
基于PLECS的三相VIENNA型PFC电源的仿真设计
2022-11-27 10:36王杰,杨亮,张俊
机电工程技术 2022年10期
王 杰,杨 亮,张 俊
(中国船舶集团有限公司第七二三研究所,江苏扬州 225000)
0 引言
随着船上雷达/电子对抗等设备的用电负荷的成倍增加,给雷达阵面或电子对抗发射机供电的现有一次电源配电设备出现功率容量不足,功率密度低、体积大等问题。一次电源设备是由多个整流模块并联构成,其输入为三相交流船电,输出为高电压/大电流形式。其中,单个整流模块包含前级PFC电源和后级高频隔离式DC/DC电源。为提高整流模块的功率密度,重点需解决高功率密度下的大功率PFC电源技术设计、多相交错LLC电源技术等难题,本文重点围绕大功率PFC电源的仿真设计。
三相三电平VIENNA型的PFC电源为三电平Boost型中点箝位结构整流器的衍生,其电路结构简单、输入谐波电流含量低、开关管无直通风险和电压应力小等优点,因而受到国内外学者的广泛关注[1-3]。目前,VIENNA型整流电源广泛应用于新能源汽车的充电桩市场,该拓扑形式的控制策略主要有平均电流控制、单周期控制等。陈俊等[4-6]重点介绍了单周期控制技术应用于单相或三相PFC电源中的实现方式,其主要控制主要由模拟芯片构成,不利于参数调节与电源的全数字化实现;权运良等[7-8]介绍了采用数字控制芯片的平均电流控制方式,该控制方法主要涉及交流电压锁相、电压/电流的环路调节等,由于控制参数与控制算法在软件中实现,灵活性强,广泛应用于数字电源中[9]。为兼顾PFC电源的可扩展性和可调节性,解决电源的高功率密度问题,本文在已有的平均电流控制方法基础上,通过增加谐波注入,简化控制算法,提高开关频率,压缩电源中磁芯体积,来实现高功率密度下的大功率PFC电源的设计。文中利用电力电子专业级PLECS仿真软件,来建立PFC电源的仿真模型,通过仿真实验来验证参数设计的合理性和控制方法的可行性。
1 三相VIENNA型PFC电源的工作原理
三电平VIENNA型PFC电源的拓扑结构如图1所示。其中,ua、ub、uc为三相三线制的输入电压,ia、ib、ic为三相输入电流,输入电感为L1~L3,开关管为S1~S6,续流二极管为D1~D6,正/负母线电容:CP/CN,负载为RL。陈旭东等[9-12]给出了VIENNA整流器的不同工作模块和状态空间平均模型,通过调节S1~S6,实现输入电流的单位功率因数校正,此时输入侧阻抗可以等效成纯阻性负载。
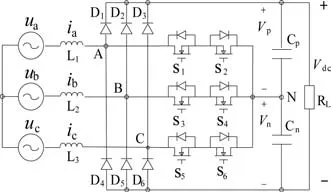
图1 三电平VIENNA型PFC电源的主拓扑
结合图1的三电平VIENNA型PFC电 源 的 主 拓 扑框图,A、B、C三相可看做三个独立的Boost型PFC电源[11-12],以A相ua的 工 作 原理为例,开关管S1与S2的驱动简化工作波形如图2所示(驱动为高电平时,对应的开关管导通;反之,开关管关断)。为方便示意,认为单开关周期内的调制波幅值为恒定不变。
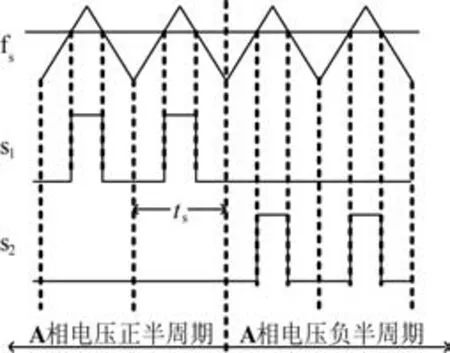
图2 开关管S1与S2的驱动简化工作波形
在A相电压为正时,开关管S1为开关状态,开关管S2为不导通状态。在S1导通时,ia电流流向为:电感L1—S1—S2的体二极管—中点N;在S1关断时,ia电流流向为:电感L1—D1—CP—中点N。
在A相电压为负时,开关管S2为开关状态,开关管S1为不导通状态。在S2导通时,ia电流流向为:中点N—S2—S1的体二极管—电感L1;在S2关断时,ia电流流向为:中点N—Cn—D4—电感L1。
2 三相VIENNA型PFC电源的控制与参数设计
2.1 平均电流控制
三相PFC电源的平均电流控制是指电压/电流的双闭环的控制方式,电压环可以调节直流母线电压,电流环可以调节三相输入电流的幅值与相位。根据坐标系不同,分为基于abc自然坐标系下的载波脉宽调制(SPWM)控制和基于dq旋转坐标系下的空间矢量调制(SVPWM)控制。由于SVPWM相比SPWM具有更高的电压利用率,在开关频率允许下,本文采用基于SVPWM的平均电流控制方式,其控制算法框图如图3所示。
结合图1与图3,三相电压uabc通过单同步电压锁相技术[6-7]得到输入电压的相位角θ0,输入三相电流iabc经abc/dq的旋转变换产生id与iq分量。电压闭环控制指:给定的直流输出Vdc与反馈的正/负电压之和(即:Vp+Vn)之间进行PI控制器调节,输出误差电压信号ΔVdc,其公式为:

