到的未变化区域的噪声相对前者较多,但在后续处理中可通过其他方法有效地减少未变化区域的噪声。其中,Bern和黄河地区的数据较为均匀,故构造加权差异图时融合系数ρ选择0.7进行处理。北京地区TerraSAR-X影像具有不均匀性,在构造加权差异图时融合系数ρ选择0.3进行处理。
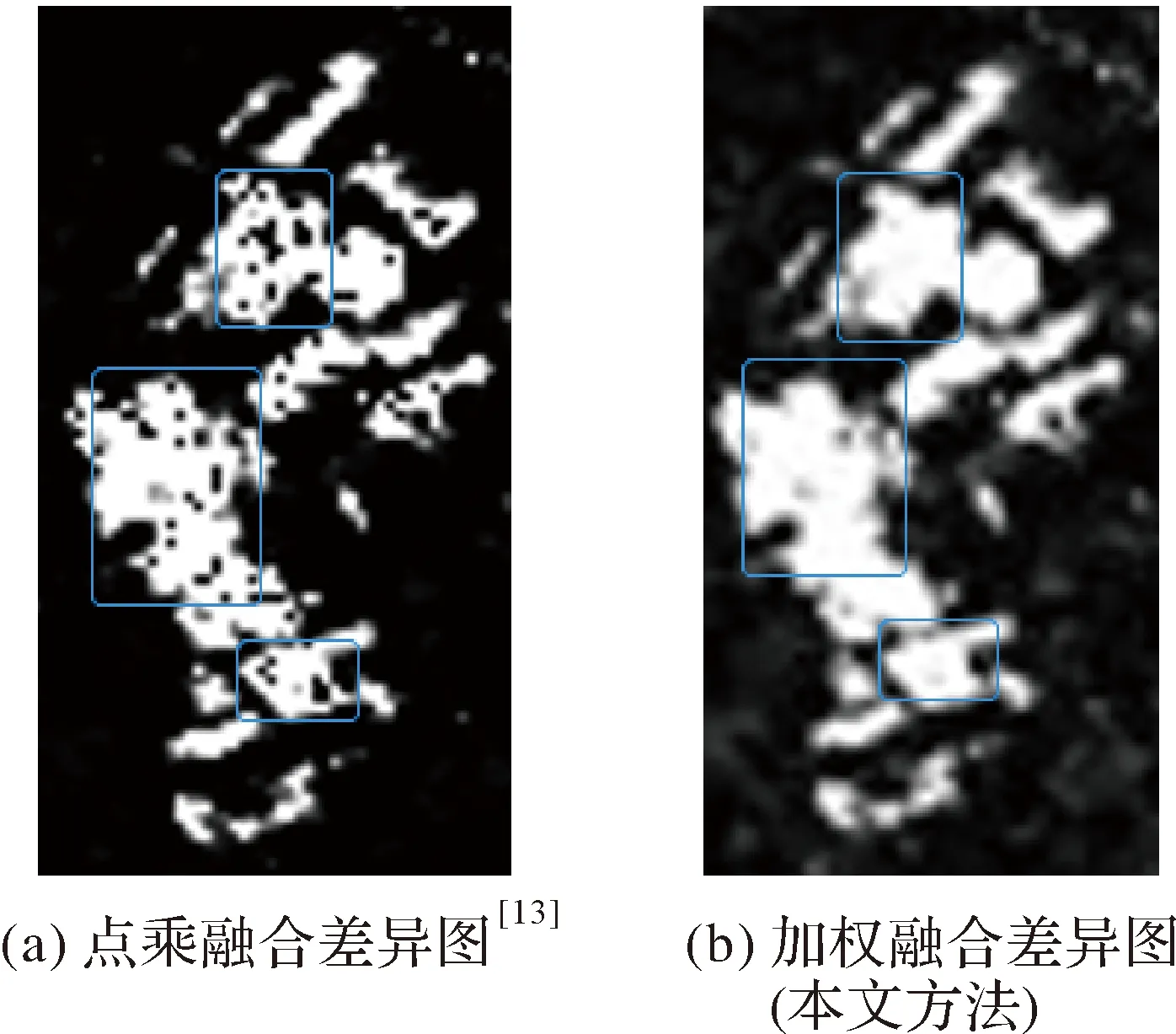
图6 差异图的构造放大图Fig.6 The difference images construction
2.5 边缘区域变化检测试验
为验证本文设计的结合超像素和前景特征的流行排序的方法可以有效地去除中心先验假设,从而提高SAR影像边缘部分的变化检测精度,本文以Bern地区的SAR影像为例进行了边缘变化检测试验。首先对前后时相的SAR影像进行裁剪,使得变化区域位于影像的边缘。然后分别应用基于中心先验假设的变化检测方法[26]和本文方法分别进行变化检测试验,其结果分别如图7(c)和(d)所示。在变化检测中,所有的SAR影像均未进行滤波预处理,两种方法均利用显著性排序图与单像素对数差异图进行点乘得到最终结果。图7(c)表明了基于中心先验的检测结果中间区域受噪声影响较大,在真实情况下,这部分属于未变化区域。图7(d)表明了本文方法可以明显提高影像边缘区域的变化检测精度,有效地抑制了未变化区域的噪声。
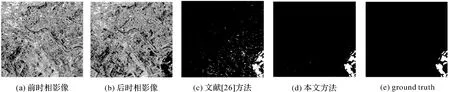
图7 边缘变化检测试验结果Fig.7 The change detection near the edge
2.6 试验结果与分析
采用4种变化检测方法对3组数据集进行检测,检测结果如图8所示。其他3种变化检测方法分别是对数比算子结合FCM聚类的算法(LF算法)、基于改进的对数比算子和直方图统计的算法[13](LH算法)、结合差分图像和K-means聚类的算法[41](CDI-K算法)。其中LF算法即构造对数比算子差异图,再利用FCM聚类分析得到变化检测图。