
基于无人船声呐遥测系统的水利工程检测应用
2022-11-23 06:03周根富陈擎宇武闻天
江苏水利 2022年11期
周根富,陈擎宇,武闻天
(江苏省水利防汛物资储备中心,江苏 南京 210029)
1 概述
水利工程经历长时间的运行,部分工程存在着质量、安全隐患,由于这些隐患大部分在水下地段,常规的检测手段往往不能及时发现,相关工程维护工作任务繁重,劳动强度较高,危险系数较大,迫切需要运用先进的水利工程水下检测设备与方法来检测。随着科技的发展,水下测量技术和模式也正面临着巨大变化,无人船测量的应用能较好地解决人工驾驶测量船艇不足等问题。无人测量船系统集成了声学探测、RTK定位、GIS与遥感、自动控制、无线数据通讯、计算机软件等众多先进技术,自动化程度高,操作简单易学。有效提高了水下测量精度,补充了测量范围,同时减少了测量人员的劳动强度,降低了安全风险,具有安全、便捷、经济、快速测图的优势,只需要少量的工程人员就可以不间断地完成长河段工程安全检查工作,无人船搭载各类测量设备能完成航道多项测量任务[1-2]。通过研发的Sonarpro多源(多期)数据软件可实现对XTF、JPG、TIF、TIFF格式的侧扫声呐原始数据进行标绘等操作,模拟现实环境下的一系列操作,对侧扫声呐数据处理有极大的促进意义。
2 系统组成及原理
基于无人船声呐遥测系统由岸基人工作业子系统、无人测量船组成,其中无人测量船配置有RTK-GPS、单波束测深声呐、侧扫声呐3种主要的测量设备,结合岸基人工作业子系统的无人船自主巡航及无线数据通信控制软件及RTK-GPS测量软件、侧扫声呐软件、测深声呐软件、Sonarpro数据处理软件等应用软件,实现自动化水下险情测量及多源数据处理[3-4]。
2.1 系统配置
无人测量船由水面机器人船体、主控系统(含主控模块及主控嵌入式软件)、供电系统、船载RF无线通信系统及测量设备(RTK-GPS、侧扫声呐、测深声呐)构成。建成的局域网络可实现远程操控船体以及无线数据传输一体化系统(图1)。该子系统设计具备测量设备集成度高、应急响应速度快、水情适应性强等3个特点,以适应水利工程维护单位的应急管理需求。
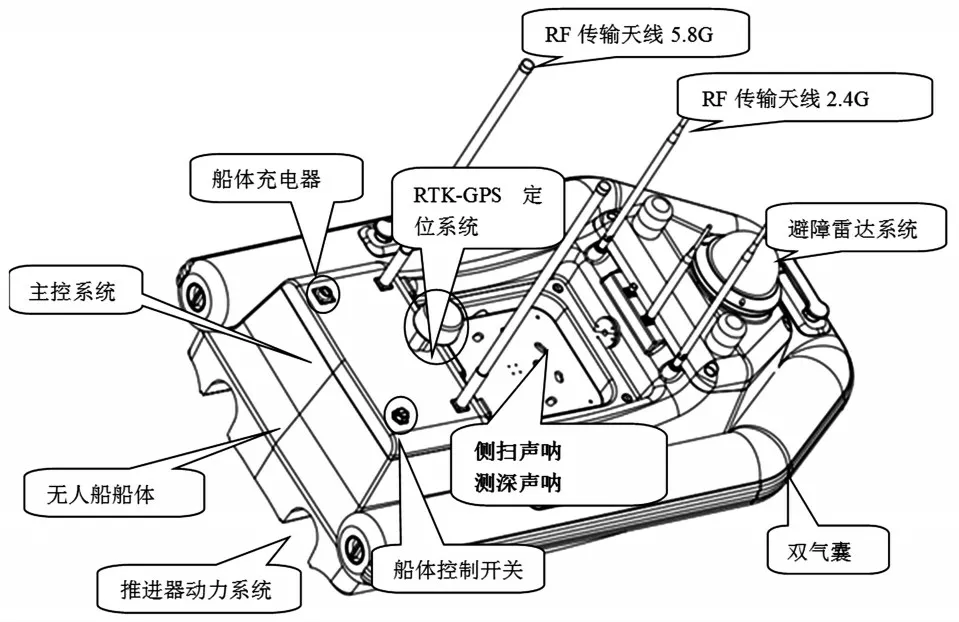
图1 无人测量船主要设备布局
2.2 作业流程
在确定作业任务的水面区域后,系统的作业流程分为:作业规划、水面作业、数据处理3个阶段。
2.2.1 作业规划阶段
主要是岸基人工作业子系统为自动化测量任务进行无人船航路的路径规划,基本原理是基于卫星影像地图的可视化航线规划,下阶段再由无人船控制系统基于RTK-GPS与地图匹配技术自动执行测量任务。
2.2.2 水面作业阶段
水面作业前通过无人船搭载的RTK-GPS测量点高程值,换算得到水面高程数据。无人测量船接受岸基系统的指令并执行,通过无人船主控系统完成全部的航路任务和测量任务,主控系统控制下根据船载RTK-GPS实时高频定位数据,保持高精度的航路规划的路径导航行进。
