
大跨度铁路连续钢桁梁预拱度设置研究
2022-11-21 07:57:56林焕杰
四川水泥 2022年11期
林焕杰
(华南理工大学土木与交通学院,广东 广州 510641))
0 引言
目前桥梁理论预拱度的计算方法较明确,一般按规范规定的恒载加上1/2 活载引起的挠度值取反值得到[1]。大跨度钢桁梁桥一般通过改变上弦杆长度进行预拱度设置。对于简支钢桁梁桥,其预拱度设置较方便,一般按仅改变上弦杆长度而保持下弦杆和腹杆长度不变的方法进行设置,且各上弦杆长度伸缩调整值一致,通过不断试算得到合适的上弦杆拼接缝值。对于连续钢桁梁桥,在中间墩支点位置应设置反向曲线保证相邻跨预拱连接平顺,其上弦杆长度伸缩调整值一般不一致且同时存在正负值,部分上弦杆长度甚至可能无需改变而且支点处还需要改变腹杆长度。
钢桁梁桥采用的传统起拱方法一般有矩形分块起拱法、三角形分块起拱法、大梯形分块起拱法、小梯形分块起拱法[2]。这几种方法都避免不了需要多次的人工试算才能得到处于合理范围的厂设预拱度,计算过程较为繁琐。升降温法同样是一种求解杆件长度调整值以设置预拱度的方法,通过对上弦杆施加特定的温度荷载使下弦节点产生与理论预拱度值相等的变形。在内部超静定结构中,施加温度荷载必然会在支点处产生附加反力,从而引起构件附加内力[3]。采用升降温法一般需要结合有限元计算各杆件单位调整量与支点反力、下弦杆竖向位移值的影响矩阵,当构件较多时,方程组求解的计算量是庞大的。因此本文将通过采用升降温法结合改进粒子群算法对杆件长度调整量进行计算,以找到一种快速、合理的钢桁梁起拱计算方法。
1 改进粒子群算法原理
1.1 粒子群优化算法基本原理
粒子群优化算法是一种基于鸟类觅食的仿生智能算法。其原理是鸟在觅食过程中,其初始位置及飞行方向是随机的,在飞行过程中鸟群进行信息共享,根据个体的经验及同伴的信息对自身的飞行速度及方向进行动态调整,最终逐步逼近食物[4]。基于此,粒子群算法可描述为:在D维搜索空间内有n个无质量及体积的粒子,每个粒子视为问题的一个解,第i个粒子的位置用向量表示,其飞行速度以向量vi=表示,根据人为确定的目标函数输出该粒子当前位置对应的适应度值,通过迭代进行适应度值的相互比较,从而得到个体最优位置pbesti=以 及 群 体 最 优 位 置gbest=各粒子根据自身历史最优位置以及群体最优位置来确定下一次飞行的速度,第k次迭代更新的速度及位置如下所示:

式中:w——惯性权重;
c1、c2——分别为个体学习因子和群体学习因子,学习因子不同,收敛速度也不同;
r1、r2——[0,1]范围内的均匀随机数;
一般根据实际项目对xi进行约束,有xmin≤xi≤xmax,粒子速度vi约束有vmin≤vi≤vmax。
1.2 基本粒子群算法的优化流程
(1)随机初始化粒子群,包括粒子初始位置和速度。
(2)根据目标函数计算每个粒子的适应度值。
(3)将种群个体当前适应度值和个体历史最优位置比较,若更优则更新为个体最优位置。
(4)将种群个体当前适应度值和全局所经历最优位置比较,若更优则更新为全局最优位置。
(5)根据式(1)和式(2)迭代更新粒子的速度和位置。
(6)若满足停止迭代的条件(通常是达到设置最大迭代次数或多代最优解均一致)则输出最优解;若不满足则转入步骤(2)继续进行。
基本粒子群算法是一种随机算法,存在收敛速度慢且局部搜索能力较弱,容易陷入局部最优等缺点[11],一般通过改进惯性权重来对粒子群算法进行改进。以线性权重为例,有以下关系:

式中:wmin——惯性权重最小值;
wmax——惯性权重最大值;
tmax——最大迭代次数;
t——当前迭代次数。
2 基于升降温法和改进粒子群算法的钢桁梁起拱计算
对于大跨度连续钢桁梁,以上弦杆单元温度荷载为施调向量,以下弦杆节点竖向位移及支点反力为受调向量。首先在Midas Civil中建立钢桁梁模型,并对上弦杆构件及支点附近斜腹杆分别添加单位温度荷载工况,提取相应的响应值组成影响矩阵。在改进粒子群算法中,以支点反力平方和最小为优化目标,下弦杆节点竖向位移为约束条件,即:
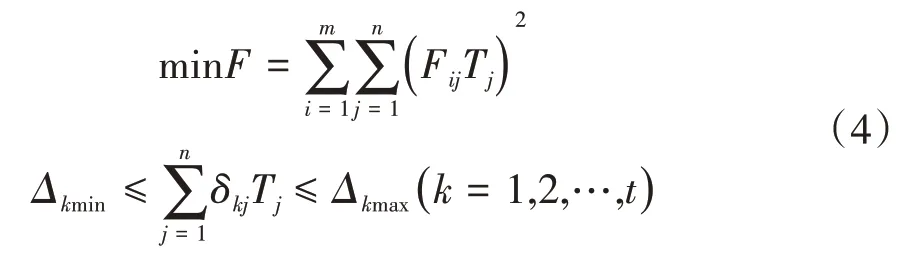
式中:m——支点数;
n——拟定调整的杆件数;
k——下弦杆节点数;
Fij——施调构件j在单位温度荷载作用下引起的支点i竖向反力响应值;
Tj——施调构件j单元的温度荷载变量;
δkj——施调构件j在单位温度荷载作用下引起的下弦杆节点竖向位移响应值;
Δkmin——下弦杆节点k竖向位移可行域下限值;
Δkmax——下弦杆节点k竖向位移可行域上限值。
在改进粒子群算法中,将下弦杆竖向位移约束条件通过罚函数的形式进行考虑,罚函数如下:

式中:c——惩罚因子,此处取c=105;
