
移动消毒防疫机器人设计与导航实现
2022-11-23 02:08秦涛任鹏温景阳石孝兰夏铭
机床与液压 2022年21期
秦涛,任鹏,温景阳,石孝兰,夏铭
(1.湖北文理学院机械工程学院,湖北襄阳 441053;2.康复医学与康复工程技术襄阳市重点实验室,湖北襄阳 441053)
0 前言
新冠疫情的发生,使得消毒防疫的需求急剧上升。在疫情防控中,消毒防疫任务迫在眉睫。而消毒防疫机器人凭借其高效作业能力和自主定位导航等功能,既避免了交叉感染,也减轻了作业量[1-2]。据中国人工智能产业发展联盟(AIIA)提供的数据,疫情爆发初期,人工智能抗疫的案例就已经高达500多例[3]。因此,开展消毒防疫机器人的研究极具社会实用价值。
消毒防疫机器人在疫情期间的作用可分为三类:(1)辅助治疗。在隔离病房中,医护人员通过消毒防疫机器人与病人间接接触,在人机交互功能下,实时掌握病人病情;在消毒、自主定位和路径规划功能下,完成隔离病房的消毒和配送任务等;(2)区域防疫。在重点管控区域和人流量大的公共区域,通过定位与自主导航功能,消毒防疫机器人可自主移动到所有区域,完成消毒杀菌、体温检测、疫情播报和巡检探查等防疫任务,实现区域防疫任务的全覆盖;(3)日常服务。在一些人手不足或者人员不能轻易进去的地方,消毒防疫机器人可以提供配送等任务,如快递的无接触配送[4-6]。
丹麦 UVD Robots 公司研发的UV-C紫外线消毒防疫机器人[7]主要应用于常规的清洁消毒,目的是阻止病菌在环境中的传播,其主要特点是小巧灵活,可轻松通过较窄的通道。VYSHNAVI 等[8]开发了一种自动控制开关紫外线的消毒机器人,当检测到活体时,机器人就会停止工作;当活体离开消毒区域时,再次开启机器人的工作模式。韩国研究人员开发了一种自主导航机器人[9],能够识别具有高污染概率的物体和位置,并能够提供量化的灭菌效果。上海擎朗智能科技有限公司开发的移动消毒防疫机器人[10]搭载了自主研发的全新复合型定位导航方案,无需人员值守,具有定向消毒功能,可针对指定位置进行消毒。澳门大学科技学院的研究人员设计与开发了一种新型经济高效的室内自主移动消毒机器人[11],它集成了轮式移动机器人平台和过氧化氢雾化装置,可在复杂的室内环境中完成自主消毒防疫任务。消毒模块能够将过氧化氢液体转化为微米大小的干雾,进行有效的空间消毒。中山大学第三附属医院研制了一种应用于新型冠状病毒肺炎的智能消毒机器人[12],在消毒模式上集成了基本消毒模式和结合多种消毒模式的功能,可满足医院多环境中的各种消毒需求。
综上所述,加强消毒防疫机器人的研发与推动工作,不仅能在疫情防控中提供助力,而且可推动我国机器人产业的快速可持续发展。因此,本文作者设计一款具有减振缓冲装置的移动消毒防疫机器人,集成紫外线和喷雾消毒的消毒模块可自动升降,以满足不同高度区域的消毒需求。
