
基于CM-GCT的尾矿坝在线监测位移分级预警阈值研究
2022-11-28 12:23袁友翠胡少华杨文东
武汉理工大学学报(信息与管理工程版) 2022年5期
袁友翠,胡少华,吴 浩,昝 军,杨文东,周 琳
(1.武汉理工大学 安全科学与应急管理学院,湖北 武汉 430070;2.华中师范大学 城市与环境科学学院,湖北 武汉 430079;3.湖北省安全生产应急救援中心,湖北 武汉 430070)
尾矿坝筑坝材料性质不同,监测环境复杂,运行期间溃坝风险大,位移作为能直观反映坝体运行状态的监测量,是判断尾矿坝是否处于正常运行状态的重要指标[1-2],现行监测规范未明确规定预警方法[3],科学确定坝体位移的分级预警阈值对于评估尾矿坝的安全有重要意义。
近年来许多研究人员已提出多种确定尾矿坝预警阈值的方法,大致可以分为数理统计法和结构分析法两类[4]。数理统计法主要以典型小概率法与置信区间法为主,如周稳忠等[5-6]通过典型小概率法确定大坝位移的预警阈值;李姝昱等[7]提出用置信区间法拟定大坝水平位移的安全监控指标,但是这两种预警阈值确定方法都难以把握数据之间的模糊性和随机性,同时所需要的事故发生概率主要依据以往的经验进行确定,计算的阈值准确性较低。在结构分析法方面,任杰等[8]从稳定和强度原理出发分析极值状态下的预警阈值,没有利用往年的在线监测数据,理论性强,不适合工程应用。此外,以上研究方法只能确定尾矿坝位移的单级预警阈值,无法根据坝体溃坝的危险程度进行相应级别的预警,容易造成预警等级和应急措施不匹配引起人力、物力等资源损失。因此,根据尾矿坝位移监测数据,建立多级预警体系才能提高尾矿坝的风险预警能力。
云模型[9](cloud model,CM)能够通过大量位移在线监测序列,实现定性概念与定量数据之间的转换,已经被广泛的应用于预警阈值体系的建立。尾矿坝相邻监测点之间的位移相互影响,但目前通过CM只能计算单测点位移的预警阈值,过于片面,不能准确衡量大坝整体发生溃坝的危险等级[10],而通过多测点确定的预警阈值才能综合反映尾矿坝的工作状态[11-12]。泛概念树[13](general concept tree, GCT)在处理概念提升方面应用广泛,采用GCT可以实现单侧点到多测点确定尾矿坝预警阈值的过渡。基于此,首先将各测点位移的在线监测序列输入CM获得其定性概念的特征值,然后通过GCT构建尾矿坝位移泛概念树,获得表征坝体整体位移的特征值,进一步依据“3En”原则计算坝体位移的正常运行值和分级预警阈值,从而形成基于云-泛概念树(CM-GCT)的尾矿坝分级预警阈值的确定方法。结合工程实例,将确定的预警阈值与单侧点预警阈值和基于熵-云耦合确定的预警阈值进行比较,验证所提方法的合理性及精确性。
