
基于机载LiDAR的山区型水库数据底板获取技术研究
——以乌东德水库为例
2022-11-24 10:48马玉婷赵林东石永恩冯国正
水利水电快报 2022年9期
马玉婷,赵林东,石永恩,谈 语,冯国正
(长江水利委员会水文局 长江上游水文水资源勘测局,重庆 400020)
0 引 言
水库数据底板是指水库蓄水前的原始地形资料,是水库库容计算及库容曲线核定[1-2]、淤积分析计算[3-5]、水资源管理[6-7]、防汛抗旱[8-9]、数字孪生水利[10-11]、地质灾害评估与整治[12-14]、库区水域岸线规划与利用[15-16]等的基础资料,是水库综合效能发挥的基础保障。目前,水库数据底板获取主要采用全站仪、RTK、航空摄影测量、三维激光扫描等方式进行。水库多建于山区,因此,研究山区型水库数据底板获取技术具有重要意义。山区地形复杂多变,群山起伏,沟谷纵横,全站仪结合RTK是当前水库数据底板获取的主要方式[17-19]。但是,采用全站仪、RTK测绘山区地形,具有效率低、人工走测难度大、作业风险大等不足[23-24]。无人机航空摄影测量的发展极大地推动了山区地形测绘技术进步,且航空摄影测量具有操作简便,高精度、高分辨率、高效率等特点,可被广泛应用[20-22],但采用航空摄影测量具有数据处理依赖作业人员经验、自动化程度低等不足,且航空摄影测量由于影像阴影、云影、植被遮挡等因素,可能造成数据精度损失大[25-26]。近年来,三维激光扫描技术也被逐步应用于水利工程地形测绘领域。三维激光扫描技术可根据作业环境及地形特征,选择地面固定、车载、船载、机载等平台进行作业[27-28]。由于山区地形坡度陡、水陆交通不便利,宜采用机载方式作业。机载LiDAR(Light Laser Detection and Ranging)是激光探测及测距系统的简称,已成功应用于山区水电工程地形测绘、山区水利测绘、山区河道地形测绘[29-30]。因此,本文以乌东德水库为例,开展基于机载LiDAR山区型水库数据底板获取技术应用研究,旨在为数字孪生流域数据底板建设提供技术参考。
1 机载LiDAR技术
本文采用有人直升机机载LiDAR技术开展山区型水库数据底板获取技术研究,利用机载LiDAR获取数据生产4D产品(DEM为数字高程模型,DOM为数字正射影像,DLG为数字线划图,DSM为数字表面模型;简称4D产品)。机载激光雷达扫描测量技术是集激光扫描技术、高动态载体姿态测定技术、高精度动态GNSS差分定位技术和计算机技术为一体的新型遥感技术。机载激光雷达扫描系统由空中测量平台、激光雷达扫描测距系统、POS系统、数码相机、控制单元等组成。机载LiDAR测量系统以飞机作为观测平台,激光测距系统作为传感器,通过POS系统实时对载体定位确定载体姿态参数,能通过直接定位快速、准确地获取复杂地球表面三维空间信息。机载激光雷达扫描系统需要激光雷达扫描测距系统和POS系统保持精确的同步时间,相互协调完成工作[31-34]。
1.1 作业流程
机载LiDAR生产4D产品作业分为航摄准备、数据采集、数据处理、成果生产4个阶段,作业流程见图1。

图1 机载LiDAR作业流程Fig.1 Airborne LiDAR operation flow chart
1.2 4D产品生产
1.2.1 DEM(数字高程模型)
利用分类后的地面点云数据,按一定格网间距插值,生产DEM。
1.2.2 DOM(数字正射影像)
DOM生产主要步骤如下:① 加载DEM成果,生成数字正射影像图DOM;② 匀色匀光,逐一检查各影像,调整色调,使影像色彩真实,并基本一致;③ 镶嵌拼接,按照分幅的图廓范围外扩10个像素来设定镶嵌范围,拼接成整幅的DOM。
1.2.3 DLG(数字线划图)
利用DOM编绘地物,利用地面点云生成等高线、提取高程注记点,人机交互修饰等高线,提取地物、地貌特征高程注记点。
1.2.4 DSM(数字表面模型)
DSM生产主要步骤如下:① 区域整理平差。结合POS数据提供的外方位元素,在每级影像上进行同名点自动匹配和自由网光束法平差;② 多视影像密集匹配;③ 三维TIN格网构建;④ 自助纹理映射,基于瓦片技术,将整个目标区域分割成一定数量的瓦片,将每个瓦片进行纹理贴附,生成DSM。
1.3 精度分析
1.3.1 DOM
DOM精度分析主要为平面位置分析,利用实地检测地物特征点,与DOM影像中提取特征点进行精度分析,计算如下:
(1)

1.3.2 点云平面
点云平面精度分析方法与DOM一致,计算见式(1)。
1.3.3 点云高程
在实测点附近提取点云对应高程点进行点云高程精度分析,高程中误差计算见式(2)。
(2)