1 移动消毒防疫机器人的总体设计
1.1 移动消毒防疫机器人需求分析
在结构方面,移动消毒防疫机器人整体应具备稳定的结构,移动底盘的设计要具备抗倾覆能力、减振功能和全向移动功能,以便移动消毒防疫机器人负载运行、爬坡和越障时能始终保持结构稳定。在消毒方式上,在多功能集成的同时还需要根据人机共存条件和机器人结构层面进行综合考虑,比如,紫外线消毒需要在无人环境下工作。在功能上,移动消毒防疫机器人需具备室内定位和自主导航功能。在软硬件配置方面,移动消毒防疫机器人需具备和需求相匹配的软硬件,在经济实用的前提下,尽可能提高硬件配置。
1.2 移动消毒防疫机器人结构设计
1.2.1 移动消毒防疫机器人总体方案
基于前述需求分析,设计一款应用于室内的移动消毒防疫机器人,如图1所示。消毒防疫机器人分为移动底盘和消毒模块两部分。通过移动底盘将消毒防疫机器人移动到待消毒区域,当待消毒区域没有人时,通过紫外线灯进行大范围消毒,以便快速对待消毒区域进行消毒;当待消毒区域内有人时,通过喷雾消毒方式进行消毒;喷雾消毒方式与紫外线消毒方式配合,使消毒防疫机器人能够适应不同情况,有助于提高消毒防疫机器人的适用性。
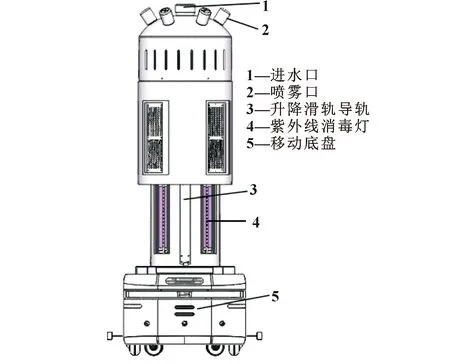
图1 移动消毒防疫机器人整体结构
1.2.2 移动底盘结构设计
移动底盘如图2所示,包括主动轮、从动轮、减振缓冲装置、电源、激光雷达等主体部分。由于消毒防疫任务一般位于室内,对越障能力要求不高,因此选择较为常用的差分驱动方式,其主动轮分布在车体中心两侧。减振缓冲装置分布在机器人底盘两侧并与驱动轮平行,可消除车体运动时造成的大部分振动。在电源的选择上,根据工作需要选择合适的容量,以免电量不足,影响消毒防疫效率。激光雷达设计在车轮中心线的位置,以保证扫描范围尽可能大,且不被自身结构所遮挡,影响数据的观测。
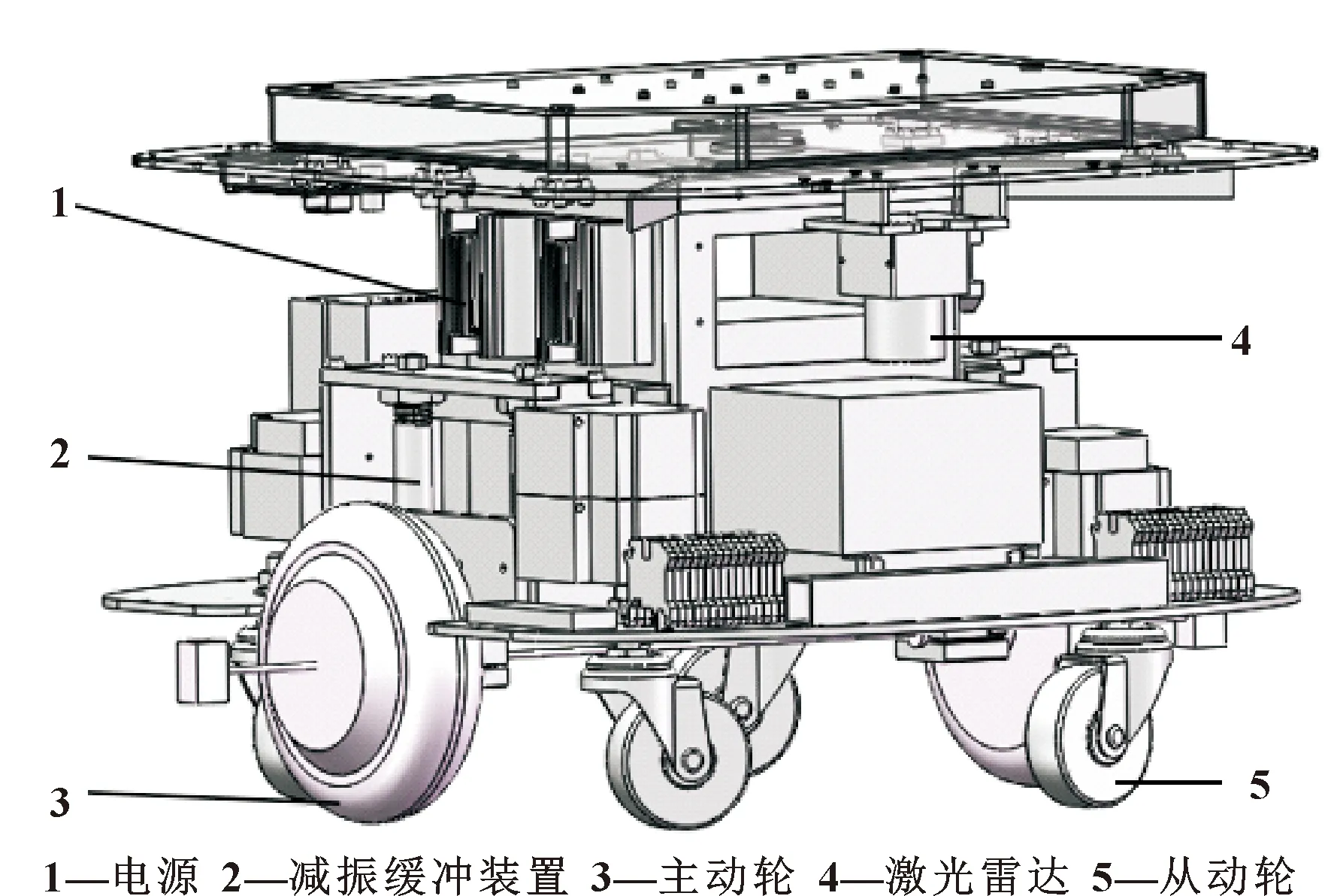
图2 移动底盘结构
根据消毒防疫需求,结合移动消毒防疫机器人工作环境,所设计的移动消毒防疫机器人底盘技术参数指标如表1所示。
where superscript U represents the upper wall,Dx is the spacing between two adjacent microphones,and J must be not less than 2N.Note that Eq.(7)includes both forward and backward acoustic modes,and superscript?has been omitted.