船载的测量设备(测深声呐、侧扫声呐)通过无人测量船的RF无线通信将测深声呐与侧扫声呐数据实时回传岸基人工作业子系统,经测深声呐软件、侧扫声呐软件进行数据记录及实时的浏览。侧扫声呐图像应用深度学习技术或人工进行识别和判断,软件标注水利险情位置后,可进行水利险情目标探测扫描,得到目标的大地坐标系位置、水深、长度、宽度、高度等要素。
2.2.3 数据处理阶段
侧扫声呐图像的水利险情的业务判读及位置标记。水利行业内无相应的数据处理应用软件,通过研发Sonarpro多源(多期)数据软件结合卫星影像地图、水下DEM等数据,进行侧扫声呐图像的测量、标记等操作,并最终生成文本报告。
2.3 基本原理
2.3.1 水利险情目标位置测定
本系统采用的是单波束测深声呐,无人测量船行驶至水利险情目标水面垂直位置,测深声呐获取水下目标点的深度,依据RTK-GPS测量点的平面坐标和高程值,可以计算获得水利险情目标点的高程数据。无人测量船易受到风浪的干扰,导致测量存在一定的误差值,所以作业人员在测量前应观察天气情况。
2.3.2 水利险情目标图像采集与识别
水利险情目标图像采集使用的是侧扫声呐左右各安装1条换能器线阵,首先发射短促的声脉冲,声波按球面波方式向外传播,碰到水中物体会产生散射,其中的反向散射波(也叫回波)会按原传播路线返回换能器并被接收,经换能器转换成一系列电脉冲。将每个发射周期的接收数据纵向排列,显示在显示器上,就构成了二维水底地貌声图。声图平面和水底平面成逐点映射关系,声图的亮度包涵了水底的特征。在完成声图采集后,基于Sonarpro多源(多期)数据软件对水利险情目标的性质及参数进行分析,再结合水下DEM描述的基本特点进行现状描述。
3 关键技术研究
无人船自动测量平台作业过程是岸基作业人员通过无人船导航控制软件和声呐数据采集软件,对无人测量船及测量设备(侧扫声呐仪、测深声呐仪)进行作业协同控制,由无人测量船自动方式或人工遥控航行,通过岸基测量人员计算机管理方式完成水下测量数据采集任务。
无人船自动测量平台水下工程检测任务中,无人船自动测量平台负责完成测量任务规划与测量数据采集处理,Sonarpro软件负责完成测量数据分析与报告。任务规划的无人船巡检任务自动规划,数据采集处理的水下地形地貌精细重建,险情及障碍识别,水下安全检测数据挖掘是无人船自动测量平台的关键技术(图2)。

图2 无人船自动测量平台的关键技术
3.1 无人船巡检航路自动规划
无人船航路规划是指在静态和动态障碍物并存的工作环境中,寻找一条从已知起点到目标满足一定评价标准的航行路径,使水面无人艇在航行过程中能安全可靠地避开所有障碍物。在整体地形测量、定点测量2种不同应用条件下,无人船的航路规划应遵循不同的要求。在开始进行水下安全检测前,先利用历史数据规划生成整个任务的航路。