图3 三电平VIENNA型PFC电源的控制算法框图

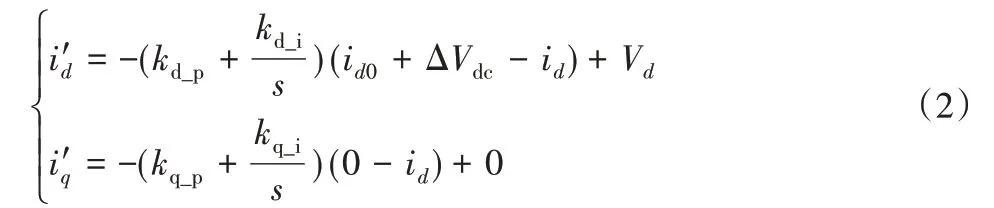
电流闭环控制:一方面,电压环输出值、缓启动初始电流值id0和反馈电流值id之间进行PI控制器调节;另一方面,给定的q轴电流为0,与反馈电流值iq之间进行PI控制器调节,从而实现输入电流的单位功率因数校正目的。
两个电流环输出分别加上电压uabc的dq坐标系下的分量Vd、Vq,稳态下,Vq≈0,由于三相输入电感量较小,文中忽略dq坐标下的电流id与iq相互耦合影响。从而得到的输出信号i′d、i′q的公式为:
PWM生成步骤如下:双电流环的输出值经过dq/abc反坐标变换及经归一化处理,得到三相基础调制波,其与注入的V0叠加,从而形成PWM的调制波。最后通过调制波与三角载波fs的比较,产生给S1~S6的六路驱动信号。其中,注入的V0指:Vn-Vp的中点平衡误差信号与三次谐波注入信号的叠加,其公式为:

本文在SPWM基础上,利用基波的三次谐波注入的方法,来实现SVPWM的控制效果,避免使用复杂的依据扇区划分的矢量计算,减小处理器在高频控制周期下的计算量。
2.2 主功率器件选型依据
主功率器件中二极管,MOS管选型主要考虑电压与电流应力两个方面,电压应力均为额定输出电压的一半,结合文献[15]中设计方法,得到二极管平均电流iD与有效值电流iD_RMS的计算公式为:

其中,调制比M的公式为:

式中:uINPK、iINPK分别为输入电压/电流的峰值。
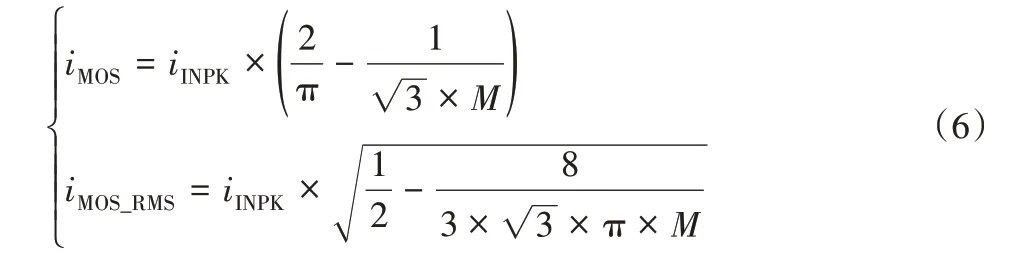
MOS管的平均电流iMOS与有效值电流iMOS_RMS的计算公式为:
输出电容的容值按电容容量的维持时间、消除因电容ESR产生的纹波电压、以及印制板空间布局等情况选取,其允许的有效值电流iC_RMS的计算公式为:

输入滤波电感用于消除输入的纹波电流,感值的大小与纹波电流、开关频率有关,结合文献[12]中推导,得到电感L的公式为:

需要注意的是,所计算出的电感量为额定负载下的,对照磁芯参数手册中感量与电流关系DC Bias特性曲线,按照额定电流下的感量不低于0电流下感量的70%选取合适的磁芯。
3 基于PLECS的三相PFC电源的仿真
3.1 建立PLECS仿真模型
按照图2中的控制框图和主电流参数设计方法,在PLECS软件中搭建PFC电源的仿真模型,部分设定的仿真参数如表1所示。
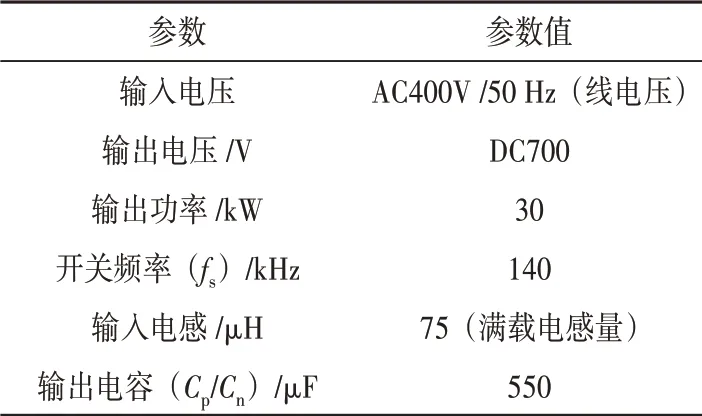
表1 仿真参数
在离散仿真时,需对控制回路中的时域积分器1/s进行z域离散化,离散化后为:T/(z-1)。T为控制周期,本文控制周期设定为1/35 ms。以带饱和的PI控制器为例,PLECS中的搭建模型如图4所示。
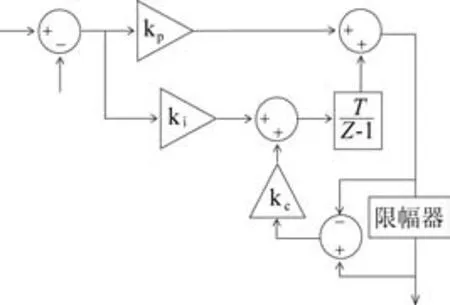
图4 抗饱和积分器PELCS离散仿真模型框图
3.2 仿真结果
由于PFC电源的输入为三相三线制,仿真时,通过构造虚拟中点,来读取三相AC230 V/50 Hz的相电压,满载下的输入相电压、电流仿真波形如图5所示。从图中可以看出,稳态时,输入三相电流与输入相电压同相位,实现单位功率因数校正,在输入电压为理想交流源下,对输入电流进行总谐波含量(THD)分析,约为0.9%。
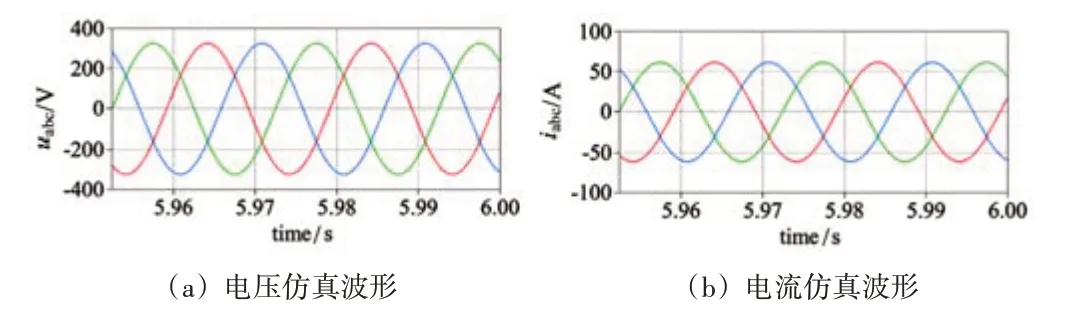
图5三相输入电压与三相电流仿真波形
图1 主拓扑中的A、B点电压VAB仿真波形,A相桥臂中,MOS管S1/S2对应的归一化后的PWM调制波仿真波形如图6所示。
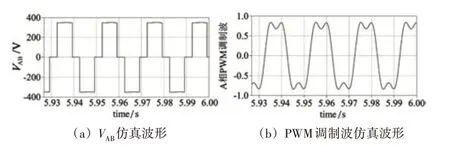
图6 主拓扑VAB、归一化A相PWM调制波仿真波形
其中,通过叠加三次谐波,PWM调制波峰顶类似为马鞍形状,实现了SVPWM控制效果;VAB电压波形近似为(+350 V,0,-350 V)三个电平状态,体现了三电平VIENNA拓扑的特点,验证了二极管、MOS管的最大电压应力为1/2直流母线电压。