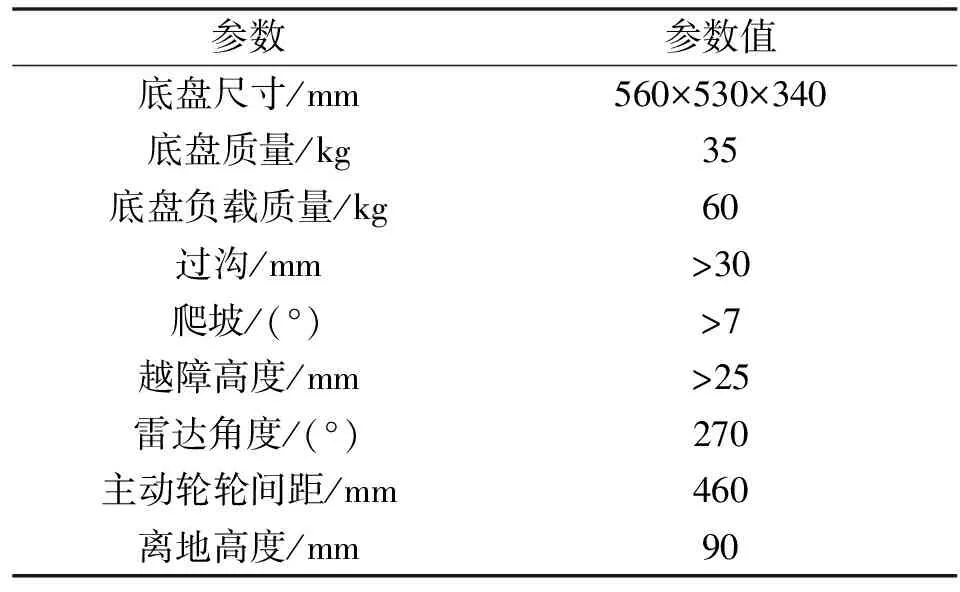
表1 移动底盘具备的基本技术指标
1.2.3 消毒模块设计
根据市场调研知,消毒模式面临着人机共存、消毒过于分散的问题。人机共存问题即移动消毒防疫机器人的紫外线消毒方式需要避开有人的环境,如果在人流量较大的环境中,就不应该选择紫外线消毒方式。移动消毒防疫机器人的消毒环境比较复杂时,喷雾消毒方式对空气中的消毒效果明显,但在一些具体的地方,如墙壁、门把手、座椅和天花板等人可直接接触或较高的地方,喷雾消毒的方式将难以满足要求。因此,消毒模块的设计需要具备可升降功能,使消毒作业的范围可以近距离覆盖室内较高位置。
基于消毒防疫任务中消毒彻底、不留死角和较高位置消毒的需求,设计紫外线和喷雾消毒功能相结合的消毒模块且可自动升降,如图1所示。消毒模块包括喷雾装置、紫外线消毒灯和升降机构。喷雾装置用于执行消毒液的喷雾消毒;紫外线消毒灯用于对环境进行紫外线消毒杀菌;升降机构用于喷雾装置的升降,使喷雾装置在室内较高的地方也能通过升降机构进行消毒,当工作环境中有人存在时,紫外线消毒灯可以隐藏于消毒模块内部,提高了消毒的便捷性和安全性。
1.3 移动消毒防疫机器人软件设计
1.3.1 多传感器融合定位框架设计
