
两关节串联柔性手指末端输出力特性研究
2022-11-23 02:32刘洪波孟祥蕊祝燕
机床与液压 2022年21期
刘洪波,孟祥蕊,祝燕
(1.北华大学工程训练中心,吉林吉林 132021;2.北华大学护理学院,吉林吉林 132013)
0 前言
随着机器人和传感技术的发展,近年来国内外学者针对家庭服务和医疗训练的手指康复训练器展开了广泛研究[1-2]。手指康复训练器的驱动方式有很多,但各有利弊。其中,电机驱动型手指康复训练器在定位精度和响应速度方面具有较大优势,但本体结构柔顺性差,自身质量较大,难以实现轻量化;液压驱动型手指康复训练器在承载能力方面具有较大优势,其动力系统以高压油供应系统为主,但系统庞大复杂,成本较高,且存在泄漏危险;功能材料驱动型手指康复训练器可以直接驱动,无需中间传动结构,易于实现小型化,但其承载能力受材料自身属性制约[3-5]。气动人工肌肉具有结构简单、质轻、安全性高等优点,将其作为驱动部件应用到手指康复训练器中可以进一步提高人机交互的安全性,具有较好应用前景[6]。
为解决脑外伤和中风等引起手指运动功能缺失患者术后康复训练等问题,本文采作者用气动单向弯曲关节研制了两自由度柔性手指。首先阐述了手指的本体结构,然后建立了手指末端输出力的数学模型,最后采用仿真和实验相结合的方法对其末端输出力特性进行了研究。
1 手指结构组成
1.1 气动单向弯曲关节
关节本体由上/下端盖、约束环、乳胶管、弹簧钢板和气动接头等构成[7](图1)。压缩气体通入乳胶管的内腔后,外部约束环限制了胶管的径向膨胀,胶管只能够沿轴向变形,外加弹簧钢板的约束作用,关节朝着钢板一侧做近似圆弧状弯曲[8]。泄压后,在乳胶管以及弹簧钢板的自身弹性作用下,关节恢复到初始状态。除乳胶管外,关节其余零部件均为刚性件,在一定程度上提高了关节的整体刚度。
