
智能驾驶辅助系统测试技术探讨
2022-11-27 10:36周勇强马一超
机电工程技术 2022年10期
周勇强,王 路,马一超,邵 洋
(广汽本田汽车有限公司技术部,广州 510000)
0 引言
智能驾驶汽车是一个集环境感知、决策、规划与控制等多项功能于一体的综合智能系统。智能驾驶汽车通过车载传感器或网联通信设备等媒介,获取车辆行驶周边环境信息,智能自主地做出决策并控制车辆的行驶、转向和制动,使车辆能够安全、可靠地在道路上行驶,到达预订目的地。根据美国汽车工程师学会SAE发布于2014年提出的自动驾驶L0递增到L5的分级方案,该方案成为被普遍接受的标准[1]。如表1所示。
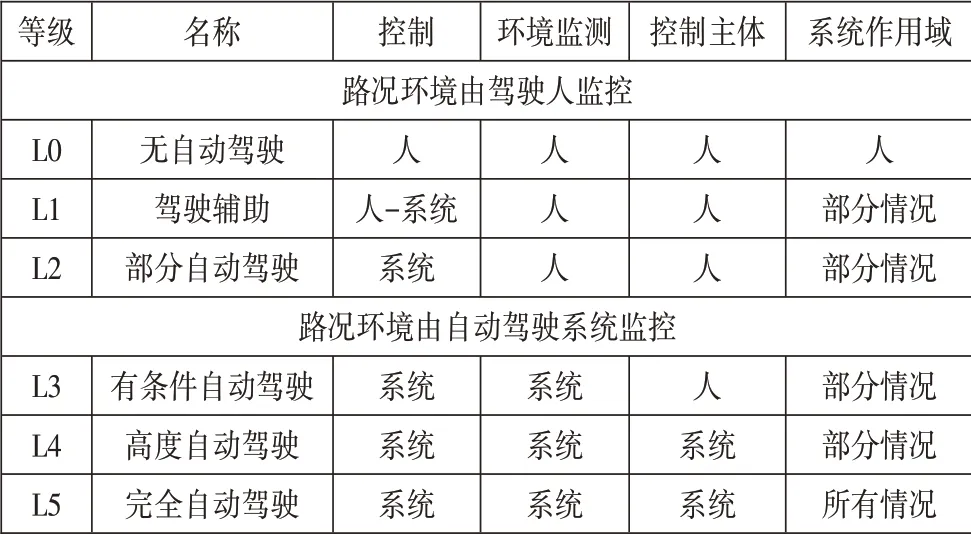
表1 自动驾驶L0~L5分级方案
在L0~L2的应用层级,先进驾驶辅助系统(Advanced Driving Assistant System,ADAS)是用于警示或辅助驾驶员的汽车安全系统,通过增加驾驶员可利用的信息,在必要时采取措施保障驾驶员和车辆的安全性,已逐步演化为发展最快的汽车应用领域之一。
虽然ADAS技术能带来极大的便利,但技术的安全性目前做的不完善,从2016年Uber智能驾驶车辆撞人至2018年,全球已经发生了10余起由于自动驾驶导致的事故,虽然L2、L3级别车辆已经量产,但要真正实现在道路上行驶还有一定的差距,只有通过完善的ADAS系统测试技术,才能在产品投产前尽早发现问题,挖掘隐藏的功能缺陷及不合理之处,从而为汽车产品的品质管理提供坚实保障[2]。
在国内的研究应用方面,张可科等[3]基于摄像头传感器,对车辆AEB(自动紧急制动系统)的硬件在环仿真测试进行了研究。刘雨佳等[4]以先进驾驶辅助系统中的LDW(车道偏离预警)功能为例,分析了的应用场景,最后将HMI设计应用到驾驶模拟器上进行可用性测试。吴君等[5]通过模型优化,将基于硬件在环台架的测试结果与实车测试进行对标分析,更好地支持车辆的快速开发及智能驾驶功能测试。但总体而言,由于相关法规与测试标准仍处于编制讨论阶段,尚未形成完善的测试体系与标准,主要依赖研究机构与技术人员根据工程经验对智能驾驶辅助系统功能进行试验验证。
本文基于国内外已有ADAS测试方法和流程的分析,分别从不同的在环测试的流程中,总结关联的技术原理、评价方法、软硬件需求以及测试场景的选择,同时结合整车制造厂所拥有的技术储备,探讨并建立开展ADAS系统测试的方法和流程。
1 已有测试方法分析