移动消毒防疫机器人的定位方式为自主定位,所以会受传感器性能的限制,导致定位精准度、鲁棒性差,从而影响整个系统的可靠性。而多传感器融合定位是解决室内定位问题的主流方案,目前研究较多的有激光雷达+惯性单元、视觉+惯性单元、激光雷达+视觉等融合定位方案[13]。当前,激光雷达技术已经非常成熟,而视觉定位技术还处于发展初期阶段,为保证移动消毒防疫机器人在技术上的稳定性,采用里程计、IMU和单线激光雷达相融合的技术方案,完成移动消毒防疫机器人的定位任务。
如图3所示,多传感器融合定位框架分为三部分:地图匹配定位系统、惯性导航系统和多传感器数据融合定位系统。地图匹配定位系统由激光雷达组成。
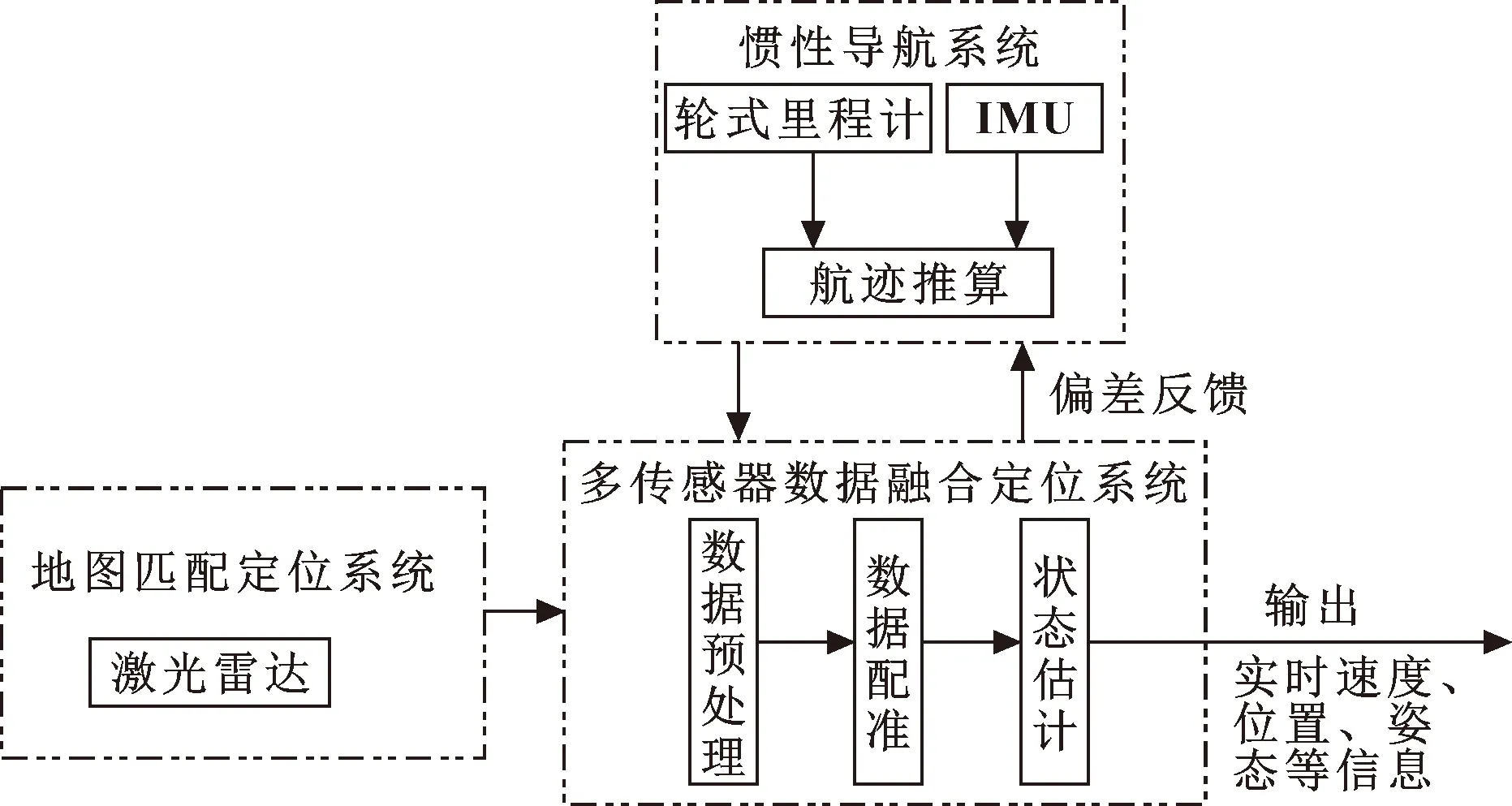
图3 多传感器融合定位框架
1.3.2 人机交互界面设计
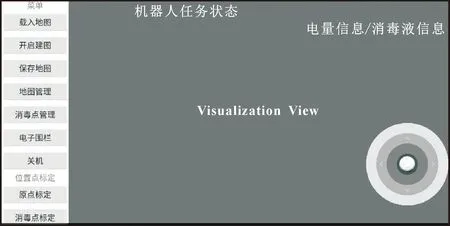
图4 APP主界面

图5 消毒管理界面
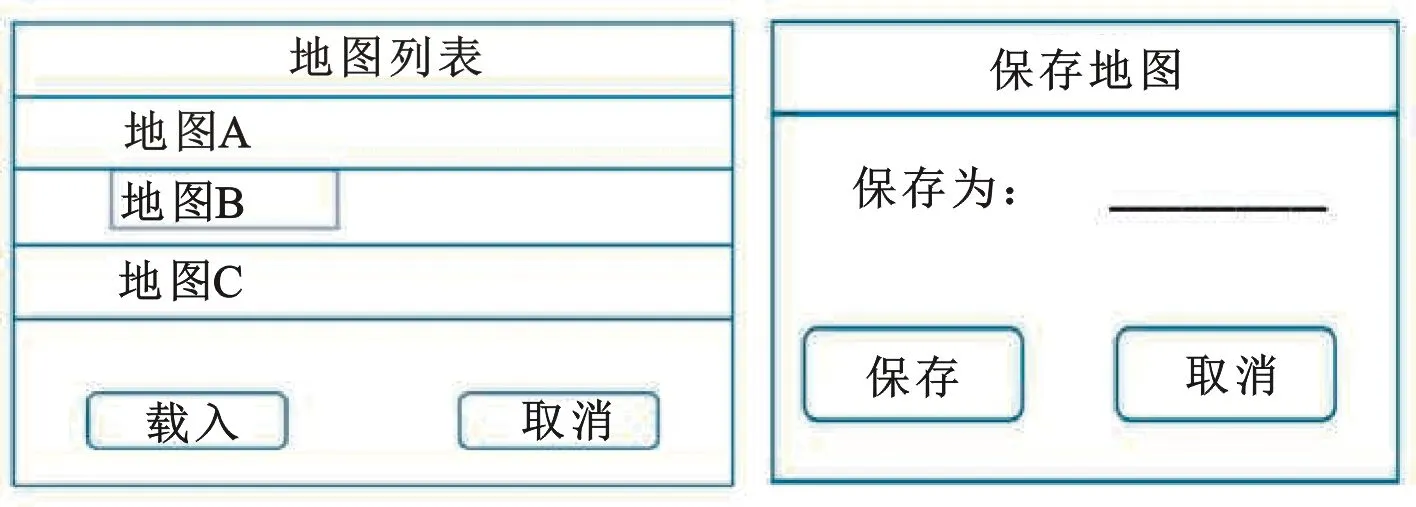
图6 地图载入界面
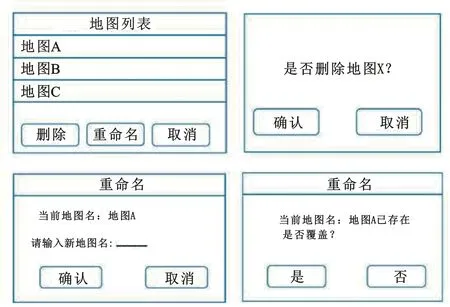
图7 地图管理界面
2 移动消毒防疫机器人运动学建模