Δkmax——节点理论预拱度值+2mm;
Δkmin——节点理论预拱度值-2mm。
适应度函数为:
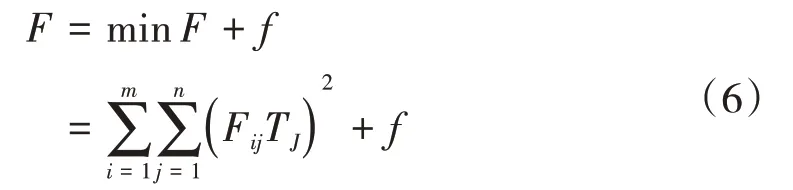
对上述目标函数进行最小值寻优,即可得到满足条件的杆件长度调整量。
3 算例分析
3.1 工程概况
南沙港铁路洪奇沥水道特大桥为跨径布置(138+2×360+138)m 的下承式钢桁梁柔性拱桥,两片主桁高16m,桁间距15m,宽跨比1/24,采用华伦式体系,节间长度为13.5m 和14m;拱肋矢高65.0m,矢跨比1/4.67,拱轴线为抛物线形。全桥共72 个节间,在钢桁梁的3个中支点处向边跨侧2 个节间和向中跨侧1 个节间布置下加劲,下加劲高16m。

图1 洪奇沥水道特大桥跨径布置图
3.2 有限元模型
在Midas Civil 中仅需建立钢桁梁有限元模型,构件采用梁单元模拟。从图2 可知,中墩239#墩为固定墩,2 个边主墩238#、240#墩及连接墩 237#、241#墩设为纵向活动横向固定墩,模型中将桥墩简化为在相应节点处采用一般支承并约束对应的平动或转动自由度来模拟。
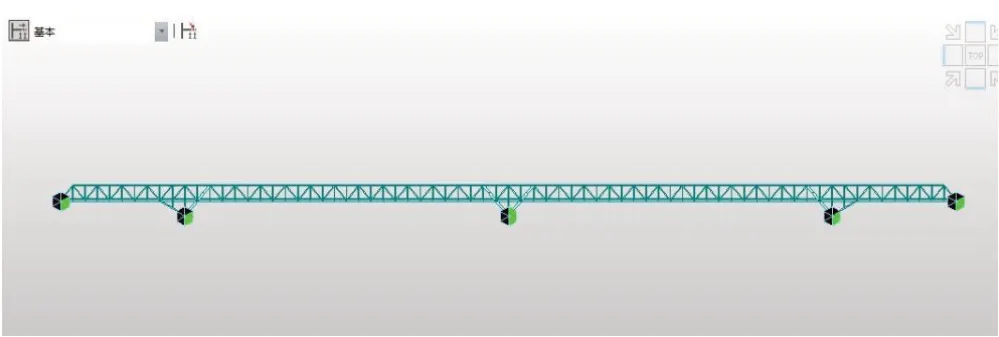
图2 钢桁梁有限元模型
3.3 起拱计算
在改进粒子群算法中,最大迭代次数N 取500 代,种群个体数取50 个,个体学习因子c1、群体学习因子c2均按Bergh[5]等推荐值取为1.495,惯性系数w按迭代次数由0.9线性变化至0.4。在Matlab中,程序经174次迭代后最终收敛。结构各待调整杆件长度调整量计算结果及设计调整量对比如表1所示。
根据杆件制造精度,对计算得到的杆件长度调整量进行取整。从表1 可知,经过取整后,利用升降温法得到的杆件长度调整量与设计调整量大部分偏差为0,部分长度偏差值在±2mm 之内。最大长度调整量偏差值为-90mm,出现在上弦杆A22A23 处,主要原因是设计调整量中考虑了成桥状态下拱肋拱脚处推力引起的钢桁梁中跨梁段伸长90mm,因此在跨中上弦杆A22A23 及下弦杆E22E23 处对杆件长度缩短90mm。对计算得到的上弦杆A22A23 长度调整量考虑拱肋拱脚推力引起的梁段伸长量进行修正,修正后得到的计算调整量与设计调整量偏差为0。