在ADAS智能驾驶开发测试的V流程中,测试分为4个环节,如图1所示,分别为仿真测试、场地测试、封闭区域测试和道路测试。仿真测试是研发测试的主要项目,需要覆盖绝大多数驾驶场景、道路类型和交通工况;场地测试时根据指定的法规和标准,使用车辆在典型的场地中进行测试;封闭区域测试是在场地的基础上增加环境、道路等因素,如封闭的汽车试验场;实际道路测试是最后阶段的测试内容,主要目的是评估在实际道路上驾驶时的系统功能,是ADAS系统测试的重要阶段[6]。
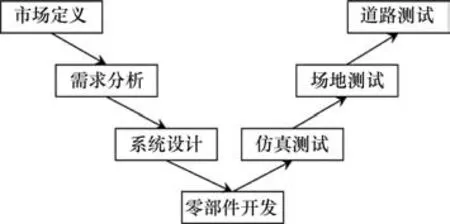
图1 ADAS智能驾驶开发测试V流程
1.1 仿真测试
仿真测试是控制系统算法开发测试中,十分关键的一步,可以对开发的算法在应用到实车上之前进行充分的验证,既能减少功能算法出现失误的概率,同时提高测试效率,又能缩短开发周期,降低成本。ADAS辅助驾驶系统的仿真测试包含模型在环测试(Model in the Loop,MIL)、软件在环测试(Software in the Loop,SIL)、硬件在环测试(Hardware in the Loop,HIL)[7]。如图2所示。
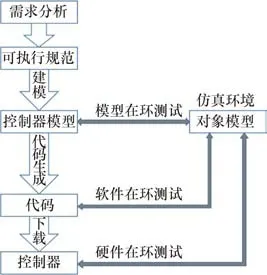
图2 X-in-Loop
模型在环(MIL)测试是用模型驱动,例如在MATLABSimulink中建立模型。在开发阶段初期建模测试阶段开展的仿真测试,在模型层面实现闭环测试,目的是工程师针对模型和算法开展集成测试。如图3所示,模型在环(MIL)测试仅适用于ADAS系统开发初期用于建立系统集成架构所开展的测试,确保模型建立符合开发要求,仅用于初始开发部门的测试。

图3 MIL仿真代码生成程序
软件在环(SIL)测试是对控制策略模型转换成为编译C/C++代码后开展的软件测试,如果与模型在环测试使用相同的测试用例,测试后得到了与模型在环测试相同的结果,则生成的编译代码和生成代码的模型是一致的,其测试意义在于确认代码生成过程中,是否存在错误[8]。软件在环(SIL)测试适用于仿真代码与目标程序语言之间的转换确认,并未涉及实车或实体零件的测试。
硬件在环(HIL)测试是一种半实物仿真系统,由实际的控制器和虚拟的执行机构组成。系统利用实时处理器运行仿真模型,模拟执行机构的运行状态,通过输入/输出(I/O)接口与控制器连接,对控制器开展系统的测试,从而确认控制器能否在真实环境中使用[9]。如图4所示,开展硬件在环(HIL)测试,硬件方面需要搭建场景模拟器、感知模拟器和执行器及其驱动机构,软件方面需要搭配匹配的控制程序,针对整车制造厂而言,感知机构、执行器和控制器是有能够投入量产的零件,是不需要单独构建。而场景方面是比较缺乏,需要付出极大成本。故从成本和收益的角度而言,整车制造厂开展硬件在环(HIL)测试主要受到了场景模拟的限制。