基于速度的运动模型采用旋转和平移速度控制移动消毒防疫机器人运动,其原理是向驱动系统发送速度指令,实现机器人的运动控制,应用较多的驱动系统有同步驱动、阿克曼驱动和差分驱动[14]。本文作者采用的是差分驱动,其运动模型如图8所示。
设t-1 时刻,移动消毒防疫机器人的位姿为[xt-1,yt-1,θt-1]T,平移速度和旋转速度分别为vt-1、ωt-1。当移动消毒防疫机器人以点P为圆心、R为半径作圆周运动时,可计算圆心的位置[xc,yc]T:
(1)
经过时间Δt,可得t时刻移动消毒防疫机器人的位姿[xt,yt,θt]T,如公式(2)所示:
(2)
在t-1和t时刻,移动消毒防疫机器人的位姿和速度控制量的关系如公式(3)所示:
(3)
移动消毒防疫机器人的速度运动模型是指在有控制量和噪声干扰的情况下,机器人从上一时刻到当前时刻的位姿变化情况,其各种变量的定义如表2所示。
在忽略外部等因素的条件下,可用离散非线性方程表示移动消毒防疫机器人的速度运动模型,满足如下关系式:
X(t)=f[X(t-1),u(t)]+W(t)
(4)
f[X(t-1),u(t)]=
(5)
3 移动消毒防疫机器人自主导航仿真实验
3.1 移动消毒防疫机器人ROS框架
移动消毒机防疫器人装载了机器人操作系统(Robot Operating System,ROS),具有完整的实时定位与地图构建(Simultaneous Localization and Mapping,SLAM)框架[15]。