1 尾矿坝分级预警阈值模型
1.1 问题描述
服役期间尾矿坝承受外部荷载或环境发生改变时,大坝整体会发生相应的变形,这种变化可能会导致溃坝事故。为了避免事故发生,减少损失,有必要利用坝体的位移监测数据确定风险等级。以往利用大坝位移监测量确定预警阈值的方法大多以位移变化最大的测点作为参考对象,将单一监测点数据的计算结果作为大坝整体的预警阈值,此方法虽然简单,但容易造成预警值过大,无法有效反应尾矿坝整体溃坝的危险性。因此,应该综合多个监测点的位移数据确定大坝整体的风险阈值和风险等级,才能实现对尾矿坝的精准预警和分级预警。
尾矿坝发生变形时,各监测点形成的位移矢量场δ可分解为平行坝体轴线方向的位移δL和垂直坝体轴线方向的位移δV,如式(1)所示。
δ=δL(x,y,z)+δV(x,y,z)
(1)
尾矿坝在卸料整平过程中,下层子坝受到尾砂自身重力的影响,δV出现较大变化,同时子坝侧向膨胀会引起水平方向上的位移。同时以坝体的水平和垂直位移作为研究对象,从两个方向计算位移分级预警阈值,为尾矿坝的运行管理提供更全面的理论依据和决策支持。
1.2 模型构建
1.2.1 基于CM的尾矿坝各测点位移特征值的模型
云模型是用自然语言值表示的某个定性概念与其定量表示之间的不确定性转换模型,主要包括正、逆向云两种发生器[14]。逆向云发生器可以实现尾矿坝各测点位移的在线监测数据与表征其定性概念的3个特征值Ex、En、He之间的转换,通过正向云发生器可获得各测点位移特征值的云滴分布图。云图中Ex为各测点位移在线监测序列的均值,表示云滴所代表的位移在云图中分布的重心位置;熵En为在线监测数据之间的模糊性,En越大,位移数据的模糊性越大;超熵He为云滴厚度。
1.2.2 基于GCT的尾矿坝整体位移特征值的模型
通过CM只能计算尾矿坝单测点位移的特征值,无法获得表征坝体整体位移定性概念的特征值,为解决上述问题,引入GCT与CM进行结合,可以有效的将单测点位移特征值通过概念提升过程进行概念升级获得表征尾矿坝整体位移的特征值。
GCT是指通过构建泛树结构表示某个子概念属于多个高层父概念之间复杂概念关系的一种方法,其中子概念通过概念跃升过程可以爬升为父概念,基于云模型的概念跃升过程通过云综合算法[15]可以实现。将GCT用于计算尾矿坝位移特征值时,子概念为表征单测点位移的特征值,父概念为表征尾矿坝整体位移的特征值,单测点位移的特征值通过云综合算法进行两两相互综合实现向尾矿坝整体位移特征值的过渡,达到从多测点角度考虑整体位移特征值的目的,有效避免了CM只能将单测点位移特征值作为大坝整体位移特征值引起预警不准确的问题。单测点位移特征值Ex、En、He的综合过程分别如式(2)~式(4)所示。