图4 含转向系统的硬件在环仿真测试系统
1.2 实车测试
为了提供真实的交通环境,ADAS系统测试需要在整车上完成。实车测试主要分为封闭区域测试和开放道路测试。封闭区域测试目前有封闭场地测试和实验室测试。
1.2.1 封闭场地测试
封闭试验场地测试为封闭交通环境下进行的试验,通常在预设的封闭环境中进行。测试形式包括人工城市、试验跑道以及半虚拟化测试。人工城市Mcity是世界上第一个针对智能驾驶汽车技术测试而设计的受控测试环境[7],由美国密歇根大学在2015年在工厂基础上改建而成,如图5所示。由40个建筑元素组成,包括隧道、桥梁、高速公路,可以进入人行道交叉口的仿生机器人。除天气状况外,所有测试条件都是可重复再现的。然而建设测试专用的人工城市成本较高且耗时较长,而且车辆必须保证完备功能。

图5 美国密歇根大学Mcity受控测试场地
1.2.2 实验室测试
实验室测试是在实验室内开展整车在环测试,通过设定场景引发外部环境和传感器信号变化,从而完成对于智能驾驶辅助系统的功能测试。根据测试条件可划分为侵入性和非侵入性两种。
侵入性测试方法会进行车辆构造的改动,常见方式是断开ECU单元并直接将相关数据连接注入到数据总线当中,从而获得车辆针对这些数据的反馈操作。如图6所示,在测试实验室中,将车辆放置在转鼓试验台上,使用相对于受测车辆产生移动的实体对象模拟试验场景[10]。
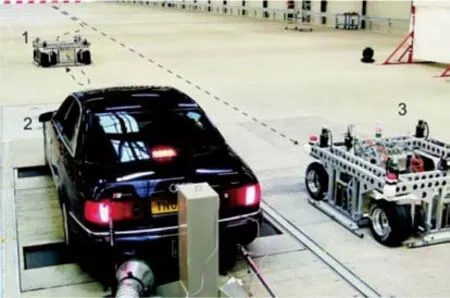
图6 针对自适应巡航控制系统的实验室测试场景
非侵入性测试也可采用虚拟仿真环境的输出设备(如视频显示屏、障碍实体等),为车辆传感器提供输入信息模拟真实环境。测试者可以完成特定道路的创建,定义车道数量、道路坡度水平、周围树木、其他车辆与行人。驾驶仿真模拟器经过动力学计算输出场景信号,经过设备转化,输入车辆的相应传感器设备中,从而使受测车辆产生相应作动。格拉茨工业大学的Michael E Gadringer教授等[11]基于该方法搭建完成“Driving Cube”项目,该项目将整车置于接入仿真环境的转鼓试验台上,通过虚拟环境的传感器仿真输出数据,为实车传感器的感知提供信息,模拟实际运行测试场景。
1.2.3 开放道路测试
开放道路测试是在社会道路上开展ADAS测试的方式,主要借助道路上的交通标识牌、车道线、红绿灯和往来的车辆,开展实车测试的方式[12]。
针对整车制造商最适合开展ADAS的测试形式即为开放道路测试,其优点在于,无需专门搭建测试硬件。且无需准备专门的试验场景,从社会道路的典型场景中选取即可,故试验成本低。同时由于社会道路的交通条件存在诸多不确定性,存在开发人员未考虑到的情形,试验有利于发现ADAS系统的设计缺陷[13]。