ROS端模块软件部分根据功能实现分为硬件接口层、运动控制层、规划层和人机交互层,共4个软件层,如图9所示。硬件接口层主要完成硬件通信与控制,包括与驱动器、电源模块、激光雷达、IMU和深度相机等的通信与控制;运动控制层主要完成运动学控制与运动学计算、里程计推算等;规划层包括地图构建、自主导航定位等;人机交互层主要包括Rviz和遥控器手柄。该软件架构层级分明,模块间独立性较高,可以使移动消毒防疫机器人具备更多的扩展性,方便其他功能的开发。
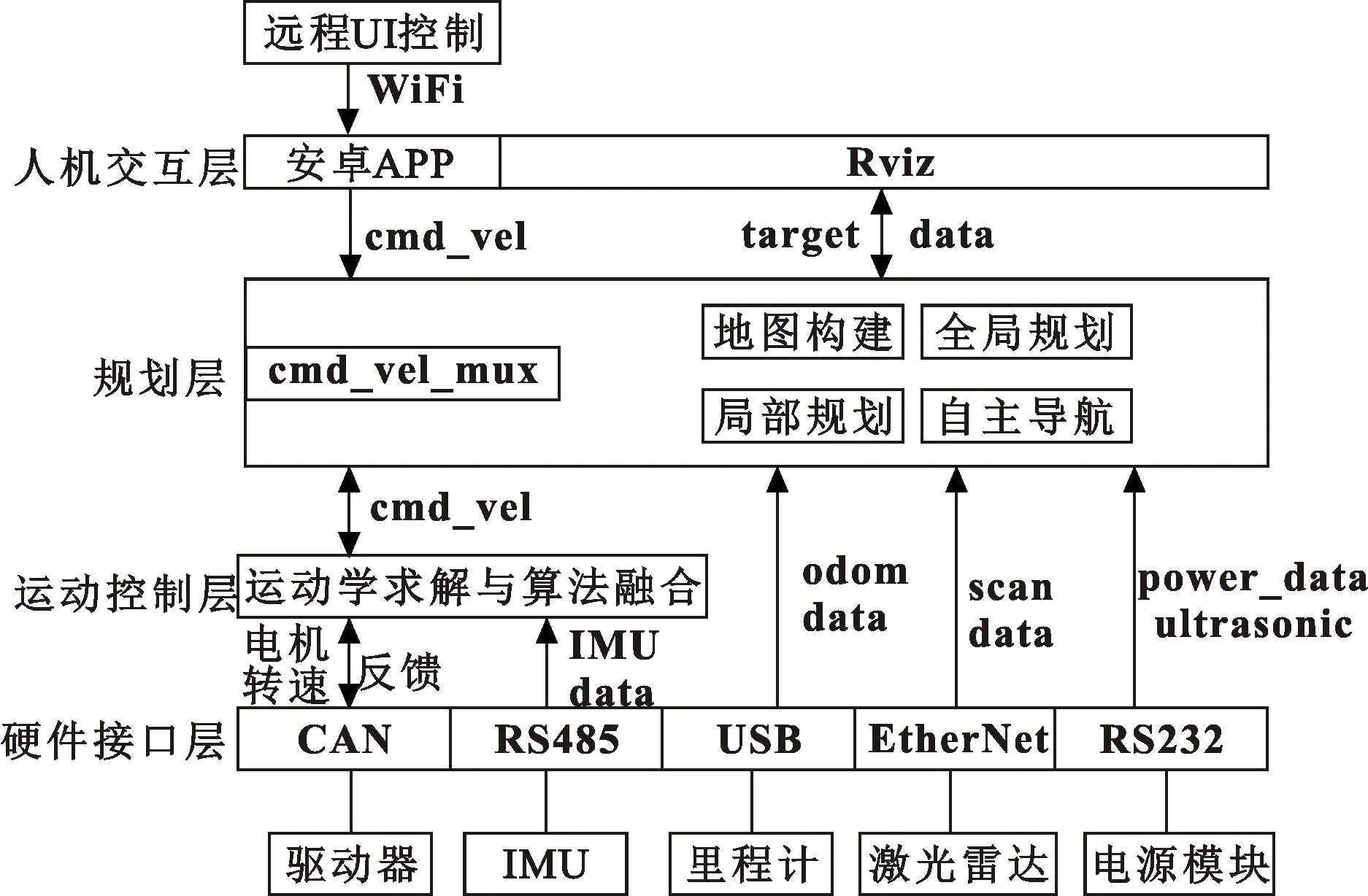
图9 ROS模块软件架构
3.2 移动消毒防疫机器人环境地图构建
为使移动消毒防疫机器人的应用环境更加贴近实际,基于防疫消毒任务的需求,还原疫情期间方舱医院隔离病房的设计布局,参照此布局设计移动消毒防疫机器人的运行场景,如图10所示,具体包括:起点、医护走廊、医护缓冲区、卫生间、病床、床头柜、配药区、消毒区、交叉缓冲区。在三维物理仿真平台 Gazebo下进行仿真环境模型搭建,如图11所示。机器人默认位置加载在蓝色的交叉缓冲区,图中蓝色的区域为激光雷达所扫描到的范围,各场景布局与图10相互对应。
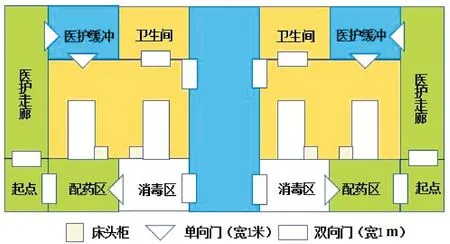