2 实例分析
2.1 工程区概况
乌东德水电站位于四川省会东县和云南省禄劝县交界的金沙江下游河段,是下游河段乌东德、白鹤滩、溪洛渡、向家坝水电站4个梯级中的第1个梯级电站。乌东德水库库区全长252 km,选择受蓄水影响,水位抬升较大的坝址-拉鲊河段进行机载LiDAR地形测绘。坝址-拉鲊干流河段长165 km,主要支流包括龙川江12.5 km,勐果河3.4 km,普隆河13.0 km,鲹鱼河5.7 km。该河段属干热河谷,高温低湿,河谷深切、河床狭窄、岸坡陡峻,测区风力大,水陆交通条件差,为保证航摄安全与航摄质量,选择有人机机载LiDAR进行乌东德水库数据底板获取生产4D产品。
2.2 精度分析
2.2.1 DOM
DOM精度分布见图2,DOM精度为0~0.09 m,主要集中在0~0.07 m,DOM中误差为±0.04 m。SL 197-2013《水利水电工程测量规范》规定1∶500~1∶2 000比例尺高山地地形图平面位置测量允许中误差为图上±0.8 mm。按精度要求最严格的1∶500比例尺计算,实际平面位置允许中误差为±0.40 m。由此可知,DOM精度满足规范要求。

图2 DOM精度分布Fig.2 Accuracy distribution of DOM
2.2.1 点云平面
点云平面精度为0~0.45 m,主要集中在0~0.35 m,点云平面中误差为±0.14 m(图3)。SL 197-2013《水利水电工程测量规范》规定1∶500~1∶2 000比例尺高山地地形图平面位置测量允许中误差为图上±0.8 mm。按精度要求最严格的1∶500比例尺计算,实际平面位置允许中误差为±0.40 m,由此可知,点云平面精度满足规范要求。

图3 点云平面精度分布Fig.3 Accuracy distribution of point cloud plane
2.2.2 点云高程
点云提取高程点与野外检测点较差分布见图4。由图4可知,点云高程较差呈正态分布,数学期望值接近零,点云高程无系统偏差。点云高程精度为-0.35~0.35 m,点云总体高程中误差为±0.12 m。SL 197-2013《水利水电工程测量规范》规定1∶500~1∶1 000比例尺高山地地形图高程注记点允许中误差为±1/3h(h为基本等高距)。按精度要求最严格的1∶500比例尺地形图计算,高山地基本等高距为1 m,1∶500比例尺地形图高程注记点允许中误差为±0.33 m,由此可知,点云高程精度满足规范要求。

图4 点云高程差分布Fig.4 Difference of point cloud elevation correction
点云高程精度与地表覆盖物、地形坡度相关。不同地表覆盖类型点云高程精度统计见表1。不同地形坡度点云高程精度统计见表2。

表1 不同地表覆盖类型点云高程精度统计
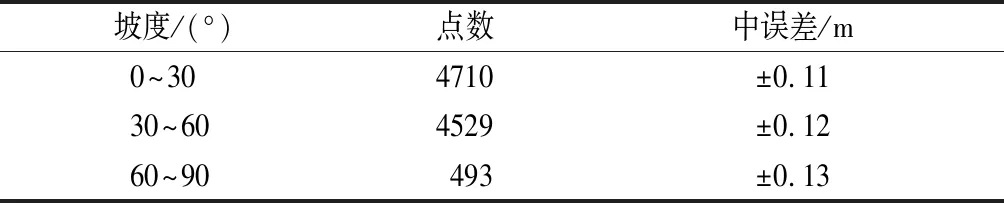
表2 不同地形坡度点云高程精度统计
由表1可知,不同地表覆盖类型点云高程中误差近乎相等,可见地表覆盖类型对点云高程精度影响甚微。由表2可知,随地形坡度增加,点云高程精度随之降低,但降低幅度较低,精度均优于±0.13 m。
3 结 论
利用机载LiDAR技术,进行乌东德水电站库区数据底板获取技术应用研究,构建LiDAR生产4D产品工艺流程,得到结论如下。
(1) 对不同地表覆盖类型、地形坡度产品进行精度评定。DOM精度±0.04 m;点云平面、高程精度均优于±0.15 m。数据精度满足山区型水库数据底板成果要求。
(2) 形成了航摄准备、数据采集、数据处理、成果生成的机载LiDAR技术生产4D产品作业流程,为山区型水库数据底板获取提供新的解决方案,对机载LiDAR生产作业具有参考价值。
(3) 机载LiDAR技术可快速准确获取地面点云、DOM数据,构建地表模型,生成地形图、断面图及三维可视化成果,丰富了成果表达,建立的水库数据底板信息档案为水库综合效能发挥提供基础数据。
(4) 采用机载LiDAR技术降低野外作业安全风险,提升外业工作效率,提高测量精度,适用于山区水库数据底板获取。
猜你喜欢
当代陕西(2020年23期)2021-01-07
当代陕西(2020年17期)2020-10-28
艺术品鉴(2019年12期)2020-01-18
小太阳画报(2018年7期)2018-05-14
学生导报·中职周刊(2018年16期)2018-05-14
江西建材(2018年4期)2018-04-10
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
油气田地面工程(2014年7期)2014-03-21