(2)
(3)
(4)

(5)
(6)
式中:MC1(x)与MC2(x)分别为子云C1、C2的期望曲线,两者的位置关系如图1所示。

图1 两子云期望曲线的典型位置关系
尾矿坝单测点位移特征值在进行综合时会发生异质性变化,变化总量hc的大小会影响大坝整体位移特征值的精确性,为了选择合适的监测点位移特征值进行综合,基于局域最佳适配思想寻找最优综合云,构建的概念树层次图如图2所示,其中云综合时发生的异质性变化总量hc的计算公式如式(7)所示。
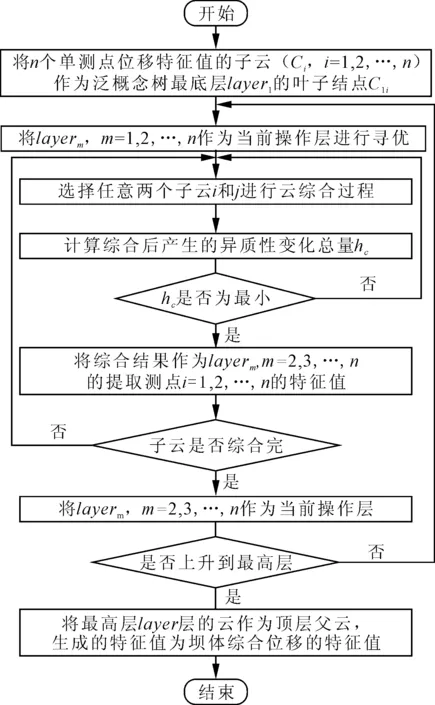
图2 泛概念树构建过程
hc=wExhEx+wEnhEn+wHehHe
(7)
式中:hEx、hEn、hHe分别为特征值Ex、En、He的异质性变化量;WEx、WEn、WHe分别为异质性变化量hEx、hEn、hHe的加权值。hEx由两个子云和父云的特征值Ex计算得到,如式(8)所示;hEn由两个子云和父云的面积和特征值En计算得到,如式(9)所示;hHe由两个子云和父云的面积、周长和最小外包矩形的周长得到,如式(10)所示。
hEx=Ex-(Ex1+Ex2)/2
(8)
hEn=nmEn-n1En1-n2En2
(9)
(10)
式中:nm、n1、n2分别为父云和相邻两个子云的面积;lm、l1、l2分别为父云和相邻两个子云的周长;bm、b1、b2分别为父云和相邻两个子云的最小外包矩形的周长;WEx、WEn、WHe分别为特征值异质性变化量的加权值。
1.2.3 基于CM-GCT的尾矿坝位移分级预警阈值模型
通过CM-GCT构建的表征尾矿坝位移特征值的泛概念树如图3所示,将最高层layer所代表的大坝整体位移的特征值和云滴数n输入正向云转化器获得云图CM,得到不同云滴在云图中的分布位置和隶属度μ(x),云图中任一小区间Δx的云滴群对尾矿坝是否安全的定性概念的贡献度ΔC如式(11)所示。

图3 尾矿坝整体位移特征值的泛概念树层次图
(11)
由“3En原则”可知,在云图中落在区间[Ex-3En,Ex+3En]内的云滴对尾矿坝是否安全这一定性概念的贡献度为99.74%,而落在区间之外的云滴对于定性概念的贡献度忽略不计。因此,在“3En”区间内的监测序列可定为尾矿坝位移的正常运行值。此外依据尾矿坝管理规范所规定的坝体位移的黄、橙、红预警阈值分别为正常运值的1.3、2和3倍[16]可得尾矿坝的各级预警阈值,所以基于CM-GCT的尾矿坝在线监测位移的分级预警阈值体系主要流程如图4所示。