图10 SLAM地图构建路线

图11 Gazebo中仿真环境模型
采用Gmapping算法进行仿真实验,控制移动消毒防疫机器人按照路线行驶一圈,得出实验数据。移动消毒防疫机器人在Gazebo中的仿真建图过程如图12所示。机器人按照行驶路线行驶一周后的Gmapping建图结果如图13所示。从特征点识别情况看,Gmapping算法在建图过程中较为清晰地识别到特征点,建图效果较好。建图平面内轨迹跟踪结果如图14所示,可见移动消毒防疫机器人的轨迹较为清晰,是一条快封闭的圈形,说明定位信息比较精准。
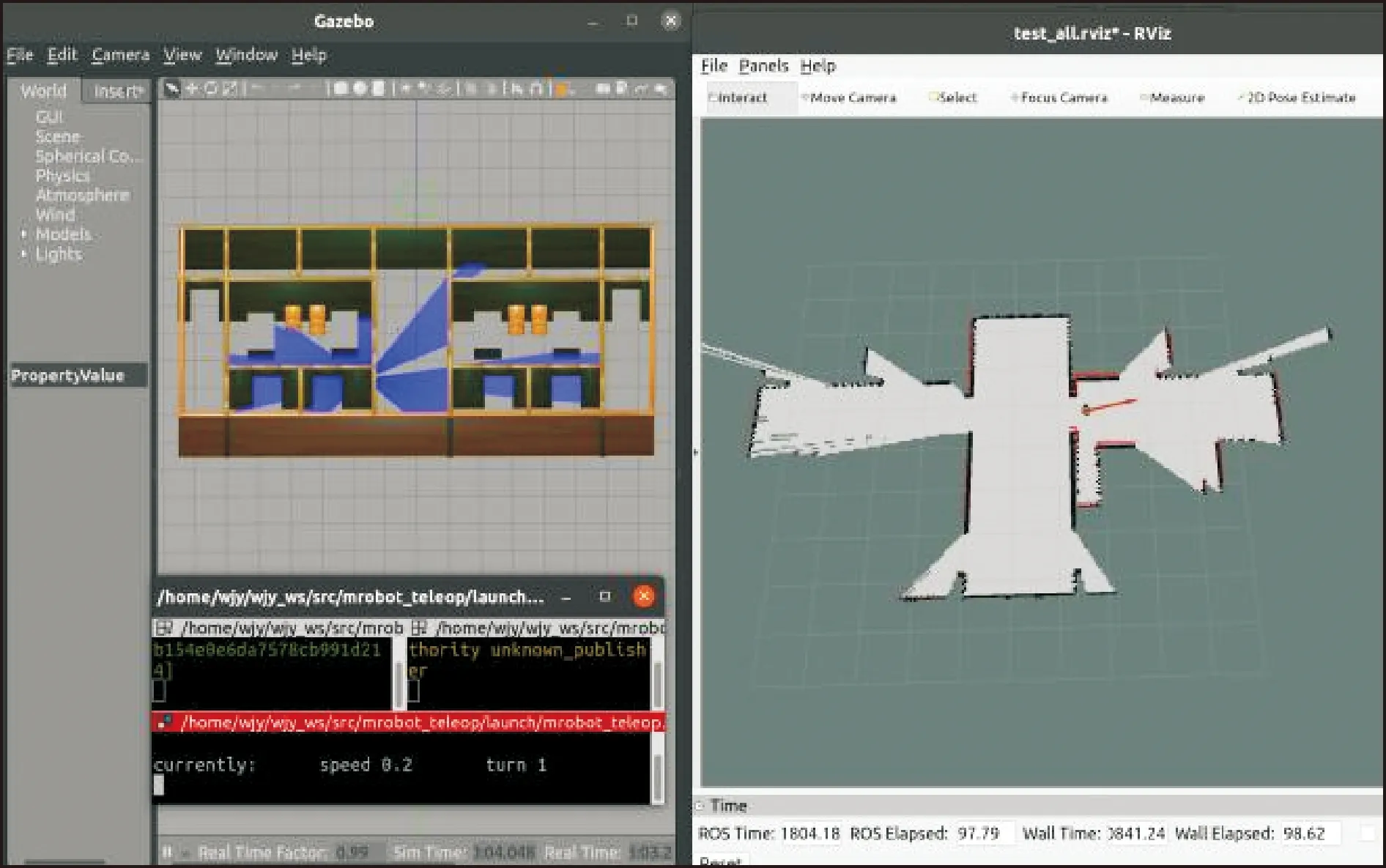
图12 Gmapping的仿真建图

图13 Gmapping建图结果
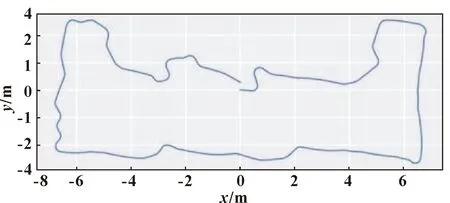
图14 建图平面内轨迹跟踪结果
3.3 移动消毒防疫机器人自主导航仿真实验
为验证自主导航系统的可行性,基于消毒防疫需求以及方舱医院的设计布局,开展移动消毒防疫机器人路径规划仿真实验,进一步应用 ROS中的Rviz 进行仿真模拟。消毒防疫需求包括消毒防疫机器人的行驶路径较短、与障碍物之间有一定的安全距离以及可以高效迅捷地前往指定地点完成消毒杀菌作业。仿真实验结果如图15所示,可知:机器人能完成导航任务,并成功绕开障碍物,到达目标点。