LH算法即利用邻域对数比算子和像素级对数比算子相结合构造差异图,再利用直方图统计把第1个相邻灰度值像素数比值作为阈值进行处理。CDI-K算法将差分图像和对数差分图像融合,再利用K-means分析。4种算法均采用改进的增强型Lee滤波进行SAR影像预处理,如图8所示。其中白色表示变化,黑色表示未变化。3个数据集的定量评价分别见表1、表2、表3。
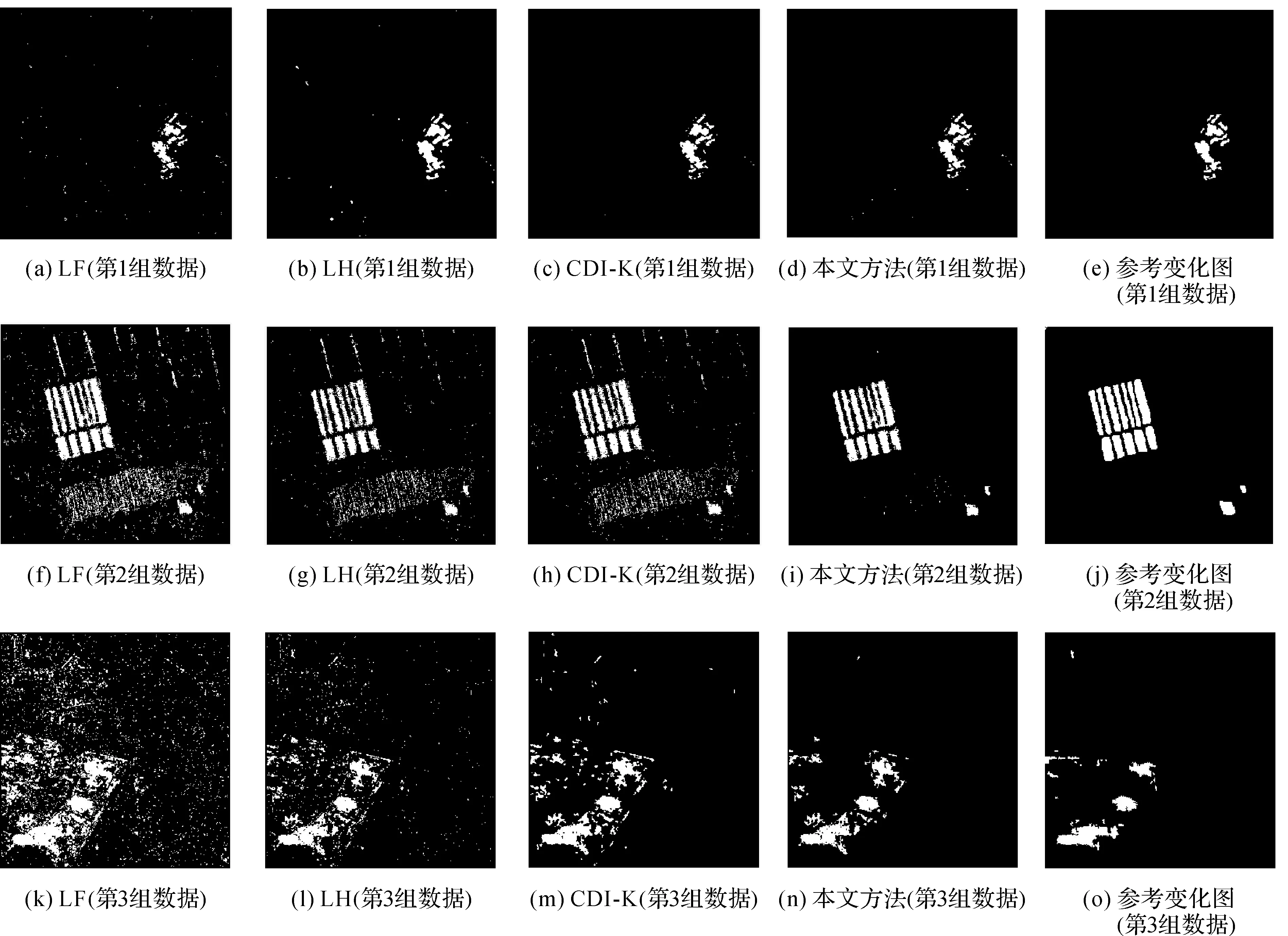
图8 3组数据集的检测结果Fig.8 The detection results of three datasets
由图8可以看出,本文方法检测得到的结果最接近真实标注图,可以有效抑制噪声对变化区域检测的影响,减少了孤立点,例如在第2组数据集上,LF、LH、CDI-K算法明显不能很好抑制由于噪声造成的伪变化,尤其图像底部区域受噪声影响较为严重,利用本文方法可以将这部分区域作为非显著性区域检测为未变化区域来尽可能抑制噪声的影响,而利用其他算法进行检测对于该区域噪声抑制效果不明显,从而出现了大面积的虚警。并且利用本文方法可以较好地保持变化区域内部的一致性,在视觉效果上优于其他算法。
由表1—表3可知,针对3组数据集,本文方法在OE、PCC、Kappa系数指标上均优于其他方法,相比于LF、LH和CDI-K算法,针对Bern地区数据集上,本文方法在Kappa系数指标上分别提升了0.067 7、0.034 9和0.110 6;针对黄河地区数据集,本文方法在Kappa系数指标上分别提升了0.235 5、0.168 3和0.173 1;针对北京地区数据集,本文方法在Kappa系数指标上分别提升了0.035 6、0.110 4和0.266 9。定量结果与图8所示的定性分析结果一致,综上可知,本文方法与其他方法相比具有一定优越性。

表1 Bern地区数据集的变化检测评价
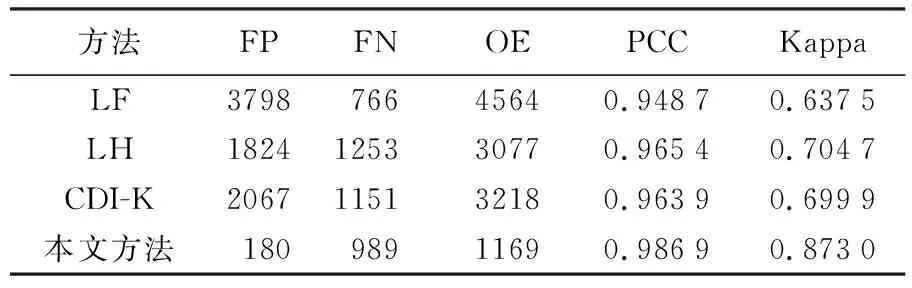
表2 黄河地区数据集的变化检测评价