航路分为2个部分:一是对巡检区域进行范围的全覆盖,形成河道、湖泊、提防、水库以及水电设施水下地形、地貌、工程水下结构等整体情况的掌握;二是无人船应尽快启动并到达任务区域进行遥测分析,同时可在不同任务区域之间进行转场。
本研究基于粒子群算法进行全局航路规划,并运用势场法生成局部避障路径,实现各种业务条件下无人船作业任务的快速自动规划,自主避障运行。
3.1.1 基于粒子群的全局航路规划
无人船全局路径是预先规划形成的,若A区、B区为2个探测作业区域,区域内部代表覆盖区域进行数据采集的S形网状航路,出发点与A区,A区与B区之间的连线,代表无人船从出发点到A区,从A区到B区的航路。因此,无人船的航路规划分为两部分,一部分是区域覆盖路径规划,另一部分是点对点的航路规划。全局路径规划分为3个步骤,即航行区域栅格化,覆盖区域的S形网格生成,任务区域到达路径生成。
3.1.2 基于势场法的局部避障路径生成
无人船的路径是多端折线拟合形成的,无人船在水面行驶时,其全局航路是根据历史水下地形数据生成的,一旦水下情况发生变化,可能遇到搁浅、碰撞等偶发危险状况,无人船可通过声呐回波信号预先掌握,并做出应急处理,以躲避障碍物。同时,无人船在躲避障碍物后,应再次靠近既定航线,继续完成原先规划的工作。
3.2 水下地形地貌精细重建
3.2.1 实时误差校正技术
通过声呐进行水下地形测量,其主要误差来源有声速误差、位置误差、波束干扰误差,实时误差校正技术通过声速误差校正、船体姿态误差校正以及波束积累对测量误差进行校正。
3.2.2 快速图像特征匹配
无人船的水下测距设备包括多种测距设备,当形成水下地形时,不但需要对点云进行正射矫正,还需要对多源数据进行融合配准、镶嵌,方可形成水下三维地形。同一位置多次测量的波束宽度、测距范围、成像方位、回波强度也存在明显差异,但经正射校正后的周边总体地形起伏是基本一致的。
因此,图像特征的选择必须具备旋转不变性、光照不变性以及尺度不变性。此外,图像特征点数量众多,镶嵌计算量复杂,很难满足实时运算的要求。针对以上问题,本文采用了特征筛选的方法,综合运用图像区域二值化(LBP)纹理特征与加速健壮特征(SURF),优化了特征点提取和匹配过程。在采用加速分块特征检测(FAST)算法提取角点的基础上,先采用LBP特征对备选特征点进行粗匹配,再提取SURF进行精细匹配,通过2次筛选有效降低了后续特征提取的备选点数量。图像配准的主要过程如图3。
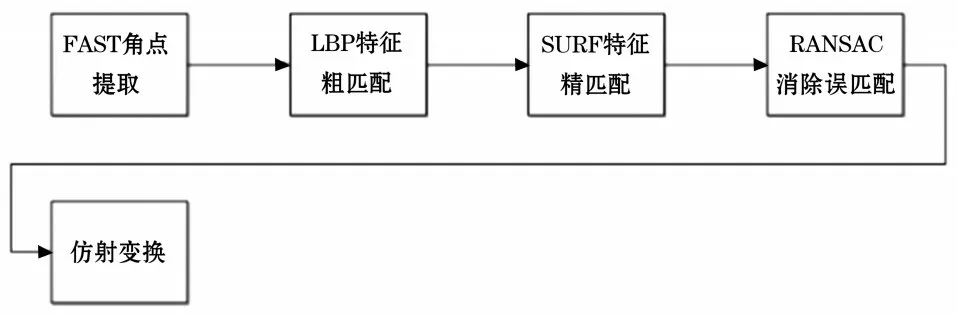
图3 图像配准的主要过程
3.3 险情及障碍识别
水下工程设施检测面临数据量大,分析处理难度高等问题,传统的无人船声呐系统一般采用“实时存储、后期分析”的模式,随着无人船及传感器数量的增多,巡检覆盖面的增大,完全依赖后期分析的模式已无以为继,必须引入自动处理能力,通过人工智能手段辅助识别漏洞、冲塌、裂缝等水下工程险情,或是违建、礁石、沉物、植物等水下障碍物,快速获取险情位置、状况,为抢修争取时间,同时大量减少维护人员工作量。