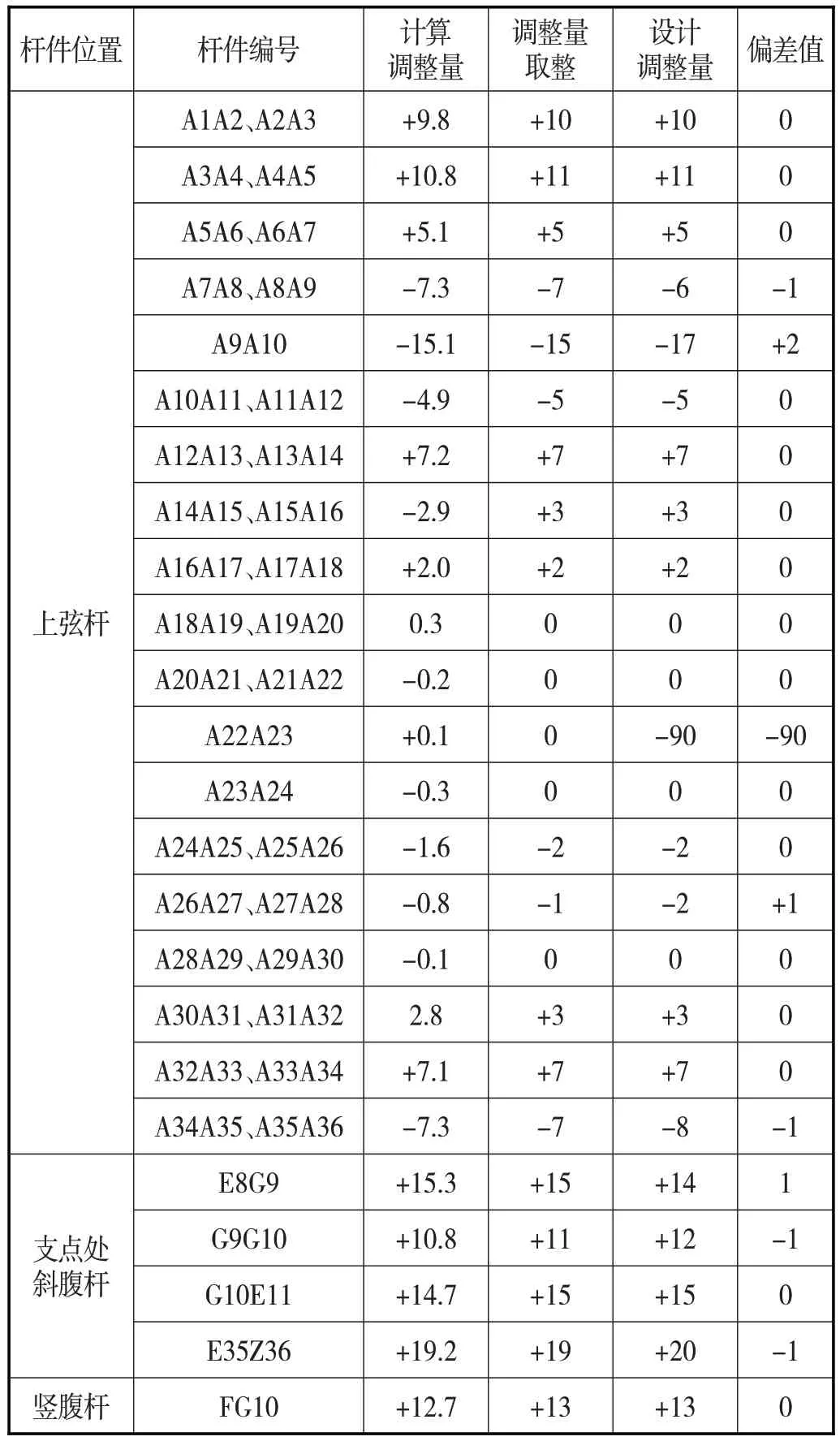
表1 杆件长度调整量计算(单位:mm)
将取整后得到的杆件长度调整量换算为杆件温度荷载,并在有限元模型中进行施加,得到的下弦杆节点竖向位移如图3所示。
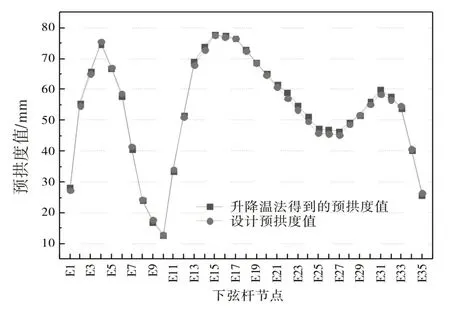
图3 下弦杆预拱度值对比(单位:mm)
采用改进粒子群法结合升降温法得到的下弦杆节点预拱度均在设定的预拱度可行域范围内,与设计预拱度值最大偏差为1.8mm,出现在E22节点。跨中存在偏差的原因主要是采用升降温法进行计算时,施加温度荷载的杆件已处于有应力状态,与设计采用无应力长度计算得到的节点位移会有所差异,但偏差值均在设定的允许范围内。采用升降温法实现起拱产生的支点附加反力如表2所示。

表2 升降温法起拱引起的支点附加反力
经过改进粒子群算法优化后,采用升降温法实现起拱产生的最大附加支反力为3.39kN,出现在两端连接墩位置,引起的附加反力占成桥状态下支点竖向反力的比例最大为0.07%,因此经过优化后升降温法引起的支点附加反力是较小的。可见,该方法在钢桁梁起拱计算中是可行的。
4 结束语
本文通过在升降温法中引入改进粒子群算法进行优化,在下弦杆节点预拱度满足允许偏差的情况下得到了钢桁梁上弦杆及部分斜腹杆的长度调整值,避免了传统起拱方法需要进行重复多次试算的麻烦,且可将起拱引起的支点附加反力及杆件次内力优化至满足工程要求的较小数值。该方法既可用于连续钢桁梁结构,也可应用于含有钢桁梁的组合体系中。
猜你喜欢
交通科学与工程(2021年3期)2021-11-04 09:27:16
山西交通科技(2021年3期)2021-07-14 07:17:06
四川建筑(2021年1期)2021-03-31 01:01:46
建筑机械化(2020年7期)2020-08-15 06:41:32
四川建材(2020年7期)2020-07-26 06:02:08
铁道建筑(2019年6期)2019-07-25 00:36:42
铁道建筑(2018年10期)2018-11-01 10:16:38
中国公路(2017年7期)2017-07-24 13:56:22
科技创新与品牌(2016年8期)2016-09-29 22:25:52
水利科技与经济(2016年10期)2016-04-26 08:40:34