图4 基于CM-GCT的尾矿坝位移分级预警阈值体系的流程
2 工程实例
2.1 工程概况
湖北省某尾矿坝为山谷型尾矿坝,其主要由3部分构成,分别为初期坝、副坝和排洪系统。该尾矿坝采用上游式筑坝方式堆积坝体,每一级分级子坝标高为3 m,现已堆积至第18级子坝,坝长760 m,总坝高95 m,总库容1 880万m3,为三等库。此坝体采用GNSS监测技术实现各监测布点的自动变形测量,综合考虑坝体多个测点的位移监测数据,选取A子坝的4个测点进行分析,分别为A-1、A-2、A-3和A-4。将每个测点在2017年2月1日—2019年2月1日的水平位移δL和垂直位移δV的在线时间监测序列作为数据样本计算位移特征值,其中每个监测布点的位移数据总量n为800。该尾矿坝各坝面监测布点的相对位置如图5所示。

图5 尾矿坝监测点布置图
2.2 基于CM-GCT的尾矿坝位移分级预警阈值的确定
尾矿坝在运行过程中由于外界环境复杂导致部分位移监测量误差大,需要对其进行预处理,然后再将各监测点去噪后的数据进行可放回重复抽取。由文献[17]可知,当分组数m为50,随机抽取次数为100时,将所抽取的数据输入逆向云发生器获得的3个特征值的误差最小。各测点在水平和垂直方向上位移的特征值如表1所示,将特征值输入正向云发生器可得各测点位移特征值的云图。

表1 各测点位移的特征值
各监测点位移的云图输出后,需要确定云图的最优综合云才能进行概念提升过程,寻优前要设置Ex、En、He的权重参数wEx、wEn、wHe才可以计算加权异质性变化总量hc,参考相关文献和计算确定wEx、wEn、wHe分别为0.3、0.4、0.3。结合式(2)~式(10)和图2可得各监测点位移的特征值,尾矿坝整体水平位移和垂直位移的特征值分别为(1.28,0.79,0.07)、(2.92,1.96,0.18),此过程中构造的坝体水平和垂直位移的泛概念树如图6所示。
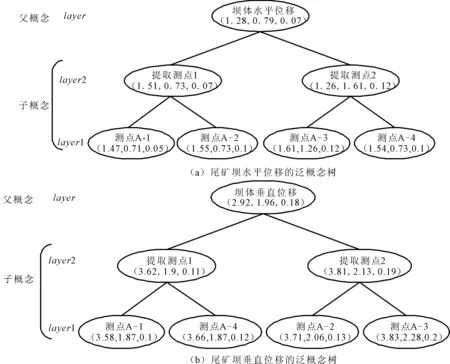
图6 尾矿坝水平和垂直位移的泛概念树的构建过程
将基于CM-GCT获得的大坝整体水平及垂直位移的特征值分别输入正向云发生器后获得云图及云滴的分布位置,根据各云滴对坝体安全状态的贡献度不同,可得水平与垂直位移的正常运行值;依据尾矿坝管理规范规定的黄、橙、红预警阈值与正常运行值的倍数关系,得坝体水平及垂直位移的分级预警阈值,如表2所示。