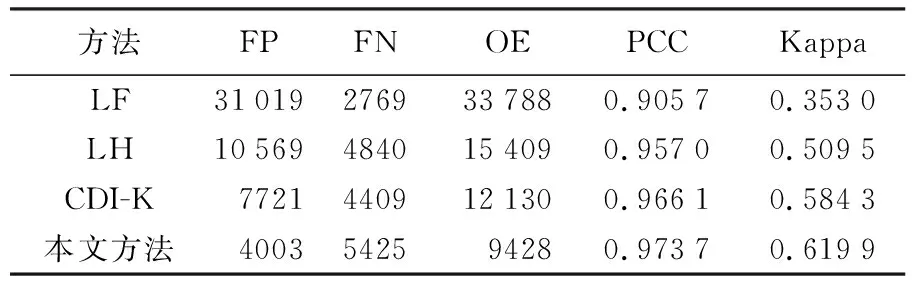
表3 北京地区SAR影像数据集的变化检测评价
利用本文方法对3组数据集获取的差异图的超像素分割图、前景排序图及排序图与对数差异图点乘结果如图9所示。图9中的前景特征排序图(b)、(e)、(h)表明本文方法强化了部分变化区域并弱化了大部分未变化区域,但是存在强化了变化区域的边界区域(实际是未变化区域)的问题。单像素对数差异图具有保留变化细节的特性,将前景特征排序图与单像素对数差异图进行点乘,可以实现强化变化区域并抑制未变化区域内的噪声,从而提高变化检测的精度。通过对图9(c)、(f)、(i)做OTSU阈值分割即可得到最终变化检测结果(图8(d)、(i)、(n))。
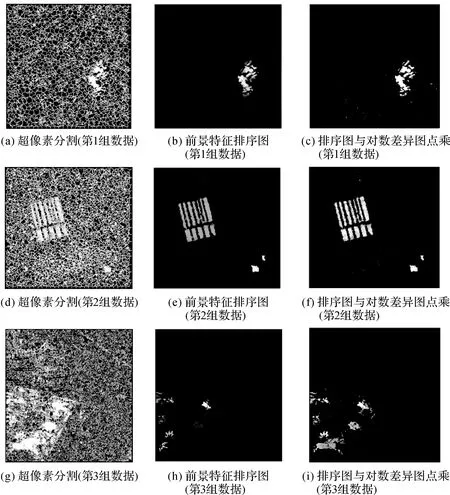
图9 3组数据集本文方法的中间结果Fig.9 The intermediate results of proposed method on three datasets
2.7 算法定性分析
由于以上3组图像尺寸均较小,为尽量避免检测结果的主观性影响,所以基于分辨率为3 m的TerraSAR-X卫星提供的两幅分别于2012年1月11日和2013年1月19日拍摄的SAR影像进行变化检测的研究,显示地域均为北京奥林匹克公园中心鸟巢体育馆附近,图像大小均为2420×2240像素,前后时相SAR影像和利用GoogleEarth得到的光学遥感影像、变化区域标记图及选择合适的超参数应用本文方法得到的变化检测图如图10所示,将2240×2420像素大小的SAR影像分割为4个部分分别进行检测再拼接在一起。由最终SAR影像的变化检测图即图10(c)与变化区域标记图即图10(f)对比定性分析可以看出检测结果具有一定的可靠性和准确性,但也存在由于道路区域等散斑噪声的干扰而导致的误检、漏检,以及在较大尺寸的SAR影像变化检测中不同的数据分布对超参数选择具有一定的依赖性,包括对数据的滤波预处理的选择。