直流输出电压Vdc波形、输出正电容电压Vp和负载RL上电流的波形如图7所示。为避免输出电压的开机过冲,Vdc从不控整流的平均565 V到闭环控制输出平均值700 V的建立时间约为4 s。稳态下,输出电压Vdc的电压纹波不超过2 V。以图7中正电容电压Vp为例,其稳态后的平均值近似为1/2Vdc=350 V,实现了输出正/负电容电压的中点平衡控制,此时正/负电容电压偏差不超过6 V。在RL满载下,输出的平均电流约为42.8 A,输出功率P0=29.85 kW,满足输出功率要求。
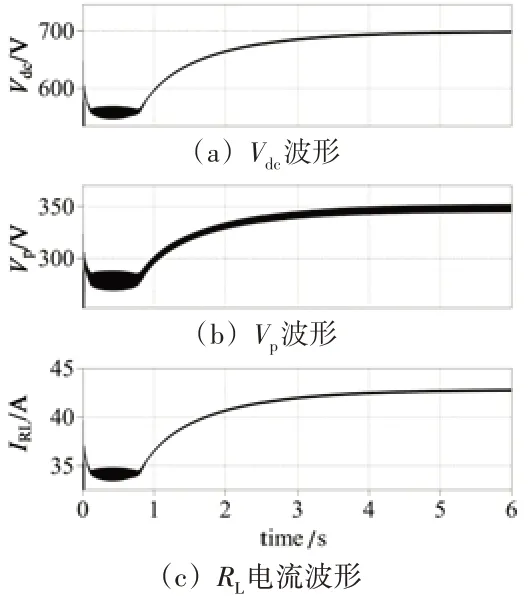
图7 Vdc、Vp电压与负载RL电流仿真波形
在PLECS软件中,利用电流测量模块,得到主拓扑中二极管、MOS管、MOS管体二极管的平均电流与有效值,搭建磁芯的磁损和铜损模型,忽略辅助电源的功耗,计算出总损耗功率,加上输入电压电流波形得到的输入供电功率,计算出瞬时输入功率。输出瞬时功率由输出电压与输出电流相乘计算得到。图8所示为计算出的输入输出瞬时功率仿真波形,PFC电源的满载效率约为98.2%,满足效率指标要求。
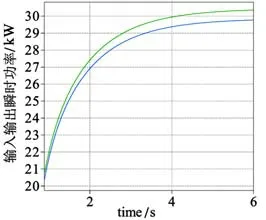
图8 输入输出瞬时功率的仿真波形
4 结束语
本文先对三相VIENNA型PFC电源的工作原理、控制方式进行了详细介绍,列出了部分主功率器件的选型依据,然后借助PlECS软件来完成仿真,验证了本文所采用的控制算法的可行性和参数设计的合理性,有利于加快实物样机的开发设计。
本文所讨论的单个PFC电源在大功率应用场合,通常需要多个开关管并联,存在驱动开关管的一致性问题,对于高功率密度下的大功率PFC电源还有两个三相VIENNA型PFC电源的交错并联运行的设计方法,该方法有利于降低单个PFC电源的电流应力,其涉及控制算法、同相两电感的磁集成技术等难题,将在后续开展进一步研究。
猜你喜欢
防爆电机(2022年3期)2022-06-17
选煤技术(2022年2期)2022-06-06
铁道机车车辆(2021年3期)2021-07-12
湖北工业大学学报(2021年2期)2021-04-28
科学家(2021年24期)2021-04-25
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年10期)2017-04-18