表2 基于CM-GCT的尾矿坝位移的正常运行值和分级预警阈值
2.3 基于CM-GCT拟定的分级预警阈值合理性的验证
熵-云耦合模型[18]在计算尾矿坝的综合预警阈值时充分考虑了各监测点在空间上的关联性,可以较好的反映尾矿坝整体的工作性态,为验证基于CM-GCT计算的尾矿坝综合位移预警阈值的合理性,将其与基于熵-云耦合模型计算的综合预警阈值进行对比。
通过对A子坝的各监测点进行分析,可确定在水平位移时各监测点的权重分布熵分别为0.21、0.22、0.34、0.23;在垂直位移时各监测点的权重分布熵分别为0.25、0.25、0.26、0.24,根据各监测点的位移权重分布熵和在线时间序列可得尾矿坝的水平和垂直位移,将位移数据输入逆向云发生器,获得坝体水平和垂直位移的特征值分别为(1.37,0.93,0.2)、(2.69,2.37,0.26),进而可得基于熵-云耦合模型的水平和垂直位移的正常运行值和分级预警阈值如表3所示。基于CM-GCT和熵-云耦合模型的分级预警阈值对比如图7所示。
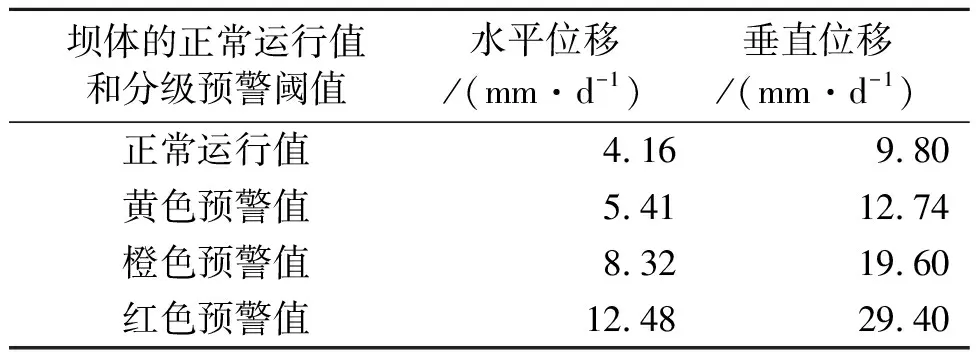
表3 基于熵-云模型的尾矿坝位移的正常运行值和分级预警阈值
由图7可知,基于熵-云耦合模型计算的预警阈值略大于基于CM-GCT计算的预警阈值,这是由于两种阈值在拟定过程中计算的综合位移特征值不同。基于CM-GCT确定的综合位移特征值是多个单测点的位移特征值经过云综合过程得到的,而熵-云耦合模型计算的综合位移特征值是先将各测点位移进行综合,再将综合位移通过一次逆向云转化器直接获得的。因此,相较熵-云耦合模型,基于CM-GCT计算的尾矿坝位移的特征值可以更好的消除外界环境和监测误差带来的影响,得到更精确的反映坝体安全状态的正常运行值和分级预警阈值,所以基于CM-GCT提出的分级预警阈值拟定方法更加科学合理。

图7 CM-GCT模型和熵-云耦合模型确定的各级预警阈值对比
2.4 基于CM-GCT拟定的分级预警阈值精确性的验证
将单测点预警阈值作为坝体综合位移的预警阈值,以对比单测点预警阈值与基于CM-GCT确定的综合预警阈值的精确性。A级子坝的各监测点的分级预警阈值如表4所示。
由表4可知,A-3测点位移的正常运行值和分级预警阈值最大,将A-3测点作为典型测点,将此测点的分级预警阈值与基于CM-GCT计算的综合分级预警阈值进行对比分析,同时将两者检测的坝体位移异常率作为衡量两种预警阈值拟定结果准确性的标准。A-3测点在2017年2月1日—2019年2月1日的垂直位移变化曲线以及两种预警阈值拟定结果检测的位移异常率对比如图8所示。