但也存在一定缺点,由于实际交通场景多变,测试条件的可重复性低,难以通过重复实验获得统一结论。同时进行实车测试ADAS功能无法正常作用时,有发生交通事故的风险。
2 实车测试方案
本文基于行业内ADAS测试的开展总结,提出一种开放道路测试方案,其中包含有针对TSR(交通标识识别)、LKAS(车道保持系统)、LDWS(车道偏离预警系统)和LSF(低速跟随系统)的开放道路测试方案。
(1)TSR功能测试方案
针对TSR(交通标识识别)的开放道路试验,主要为开展常规交通标识和其他标识的识别。如表2所示。
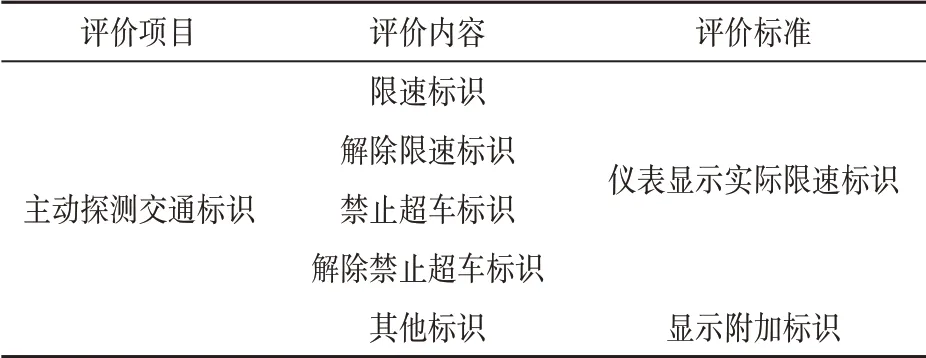
表2 交通标识识别
(2)LKAS/LDWS功能
针对LKAS(车道保持系统)和LDWS的开放道路试验,主要为车道识别、辅助驾驶功能、车道偏离报警功能共同开展。如表3所示。
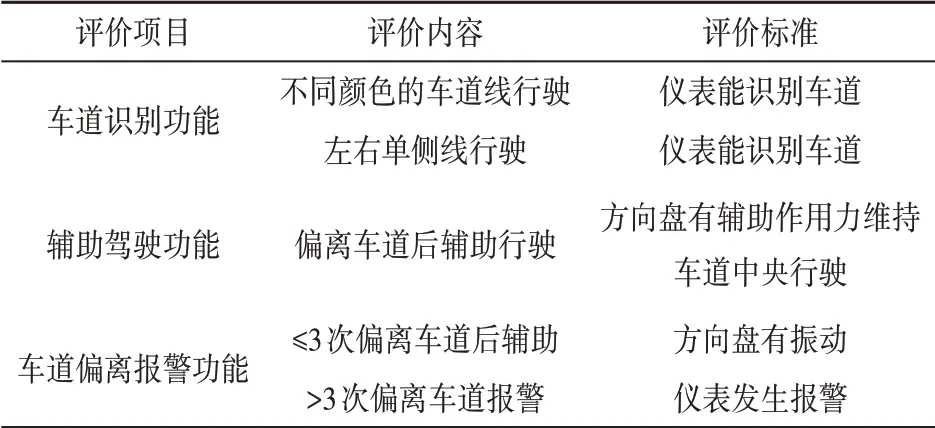
表3 LKAS/LDWS标识识别
(3)LSF(低速跟随系统)
针对LSF(低速跟随系统)开放道路试验,主要为加/减速感觉评价、停车距离评价、跟车距离评价项目。如表4所示。
3 结束语
本文总结了近年来针对智能驾驶辅助系统测试的相关研究,针对汽车行业内存在多种验证智能驾驶辅助系统的测试方法和技术进行介绍。通过总结行业内开展ADAS测试的技术路线,针对整车制造厂,本文提出ADAS开放道路测试方案,开展多车型的实车试验,试验结果和市场表现表明测试方案的有效性。
然而,随着自动驾驶技术的发展,整车在环测试仍无法满足所有智能驾驶系统的测试需求,众多自动驾驶解决方案提供商借助开放的道路测试条件对相关技术进行实车检测与验证。为了实现保证未来智能驾驶车辆的品质要求,要求整车厂商在落实推进智能驾驶整车在环试验测试技术的同时,也要紧跟行业发展趋势,根据政策标准,积极推进整车开放道路测试的开展。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年15期)2022-08-19
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
内燃机与配件(2021年11期)2021-09-10
青年歌声(2020年12期)2020-12-23
内燃机与配件(2020年20期)2020-09-10
消费导刊(2018年10期)2018-08-20
读写算·高年级(2015年1期)2015-07-25
汽车文摘(2014年7期)2014-12-13