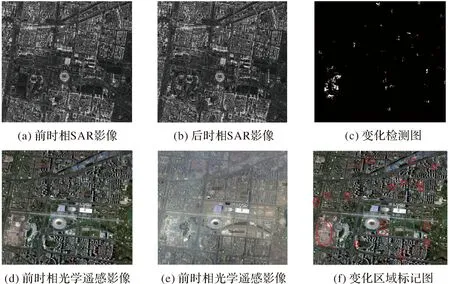
图10 一组较大尺寸SAR影像及其变化检测Fig.10 A large-size SAR image dataset and its change detection image
3 总结与展望
针对流行排序算法的中心先验假设不适用于SAR影像边缘变化检测以及变化区域内部存在误检测的问题,本文设计了一种基于超像素分割和前景特征流行排序的SAR变化检测方法。该方法构造基于单像素和邻域融合的对数比差异图,并对差异图进行SLIC超像素分割,利用灰度值构造无向图,基于前景特征的流行排序得到最终排序结果即显著性图,将显著性图与单像素对数差异图点乘的结果图进行阈值处理后得到最终二值变化检测图。本文在3组数据集上与其他算法进行了定量分析对比,验证了本文方法的有效性。尤其是对不均匀SAR影像的变化检测,本文方法整体性能优于其他算法。本文方法仍有一些不足:①算法性能依赖SLIC超像素分割结果,如果分割结果无法完全贴合变化区域的边界,则会导致分类错误。如何得到更精确的边界分割结果是今后需要进一步研究的方向。②本文方法对超参数的选择具有一定的依赖性,在不同的数据集上需要选择不同的超参数,实现超参数的自适应选择是未来需要解决的问题。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
数学物理学报(2022年2期)2022-04-26
中学生数理化·七年级数学人教版(2022年11期)2022-02-14
新世纪智能(数学备考)(2021年9期)2021-11-24
河北地质(2021年1期)2021-07-21
新世纪智能(数学备考)(2020年9期)2021-01-04
科普童话·学霸日记(2020年1期)2020-05-08
中国生物医学工程学报(2019年5期)2019-07-16
小天使·一年级语数英综合(2019年2期)2019-01-10
中学生数理化·高一版(2018年10期)2018-11-08