通过对关节静力学分析得到了双肌肉驱动型单向弯曲关节弯曲角度静态模型[9]为

(1)
式中:θ为手指弯曲角度;p为气压值;D1为乳胶管外径;D2为乳胶管内径;R为胶管中心线与弹簧钢板间的距离;E1为弹簧钢板的弹性模量;E2为乳胶管的弹性模量;b为钢板短边的长度;t为钢板的厚度;l0为关节的有效变形长度;μ为泊松比;I2为乳胶管的截面惯性矩。
在压缩气体作用下关节产生弯曲变形接触目标物体,受到物体阻碍后,关节不再主动变形,此时继续增加关节气压值至p+Δp(Δp为气压增量),关节产生输出力Fp夹紧物体。该输出力在关节上端盖上产生的力矩为τ[9-10]:
(2)
Fp=nΔpS′
(3)
τ=nΔpS′R
(4)
式中:Δl=Rθ为乳胶管伸长量;n为驱动肌肉数目。
1.2 柔性手指结构
如图2所示,柔性手指由基、远两关节串联组成。通过改变基、远两关节的气压值,不仅可以调整手指的弯曲角度,还可以控制手指末端与目标物体接触时的法向角度,进而精准控制手指与目标物体接触点的切向力和法向力。手指一侧布设弹簧钢板,增加了手指整体的横向刚度,同时也提高了手指夹持物体时的稳定性。
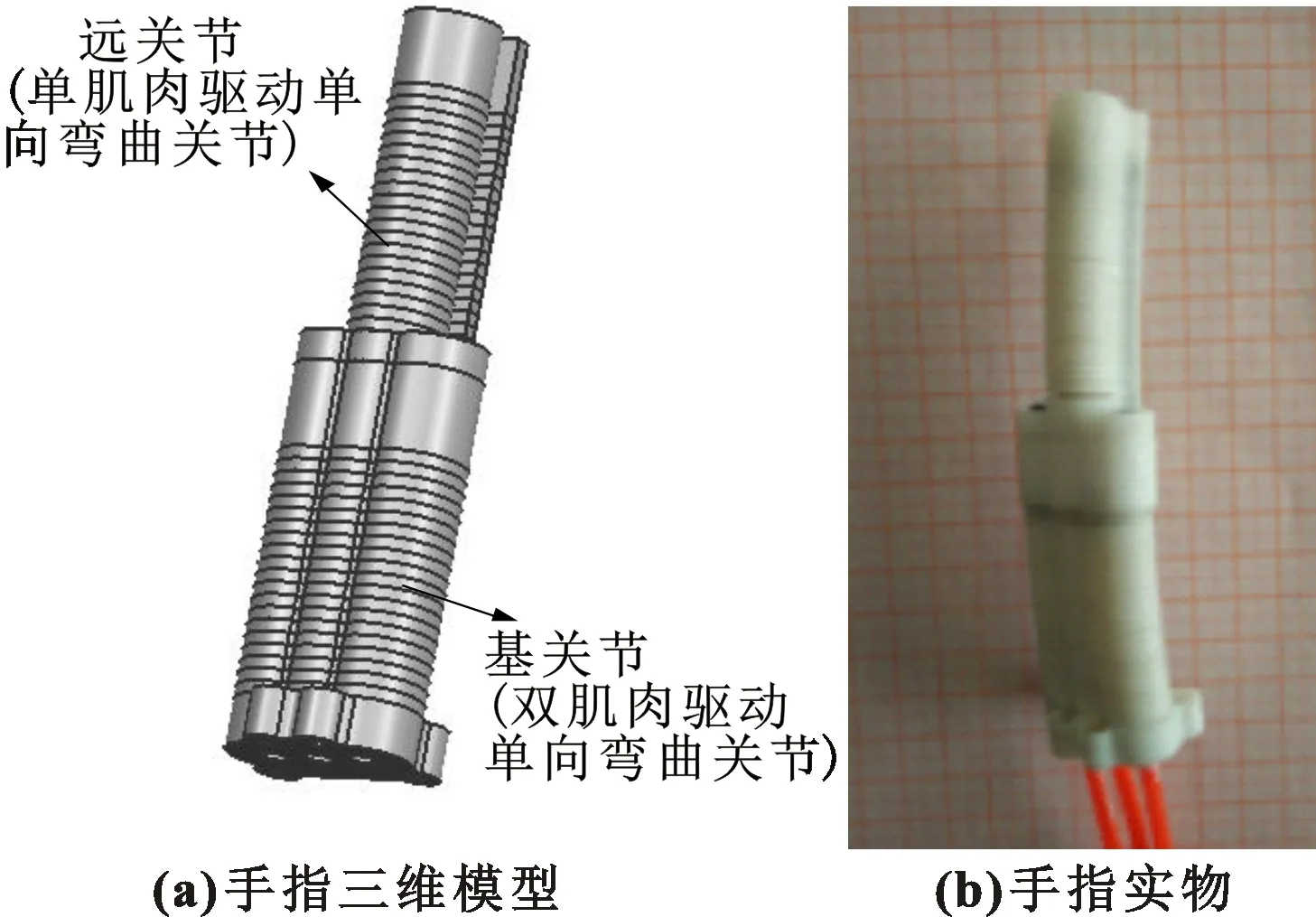
图2 柔性手指结构
2 手指末端输出力分析
2.1 手指正运动学方程

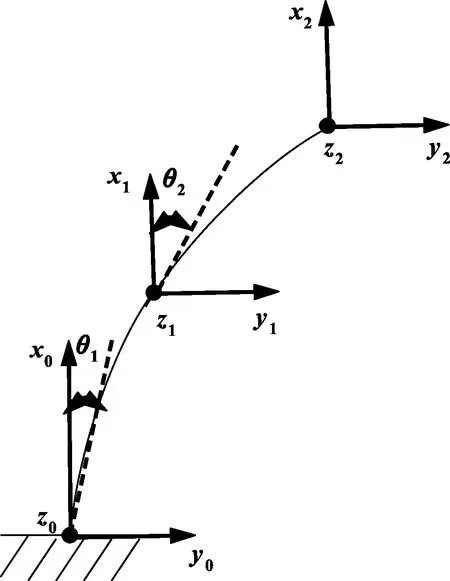
图3 手指坐标系
(5)
式中:l1和l2分别是基、远关节的长度;θ1和θ2分别是基、远关节的转角;第4列前3行元素表示手指末端在固定坐标系下的位置坐标,即