表4 尾矿坝A级子坝各测点位移的正常运行值和分级预警阈值
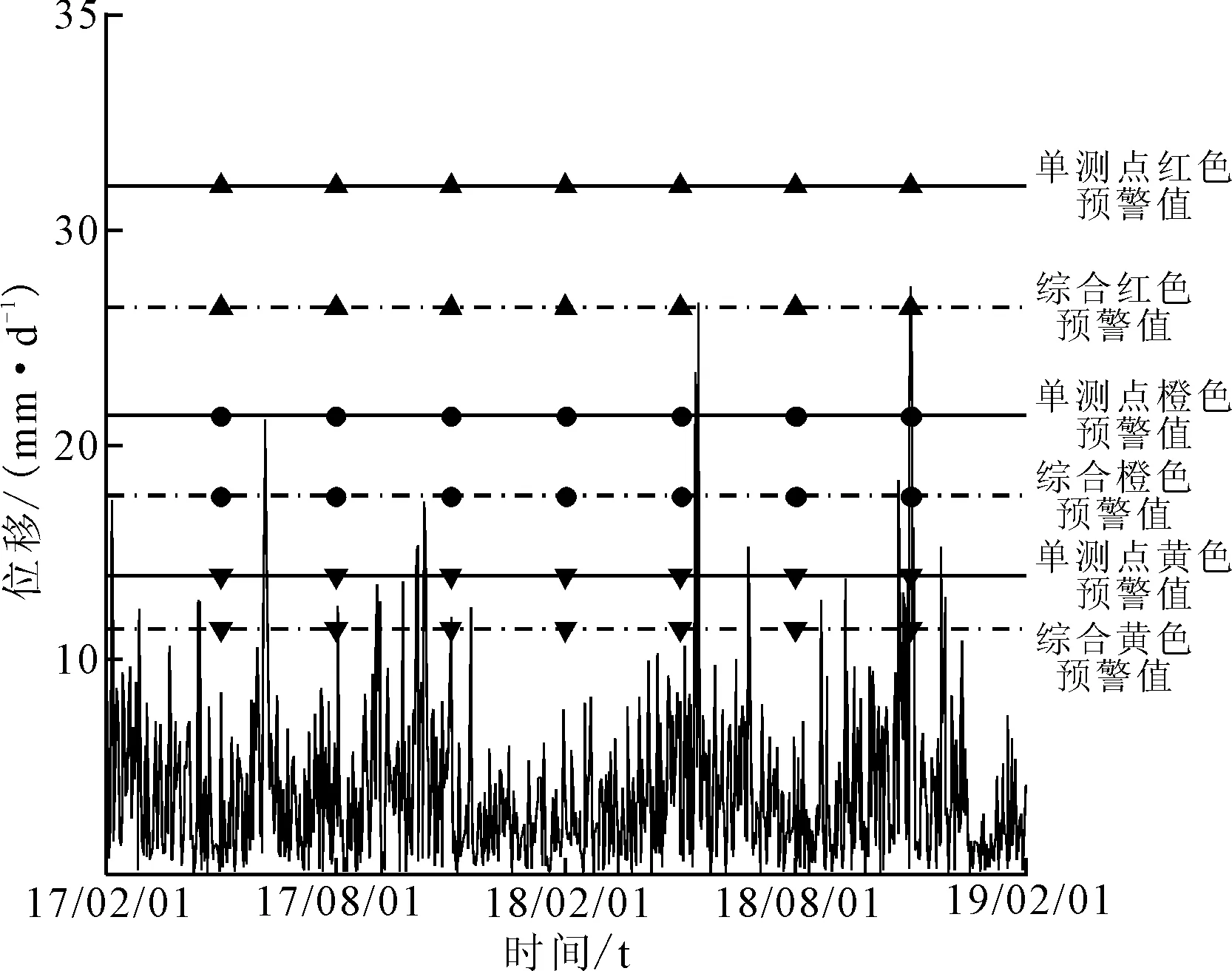
图8 A-3测点的位移变化曲线
由图8可知,在检测坝体位移是否超过红色预警阈值时,单测点红色预警结果没有检测到A-3测点位移出现异常情况,而综合红色预警结果检测的位移异常率为0.125%;在检测坝体位移是否超过橙色预警阈值时,单测点橙色预警结果和综合橙色预警结果检测的位移异常率分别为0.625%、1.125%;同理,当检测位移是否超过黄色预警值时,单测点黄色预警结果和综合黄色预警结果检测的位移异常率分别为2.25%、4.5%。所以从两者检测的位移异常率可知,基于CM-GCT拟定的分级综合预警阈值在检测坝体位移出现异常时的精确度更高,更能准确判断尾矿坝发生溃坝的危险等级。
3 结论
(1)基于尾矿坝表面进行在线监测获得坝体各监测点的位移时间序列,引入CM获得表征其各监测点位移定性概念的特征值;运用GCT模型将各测点位移的特征值通过云综合算法进行概念提升,获得表征大坝整体位移定性概念的特征值,从而构建基于CM-GCT的尾矿坝位移分级预警阈值模型。
(2)基于CM-GCT的尾矿坝位移分级预警阈值模型,可得某尾矿坝在水平方向上位移的分级预警阈值分别为:4.75 mm/d、7.3 mm/d、10.95 mm/d,在垂直于坝轴方向位移的分级预警阈值分别为:11.44 mm/d、17.6 mm/d、26.4 mm/d。
(3)通过对比熵-云耦合模型确定的尾矿坝位移分级预警阈值,可知所提出的预警阈值拟定方法更合理,安全裕度更高;通过与尾矿坝单测点位移分级预警阈值检测的位移异常率进行对比,可知笔者提出的预警阈值拟定方法更精确,更能反映坝体的运行状态。
猜你喜欢
建材发展导向(2021年19期)2021-12-06
数学物理学报(2021年5期)2021-11-19
选煤技术(2021年3期)2021-10-13
河北地质(2021年2期)2021-08-21
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
黑龙江水利科技(2020年8期)2021-01-21
矿产综合利用(2020年1期)2020-07-24
数学物理学报(2018年3期)2018-07-17
江西建材(2018年4期)2018-04-10
中国工程咨询(2017年9期)2017-01-31