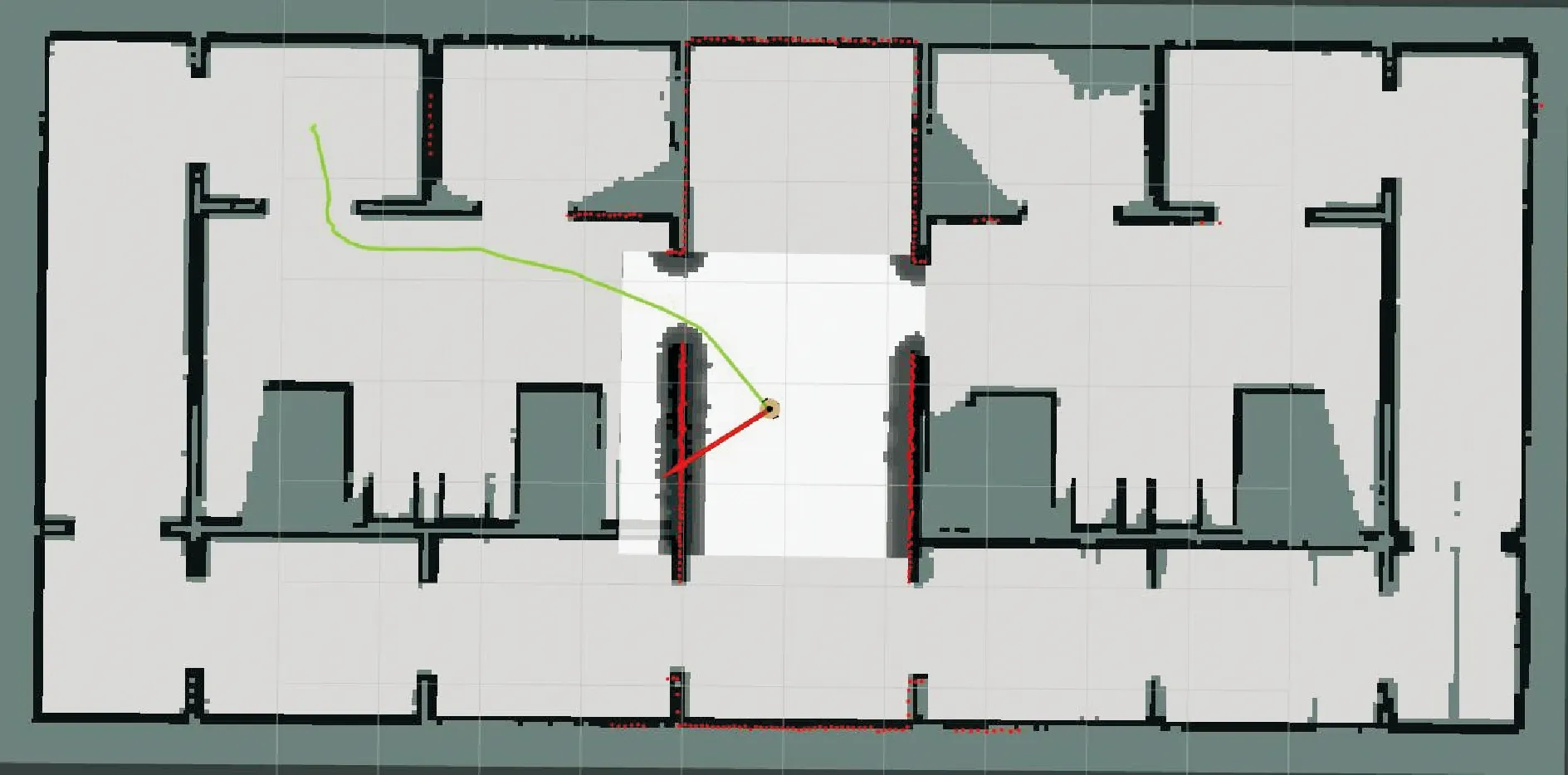
图15 机器人自主导航仿真结果
4 结语
为实现病房复杂室内空间消毒的绿色化和自动化,设计了一种具备紫外线消毒和喷洒雾状消毒功能的移动消毒防疫机器人,主要研究成果包括:
(1)基于消毒防疫的现实需求分析,提出了一种移动消毒防疫机器人结构方案,创新设计了机器人的移动底盘、消毒模块和交互控制系统的软硬件;
(2)以方舱医院为原型,设计搭建了消毒防疫机器人应用场景,基于ROS进行了移动消毒防疫机器人工作自主导航模拟,其路径基本位于通道中央,显示平滑且路径较短,满足移动消毒防疫机器人的基本需求。
猜你喜欢
保健医苑(2022年6期)2022-07-08
环球时报(2022-05-20)2022-05-20
防爆电机(2022年1期)2022-02-16
好日子(2021年8期)2021-11-04
故事作文·高年级(2021年5期)2021-06-01
动漫星空(兴趣百科)(2020年11期)2020-11-09
人大建设(2020年4期)2020-09-21
天天爱科学(2020年5期)2020-09-10
伙伴(2020年4期)2020-05-11
时代英语·高一(2019年1期)2019-03-13