(6)
2.2 手指末端力雅克比矩阵
(7)
假设手指末端接触点受到外界力为
Fout=[FxFyMz]
(8)
联立式(7)和(8)得手指末端接触点承受的等效力矩τ1、τ2为
(9)
2.3 手指末端输出力
为了便于力学分析,对手指两关节输出力、力矩作如下定义:基关节的输出力、力矩分别为F1和τ1,远关节输出力、力矩分别为F2和τ2;两关节输出力作用在自身产生的力矩分别是τ11和τ22;远关节输出力F2对基关节产生的力矩为τ21。R1和R2分别为基、远关节胶管中心线与弹簧钢板间的距离(图4)。
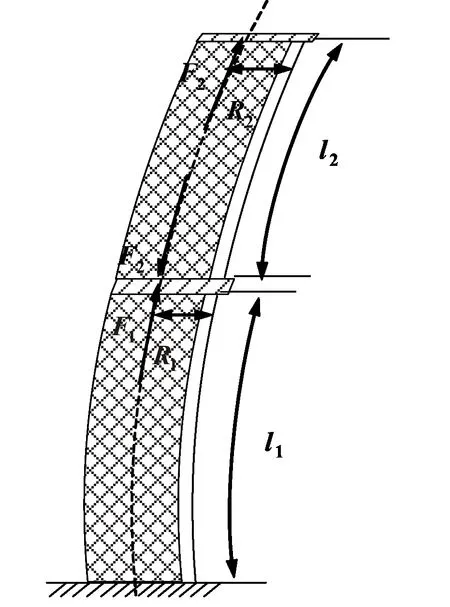
图4 手指受力分析
由力矩平衡方程得:
(10)
联立式(9)和(10)可获得基、远两关节输出力矩与其气压增量的映射关系:
(11)
式中:矩阵C表示基、远两关节输出力矩与其气压增量间的耦合关系。
根据手指末端输出力矩的平衡方程,即指端输出力矩与指端受到的外力矩相等,联立方程(9)和(11)得:
(12)
由方程(12)可知:当手指末端与目标物体的接触点固定不变时,指端输出力与两关节气压增量一一对应。
3 手指末端输出力仿真分析
根据公式(12)可知,手指结构参数一旦确定,其末端输出力只取决于基、远两关节气压增量值的大小。手指在弯曲起始时,气压增加幅度最大,此时手指末端输出力也就最大,反映出手指输出能力的强弱。因此通过MATLAB对手指处于弯曲起始位置时手指末端输出力进行仿真(手指结构参数如表1所示),得到末端切向输出力Fx、法向输出力Fy与基、远关节气压增量Δp1、Δp2之间的关系(图5、图6)。
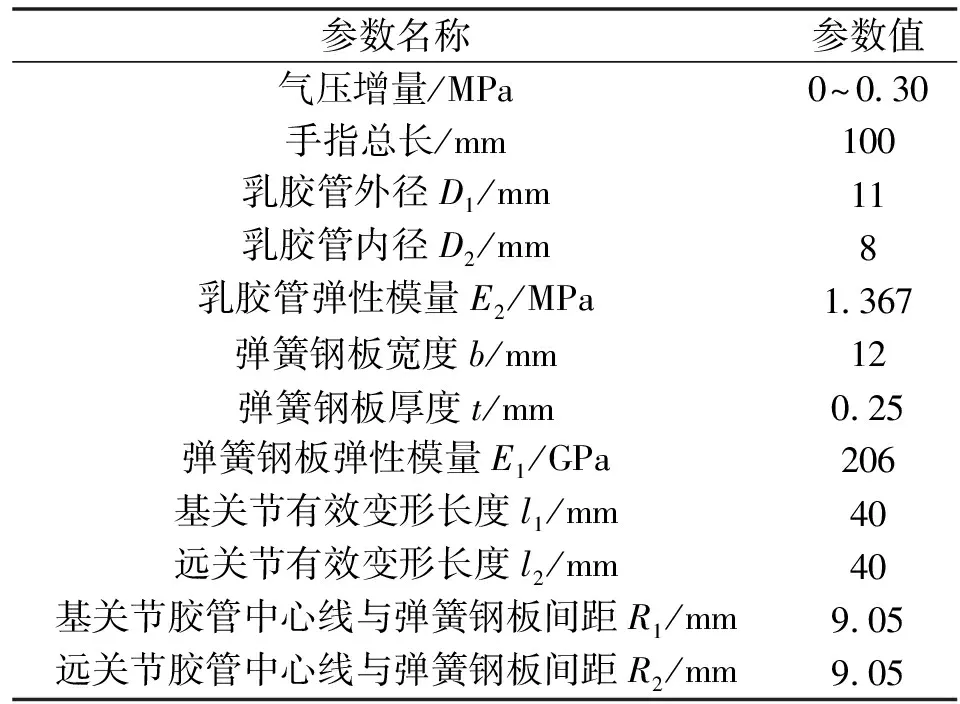