本应用研究借鉴RCNN的基本思想,采用图像边缘检测提取声呐回波图中可能存在水下险情及障碍物的区域,用以替代RCNN中Region Proposal的相关功能,并对现有RCNN系列深度神经网络结构进行了改进。针对水下声呐目标的特点进行优化,能够大幅度提高卷积神经网络的运行速度,降低后端处理负担,提高实时险情、障碍识别能力。
由于特定类别的声呐图像可能难以获得,本研究采用数据增强的方法对训练样本进行扩充,主要方法包括目标旋转、添加噪声、图像缩放、区域截取,几种方法可以联合使用,数个成像图像可扩充至成百上千个样本,从而大量提升了训练数据规模。
4 数据处理软件及成果分析
Sonarpro软件从侧扫声呐数据的导入、标绘、信息查询、导出等模块均为自主开发,对图像可以进行深入细致的处理,既包含当今主流的图像处理功能,又能够满足不同用户的需求。
整个数据处理软件所有模块的关键技术和算法,数据处理部分采用了多任务、多线程的工作模式,可以最大程度地利用现在多核处理器的优势,无论是程序运行速度还是系统的稳定性都能满足企业级应用。系统整体性能稳定,支持多核心处理器并行计算,对内存管理和使用的效率高,占用系统资源少,能够满足现阶段的大规模数据处理的应用。
数据处理软件是用于读取声呐测量设备获取的水底及堤坝数据,提供可视化数据读取窗口、图示标注工具,协助用户在风险点做出标注。提供标注信息导出工具,可将测声数据转换为Tiff格式图片,可将标注数据导出供GIS在对应风险点位置显示,可将标注信息导出生成Word格式文档。数据处理软件功能结构如图4。
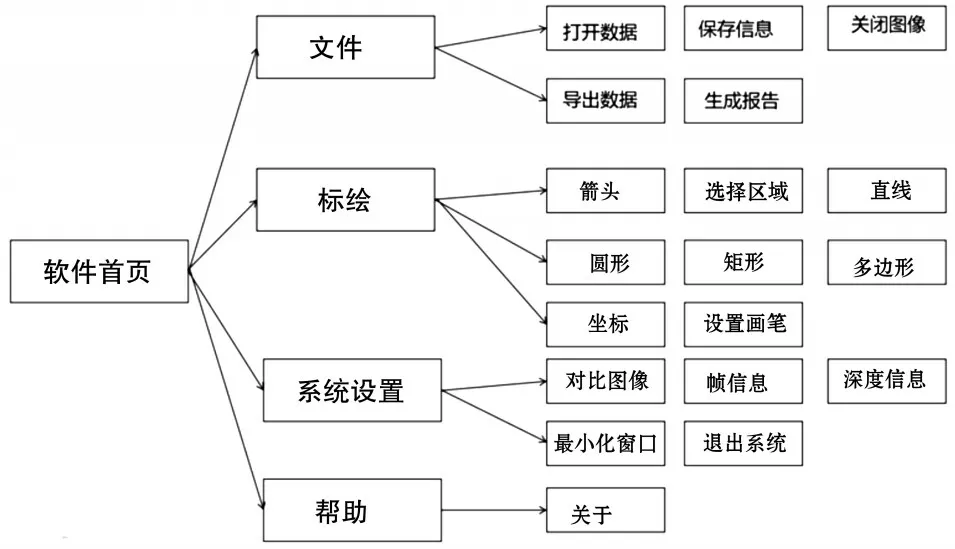
图4 数据处理软件功能结构
5 结语
随着科技发展与技术更新,工程水下检测方式与工作管理模式也在不断变化。无人船技术具有小巧灵活、智能化程度高、功能齐全、安全性能高等优势,极大降低操作人员的劳动强度和危险程度,可应用于水利工程水下检测及工程安全维护管理工作中。随着无人船技术更加成熟,使用成本更低,在工程水下检测中的广泛应用将产生巨大的社会效益和经济效益。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
舰船科学技术(2022年11期)2022-07-15
散文诗世界(2021年11期)2021-11-30
火力与指挥控制(2020年2期)2020-04-02
弹道学报(2019年4期)2020-01-10
海军航空大学学报(2019年1期)2019-04-29
红领巾·萌芽(2019年3期)2019-04-18
红领巾·萌芽(2019年2期)2019-04-18
弹道学报(2018年4期)2019-01-05