表1 手指结构参数
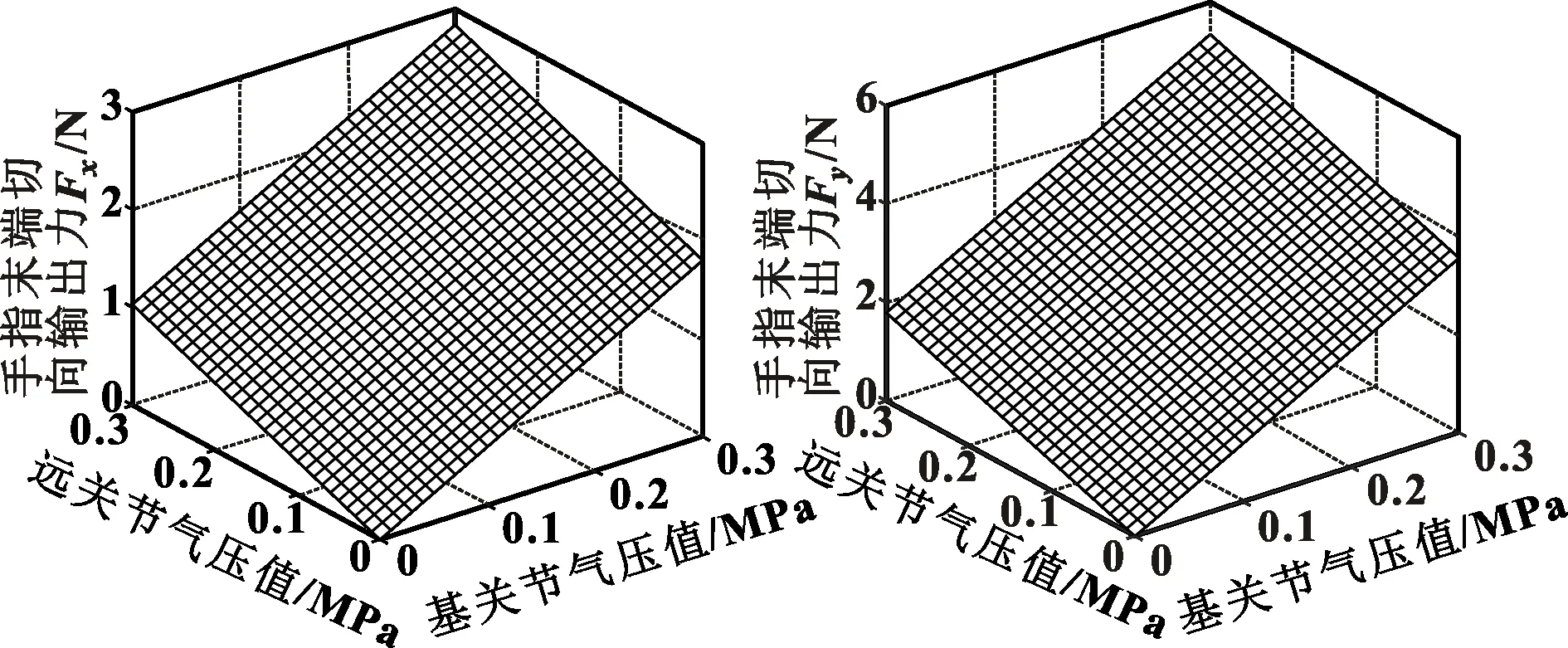
图5 手指末端切向输出力随气压增量变化曲面 图6 手指末端法向输出力随气压增量变化曲面
由图5与图6可知:随着基、远关节气压增量的增加,手指末端输出力Fx和Fy皆近似呈线性增大。因此,输出力Fx和Fy最大值出现在基、远气压增量均为0.30 MPa时,分别为2.87 N和5.34 N。
4 手指末端输出力实验
4.1 实验平台
手指末端法向输出力是机械手完成抓持物体的保障[11]。利用图7所示的力学实验平台,可测量手指在不同弯曲位置接触物体后末端输出力随气压增量的变化关系。其中,精密减压阀(型号:IR1000-01-R)可以调节手指中两关节内腔的气体压力,数显式推拉力计(型号:HF-100)用于测量不同气压增量下手指末端法向输出力。在实验过程中,将手指下端固定,通过减压阀调节气压值,通过XY移动滑台控制数显式推拉力计顶端与手指末端接触后,再次提高气压值实现手指夹紧物体,并记录测力计上数值。为减少测量时的偶然误差,取5组平行实验的均值作为法向输出力有效值。图8是手指基、远两关节气压增量皆为0.30 MPa时末端法向输出力的测量图片。
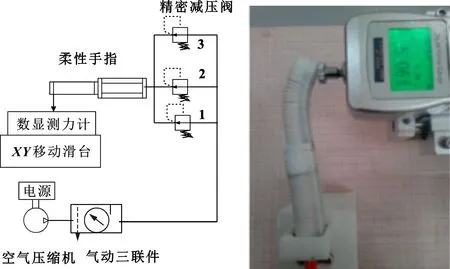
图7 手指末端输出力测量原理 图8 输出力测量图片
4.2 实验结果分析
利用MATLAB对手指弯曲起始位置下不同气压值的法向输出力数据进行处理,并与仿真数据进行对比。图9是不同驱动方式下手指末端法向输出力实验与仿真数据对比曲线。
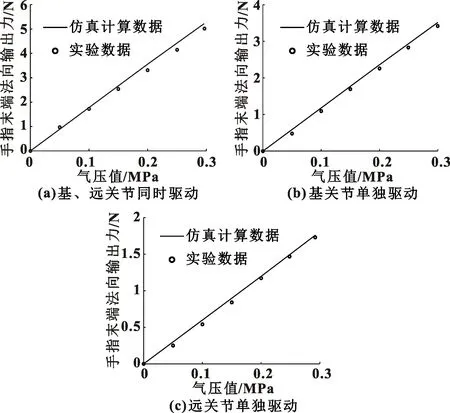
图9 不同驱动方式下手指末端法向输出力实验与仿真数据对比曲线
从图9可知:(1)不同驱动方式下手指末端法向输出力皆随着气压值的增加呈线性增大。(2)同气压下,基、远关节同时驱动时,手指末端法向输出力高于其他两种驱动方式;在0.30 MPa压力下,基、远关节同时驱动手指末端法向输出力达5.1 N。(3)手指末端法向输出力实验数据与仿真计算数据变化趋势一致,最大误差为6.9%,验证了建立手指输出力模型的正确性。
5 结论
首先介绍一种基于单向弯曲关节研制的两自由度柔性手指,然后根据柔性手指的形变规律,建立了手指正运动学方程,并在此基础上推导出手指末端输出力与气压增量之间的数学模型,最后通过实验和仿真对比验证了模型的准确性。仿真和实验结果还表明:当手指弯曲角度及指端位置确定后,输出力随手指内两关节气压增量的增加呈线性增大,通过调节两关节内气压增量的大小就可以准确控制手指末端输出力。综上所述,基于该柔性手指设计的手功能康复训练器输出力可控性较好,可辅助患者术后进行康复训练和抓取一些日常生活用品。
猜你喜欢
今日农业(2022年14期)2022-09-15
保健与生活(2022年11期)2022-06-09
北京航空航天大学学报(2022年5期)2022-06-06
财会月刊·下半月(2022年4期)2022-04-25
当代陕西(2022年6期)2022-04-19
电脑报(2021年25期)2021-08-27
家庭医药(2021年6期)2021-07-23
老年博览·上半月(2021年6期)2021-07-01
北京理工大学学报(2019年1期)2019-02-22
妇女生活(2019年1期)2019-01-17
